当导体材料附近存在时变磁场时,会发生电动磁悬浮现象。在本篇博客文章中,我们将通过两个示例来演示如何模拟这一现象。这两个示例分别为电动磁悬浮装置的 TEAM 标准问题和电动悬浮轮。
什么是电动磁悬浮?
永磁体或载流线圈在旋转和/或移动时会产生时变磁场,此时附近的导体便会发生电动磁悬浮现象。这是因为时变磁场会在导体中引起涡流,并使其产生相反的磁场,进而导致导体材料和磁源之间产生排斥力。这一过程是所有磁悬浮系统的基本工作原理。

一块磁铁悬浮在超导体上方。图像由 Julien Bobroff 自行拍摄。已获 CC BY-SA 3.0 许可,通过 Wikimedia Commons 共享。
分析电动磁悬浮的标准问题
我们首先来看看一个基于瞬态电磁分析方法(TEAM)问题 28:电磁悬浮装置的基准模型。该模型包含了一个铝制的导电圆盘,圆盘下方是两个圆柱形的同心线圈,两个线圈承载着方向相反的正弦电流。模型的横截面图和尺寸如下图所示。
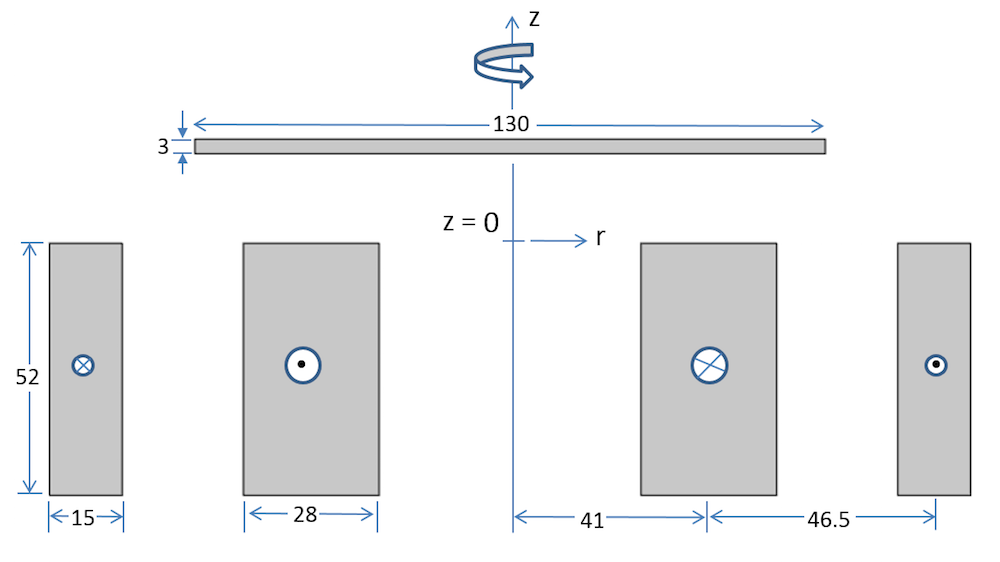
同心线圈和铝盘的横截面视图。所有尺寸均采用毫米为单位。
下图为电动磁悬浮装置的三维模型。
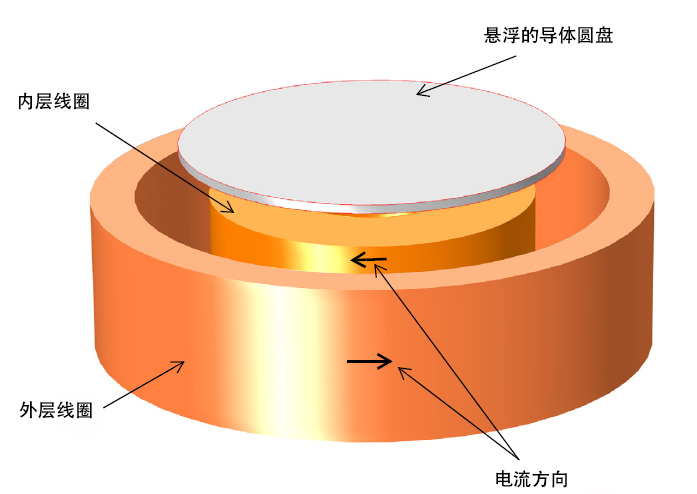
电动悬浮装置的三维模型,图像显示了悬浮的圆盘和两个同心线圈(承载的时变电流方向相反)。
我们在 COMSOL Multiphysics® 软件中使用了二维轴对称几何来对磁悬浮设备进行模拟。由于设备中存在时变电流和感应涡流,所以我们选择使用 AC/DC 模块中的磁场 接口来模拟磁场。此外,我们还使用了均匀多匝线圈 模型中的单个线圈 特征对承载反方向电流的线圈进行模拟,并通过计算力 特征计算出了铝板中的电动力,该特征计算出了麦克斯韦应力张量。
借助全局常微分和微分代数方程 接口,我们将铝板的刚体动力学以常微分方程(ordinary differential equation,简称 ODE)组进行求解。位置和速度的一阶常微分方程为:
由于电磁力会随着铝板和线圈之间距离的变化而不断改变,因此我们必须对磁场 接口进行求解,以获取铝板位置的动态变化数据。考虑到这一点,我们还使用了移动网格 接口来模拟铝板的移动。在完成对振荡圆盘位置的仿真研究后,我们将仿真结果与 TEAM 基准数据进行了比较,如下图所示。
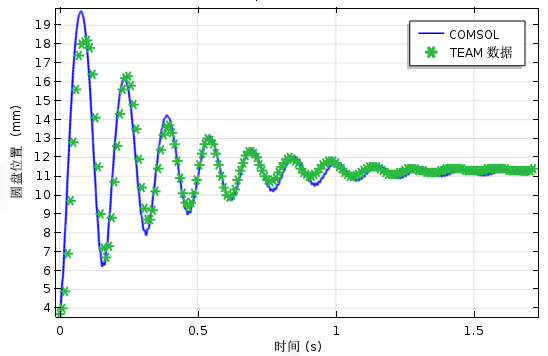
仿真结果与 TEAM 数据的对比。图像展示了铝板垂直振荡和时间的函数关系。
动画演示了 0.6 秒内导电圆盘在两个同心线圈上方的振荡情况。
在 COMSOL Multiphysics® 中模拟电动轮装置
磁源的机械旋转(例如径向磁化的 Halbach 转子)会在被动导电导轨(例如铝)上方引起感应涡电流。涡电流进而会产生与源磁场相反的磁场,在两个磁场的相互作用下,同时产生了升力与推力。此类装置被称为电动悬浮轮(electrodynamic wheel,简称 EDW)。
下图展示了 EDW 悬浮概念在高速运输领域中的应用。相对滑移速度 sl 决定了装置是产生推力还是制动力,它是圆周速度 vc 与平移速度 vx 之差,即 sl = vc — vx,其中 vc = ωmro 且 ωm = ωeP。ωm 在此处表示转子的机械角速度,ωe 表示电角速度,P 表示 Halbach 转子中的极对数量。
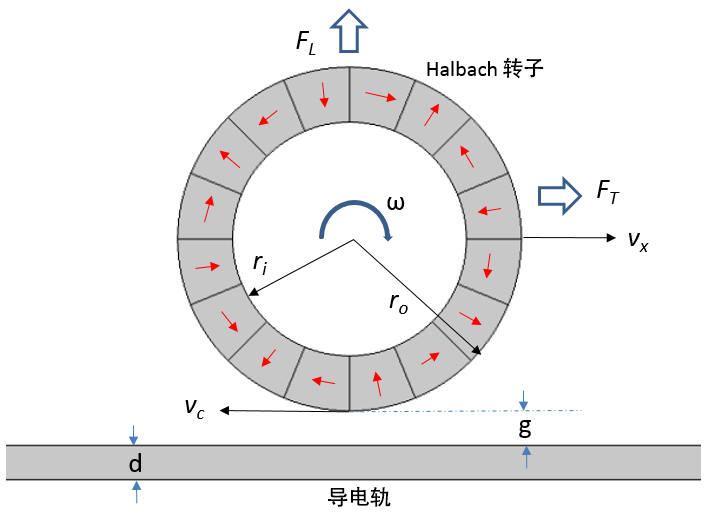
包含四个极对式 EDW 的磁悬浮火车的概念设计图,图像描绘了导电轨道以及旋转和/或行进中的 Halbach 转子。
如果圆周速度大于平移速度(相对滑移速度为正),则系统产生推力。若情况相反,则产生制动力。
通过使用二维和三维的旋转机械,磁 接口,我们可以在一个模型中同时模拟平移和旋转运动。具体操作包括:首先使用指定旋转速度 特征来定义旋转运动,然后使用符号相反的速度(洛伦兹) 项来描述导电轨道上磁悬浮系统(Halbach 转子)的平移运动,接着使用默认的安培定律 特征来模拟永磁体,同时将剩余磁通密度设为 Br = 1.42[T]。由于磁化方向为径向或沿方位角方向,方便起见,我们选择使用圆柱坐标系。
最后,我们通过执行瞬态仿真来求解转子机械角速度的阶跃变化。升力和推力随时间的变化情况如下所示,在这里,我们使用了两种不同的方法对这两种力进行计算,分别是麦克斯韦应力张量(使用“计算力”特征)和洛伦兹法。


升力(左图)和推力(右图)与时间的函数关系,两张图像中均显示了由麦克斯韦应力张量和洛伦兹法计算出的结果。
在第二步中,我们针对一定范围的平移速度执行了多次稳态仿真。当没有旋转运动,或者圆周速度小于平移速度时,则会产生曳力。下图显示了不同速度对应的升力和曳力的模拟结果。


磁浮系统中的升力(左图)和曳力(右图)与速度的函数关系,两张图像中均显示了由麦克斯韦应力张量和洛伦兹法计算出的结果。
动画演示了空气和磁铁中磁通密度的表面图,导轨中的电流密度和磁矢势 Az 的等值线图,同时还绘制了 Halbach 转子的顺时针旋转和场的相互作用。
电动磁悬浮装置模拟总结
在本篇博客文章中,我们演示了如何使用 COMSOL Multiphysics 和 AD/DC 模块来模拟两种类型的电动磁悬浮装置。同时我们还探讨了 TEAM 问题 28:电动悬浮装置,并将仿真结果与文献中的实验数据进行了比较。此外,我们还详细解释了电动轮磁悬浮系统的工作原理。并针对角速度的阶跃变化和不同的平移速度进行了多次仿真分析,最终计算出了由系统产生的升力和曳力/推力。
扩展阅读
- 深入了解本文涉及的示例:
- 了解其他用户如何使用 COMSOL Multiphysics 来求解类似的磁悬浮系统
- 浏览电磁设备系列中的其他博客文章
- 如果您想使用 COMSOL Multiphysics 来模拟磁悬浮系统,或者对于手中的建模过程有其他疑问,请随时联系我们
在本篇博客文章中,我们将和大家一起探讨测试电磁分析方法(Testing Electromagnetic Analysis Methods,简称 TEAM)研讨会问题 30a 中描述的三相感应电机问题。我们使用了旋转机械,磁 接口中的瞬态求解器对二维感应电机进行分析,然后通过将电磁场分析与包含惯性效应在内的转子动力学相耦合,进而研究了电机启动时的动力学问题。在文章的末尾,我们还将标准模型的结果与用 COMSOL Multiphysics 得到的仿真结果进行了对比。
借助仿真创建感应电机模型
三相感应电机由固定部分和旋转部分组成,固定部分称为定子,包括叠压钢片和三相线圈;旋转部分称为转子,包括导电铝条和转子钢。如下图所示,定子中暴露在外的三相绕组分别被标记为 A、B 和 C,三个绕组彼此之间的相位差为 120°。每个绕组的相位都跨越 45°,并由中间的空气隙隔开,且定子的外直径为 5.7 cm。
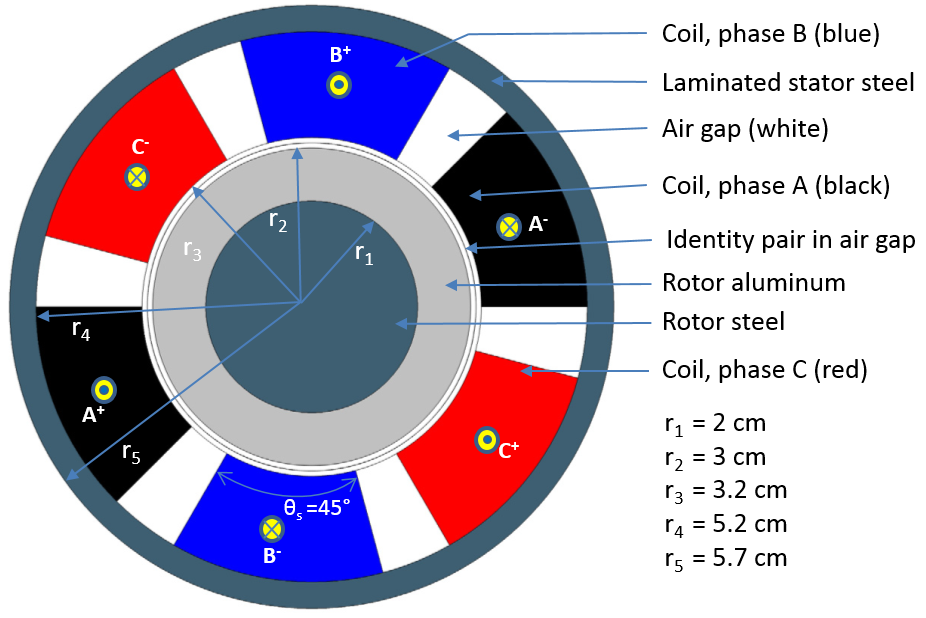
图像描绘了三相感应电机结构的尺寸和相位布局。
电机的电流密度维持在 310 A/cm2,这等同于每个绕组上的 RMS(均方根) 电流 Irms = 2045.175。三相绕组的激励频率为 60 Hz。转子钢和定子钢片的恒定相对磁导率 μr = 30。定子由钢片叠压而成,其电导率 σ = 0;转子钢的电导率 σ = 1.6e6 S/m。同样地,转子铝条的电导率 σ = 3.72e7 S/m。
在 COMSOL Multiphysics 中模拟感应电机的动力学
当在 COMSOL Multiphysics 中创建感应电机的几何模型时,我们创建了两个并集,分别用于定子域和转子域。之后我们通过执行“形成装配”操作来完成感应电机的几何创建,进而可以在转子和定子之间自动创建一致对,此视频对这一操作进行了详细阐释。
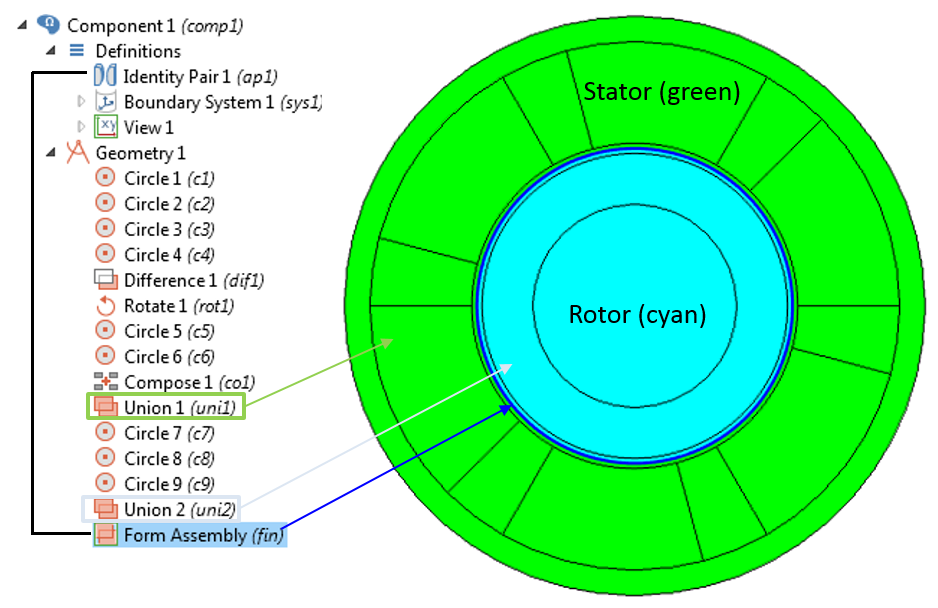
感应电机的几何序列。通过在转子和定子这两个并集之间使用 “形成装配 ”来完成几何创建。
下表列出了该模型中使用的材料属性。测试电磁分析方法的原始文件并未规定材料密度,因此,我们假设转子钢和铝条的密度分别为 7850 kg/m3 和 2700 kg/m3,并分别计算了转子的转动惯量。
| 材料 | 电导率(σ) | 相对磁导率(μr) | 密度(ρ) |
|---|---|---|---|
| 转子钢 | 1.6e6 [S/m] | 30 | 7850 [kg/m^3] |
| 定子钢 | 0 [S/m] | 30 | 非必要条件 |
| 转子铝条 | 3.72e7 [S/m] | 1 | 2700 [kg/m^3] |
| 空气 | 0 [S/m] | 1 | 非必要条件 |
我们使用旋转机械,磁 接口来模拟这个三相感应电机中的电磁场。由于所有的电磁材料属性均为线性,所以无需对默认的安培定律 节点做任何修改。
我们使用了均匀 和多匝线圈 特征来模拟三相。每个绕组的匝数 n0 = 2045。每匝导线都带有 1[A] 的电流,同时三相之间的相位差为 120°。流经三相的电流可描述为:
I A = 1[A]*cos(w0*t)*sqrt(2)I B = 1[A]*cos(w0*t+120[deg])*sqrt(2)I C = 1[A]*cos(w0*t-120[deg])*sqrt(2)
这里,1[A] 为输入电流的 RMS 值,因此我们需要将它与 sqrt(2) 相乘以获取峰值。
使用旋转机械,磁 接口中的计算力 特征可直接获取转子中的电磁扭矩。添加了该特征后,我们在后处理时即可获取该接口中磁力的空间分量(rmm.Forcex_0, rmm.Forcey_0, rmm.Forcez_0)以及轴向扭矩( rmm.Tax_0)。“计算力”特征只对域选择的整个外边界上的 Maxwell 应力进行积分。由于这种方法基于表面积分,因此计算力很容易受到网格大小的影响。使用这种方法时,往往需要执行网格细化研究,才能正确地计算力或扭矩。
另一种方式是使用 Arkkio 方法计算扭矩,即求解磁通密度的体积分。在该方法中,二维旋转电机模型的电磁扭矩可通过下方表达式进行计算:
其中, 为外半径,
为外半径, 为内半径,
为内半径, 为气隙的横截面积。径向和方位角方向上的磁通密度分别为
为气隙的横截面积。径向和方位角方向上的磁通密度分别为  和
和  。参考以下屏幕截图,了解更多关于在 COMSOL Multiphysics 中执行 Arkkio 方法的详细信息。
。参考以下屏幕截图,了解更多关于在 COMSOL Multiphysics 中执行 Arkkio 方法的详细信息。
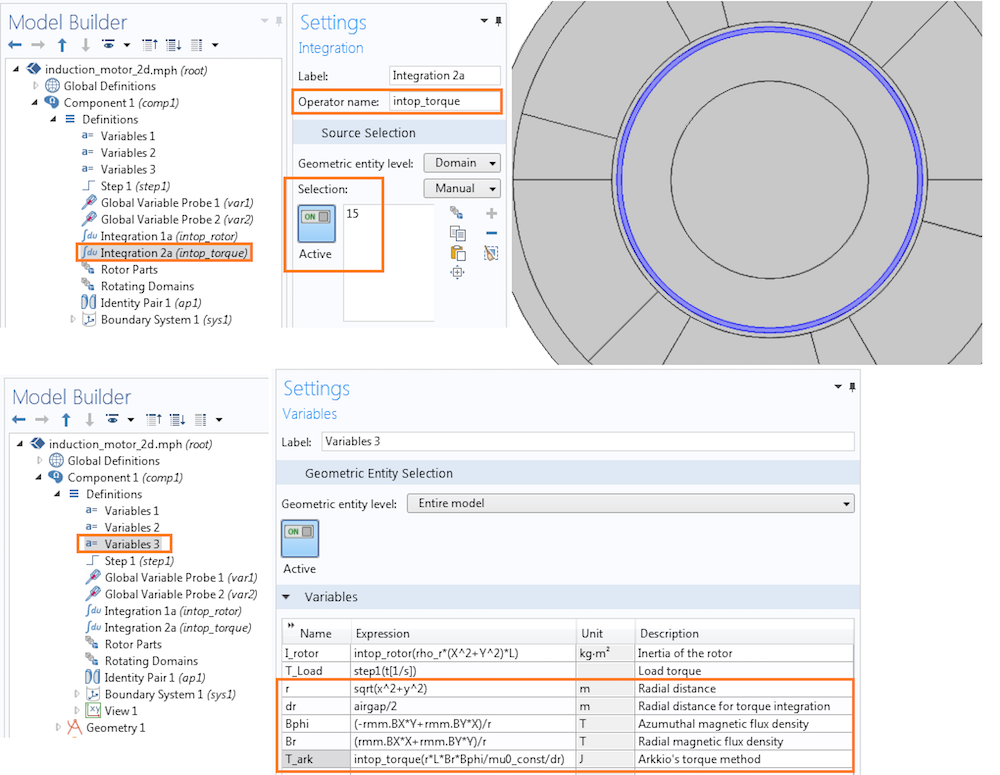
利用 Arkkio 方法计算得出的感应电机的扭矩。
使用全局常微分和微分代数方程接口模拟电机的动力学
转子的旋转运动遵循以下两个方程:
(1)
(2)
其中, 为转子的轴向电磁扭矩,
为转子的轴向电磁扭矩, 为负载扭矩,
为负载扭矩, 为转子的角速度,
为转子的角速度, 为转子的角位置。
为转子的角位置。
通过在如下图所示的两个独立的全局方程 节点内使用全局常微分和微分代数方程 接口,我们成功地模拟了转子的旋转运动。
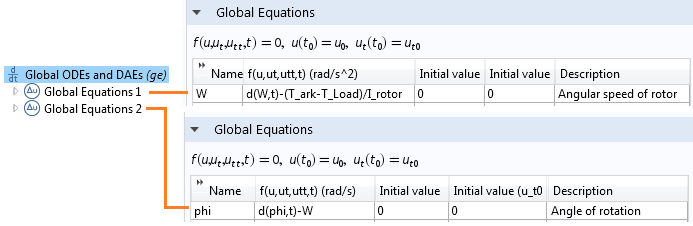
使用 全局常微分和微分代数方程接口执行转子角速度和旋转角的微分方程。
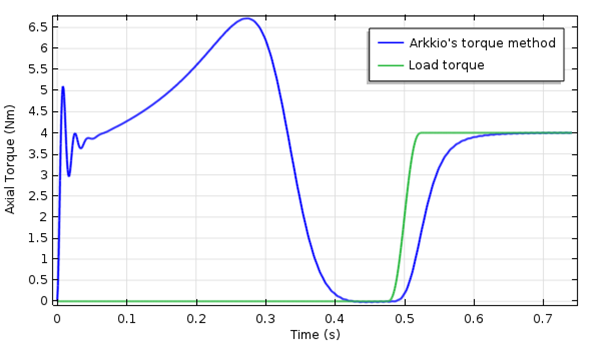
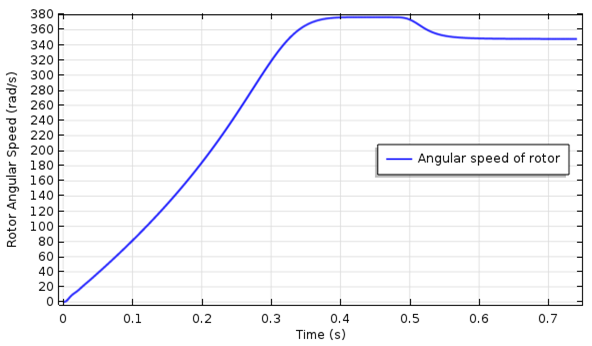
转子瞬态电磁扭矩与时间的关系(左图),以及转子角速度与时间的关系(右图)。
电磁扭矩在启动过程中会表现出振荡行为,并在 0.28 秒左右逐渐达到最高值。当在 0.4 秒左右时,转速完全同步,此时扭矩会降为 0。然后在 0.5 秒时,对其应用一个阶跃变化的负载扭矩,感应电机便会通过降低速度来逐渐产生等量的扭矩。
COMSOL Multiphysics 与 TEAM 问题 30a 的结果对比
为了将电磁扭矩、感应电压及转子损耗与 TEAM 问题 30a 的结果进行比较,我们使用磁场 物理场接口在频域内建立了相同的感应电机模型。该模型通过添加用于描述速度的洛伦兹项,从而引入了旋转运动。您可以点击此链接下载三相感应电机的模型案例。
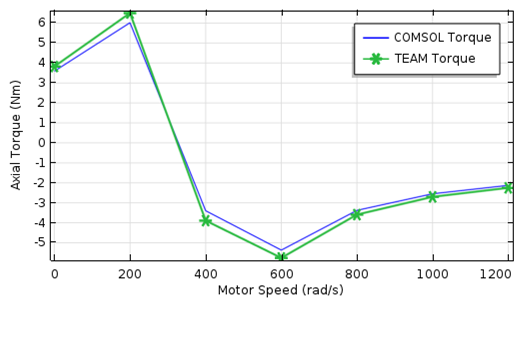
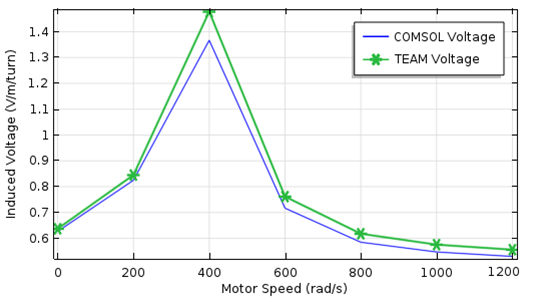
图像将轴向扭矩与电机转速的关系(左图)和感应电压与电机转速的关系(右图)进行了对比。
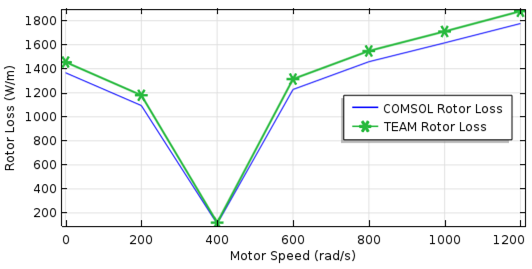
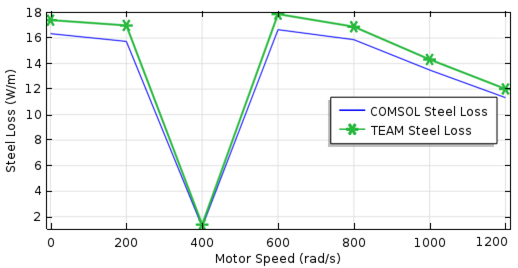
图像将转子损耗与电机转速的关系(左图)和转子钢损耗与电机转速的关系(右图)进行了对比。
更多关于使用 COMSOL Multiphysics 模拟感应电机的资源
- 参考以下教学模型,尝试模拟感应电机:
- 阅读以下博客文章,了解更多关于旋转机械建模的信息:
- 阅读电磁设备系列的更多博客文章
在“电磁设备”系列博客的第一部分中,我们介绍了如何模拟与弹簧和阻尼器相连接的线性电磁柱塞,并计算了柱塞的位置、速度及电磁力。在第二部分中,我们将为您展示安装有制动器/阻挡器的执行器,这个内部器件的作用正是约束线性运动。此外,我们还将讨论如何使用事件、磁场、移动网格 及全局常微分和微分代数方程 接口来模拟此类执行器中的接触与脱离行为。
模拟带制动器的线性电磁执行器
今天,我们将对第一篇博客中的 电磁柱塞教学模型进行一定的修改,也就是在装置内加入一个形状匹配的、可限制柱塞线性运动的制动器。柱塞的其他部件还包括:
- 多匝线圈
- 磁芯
- 非磁导向机构
- 磁性柱塞
如下方的两张图像所示,我们将柱塞和制动器之间的空气域进行了分割,使其与线性振动的结构(映射网格)相匹配。在此结构中,阻尼器和弹簧连接到了柱塞的一端。
当瞬变电流通过螺线管线圈时,它会在柱塞和磁芯中产生一个磁场,磁场的存在使柱塞和磁芯之间产生了吸引力。这一现象随即使柱塞获得了加速度,背向弹簧朝上运动,直到与制动器发生接触。只要电磁力大于弹簧施加的回复力,柱塞就会与制动器保持连接状态。一旦与制动器接触,柱塞的速度便立刻变为零。然而当线圈关闭后,弹簧施加的力将占据主导,拉动柱塞返回到初始位置。我们将借助事件 接口来模拟装置中的接触与脱离机制。您可以点击这里下载模型文件及相关的演示幻灯片。
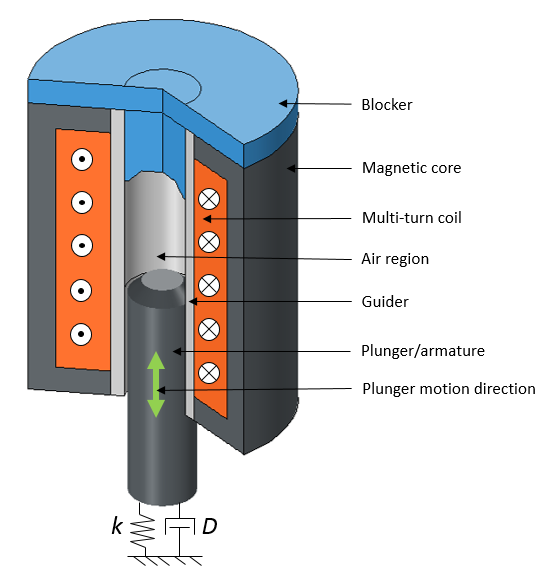
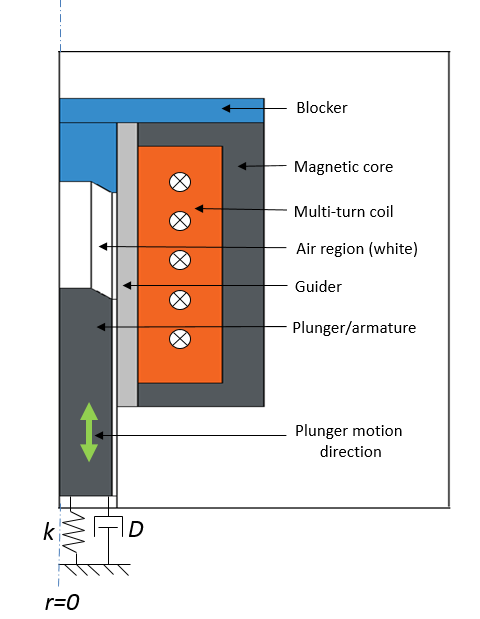
带制动器的电磁柱塞的三维视图(左图)及二维对称视图(右图)。
求解电磁场
在柱塞的仿真过程中,我们使用磁场 接口对设备的电磁场进行了模拟。为了模拟磁性元件(柱塞和磁芯),我们在该接口中添加了安培定律 节点,同时将节点中的“本构关系”设置为“H-B 曲线”。接着,我们添加了一个计算力 节点,这样就能够使用 Maxwell 应力张量方法来计算柱塞的电磁力。同时借助多匝线圈 特征,我们还使用了矩形函数来模拟螺线管绕组,并且传输瞬态电流。
模拟线性运动
为了便于模拟柱塞的线性运动,我们仅在移动域(即位于一致对左侧的柱塞和空气域)中添加了移动网格 接口。振动磁体及电磁柱塞的案例采用了相同的方式。不过,本文案例中的移动网格设置略为复杂,这是因为柱塞和制动器之间的网格体积几乎收缩为零。然而,体积为零的体网格是无法进行数值模拟。因此,我们给收缩网格的高度指定了一个有限值(本案例中为 0.5 mm),该值即表示柱塞和制动器之间存在接触。

移动网格接口的设置,设置中描述的变量是从 系数型边界偏微分方程接口及 全局常微分和微分代数方程接口耦合而来的。
您可以在上图的设置中观察到,我们为柱塞和一小块空气域分配了位置变量  ,用于表示它们在 z 方向上的指定位移,而 r 方向上无任何位移。然而,针对收缩或膨胀空气域的侧边界(“帮助边”),其 z 方向上的指定位移被分配了一个新的变量 ZHelp。如下图所示,我们可以使用一个单独的系数型边界偏微分方程 接口来求解该变量。如需了解详细了解此功能,请参考关于如何使用移动网格接口模拟平移运动以及旋转和直线平移的博客文章。
,用于表示它们在 z 方向上的指定位移,而 r 方向上无任何位移。然而,针对收缩或膨胀空气域的侧边界(“帮助边”),其 z 方向上的指定位移被分配了一个新的变量 ZHelp。如下图所示,我们可以使用一个单独的系数型边界偏微分方程 接口来求解该变量。如需了解详细了解此功能,请参考关于如何使用移动网格接口模拟平移运动以及旋转和直线平移的博客文章。

系数型边界偏微分方程接口的设置,它用于求解变量 ZHelp。

柱塞的网格图显示了空气域中结构化网格的收缩。
使用事件 接口模拟接触和脱离操作
接下来,我们将添加事件 接口,目的在于模拟柱塞与制动器/阻断器接触时,线圈电流被关闭后,以及柱塞下落时的情形。我们在数学 > 常微分和微分代数方程 接口分支中添加事件 接口,该接口的添加方式与 COMSOL Multiphysics 中的其他物理场接口类似。
首先,在事件 接口中定义一对离散变量,它们满足两个条件:时间上不连续,并且十分适用于模拟柱塞的接触与非接触状态。如下图所示,离散变量 PlungerState 的初始值被设为零,也就是说,使用离散状态 特征时柱塞处于非接触状态。初始值为零表明了仿真开始时柱塞处于非接触状态。变量 PlungerState 被应用于全局常微分和微分代数方程 接口,这样能更准确地模拟处于接触和非接触状态的柱塞。该变量的离散值可为零或一,这取决于指示器状态。这一设置类似于我的同事 Water Frei 在之前发布的博客文章中探讨的有关恒温器的控制逻辑。


离散状态接口用于定义柱塞的状态,其中初始状态为脱离接触(左图)。事件接口中的两种指示器状态取决于柱塞的位置和受力(右图)。
接下来,我们要对指示器状态进行定义,即确定PlungerState 变量从 0 被触发为 1(或相反过程)的条件。指示器状态的意义是对指示事件将何时发生的变量进行定义。我们定义了两种指示器状态:关闭 和打开。关闭 指示器变量被定义为 z_max-p,它会平稳地由正值变化为负值。初始为正值说明了该变量的位置位于参数 z_max 之上,而本案例中 z_max 表示的是柱塞即将与制动器/阻断器发生接触的位置。按照相似的方式,打开 指示器变量被定义为 k*p-Fz,只要固定到柱塞的弹簧的力  大于柱塞的电磁力
大于柱塞的电磁力  ,该变量就会从负值平稳地变为正值。
,该变量就会从负值平稳地变为正值。

事件接口中的隐式事件设置,我们对其中的 PlungerState 变量进行了重新初始化。
由于不清楚这些事件触发的确切时间,因此接下来我们将在隐式事件 特征中编写恰当的逻辑条件来改变柱塞状态。指示器状态在打开 时大于零,在关闭 时小于零,如上图所示,我们据此添加了两个隐式事件 特征,将柱塞状态重新初始化为零或一。在瞬态仿真中,当满足逻辑条件时这些事件就会触发。事件被触发后,瞬态求解器便会停止运行,对全局常微分和微分代数方程 接口中位置和速度方程的 PlungerState 变量进行初始化,然后重新启动。我们将在下一节中对此进行讨论。
模拟柱塞装置的动力学特征
本系列博客文章的第一篇详细介绍了如何将全局方程引入全局常微分和微分代数方程 接口,并使用了多种不同的变量来描述与弹簧相连的电磁柱塞的运动,这些变量包括:
- 弹簧常数
- 阻尼系数
- 柱塞位置
- 速度
- 柱塞质量
- 柱塞受到的与弹簧弹力相反的电磁力
就柱塞状态 指示器而言,当 PlungerState 变量的值为一(即处于接触状态)时,方程(2)中的速度将被重置为  ,方程(3)中的位置将被重置为
,方程(3)中的位置将被重置为  。但是如果柱塞处于非接触状态,那么方程(2)和(3)便可以分别表示速度方程和位置方程。
。但是如果柱塞处于非接触状态,那么方程(2)和(3)便可以分别表示速度方程和位置方程。
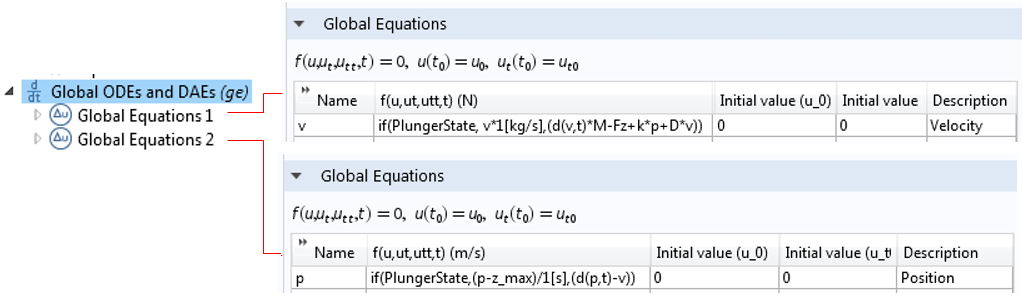
使用 全局常微分和微分代数方程接口和逻辑表达式来指定用于描述速度和位置的微分方程,柱塞接触和脱离接触的实现是借助 PlungerState 变量完成的。
分析结果
下图显示的是柱塞模型时域仿真的一组具有代表性的结果。仿真结果展示了是柱塞与制动器接触时,以及当线圈电流被关闭、柱塞下落时的情况。
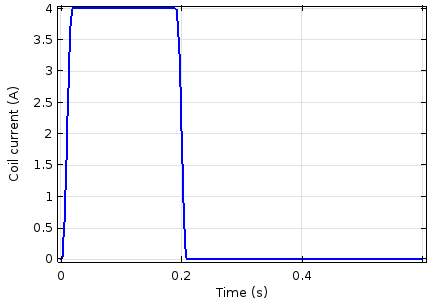
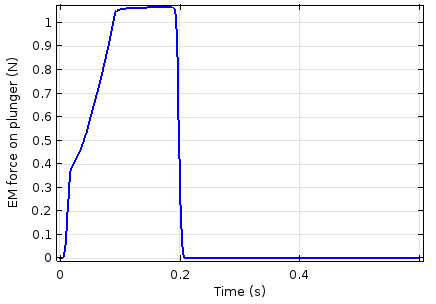
通过线圈的电流随时间的变化(左图)及电磁力随时间的变化(右图)。
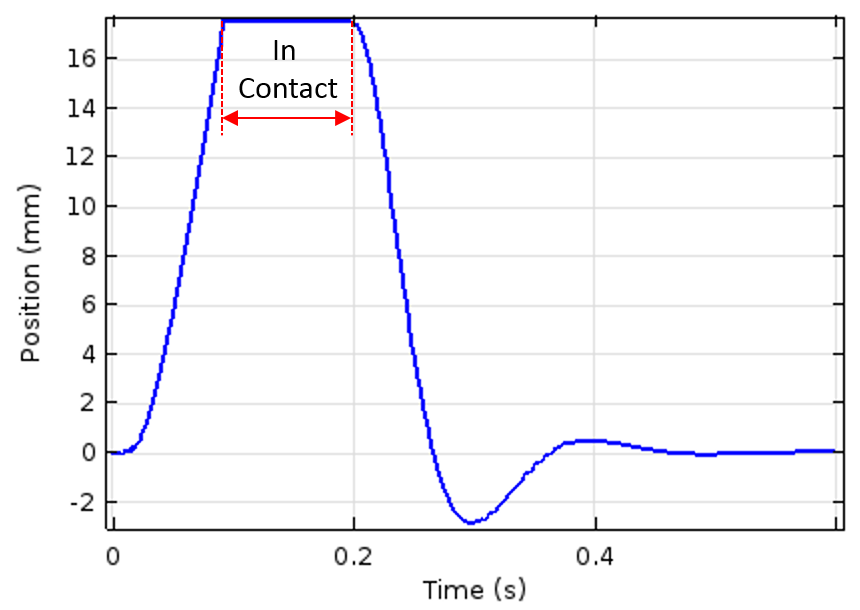
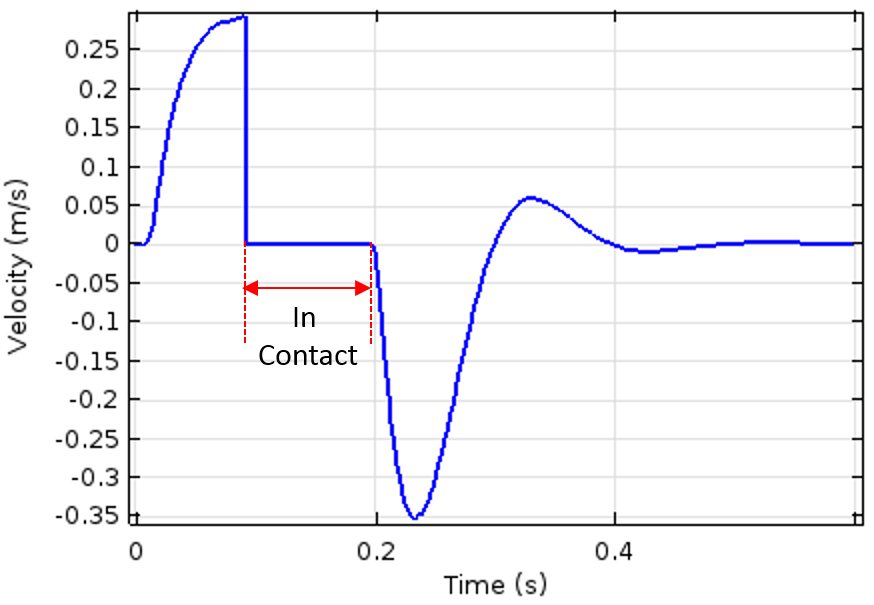
柱塞位置(左图)和速度(右图)随时间的变化情况。此外,绘图还显示了柱塞与制动器保持接触状态的时间间隔。
三维动画显示了带制动器的柱塞的磁通密度模的绘图(左侧);右侧图表与动画对应,实时显示了装置的位置、速度及通过线圈的电流。
总结
在本文中,我们通过引入事件 接口对柱塞的接触与脱离行为进行了模拟,从而扩展了第一篇博客文章中介绍的电磁柱塞建模技术。我们借助磁场 物理场计算出了柱塞的瞬态电磁力,并将柱塞的线性/平移运动耦合到移动网格 接口和系数型边界偏微分方程 接口,由此对柱塞的运动进行计算。此外,我们还将全局常微分和微分代数方程 接口与其他所有接口耦合起来,进而计算出柱塞的瞬态位置和速度。
了解更多关于电磁设备建模的信息
- 自己动手:在“案例下载”页面下载带制动器的电磁柱塞教学模型
- 返回上一步,探讨不带制动器的电磁柱塞教学模型
- 查看电磁设备系列的其他博客文章
电磁柱塞是一种可将电能转换为线性机械运动的机电装置,它产生的机械运动可用于移动外部载荷,例如关闭电磁阀、关闭/打开电磁继电器等。电磁柱塞由多匝线圈、磁芯、非磁导向机构和磁性柱塞构成,在本篇博客文章中,我们将为您介绍如何模拟电磁柱塞的性能表现和动力学特征。
电磁执行器的广泛工业应用
部分工业应用离不开线性运动,线性电磁执行器在其中起到了不可或缺的作用,其用途包括打开或关闭、推动或拉动载荷等,常见的应用装置包括电磁继电器、电磁阀、断路器及接触器。此外,农业、建筑业、汽车工业和机器人产业中也常能看到此项技术。
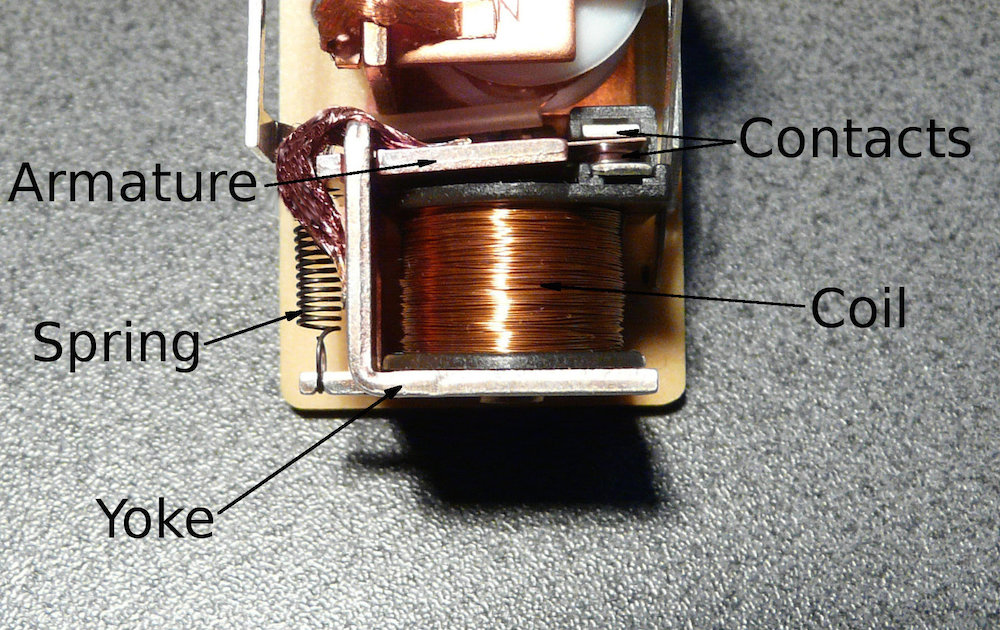
一个由机械弹簧、线圈、电枢及磁轭构成的简易电磁继电器。
借助 COMSOL Multiphysics 的仿真功能,我们能够将线性电磁执行器的多项性能(例如驱动力和冲程、载荷曲线、效率和工作频率)作为尺寸、材料、输入电压和电流等设计参数的函数,并对其进行评估。在下文中,我们将通过一个案例来探讨具体的操作方式。
在 COMSOL Multiphysics 中模拟线性电磁柱塞
在本篇博客文章中,我们选用了一个由多匝线圈、磁芯、非磁导向机构及磁性柱塞构成的简易电磁柱塞。如下图所示,这些零件固定在弹簧和阻尼器上。瞬态(方波脉冲)电流经过螺线管线圈,在磁芯和柱塞周围形成了磁场。此磁场在磁芯和柱塞之间产生了吸引力,使柱塞加速并背向弹簧向上运动。当吸引力达到最大时,柱塞完全置于磁芯之中,此时形成了最低磁阻的磁通量路径。
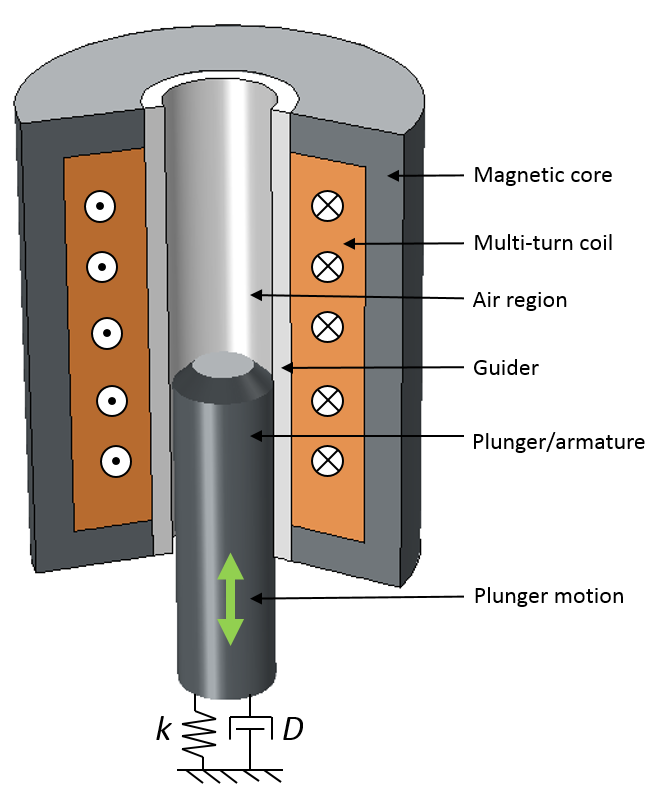
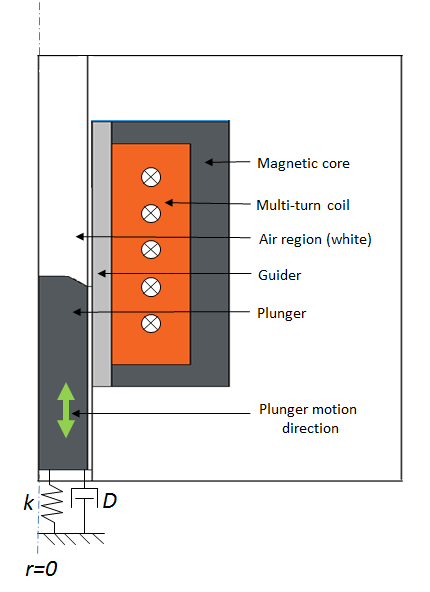
电磁柱塞的三维截面图(左)和二维轴对称图(右)。
我们在电磁柱塞教学模型中使用了一个二维轴对称几何几何,并添加了磁场,移动网格 接口、全局常微分和微分代数方程 接口以及瞬态 研究。接着,我们在全局定义 > 参数 中定义了模型参数,如下方的屏幕截图所示。
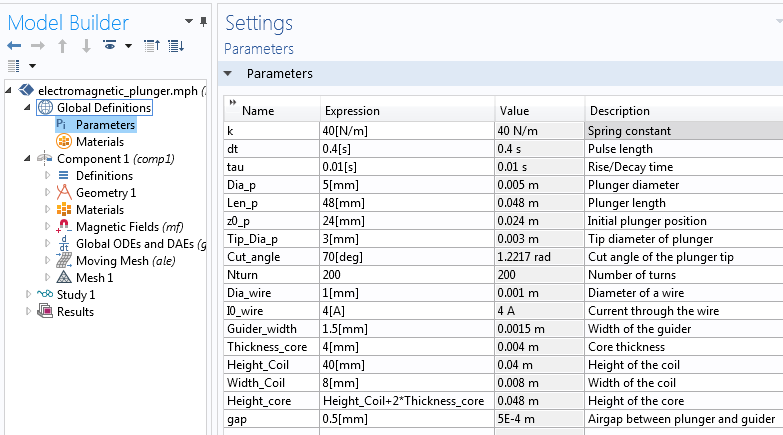
电磁柱塞模型的设计参数列表。
由于柱塞会进行大幅度的平移运动,因此我们需要使用滑动网格对其进行模拟。首先,为静态部件和移动部件分别创建一个单独的并集。然后,执行“形成装配”操作以定型几何,确保在界面自动创建“一致对”。为了更方便地进行建模,还可以为导向机构、磁芯、线圈、柱塞、源边界、目标边界和计算力边界创建多个选择,如下图中的彩色方框所示。
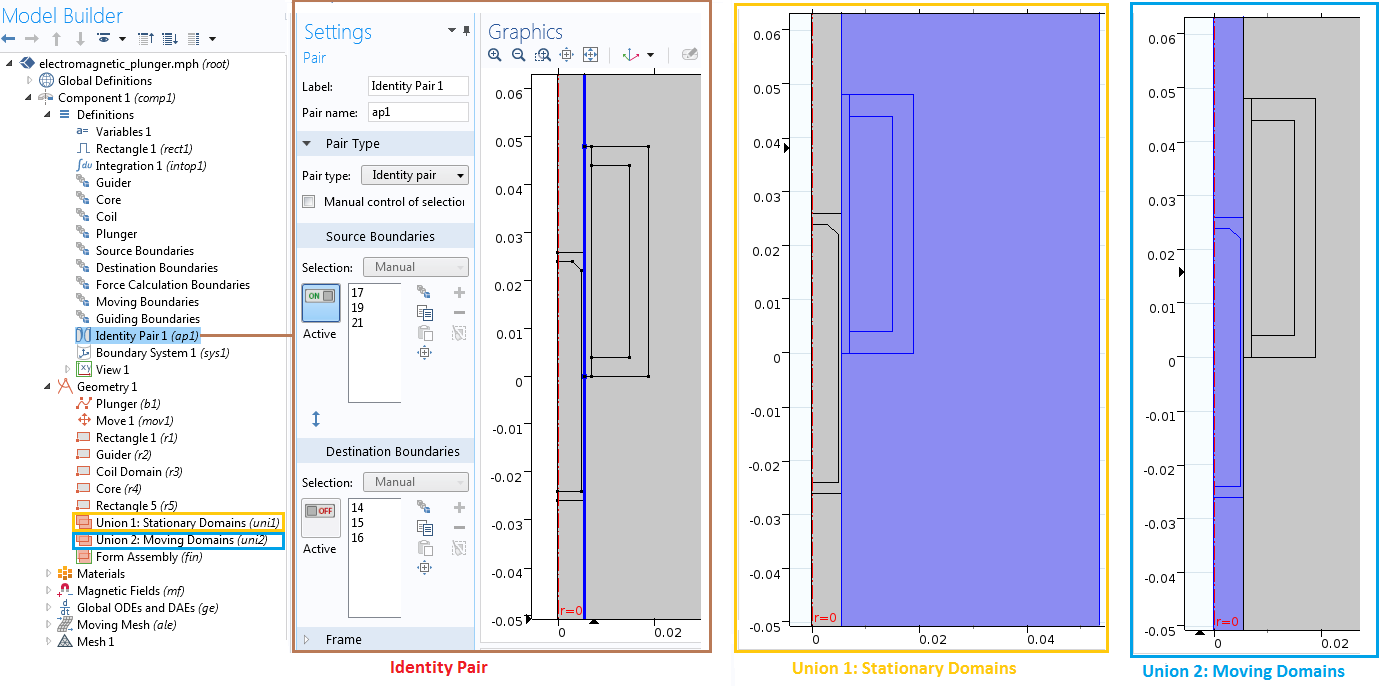
“模型开发器”中静态域、移动域和一致对选项。
执行动态研究需要计算出柱塞质量  ,故我们定义了一个积分算子 Integration 1 (intop1),用于计算柱塞的体积,并将它与指定的材料密度相乘。在本案例中,我们将柱塞的材料设为 Low Carbon Steel 1002(mat 3),即低碳钢。此外,我们还定义了电磁力的变量 ,并通过它来计算柱塞的 Maxwell 应力张量。记住,在执行计算之前,首先需要将计算力 功能添加到力名称为
,故我们定义了一个积分算子 Integration 1 (intop1),用于计算柱塞的体积,并将它与指定的材料密度相乘。在本案例中,我们将柱塞的材料设为 Low Carbon Steel 1002(mat 3),即低碳钢。此外,我们还定义了电磁力的变量 ,并通过它来计算柱塞的 Maxwell 应力张量。记住,在执行计算之前,首先需要将计算力 功能添加到力名称为 force 的磁场 接口中。我们将在下一节中介绍具体的操作步骤。
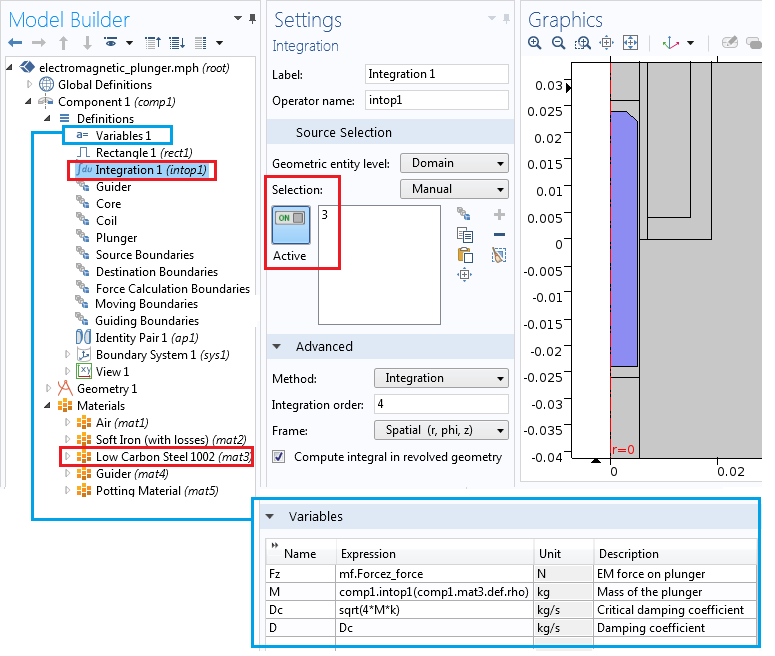
积分耦合算子与变量。
模拟电磁场
磁场 接口可用于模拟设备中的电磁场。首先,我们使用安培定律 节点来模拟构成柱塞和磁芯的非线性材料,并将两个节点的“本构关系”都设为“H-B 曲线”。通过相似的方式,我们在“软铁”制成的磁芯区域添加了非线性 H-B 曲线。请注意,虽然我们可以使用同一个安培定律 节点来模拟柱塞和磁芯,但是使用两个单独的安培定律 节点会让我们可以更加方便地根据具体需求采用不同的本构关系。
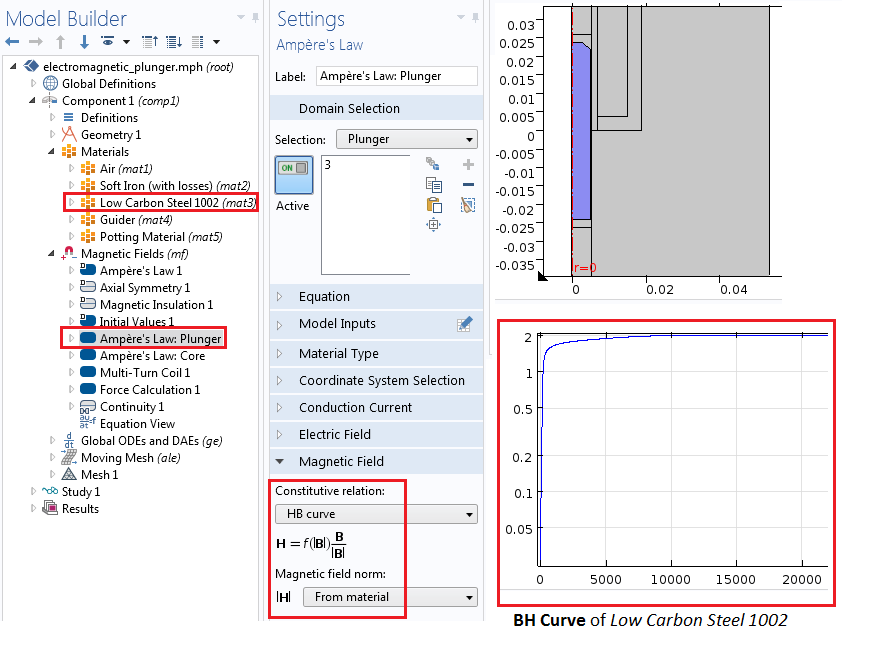
安培定律节点的设置,图象显示了在非线性磁性柱塞区域中应用 H-B 曲线。
接下来,借助磁场 接口中的多匝线圈 功能,我们可以创建螺线管绕组,它是由200 匝 (Nturns = 200) 直径为 1 mm (Dia_wire = 1 mm)、电导率为 6e7 s/m 的线圈构成。通过线圈的电流是被定义为 I_coil = I0_wire*rect1(t[1/s]) 的方波脉冲,其中 rect1() 是定义 > 方波 1 节点中定义的方波函数,最大电流为 I0_wire = 4 A。
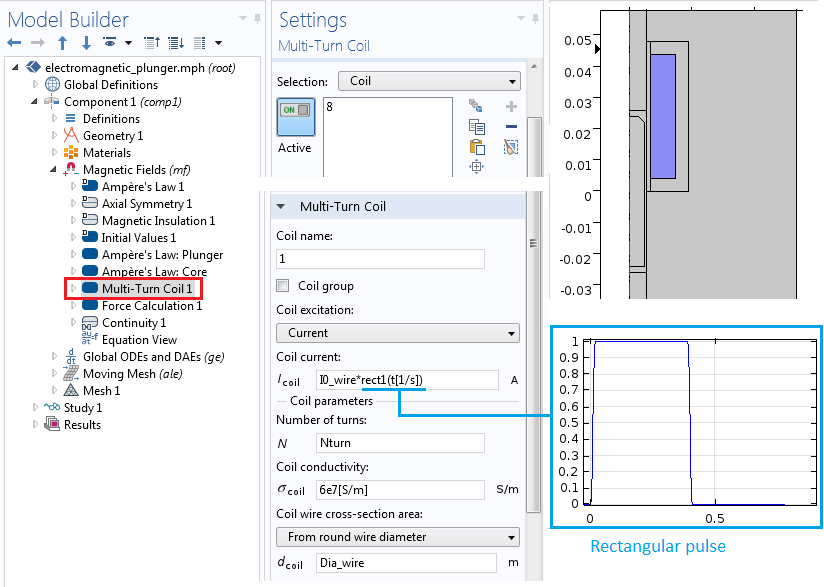
“多匝线圈”特征包含了开路、匝数、电导率及横截面积等内容的设置。
接下来,通过将“计算力”特征添加到柱塞域对柱塞的电磁力进行计算,计算结果包括柱塞上由于内部瞬态电流引起的 Maxwell 应力张量。由于柱塞是磁性材料,而 Lorentz 力仅支持导电非磁性材料,因此我们不能使用计算 Lorentz 力的方法。此外,Maxwell 应力张量方法对网格非常敏感,它要求添加了“计算力”功能的表面的网格剖分更加精细。为了获得更精准的计算力,您可以执行网格细化研究。
接下来,我们将在“一致对”物理场中添加“连续性”边界条件,以便耦合固定域和移动域之间的磁场。
添加全局常微分和微分代数方程
借助 COMSOL Multiphysics 的全局常微分和微分代数方程 接口,我们可以对电磁柱塞的刚体动力学进行模拟。固定在弹簧(弹簧常数为k)和阻尼器(阻尼系数为 D)上的电磁柱塞的运动方程如下:
(1)
{d^2p} {dt^2}
+D\frac
{dp}{dt}+kp-F_z(p,v,t)=0
其中, 表示柱塞在 z 方向上的位置, 表示速度, 表示柱塞质量,
表示速度, 表示柱塞质量, 表示抵抗弹簧的电磁力。
表示抵抗弹簧的电磁力。
上述方程可改写成两个独立的微分方程,分别描述柱塞的位置和速度:
(2)
以及
(3)
-v=0
我们可以使用全局常微分和微分代数方程 接口求解上述方程,并添加两个单独的全局方程,如下所示。
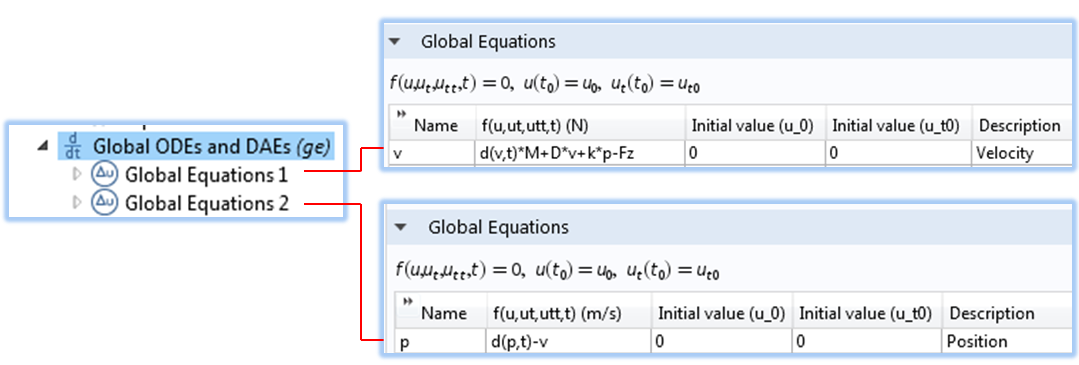
使用 全局常微分和微分代数方程接口指定用于描述速度和位置的微分方程组。
模拟平移运动
为了模拟电磁柱塞的平移运动,我们特意添加了移动网格 接口。与振动磁体教学模型中的建模技术相似,我们可以仅在移动域(柱塞和空气域位于一致对的左侧)内应用移动网格 接口。为了简化移动网格的设置,空气域被划分到了一致对的左侧。顶部和底部空气域的网格被设置成收缩或膨胀网格,中间空气域的固定网格则会根据指定边界位移的设置而移动。
为了彻底封闭柱塞,我们设置中间空气域的边界为指定网格位移 特征,并使特征中的变形等于位置变量 。每一个变形空气域内的两条垂直边界(位于选择列表中“指导边界”下)仅在 r 方向上受到约束。下图显示了移动网格 接口的设置。
请注意:柱塞连同其周围的小型空气域都在移动。事实上,这有利于简化移动网格 接口的网格剖分设置,因为这一设置允许我们将网格映射到其他两个空气域。我们将在本系列博客的第二部分中处理更具挑战性的网格设置问题。
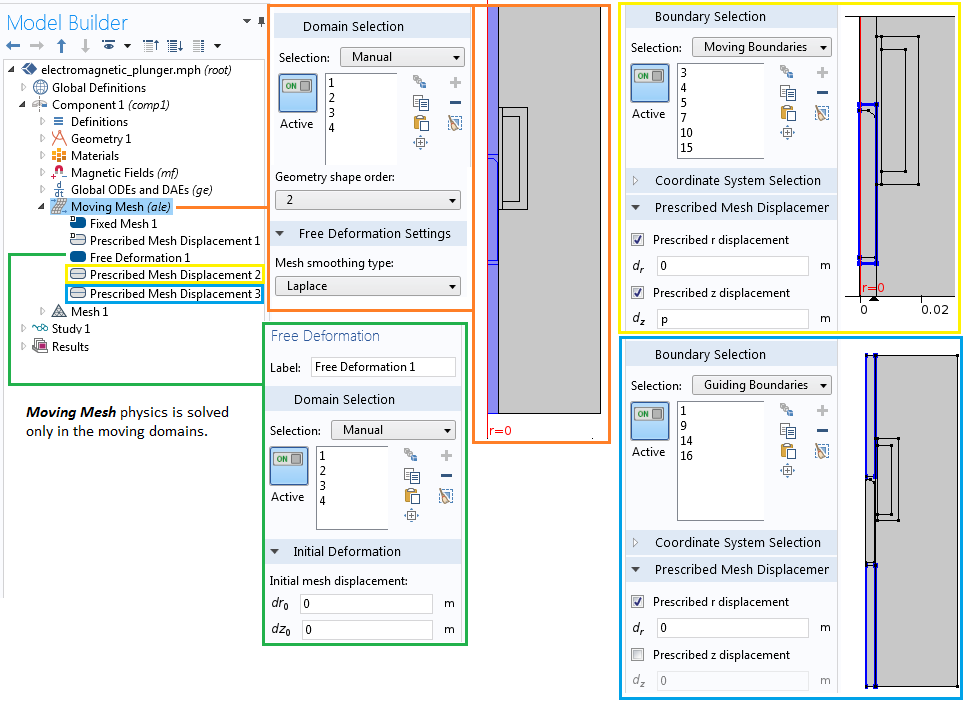
移动网格接口的设置窗口。
紧接着,我们向静态域指定了固定网格,并指定了移动组件在 z 方向上的变形。此外还使用了来自全局常微分和微分代数方程 接口的位置变量 对指定的运动进行了定义。
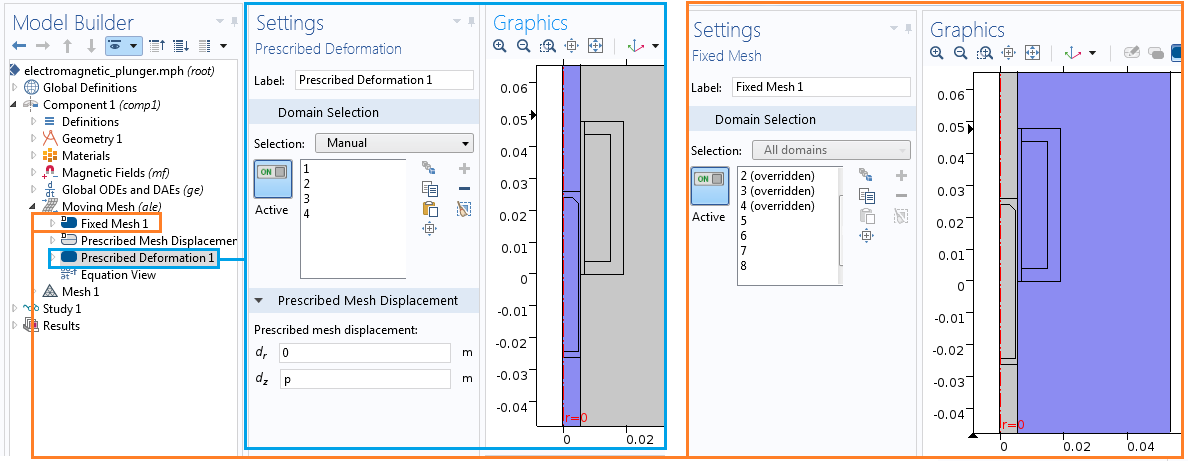
设置 移动网格接口的另一种方法。
评估仿真结果
电磁柱塞的瞬态研究结果如下图所示。我们分别对两个不同的阻尼系数值运行了仿真。正如预期,当阻尼系数小于临界阻尼系数时,系统将表现出更强的振荡性,然而其过冲的上升时间也变得更短。


柱塞位置(左图)和柱塞承受的电磁力(右图)随阻尼系数和时间变化的曲线。


柱塞速度随阻尼系数和时间变化的曲线(左图),以及流经线圈的电流随时间变化的曲线(右图)。
下方动画演示了对线圈施加瞬态电流时,柱塞的动力学特征。左侧图像为电磁柱塞模型及其磁通密度的三维可视化绘图,右侧的两张绘图分别描述了柱塞的位置和通过螺线管线圈的电流。
关于模拟电磁柱塞和执行器的结语
在本篇博客文章中,我们介绍了如何使用三个不同的物理场接口对线性/平动电磁执行器进行建模,这三个接口分别是磁场,移动网格 接口和全局常微分和微分代数方程 接口。我们将磁场 接口与移动网格 接口及描述柱塞动力学的微分方程进行了充分的耦合,从而计算出了电磁力、柱塞位置以及柱塞速度。
随后我们还将发表另一篇博客文章,进一步介绍如何模拟振荡受限的柱塞的动力学特征,同时还将演示如何使用事件 接口来模拟电磁柱塞的接触和释放操作。敬请期待!
了解更多有关模拟电磁设备的博客文章
磁齿轮是利用永磁体或电磁体进行扭矩-速度转换的非接触式机构,用于多种可再生能源应用中,能提高风能、海洋能和飞轮储能的速度,以与电磁发电机的规格相匹配。和机械齿轮不同的是,磁齿轮内置过载保护,因工作时无摩擦而具有高可靠性,且无需润滑。今天,我们将讨论如何利用 COMSOL Multiphysics 模拟二维和三维的磁齿轮。
磁齿轮的构造和工作原理
磁齿轮一般包含三个转子,每个转子的磁极对数均不同,由很小的空气间隙隔开。铁磁性钢磁极(中间转子)调整内外转子产生的磁场,并在空气间隙中生成空间谐波。经过调整的磁场经钢磁极与另一侧的磁场相互作用,从而传递扭矩。
下图说明了典型磁齿轮的工作原理。为简单起见,我们选择直线磁齿轮结构。不过,它的工作原理还是与旋转磁齿轮相同。在这个结构中,模型的外部转子包含 11 对磁极,内部转子包含 4 对,中间转子包含 15 对。它们分别记作  、
、 和
和  。
。
内部转子上的 4 对磁极产生一个 4 次谐波占主导的磁场。然后该磁场经 15 对钢磁极的调整,产生一个 11 次谐波占主导的磁场。调整后的磁场与外部转子产生的可传递扭矩的 11 次谐波占主导的磁场相互作用。扭矩由此产生,因为此时外部转子产生的磁场谐波分量与调整后的内部转子磁场产生的谐波分量相匹配。
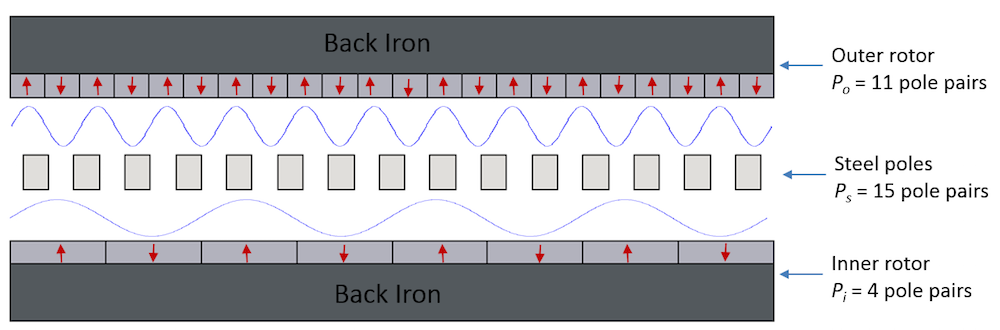
上方的示意图显示了直线磁齿轮的谐波分量。红色箭头表示永磁体的磁化方向。蓝色曲线显示内外部转子产生的磁场。图中未显示转子间的空气间隙(虽已放大)。
为使扭矩密度最高,每个转子的磁极对数应遵循以下关系:
为使传递的扭矩最大,所有三个转子的磁极对和角速度之间的关系应如下:
其中  、
、 和
和  分别表示内部转子、外部转子和钢磁极的速度。如果中间转子保持静止,速度和磁极对的关系则为:
分别表示内部转子、外部转子和钢磁极的速度。如果中间转子保持静止,速度和磁极对的关系则为:
、 和 的最佳组合是使扭矩的波动最小。这样的波动主要由齿槽扭矩引起,这是由永磁电机和钢磁极之间的磁场相互作用而产生。使齿槽扭矩最小的参数称为齿槽因子。它表示为以下方程:
其中,LCM 指最小公倍数。当  时,齿槽扭矩最小。此处展示的所有示例均满足该条件,且铁磁性钢磁极保持静止。
时,齿槽扭矩最小。此处展示的所有示例均满足该条件,且铁磁性钢磁极保持静止。
磁齿轮的类型
根据工作方式,磁齿轮可分为三种类型:直线磁齿轮 (LMGs)、同轴磁齿轮 (CMGs) 和轴向磁齿轮 (AMGs)。对于直线磁齿轮和同轴磁齿轮,磁通量通常沿轴心线径向向内或向外生成。然而对于轴向磁齿轮,磁通量线创建后则平行于转子轴。在本篇博客文章中,我们将利用 COMSOL Multiphysics 展示这三种磁齿轮的示例。
同轴磁齿轮
同轴磁齿轮包含三个磁极对数不同的同心转子,如下图所示。内部转子由八个永磁体 (PMs) 和一个软铁轭组成,软铁轭形成向外的磁通量,使 2 对磁极聚焦于转子。外部转子包含 20 个永磁体和一个软铁轭,软铁轭形成向内的磁通量,使 5 对磁极聚焦于转子。在内外转子中,永磁体按照海尔贝克阵列结构排列。七块钢置于中间的静止环中,钢块之间的间距相同,形成一个包含 7 对磁极的静止转子。


左图:同轴磁齿轮示意图,显示内部转子、外部转子和静止钢磁极。红色箭头表示永磁体的磁化方向。永磁体这样排列可以使内部转子成为向外磁通量的焦点,外部转子成为向内磁通量的焦点。右图:第一到第四象限依次是:磁通密度(模)、磁矢势 (Az)、径向磁通密度 (Br) 和网格图。
本示例中选取的磁极对数使齿轮比为 5:2,作为齿槽因子的最小齿槽扭矩为 1。在 COMSOL Multiphysics 中,我们使用 “AC/DC 模块”中的旋转机械,磁场接口模拟同轴磁齿轮的二维横截面。因为该模型由三个独立零件构成,我们必须使用形成装配将这几个零件组装成一个装配并确定最终的几何,这样才能在空气间隙区域创建两个独立的一致对。
我们使用 “B-H/H-B” 曲线将非线性材料模型加入到软铁域中。不过,静止钢磁极片的模拟则是使用相对磁导率  的线性材料。使用指定旋转速度功能可以使内外转子旋转。通过计算力功能,使用 Maxwell 应力张量法计算内外转子上的轴向扭矩。
的线性材料。使用指定旋转速度功能可以使内外转子旋转。通过计算力功能,使用 Maxwell 应力张量法计算内外转子上的轴向扭矩。
上面的动画展示了磁通密度的表面图和磁矢势  的等值线图。其中外部转子顺时针旋转,内部转子逆时针旋转,并显示磁场的相互作用。
的等值线图。其中外部转子顺时针旋转,内部转子逆时针旋转,并显示磁场的相互作用。
内外转子上的轴向扭矩曲线。内部转子上的扭矩波动较大(磁极对较少)。
您可以从“案例下载”中下载示例模型文件。其中可以找到几何序列文件、COMSOL 模型文件以及提供详细步骤说明的 PDF 文件。
轴向磁齿轮
轴向磁齿轮的工作原理与上面介绍的同轴磁齿轮相同。在本设计中,转子沿轴向一个个堆叠在一起,而非按径向排列,转子之间存在很小的空气间隙。因为磁场相互作用的表面很大,且三个转子的长度相同,所以与同轴磁齿轮相比,轴向磁齿轮的扭矩密度更大。左下图描绘了典型的轴向磁齿轮三维构造。


左图:轴向磁齿轮示意图,描绘了低速转子、高速转子和静止钢磁极。黑色箭头表示永磁体的磁化方向。右图:该仿真显示了磁通密度(使用对数刻度的表面图以及面上箭头图)和网格图。
请下载教程,尽情探索模型设置背后的所有细节。这个特别的示例包含了一些模型文件,用于使用参数化扫描进行稳态研究,还包含了一个轴向磁齿轮的全三维时域仿真,其中使用了旋转机械,磁场接口。其中还包含了一些稳态研究和时域研究的仿真结果。
上面的动画显示了磁通密度模的表面图和面上箭头图。其中高速转子顺时针旋转,低速转子逆时针旋转,并显示磁场的相互作用。
实际上,通过解算高速转子和低速转子之间不同角位置的稳态研究,可以获取磁齿轮的扭矩传递。通过稳态研究中的参数化扫描可以改变角位置。但是,对于瞬态仿真,则需要建立瞬态研究。有趣的是,您将会从这两项研究中得到完全相同的扭矩传递。
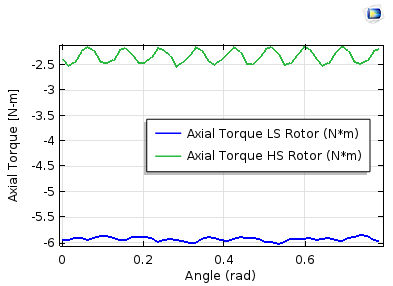
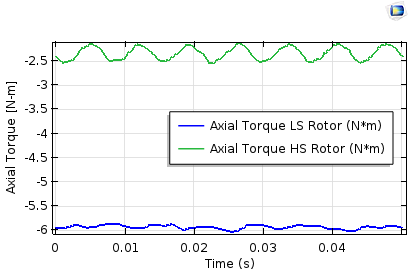
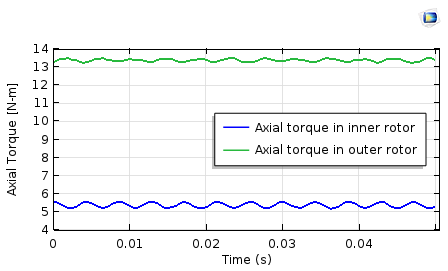
内外转子上的轴向扭矩曲线。左图:稳态研究和参数化扫描。右图:瞬态研究。高速转子上的扭矩波动较大(磁极对较少)。
直线磁齿轮
直线磁齿轮的运用相当广泛。例如,在油气行业,它们为钻井电机提供传动,将高速度转换成钻井所需的高扭矩。这类磁齿轮也可与直线同步机械结合使用,作为电动汽车的自由活塞发电机,同时产生交流发电用于交流能相关的各种应用。
典型的直线磁齿轮构造如下图所示。该齿轮由三个转子构成,其中两个为直线移动的电枢(也称作转子),其间为静止钢磁极。因为该几何在方位角方向上对称,所以我们可以利用二维轴对称几何求解。在此处展示的示例中,我们假设所有转子的长度相同,且在运动方向上无限长。该条件意味着我们只需模拟几何的一个扇区。
我们使用 COMSOL Multiphysics 中的磁场接口和移动网格接口建立模型。因为直线周期没有内置的周期性边界条件,我们就利用广义拉伸算子为低速电枢和高速电枢都创建一个定制的周期性边界条件。如要参考相关的示例,请阅读上一篇博客文章。
为计算高速电枢和低速电枢之间的电磁力耦合,我们使用时域仿真。您可以从“案例下载”中下载模型文件及其关联文档。


左图:直线磁齿轮的构造,展示了低速电枢、高速电枢和静止钢磁极。黑色箭头表示永磁体的磁化方向。右图:磁通密度模(表面图)和磁通密度的等值线图。还显示了径向分量。


高速电枢(左图)和低速电枢(右图)上电磁力的 z 分量。
上面的动画描绘了磁通密度模的表面图以及磁通密度径向分量的等值线图。另外还显示了高速电枢和低速电枢的直线运动,以及磁场的相互作用。
总结
在今天的博客文章中,我们展示了可利用 COMSOL Multiphysics 模拟的主要磁齿轮类型,以及 “AC/DC 模块”中可使用的接口。进一步,通过稳态研究和瞬态研究演示了转子间扭矩传递的对比。
对于同轴结构和轴向结构,您可以利用旋转机械,磁场接口直接设置模型。但对于直线磁齿轮,则需要耦合磁场接口和移动网格接口,并定制周期性条件。
关于在 COMSOL Multiphysics 中模拟磁齿轮的更多资源
在上一篇博客文章中,我们介绍了如何利用 COMSOL Multiphysics 中的旋转机械,磁接口模拟电动机和发电机这样的旋转机械。今天,我们将以三维发电机模型为例,演示模拟的大致步骤,并将结果与相似的二维模型作对比。还会重点阐述扇区对称和周期性边界条件的概念及使用案例。
模型示例:永磁交流发电机
正如前面介绍的,我们要阐述扇区对称的概念,因此将重点讨论永磁发电机教程中的一个扇区,此教程可以从“案例下载”中下载。在发电机堆栈长度为 0.4 米时,此二维示例可以扩展为三维。因为其几何关于转子轴旋转对称,所以只要求解其中的一部分就能得到完整三维几何的仿真结果。这意味着我们只要求解原始几何的 1/16。


左图:发电机的三维示意图,切下的那部分为转子、定子和定子绕组。右图:两个不同视图中的部分三维几何。


左图:二维交流发电机的横截面几何。右图:交流发电机的扇形几何。
模拟三维旋转机械的关键步骤
以上方讨论的三维扇形几何为例,我们将着重讨论模拟旋转机械的关键步骤。对于这个交流发电机示例,首先选择三维建模空间,随后选择旋转机械,磁接口,研究类型选择稳态。接着,定义参数,包括长度、扇区数、导线直径以及转速(转/分钟)。
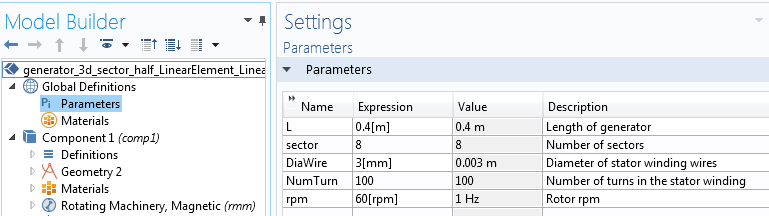
交流发电机仿真时包含的参数。
几何
旋转磁力机械由两个零件构成:定子和转子。因此,在模拟此类机械时,必须将几何切割成两部分。我们一般从这两个零件间的空气间隙处切割。这样就形成了两个表示不同区域的独立联合体。形成装配用于最终的几何定型,并在定义下自动创建一致对。在三维模型中,定子端部绕组的周围会添加空气域,以捕捉弥散场。(二维模型不会捕捉此单元。)

几何序列中转子域和定子域的联合体。
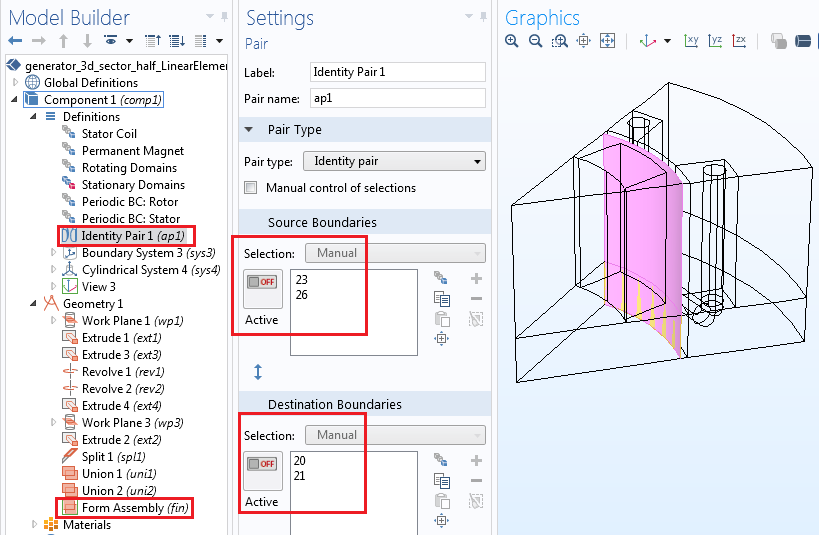
几何通过“形成装配”定型后,分离定子域和转子域的一致对设置。定义节点下可以选择不同的域和边界。
定义
在定义分支下,选择几何实体,如域或边界。这里我们可以选择以下几个几何实体:
- 定子线圈
- 永磁体
- 旋转域
- 稳态域
- 周期性边界条件:转子
- 周期性边界条件:定子
在物理场、网格剖分和后处理过程中,涉及定义模型组件时还会从上述几个几何实体中作选择。在同一分支下还可以定义物理场设置中使用的坐标系。
旋转机械,磁接口
旋转机械,磁接口利用两种方式(混合公式)求解 Maxwell 方程:磁矢势(MVP)和磁标势(MSP)。这两个公式还分别用在磁场和磁场,无电流接口中。
MSP 公式的自由度较少,因此在连续性或扇区对称等成对特征中涉及磁通密度时,可确保其耦合更加准确。因此,利用 MSP 求解一致对任一侧的空气域很重要。为此,可以使用旋转机械,磁接口中的磁通量守恒特征。

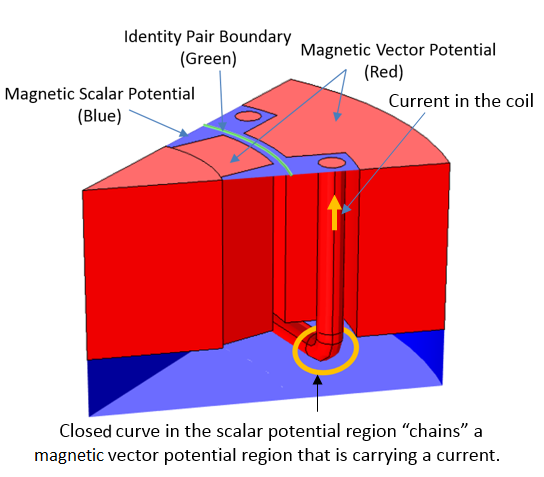
MSP 和 MVP 区域,以及一致对边界。
在左上图中,定子一侧的定子线圈、定子铁芯和空气域是用 MVP 模拟的。转子的转子铁芯、永磁体和空气域以及定子的一部分空气域是用 MSP 模拟的。通过这样的设置,就可以用安培定律特征模拟整个 MVP 区域。由于 MVP 公式允许存在带电域,因此可以针对感应涡流模拟定子铁芯区域并计算涡流损耗。但是,转子铁芯不能进行相同的模拟,因为它是用 MSP 公式模拟的,其中明确设定该区域没有电流。如果要计算定子和转子上的涡流损耗(或者如果转子中存在其他任何导电域),则还必须利用 MVP 求解这些区域,如右上图所示。
这两种配置中,MSP 区域都只是简单相连。换句话说,MSP 区域未包含“束缚”带电导体的闭合回路。下图显示了一个无效的拓扑示例,其中整个空气域都指派了 MSP。MSP 区域中的闭合曲线“束缚”了有电流通过的 MVP 区域(定子线圈)。这类拓扑问题应当避免。
MSP 区域并非简单相连的无效拓扑。
让我们从 MSP 开始:首先,添加第一个“磁通量守恒”特征,将其指派到转子侧的空气域以及定子侧中一致对旁的空气域。将本构关系设置为具有相对磁导率的线性材料,并引用材料节点中的材料空气。

利用 MSP 模拟空气域。
接着,添加另一个“磁通量守恒”特征,指派给转子铁芯。本构关系设置为磁导率有限(常数)的线性材料,或者利用 B-H 曲线选项将其改为非线性材料。B-H 曲线通常在材料节点下定义,例如图中的 Soft Iron (without losses)。另外,非线性饱和曲线可以通过外部材料 特征在外部定义,此特征位于全局定义下的材料节点中。

模拟转子中的线性或非线性磁性材料。
要模拟永磁体区域,可以使用“磁通量守恒”特征。本构关系设成剩余磁通密度或磁化。柱坐标系用于在径向指派磁化。

转子中永磁体的模拟。
要模拟定子线圈,可使用多匝线圈特征。设置线圈是为了测量绕组中的开路电压(电流为零)。在线圈长度倍增因子中指定适当的因子(本例为 16),便能获得线圈总长度,这个参数位于“多匝线圈”特征下的几何分析子节点中。下一步涉及指定定子线圈两端的“输入”和“输出”边界条件。

利用多匝线圈特征模拟定子线圈。还显示了“几何分析”子特征的设置以及“输入”和“输出”边界条件。
要模拟定子铁芯区域,向模型添加另一个“安培定律”特征。本构关系通过相对磁导率设置为磁导率有限的线性材料,或通过 H-B 曲线选项改为非线性磁性饱和曲线。与转子铁芯相似,“H-B 曲线”通常在材料节点下定义。不过,如果定子和转子的材料不同,则要在材料节点下添加两种不同的非线性材料。

“安培定律”应用到定子铁芯区域。线性材料和非线性材料的选项都已突出显示。
要获得更高的数值稳定性,可以将磁标势场度规修复特征应用到每一个矢势域。假定 MVP 区域完全包含在 MSP 区域中。或者说,度规已修复的域及其边界在几何之内,未触碰“磁绝缘”边界条件。在上述任一种情况中,度规修复都需要至少由一点来约束。为此,勾选此特征中高级设置栏的确保值上约束复选框。只有在模型开发器的显示按钮中启用了高级物理场接口选项栏之后,才能执行上述设置。此教程提供了更深入的探讨。
另外,数值收敛还要求电导率不得为零。举例来说,材料节点(空气和软铁)中电导率可以为 10 S/m,这时 MVP 用于求解域。
向不同的区域添加多个特征后,默认的“安培定律”现在仅适用于通过 MVP 求解的定子空气域。默认的“混合公式”边界条件自动在 MSP 和 MVP 区域之间的界面上施加适当的条件。


左图:默认“安培定律”的域选择。右图:默认“混合公式”边界条件的边界选择。
现在我们将周期性边界应用到几何分割成多个扇区产生的边界上。如果所有扇区完全相同,则选择连续性。如果扇区的几何相同,但相邻扇区的激励(即永磁体或电流)方向发生改变,则选择反周期性。后一种情况适用于交流发电机示例,因为相邻扇区的磁化是交变的。建议使用两种不同的周期性条件特征,定子和转子各使用一个,以确保能正确检测到周期性边界。


转子区域和定子区域使用了不同的周期性条件。
将扇区对称这个成对条件应用到转子和定子的连接对。在设置窗口中,指定扇区数和周期性的类型(与周期性条件中指定的类型一致)。在转子和定子重叠的区域,扇区对称与连续对特征的效果相似,同时将循环对称条件应用于非重叠区域。

反周期性条件的扇区对称设置。
要使求解器收敛,MSP 的解必须唯一。为此,向 MSP 区域中的某一点添加零磁标量势。如果恰好有两个不同的 MSP 区域(即,定子和转子各有一个),则必须向每个区域应用单点约束。

点约束的设置。
最后,利用指定旋转或指定旋转速度特征添加转子的旋转运动。前者可以指定旋转角,它是时间的函数。后者可以输入一个恒定的角速度,角度是时间的函数,并呈线性增加。

转子域绕 z-轴进行指定旋转。
网格剖分
只要模型中设置了周期性条件,那么源边界和目标边界上的网格必须完全相同。首先,将自由三角形网格或映射网格应用于源边界。然后,使用复制面特征将相同的网格复制到目标边界上。
此外,为精确映射一致对中从源边界到目标边界的场物理量,目标侧(旋转边界)的网格要比源侧(静态边界)更加细化。对各个曲面分别剖分网格有助于完全控制这些曲面。
尽可能地使用扫掠网格或映射 网格,这样可以大幅度减少网格单元的数量。先将自由三角形网格应用于“多匝线圈”特征的一端,然后将扫掠网格应用到整个线圈区域。类似地,扫掠网格也用于定子和转子之间的空气域。


左图:周期性条件下源边界和目标边界的“复制面”特征设置。右图:三维发电机扇形模型中使用的最终网格。
求解器设置
旋转机械,磁接口支持两类研究步骤:稳态和瞬态。对瞬态仿真而言,最关键的是初始值要与物理情况完全相符。举例来说,如果模型中有一块永磁体,则必须先求解稳态步骤,将解作为瞬态研究的初始值。
至于三维交流发电机扇区,我们按照三个步骤建立研究:
- 线圈几何分析:针对“多匝线圈”特征中使用的数值线圈类型计算线圈电流方向
- 稳态:计算转子的永磁体产生的静磁场
- 瞬态:对发电机进行瞬态仿真,上一步骤的解作为初始值
提升仿真性能
要提升仿真性能,可以对应用在模型中的有限元网格选择不同的离散阶次。MVP 和 MSP 默认的离散阶次都是二次。不过离散阶次设为线性会显著减少计算时间。
为修正离散阶次,先单击显示按钮,启用离散化。然后通过旋转机器,磁接口,将因变量 MVP 和 MSP 中的任一个或两个的离散阶次改为线性。
结果
求解后,可以使用二维扇形和三维扇形数据集查看该几何。要添加扇形数据集,右键单击结果节点下的数据集。如果模型为反周期性,则指定扇区数。接下来,勾选高级栏中旋转时的反相复选框。任何使用该数据集的绘图都会显示重建后的几何全貌。如果你的模型和本文示例一样,为镜面对称,则可以使用三维镜像数据集获取完整模型另一半的解。注意,“三维镜像”数据集可以添加在“三维扇形”数据集之前,也可以添加在之后。
利用变量 rmm.VCoil_1 可以直接计算定子线圈的感应电压,此变量位于一维绘图组下的全局绘图中。将此变量乘以扇区数(八),可以获得二维扇形模型中定子线圈的总感应电压。通过线圈长度倍增因子可以获得三维扇形模型中定子线圈的总感应电压。


左图:旋转时扇形模型的磁通密度(T)和磁场线。右图:利用“二维扇形”数据集重建的完整几何。红线用于区分各个不同的扇形几何。


左图:永磁体和铁芯中的磁通密度(体积和体箭头),以及扇形模型的定子线圈在 t = 0.01 s 时的电流密度(灰度标)。右图:利用“三维镜像”和“三维扇形”数据集重建的完整几何。


左图:二维扇形模型中使用非线性磁性材料和二次网格单元的感应定子线圈电压。右图:三维扇形模型中使用非线性磁性材料和线性网格单元的感应定子线圈电压。
后续操作
从 COMSOL Multiphysics 5.2 版本开始,可以使用 AC/DC 模块中的非线性磁性材料数据库中的非线性磁饱和曲线进行频域仿真。您可以使用新添加的有效非线性磁曲线计算器仿真 App 将关联的 B-H 或 H-B 曲线(以前仅支持稳态和瞬态研究)转换为有效的 B-H 或 H-B 曲线。这篇博客,我们将讨论如何在频域仿真中使用这个仿真 App。
频域中的非线性磁性材料
一个常见的建模假设是在本构关系中指定线性磁导率。假设材料对在初始建模阶段施加的场具有线性响应,通常是一种很好的做法。在 COMSOL Multiphysics 中,只需要在磁场接口的本构方程中应用一个磁导率常数值就可以实现这一点。
然而,许多铁磁材料表现出非线性关系,它们的磁化强度,即使是很小的变化,也非线性地取决于磁场。这些材料还表现出 滞回 特性,也就是外加磁场对磁化的历史依赖性。模拟滞回特性对计算要求很高,比较困难。就像之前的博客中所描述的,COMSOL Multiphysics 中提供的非线性磁性材料不包括完整的磁滞回线,而是在第一象限中纳入磁饱和效应的平均 B-H 曲线。
这些磁化曲线也称为直流 或常规磁化 曲线,它是通过在磁滞回路的尖端绘制 B 和 H 最大值的轨迹获得的。这些磁饱和曲线可以直接用于稳态和瞬态研究,但不能用于频域研究。为了在频域中求解,您需要一条“平均循环的”B-H/H-B 曲线,该曲线在特征频率处近似于非线性材料。
有效非线性磁曲线计算器仿真 App 可生成用于频域(时谐)仿真的有效 B-H/H-B 曲线。这些有效的 B-H/H-B 曲线可以直接在 COMSOL Multiphysics 5.2 版本中 AC/DC 模块的磁性接口中使用,该模块内置了对这些材料进行建模的功能。
注意:在 COMSOL Multiphysics 中,可以通过添加额外的偏微分方程 (PDE) 来描述材料模型以建立完整的磁滞回线;例如,时域中的 Jiles-Atherton 模型。COMSOL 案例下载页面提供了一个演示 Jiles-Atherton 矢量滞回建模的 3D 时域模型。此外,COMSOL Multiphysics 5.2 版本中的 AC/DC 磁接口支持外部 C 代码中定义的材料模型,这支持仿真App创建者允许用户定义子例程来描述材料模型;例如,通过建立完整的磁滞回线并在完整3D 几何结构的磁性仿真中使用这些材料模型。您可以在调用由外部函数定义 HB/BH 曲线的材料教程模型中查看演示 C 代码材料模型的示例。
编者注:我们在 2016/3/10 发表了一篇建立用于磁仿真的外部材料模型的博客文章。您可以通过阅读这篇博客“模拟磁性仿真时访问外部材料模型”了解更多信息。
探索有效非线性磁性曲线计算器仿真 App
COMSOL Multiphysics 5.2 版本的 AC/DC 模块中的磁性接口现在支持有效的 H-B/B-H 曲线材料模型,该模型可以在频域仿真中近似计算非线性磁性材料的特性,而不需要对完整的瞬态仿真进行计算,从而减少了额外的计算成本。为了能够使用这种新的有效 H-B/B-H 曲线材料模型,我们需要一个定义为插值函数的有效 Heff(B) 或 Beff(H) 关系。
这个实用的 App 工具可用于从材料的 H(B) 或 B(H) 关系开始计算插值数据。H(B) 或 B(H) 关系的插值数据可以从文本文件导入或输入到表格中。这个仿真 App 可以使用两种不同的能量方法:简单能量法 和平均能量法,计算 Heff(B) 或 Beff(H) 关系的插值数据。使用 AC/DC 模块时,有效 H-B/B-H 曲线的输出结果图可以被导出为文本文件或材料库文件,这些文件可以导入到 COMSOL Multiphysics 中,用于磁性材料的频域仿真。
用户界面
用户界面由四个不同的部分组成:功能区、材料信息(输入和结果)、曲线图 和曲线分析,如下图所示。磁通密度(B)和磁化场(H)的材料数据可以直接在表格中输入,也可以使用菜单上的导入曲线数据 按钮从文本文件中导入。

有效非线性磁曲线计算器仿真 App 的用户界面。
功能区 部分包含用于不同操作的六个按钮。单击使用默认曲线数据 按钮来使用应用程序中已经加载的默认输入 B-H 曲线。如果要使用自己的曲线,请单击导入曲线数据按钮来打开导入曲线 对话框(如下图所示),然后导入 用于 B-H 或 H-B 曲线的包含插值数据的文本文件。在导入曲线 对话框中,通过单击浏览 按钮指定要导入的文件。
导入的文本文件必须包含由空格字符或逗号分隔的值对,每行一对。从导入曲线 作为组合框中选择B-H 曲线 或H-B 曲线。对于 B-H 曲线,第一列表示 H 值,第二列表示 B 值,反之亦然。默认数据表将替换为导入的数据,如果需要,可以在表中对它进行编辑。可以使用表格下方的按钮添加或删除行。
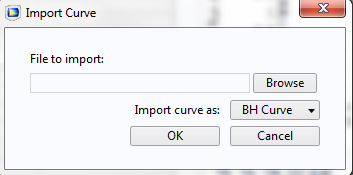
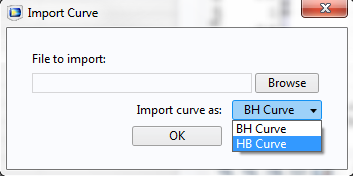
功能区部分中的 导入曲线数据按钮对话框。
在曲线分析 部分中,每次修改或从文件导入数据时,都会自动分析曲线数据。曲线分析包括三个条件,导入的数据必须满足这些条件:曲线必须包含值(0,0);曲线必须是严格单调的;曲线必须是非负的。如果不满足这些条件中的任何一个,请修改表中的值来纠正这个问题。零场处的线性化渗透率(H = 0 处的曲线斜率)也会被计算并显示。
修改或导入数据后,单击功能区中的计算 按钮,使用简单能量和平均能量方法计算有效曲线。简单能量和平均能量方法的有效 B 场的计算值显示在表的最后两列。这两种方法的原始 B-H 和 H-B 曲线以及 Heff(B) 和 Beff(H) 曲线的绘图都会显示在图形窗口中,如下图所示。

仿真 App 的用户界面,显示计算的数据和磁曲线图。
为有效 H-B/B-H 曲线计算的插值数据可以被导出,进一步用于其他 COMSOL Multiphysics 应用。单击功能区中的导出数据 按钮来打开导出材料数据 对话框。您可以将数据导出为文本文件,也可以通过在导出 选项中选择相应的选项导出到材料库。
在文本文件 导出选项中,可以选择任何一种平均方法和曲线类型。这个导出的文本文件在每行中包含一对值。例如,可以将这个文本文件导入到 COMSOL Multiphysics 应用程序的插值函数 节点中,并用来定义频域磁仿真的有效 H-B/B-H 曲线。
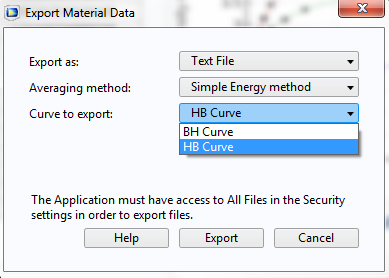
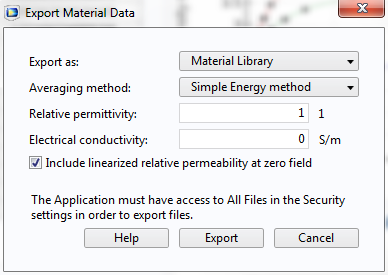
导出材料数据对话框,说明了文本文件(左)和材料库(右)数据导出选项。
您还可以使用导出为 组合框中的材料库 导出选项将曲线数据导出作 为 COMSOL Multiphysics 材料库中的文件(请见上图右侧)。这个导出的材料库文件中的材料包含基于所选的平均方法(简单能量或平均能量)的 H-B 曲线、B-H 曲线、有效 H-B 曲线和有效 B-H 曲线。还可以通过选中在零场时包含线性化相对磁导率 复选框来包括线性化相对磁导率。导出的材料库文件可以被添加到材料库中,如下图所示。

材料浏览器窗口,显示将导出的材料库文件添加到材料库的步骤。
注: 现在,您可以使用 COMSOL Multiphysics 材料库中非线性磁性文件夹下的任何材料进行频域仿真,方法是首先使用这个实用的仿真App将可用的 H-B/B-H 曲线转换为有效的 H-B/B-H 曲线。只需在 COMSOL Multiphysics 模型中添加材料,将 B-H 曲线或 H-B 曲线数据导出为文本文件,然后将文本文件导入有效非线性磁曲线计算器仿真App,评估并导出有效 H-B/B-H 曲线,最后将有效 H-B/B-H 曲线导入到同一个 COMSOL Multiphysics 模型中,用于频域仿真。AC/DC 文件夹下的软铁(有损耗)和软铁(无损耗)材料已经包括有效 H-B/B-H 曲线,可以直接用于频域仿真。
嵌入模型
这个仿真 App 中的嵌入模型使用简单能量和平均能量方法计算材料的有效非线性磁曲线。计算有效磁通密度强度的积分表达式如下。这个仿真 App 中可用的积分方法是基于 Gerhard Paoli,Oszkár Biró 和 Gerhard Buchgraber 论文中的方法选择的:
B(H)dH\right)dt
其中,H 是时谐磁场的振幅,B(H) 是材料的非线性 B-H 关系,H(t) 是随时间变化的振荡磁场,T 是任意振荡周期。
有关这个模型的详细信息,请单击这个仿真 App 功能区中的文档 按钮参考随附的 PDF 文档。
使用有效 H-B/B-H 曲线
为了在 COMSOL Multiphysics 5.2 版本中说明这个新的有效 H-B/B-H 曲线材料模型,让我们来看一下由单臂上的多圈线圈激励的方形闭合磁芯,如下右图所示。在磁场 物理场接口中通过安培定律模拟磁芯,使用三种不同的材料类型:非线性 H-B 曲线、非线性有效 H-B 曲线和线性材料。
第一个非线性H-B曲线模型在时域中求解,而其他两个材料模型在 1 kHz 频域中求解。我们测量并比较了所有三种不同材料模型的磁芯内部一个角的磁通密度,请参看下图右。正如预期的那样,有效 H-B/B-H 曲线模型在时域中的结果更接近非线性 H-B/B-H 曲线模型。然而,与其他两个模型不同,时域模型仍然表现出更高的谐波。与其他两个模型相比,线性材料模型有很大不同。因此,对于许多高次谐波并不重要的应用,有效 H-B/B-H 曲线可能是合适的,因为它们的计算成本较低。您可以下载有效 H-B/B-H 曲线验证模型案例查看。

磁芯的磁通密度模表面图(左)。三种材料模型的磁芯内部点的磁通密度模的比较(右)。
结束语
在这篇博客中,我们讨论了可用于模拟非线性磁性材料的各种材料模型。我们还详细介绍了有效非线性磁曲线计算器仿真App,并解释了如何利用这个 App 生成循环平均有效 H-B/B-H 曲线,用于磁性设备的频域仿真。最后,我们使用三种不同类型的材料模型(B-H/H-B 曲线、有效 H-B/B-H 曲线和线性材料)演示了一个示例,并对结果进行了比较。
如果您对用于时谐或瞬态研究的非线性磁性材料进行建模有兴趣,欢迎联系我们。
参考文献
- Gerhard Paoli, Oszkár Biró, and Gerhard Buchgraber. “Complex representation in nonlinear time harmonic eddy current problems,” Magnetics, IEEE Transactions, vol. 34.5, pp. 2625-2628, 1998.
自己动手尝试
- 尝试新的有效非线性磁曲线计算器仿真App
- 下载包括线性和非线性材料示例的有效 H-B/B-H 曲线验证模型
- 阅读相关博客文章:“模拟磁性仿真时访问外部材料模型”
“AC/DC 模块”中的旋转机械,磁场物理场接口可用于模拟旋转机械,如电动机或发电机。利用磁场和移动网格这两个物理场接口模拟直线设备或管式设备时,定制的线性周期性边界条件是非常适合的。在本篇博客文章中,我们将探索如何定制线性周期性边界条件,并模拟用于波浪能的管式发电机。
直线电机或发电机
直线电机 (LEM) 是一种能进行直线运动的机电设备,无须使用任何机构它就能将旋转运动转换为直线运动。直线电机和旋转电机相似,定子和转子沿径向平面被切割并展开以提供线性推力。相同的电磁力在旋转电机中产生扭矩,在直线电机中则产生直接的线性力。
值得一提的是,“AC/DC 模块”中的旋转机械,磁场接口包含模拟旋转机器所需的所有功能部件。该接口结合了磁场接口;磁场,无电流接口和移动网格接口。经定制后此接口适用于模拟旋转机器,由此极大地简化了静态域和旋转域的定义,以及两者之间接口的处理。在模拟模型的扇形区域或某一部分以获得完整设备的仿真结果时,扇区对称和周期性边界条件这样的功能部件也极其有用。尽管该接口显著减少了建立旋转运动模型所需的工作,但直线运动中不能使用该接口。
下面,我们将演示如何对磁场和移动网格这两个物理场接口定制耦合来模拟管式发电机。另外,还会解释如何创建线性周期性边界条件,这是利用广义拉伸算子模拟直线/管式电机或发电机的一个重要元素。
用于波浪能转换系统的管式发电机
管式电机在许多应用中受到青睐,从车辆的主动悬架系统到潮汐能和波浪能转换系统都有涉及。管式电机的传输效率比传统的直线和旋转转换系统高出许多,因为推力直接作用于负载。管式电机的另一个优势是,没有定子端部绕组。因此,铜损相对较少,永磁材料的利用率很高。
下面,我们将讨论对管式发电机进行模拟的技巧(如下图所示)。管式发电机包含两个主要零件:一个静态定子和一个作直线移动的滑块。定子由三相绕组和一个非线性磁芯构成。滑块由轴、永磁体及永磁体之间的非线性磁性材料构成。


左图:管式发电机的三维视图。右图:管式发电机的二维轴对称视图。该视图详细展示了线圈、永磁体及非线性磁性材料的分布。
使用 COMSOL Multiphysics 模拟管式发电机
利用磁场和移动网格物理场接口,我们可以在 COMSOL Multiphysics 中模拟上方描述的管式发电机。该模型绕机器轴对称,因此在二维轴对称域建立模型。几何已完全参数化,因此如果需要,该模型可用于优化研究或参数化扫描研究。参数已定义在全局定义>参数下,如下方屏幕截图所示。可以从案例下载中下载这里描述的管式发电机示例。
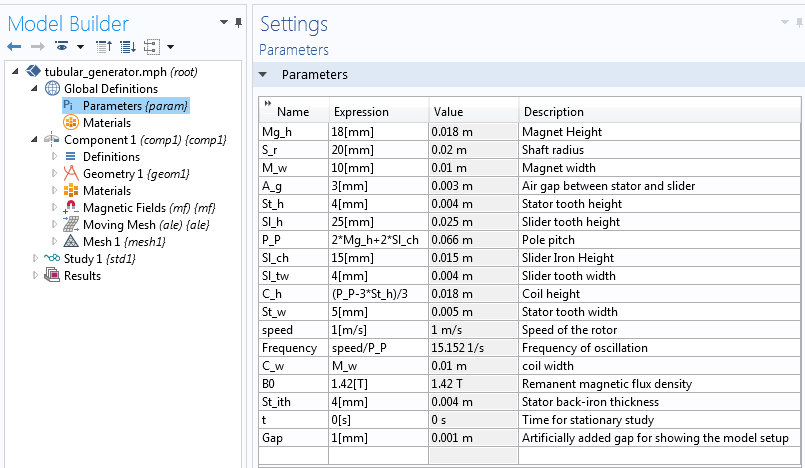
建立管式发电机模型所用的参数列表。
该模型几何旨在将定子零件和滑块零件创建为独立的几何体。随后这两个零件通过形成装配组装完成,由此在该接口中,定子和滑块间自动创建了一致对。同时添加移动网格,以模拟滑块的运动。
注:这里,我们在定子和滑块间添加了 1 毫米的额外间隙。由此重叠边界清晰可见,以应用定制的线性周期性边界条件。这条间隙纯粹为增强可视化效果而建,不会对结果(即电压输出或电磁力)产生任何影响。
物理场 I:磁场
磁场接口用于模拟管式发电机的电磁场。定子和滑块中的非线性材料使用“安培定律”节点进行模拟,同时“本构关系”设置为“H-B 曲线”。
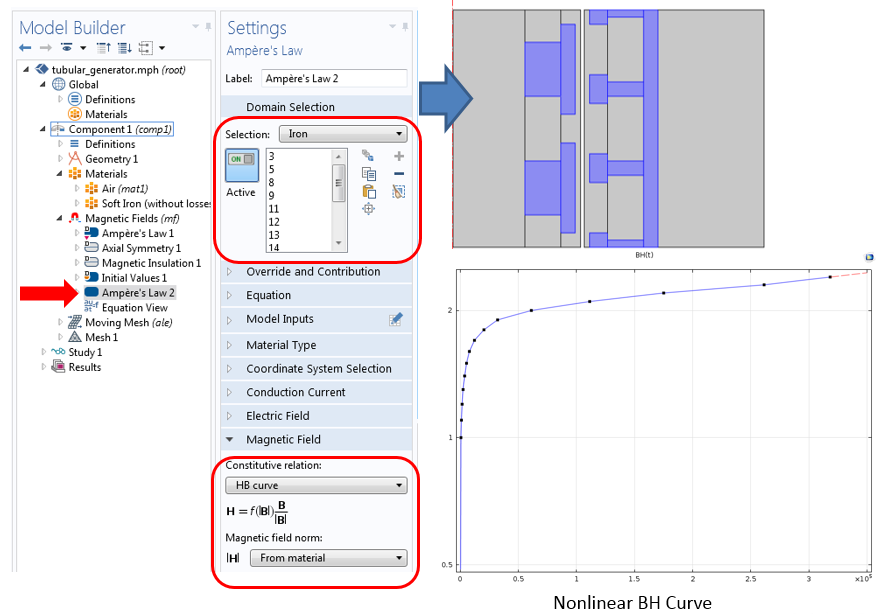
设置“安培定律”节点,描绘非线性磁性区域 “H-B 曲线”的实现。
三相绕组使用磁场接口中的多匝线圈功能部件进行模拟。三个相位的设置都相同。下方仅显示第三相的设置。每个相位的绕组包含 100 匝金属线,截面积为 1e-6[m^2],电导率为 6e7 s/m。三个相位都设为开路(即零电流),以计算线圈中的感应电压。
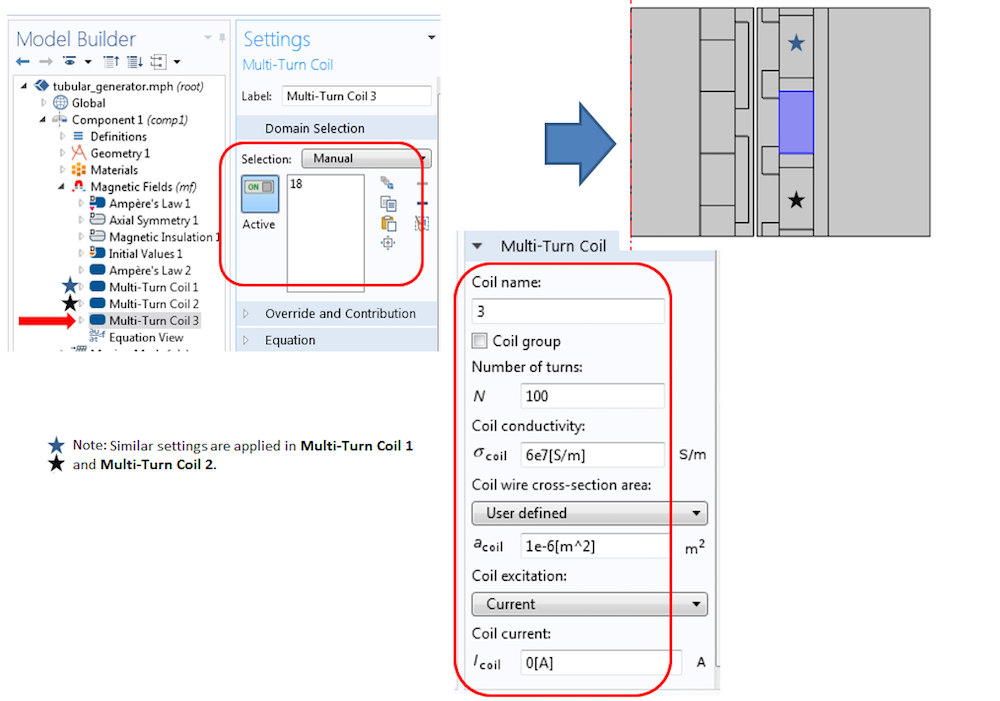
“多匝线圈”功能部件显示开路设置,以及匝数、电导率和横截面积。
滑块中的永磁体使用“安培定律”节点模拟,“本构关系”设为“剩余磁通密度”。添加了两个独立节点,一个表示磁体指向上方,一个表示磁体指向下方。下图仅描述磁体指向下方的设置。
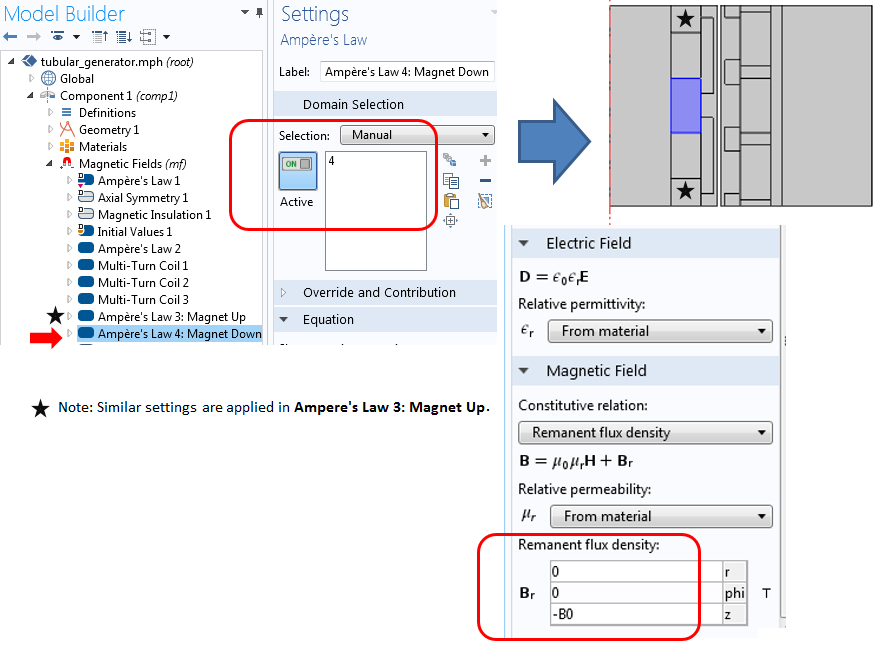
模拟永磁体的“安培定律”节点设置。
因为我们要求解的仅是管式发电机的一部分,所以必须在定子侧和滑块侧中的任一侧应用适当的周期性边界条件。在这里,适当的周期性条件指的是连续性条件。
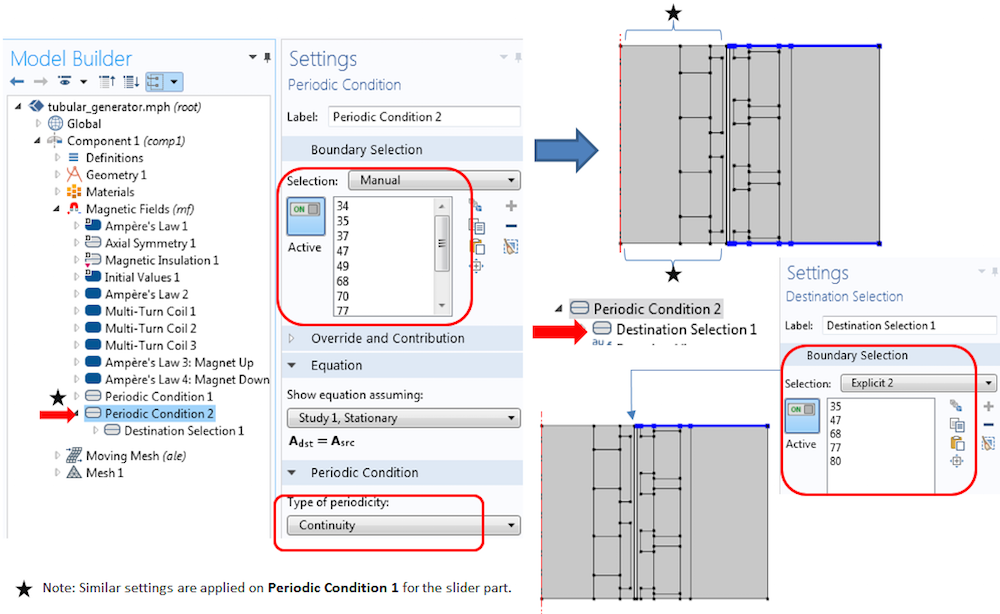
定子侧的连续周期性边界条件设置。相似的设置也适用于滑块侧。
定制线性周期性边界条件
旋转机械,磁场接口已包含扇区对称功能部件。使用此功能部件时,仅需模拟旋转机器的一个扇区就能获得整个设备的仿真结果。注意,“扇区对称”功能部件仅适用于旋转机器,不可用于作直线运动的电机或发电机。
要构建如上定制的线性周期性边界条件,需要再执行几个步骤。首先,必须创建角频率与发电机相同的锯齿波波形。在组件 1 > 定义 > 波形 1 下创建。下方屏幕截图显示锯齿波波形的其他设置。
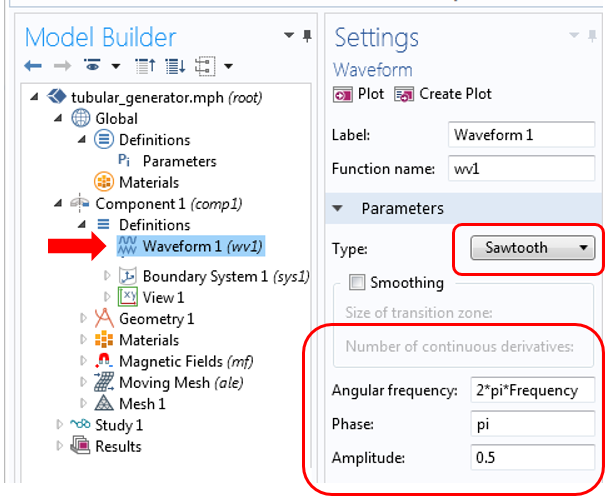
模拟发电机角频率时的锯齿波波形设置。
上方添加的锯齿波波形用于创建和锯齿波波形相似的解析函数,但偏移量大小为 0.5。解析函数添加在组件 1 > 定义 > 解析 1 下。
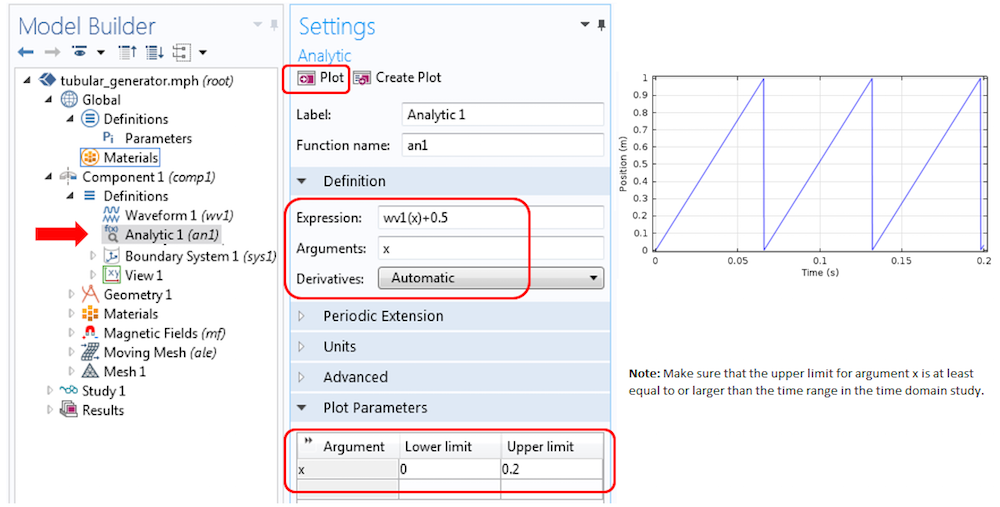
解析波形的设置和所得的波形绘图。
在一致对(定子和滑块间常见的一种边界)处,应当对因变量(矢量势,Az)添加连续性。因为定子是静止的而滑块按一定频率运动,所以需要定制此连续性条件以反映定子和滑块的线性周期。为此,使用“广义拉伸”算子映射定子到滑块的物理场。
定子边界 33 用作“广义拉伸”算子的源边界。其他设置如下所示。
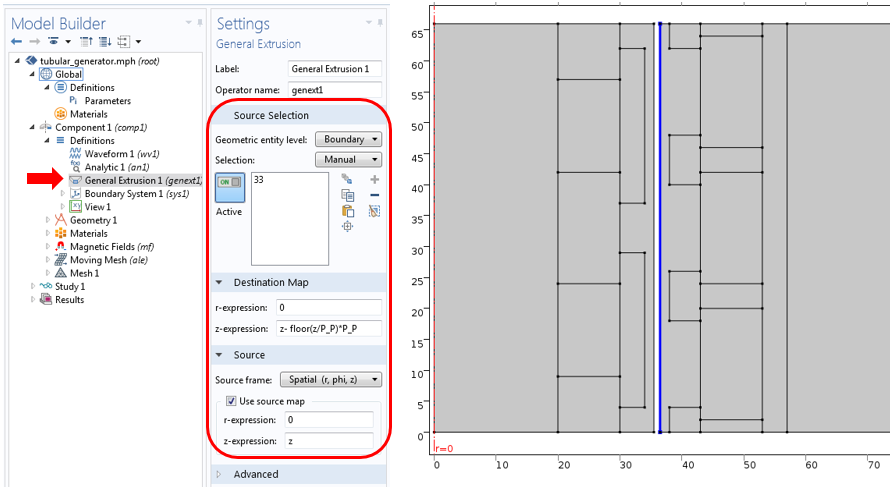
定子边界上定义的“广义拉伸”算子的设置。仅映射了 z-表达式的数据。
下面准备在常见边界上应用周期性连续性边界条件。为此,需要映射定子边界到滑块边界的矢量势。在边界 32 上添加“磁势”边界条件。
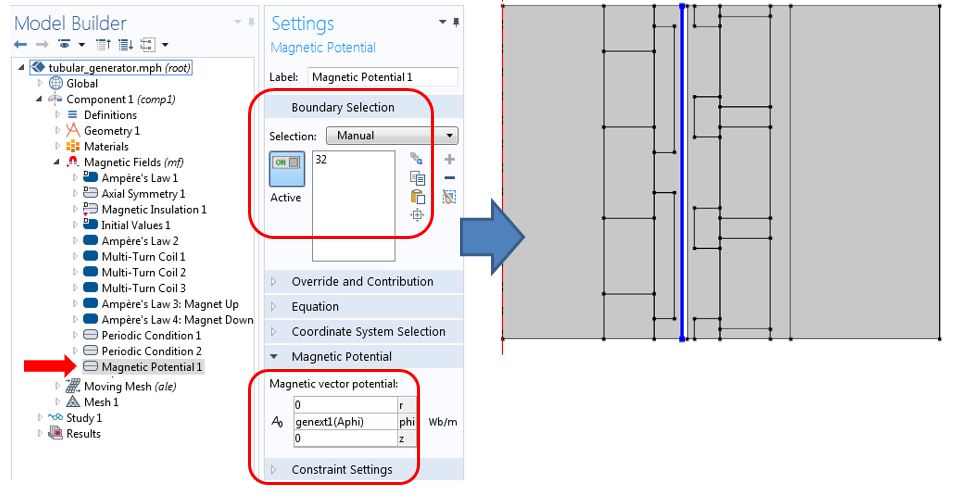
使用“广义拉伸”算子映射定子边界到滑块边界的矢量势。
为完成电磁场建模,需要在定子边界上添加“完美磁导体”边界条件。它表示电流的镜像对称平面。“完美磁导体”边界条件使磁场垂直于边界,并使边界上没有切向分量。
有兴趣学习“完美磁导体”边界条件以及磁场接口中其他相关边界条件的更多内容吗?请查看我们的博客文章“利用对称简化磁场模拟”。
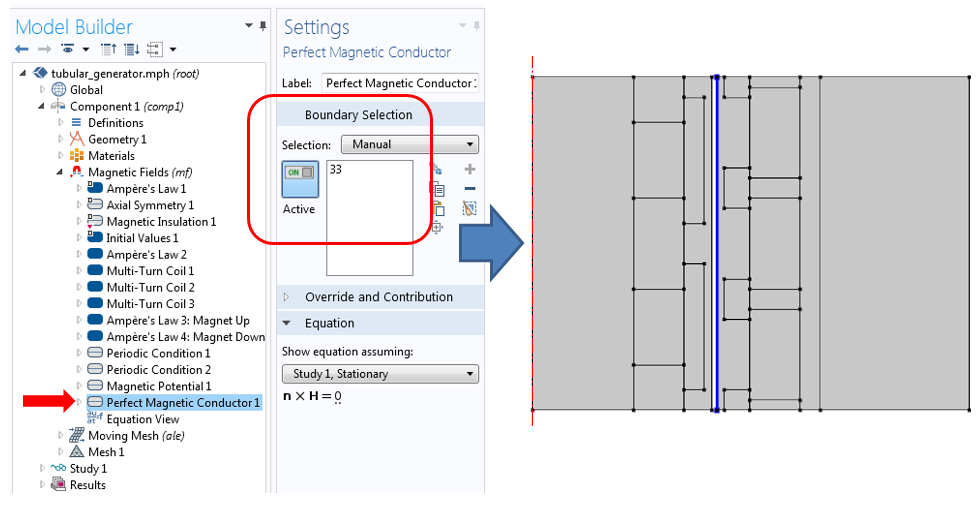
定子边界上“完美磁导体”边界条件的设置。
注:要模拟任何直线机器(即直线感应电机/发电机或同步电机/发电机),可以使用本文讨论的相同技巧来定制连续性边界条件,以施加线性周期性。尽管该方法同样适用于二维和三维轴对称几何,但对三维几何来说更复杂一些。在本篇博客文章中,我们不讨论定制的三维线性周期性边界条件。
物理场 II:移动网格
为模拟直线运动,先要添加移动网格接口。对定子域(及该侧的空气域)指派一个固定网格。同时使用 z-向的指定变形以及上一个解析函数定义的指定运动来模拟滑块部位。
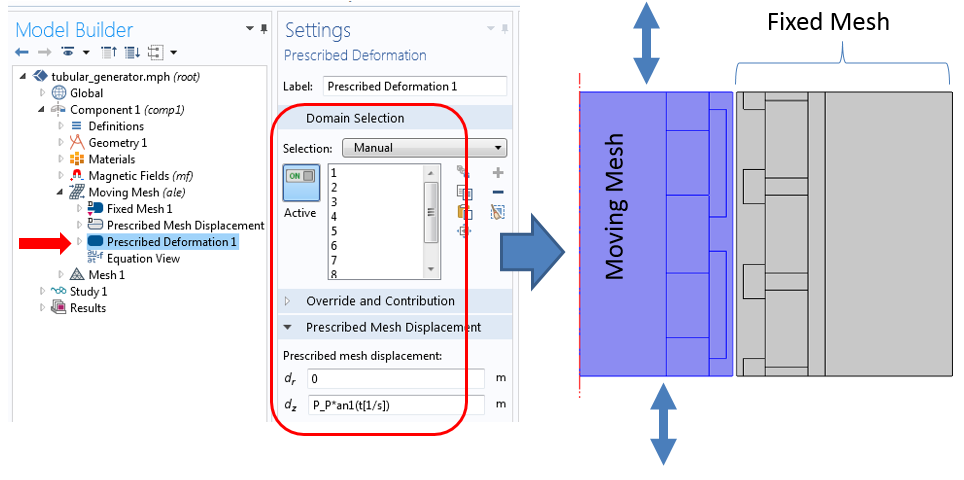
模拟管式发电机时使用的移动网格物理场接口及其关联功能部件设置。
网格剖分:在应用周期性边界条件的边上,源边和目标边所含网格数应当相同。为此,需要应用复制边功能部件。另外,对已设置了手动连续性边界条件的边界,“广义拉伸”算子可对其应用较细化的网格。
求解器设置和仿真结果
要设置正确的求解器以获得仿真结果,需要注意以下几点。首先,添加“稳态”研究步骤,以计算静态永磁体内部和周围的矢量势场。此静态解用作初始条件后,接下来求解“瞬态”研究步骤。这一步计算由作直线移动的滑块和三相线圈中的感应电压而产生的瞬态响应。因为该问题已在时域中求解,且模型中包含了非线性磁性材料,因此必须对非线性瞬态求解器作微调。非线性求解器的设置与这一技术支持知识库条目中建议的设置相似。
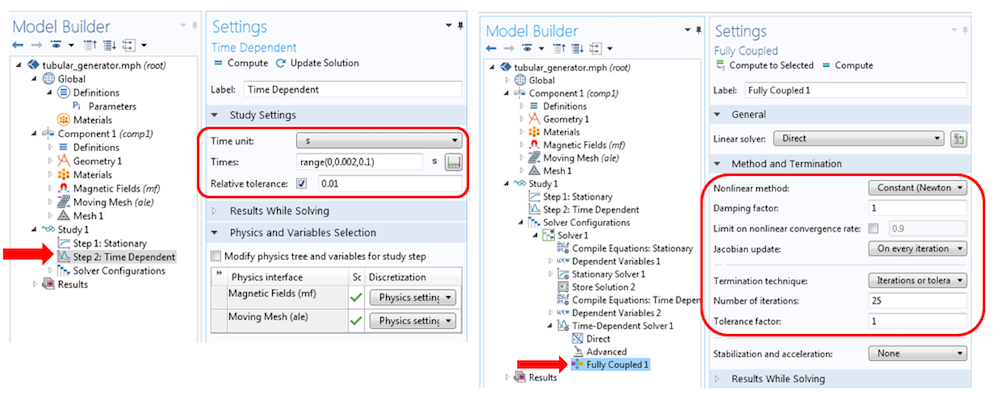
管式发电机的非线性求解器设置。该模型求解用时 0.1 s。


左图:t=0.03 s 时磁通密度的二维轴对称表面和面上箭头图。右图:t=0.1 s 时旋转三维几何上的磁通密度表面图。
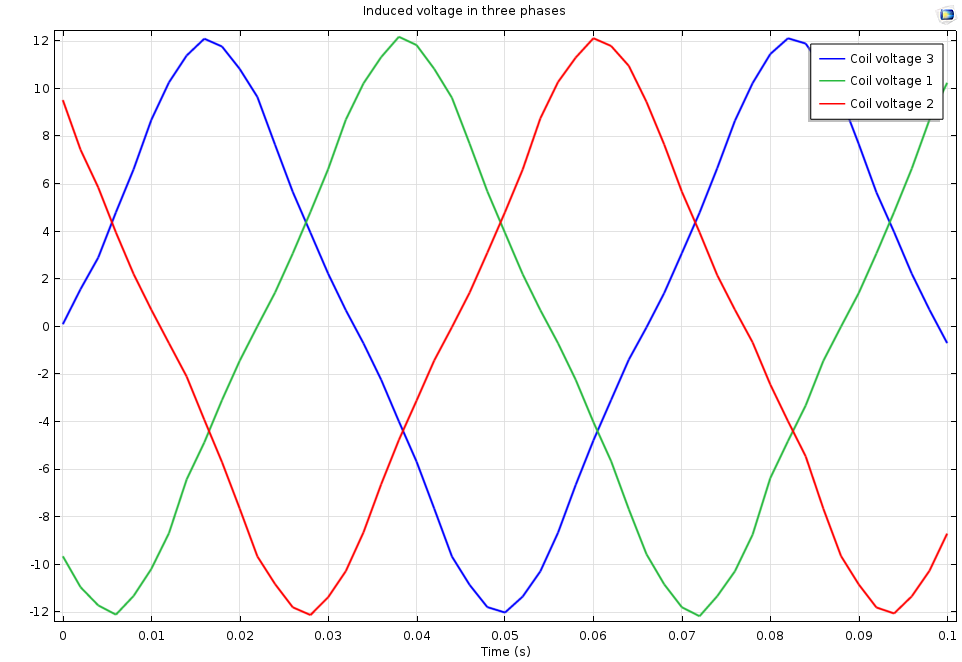
三相定子多匝绕组中开路感应电压随时间变化的图。
结束语
现有的旋转机械,磁场接口能求解对旋转机器的模拟。但在模拟直线电机或管式电机时,磁场和移动网格这两个物理场接口更适合。
今天,我们已经演示了如何使用“广义拉伸”算子定制线性周期性边界条件,以及如何模拟用于波浪能发电的管式发电机。上面展示的技巧同样适用于模拟各种直线电机。
自己动手尝试
- 下载教程模型:管式永磁发电机
磁悬浮轴承广泛用在各种工业应用中,比如发电、石油提炼、涡轮机械、泵机和飞轮储能系统。和机械轴承不同的是,这类轴承是利用磁悬浮而非物理接触来支承移动载荷的。由于磁悬浮轴承运行时不产生摩擦且无需润滑,维护费用也低,因此正逐渐取代机械轴承,更何况这种轴承的使用寿命还更长。现在我们一起来了解如何使用 COMSOL Multiphysics® 软件计算磁力、扭矩和磁刚度等设计参数。
磁悬浮轴承的类型
根据工作方式的不同,磁悬浮轴承 可以分为两种类型:有源磁轴承(AMB)或无源磁轴承(PMB)。有源磁轴承依靠铁磁材料和电磁体(线圈和铁芯)之间的吸引力起作用。无源磁轴承依靠永磁体(PM)之间和/或传导面与永磁体之间的排斥力起作用。
有源磁轴承
有源磁轴承 由一个静止零件定子 和一个旋转零件转子 构成,定子包含电磁体和位置传感器,转子围绕轴旋转。在正常工作条件下,最理想的情况是,转子位于中心,与定子相隔一定的间隙,且间隙长度相等。不过,在遇到干扰时,转子的位置会受控于一个闭环反馈系统。传感器测量出转子的位置发生变化,随后将之传送到数字控制器。数字控制器处理好数据后,将信号传送给功率放大器。后者重新调整电磁体的电流,推动转子回到原来的位置。为了重新调整转子,设计人员必须要知道转子处于不同偏移位置时的磁力以及相应的电流,这一点很重要。
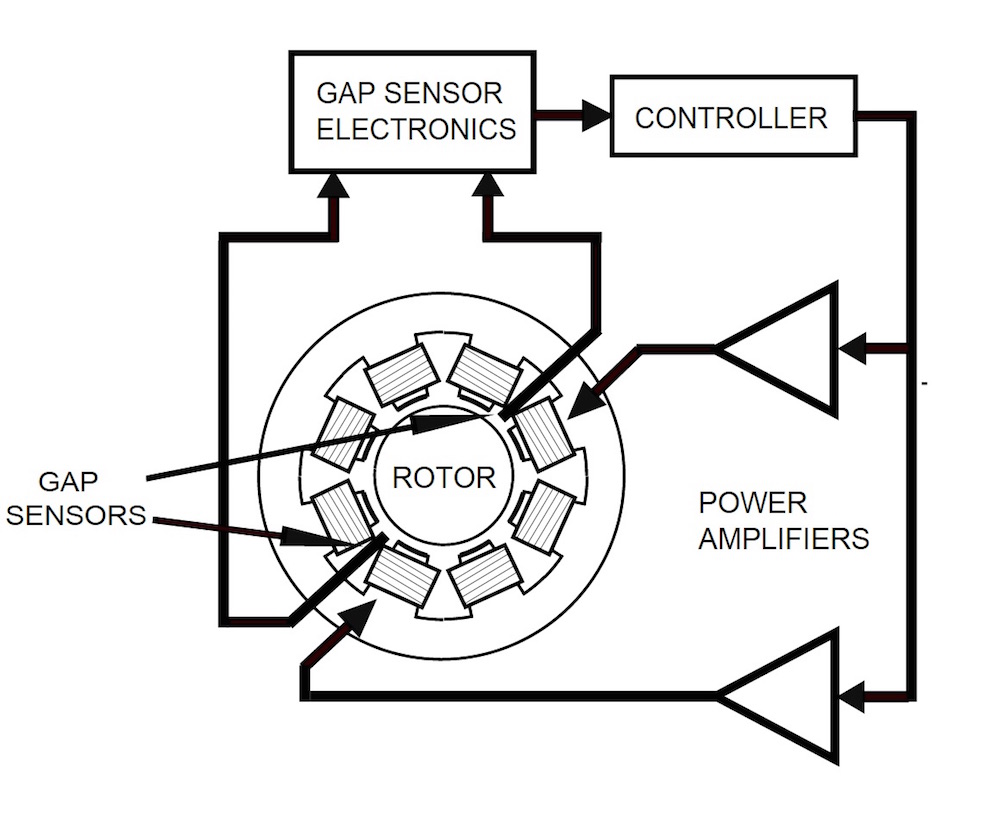
有源磁轴承组件的示意图。图片属于公有领域,通过 Wikimedia Commons 共享。
有源磁轴承的优点是能主动控制转子的位置,但与此同时,这也造成电子电路功耗较大,运行成本较高。当然,我们可以通过优化电磁体的设计,降低运行所需的功率,从而减少运行成本。COMSOL Multiphysics 便是这一优化过程中可以使用的有用工具。
在模拟包括定子和转子在内的有源磁轴承时,最佳途径是使用“AC/DC 模块”中的旋转机械,磁 接口。这个模拟过程与发电机或电动机的模拟非常相似,请查阅我们的二维发电机教程。要获取通用指南,请参考上一篇博客如何模拟三维旋转机械。
使用磁场 接口可以模拟永磁体和导电线圈(单匝或多匝线圈)。但是由于存在旋转,所以无法模拟感应电流。如果感应电流可以忽略不计,那么模型就可以建立在稳态域或频域,并对转子的各个位置添加参数化扫描研究,从而计算磁力或扭矩。
无源磁轴承
无源磁轴承 使用永磁体,不需要传感器和控制电路或输入功率。永磁体上两个磁极之间的磁斥力使空气间隙的长度保持不变,如永久磁轴承所示,或者依靠永磁体与旋转导电盘或轴之间的电动悬浮(EDS)也可以使这个长度保持不变,如电动轴承所示。 使用永磁体的无源磁轴承的几何与仿真结果显示如下。


左图:使用永磁体的轴向磁悬浮轴承的几何。黑色箭头表示永磁体的磁化方向。右图:显示磁通密度(箭头图)的结果图以及磁通密度模的曲面图。
电动轴承
当导电的转子在永磁体产生的磁场中旋转时,这个转子上会感应出涡流。这些涡流反过来会形成一个与永磁体产生的磁场方向相反的磁场,从而在旋转的转子导体与静态永磁体之间产生排斥力。转子的位移一直在这一磁斥力的作用下保持不变。因此,转子在中心旋转时,间隙的长度不变。
电动轴承可进一步分为径向电动轴承和轴向电动轴承。磁通量与转子轴平行时为径向电动轴承,磁通量与转子轴垂直时为轴向电动轴承。
径向电动轴承
径向电动轴承 由一个固定在旋转轴上的导电圆柱体构成。永磁体零件堆叠在铁环之间,定子和转子间的空气间隙中会产生沿半径方向(与轴线垂直)的朝内或朝外的磁通量。电动轴承教程是使用磁场和电场 接口求解的,可从“案例下载”中下载。还计算了不同偏移位置上的磁力。

左图:径向电动轴承的三维几何。右图:显示有定子(铁芯和磁体)的磁通密度(x 轴偏移位置为 1.5 毫米时)以及导电转子中涡流(灰度标)的径向电动轴承。
轴向电动轴承
轴向电动轴承的截面剖视图配置如下所示。导电盘贴着转子,磁性材料(轭铁)用于引导永磁体的磁场,从而使磁通线平行于转子轴。这就是术语轴向电动轴承 的由来。
在这个设计中,空气间隙相对较小,磁通路径十分高效。相关的完整教程可以从“案例下载”中下载。


左图:轴向电动轴承的截面剖视图。右图:显示有定子磁通密度和导电转子涡流的轴向电动轴承。还显示了箭头图。
上述两个电动轴承示例在 COMSOL Multiphysics 中都是用磁场和电场 接口模拟的。在这两个示例中,速度(洛伦兹项) 特征都用于指定旋转速度。使用这个方法后,就无需利用移动网格 接口考虑转子的旋转了。
请注意,只有当移动域不包含随材料一起移动的指定磁源,如线圈或永磁体(固定或感应的)时,才可以使用“速度(洛伦兹项)”特征。移动域的运动方向必须保持不变。比如,“速度(洛伦兹项)”特征可以用于模拟导电的(非磁性的)均匀旋转盘。相关的例子有电磁制动器、电动轴承、单极发电机、无限均匀移动平面上的磁体(如磁铁在铜管中下落或磁悬浮列车)以及流经磁体的均匀导电流体的流动(如液态金属泵或霍尔发生器/霍尔推进器)。
注:洛伦兹项准确地描述了移动域中由稳态磁源引起的感应现象,前提是移动域(包括其材料属性)不会随运动方向而变化。此外,感应现象可能是由于稳态源的强度或不断改变的速度的短暂变化引起的。洛伦兹项不会考虑到此类短暂变化带来的影响。
磁力/扭矩
COMSOL Multiphysics 中有两种方法可用于计算电磁力和扭矩。最常见的方法是 Maxwell 应力张量 法,常用于以下接口中的计算力 特征:磁场 接口;磁场,无电流 接口;磁场和电场 接口;以及旋转机械,磁接口。
举例来说,添加了计算力 特征后,就可以在磁场接口中使用磁力的空间分量 (mf.Forcex_0, mf.Forcey_0, mf.Forcez_0) 和轴向扭矩 ( mf.Tax_0) 进行后处理。计算力 特征只对 Maxwell 应力进行积分,仅计算选定的一个域(或多个域)外侧以及可选择域的整个外部边界上的应力,这几个域应当是一起移动的一组域(一个机械体)。因为这种方法基于表面积分,所以计算的力易受网格大小的影响。使用这种方法时,往往需要执行网格细化研究,才能使计算得到的力或扭矩正确。
如果应用了“计算力”特征的域与外部边界、周期性边界和一致对相接触,则“计算力”得到的结果可能不正确。而且,要计算附加在铁磁表面的磁体的力,接触边界上必须指派一个薄低磁导率间隙(在静电边界则指派薄低介电常数间隙),因为要计算的是空气中的 Maxwell 应力,而不是铁磁(电介质)材料中的 Maxwell 应力。
第二种方法是洛伦兹力法,仅适用于计算非磁性导电域中的磁力这种特殊情况。洛伦兹力定义为 F = J × B,其中 J 表示电流密度,B 表示磁通密度。洛伦兹力能十分准确地计算导电域中的力,因为其计算依据的是体积而非边界。因此,尽可能优先使用洛伦兹力法,而非 Maxwell 应力张量法。
除了以上提到的内置方法之外,还可以使用虚功法或虚位移原理计算磁力和扭矩。在这一技巧中,力的计算也就是研究少量位移对电磁能的影响。在 COMSOL Multiphysics 中通过使用针对变形网格和灵敏度分析的特征,可以实现虚功法。
磁刚度
在固体力学中,刚度表示一个物体的硬度,即物体在受力时抵抗变形的程度。在磁悬浮轴承应用中,这个参数相应地定义为磁刚度,它是总磁力相对于位置的负导数。如果磁力为 ,那么磁刚度相对于位置  的计算公式为:
的计算公式为:
链接教程阐述了如何利用该方法计算轴向磁悬浮轴承的磁刚度。不过这个示例仅适用于二维轴对称的轴承,因此无法得到 x 向和 y 向的磁刚度。要计算所有方向上的磁刚度,需要在三维中模拟此问题。下面,我们将对上述轴向磁悬浮轴承创建一个三维模型,并确定其刚度 kx 。可以从“案例下载”中下载这个示例教程。
这个方法主要涉及使用磁场,变形几何 接口以及灵敏度 接口。同二维模型一样,我们也会用到磁场 接口。磁体模拟时使用了安培定律 特征,其本构关系设置为 1[T] 的剩余磁通密度。计算力 只须添加到内部磁体,并将几何参数化,使内部磁体的位置在 x 方向上存在 X0 的偏移。参数 X0 随后会用于参数化扫描。另外,变形几何 接口将用于分析向 x 方向的附加(虚拟)网格位移 dX 所施加的力的灵敏度。计算 x 向的磁刚度时这里仅使用四分之一几何。
注意,此配置中仅正确计算了 x 轴上的力。根据对称性,y 向和 z 向的力应当为零。不过因为仅模拟了四分之一几何,所以计算出的力会相当大。同样地,还可以计算 y 向的刚度,即根据 yz 平面和 xy 平面分别对称地切割整个模型,获得四分之一模型并对其进行分析。


左图:用于计算刚度的轴向磁悬浮轴承的四分之一三维模型。右图:半个模型中的磁通密度模和磁通密度箭头图。结果是使用“三维镜像”数据集在 xy 平面绘制的。
变形几何 接口对无限元域以外的所有其他域都进行了求解。要求解这个区域,首先在磁体附近的空气域添加一个自由变形 节点。同样地,可以向沿 x 轴的内部磁体域添加一个指定的变形 dX。最后,向内部磁体边界和对称的截平面边界添加两个指定网格位移 节点,如下图所示。

内部磁体域上设置的指定变形。

内部磁体边界上设置的指定网格位移。

对称截平面上设置的指定网格位移。
在灵敏度 接口中添加全局目标 特征,在“全局目标”设定下的目标表达式中指定 x 向的总力(即,4*mf.Forcex_0)。这里,mf.Forcex_0 指磁场 接口中“计算力”特征计算出的 Maxwell 应力张量力的 x 分量。同样地,添加全局控制变量 dX,如下图所示。

全局目标设置(左图)和全局控制变量设置(右图)。
因为灵敏度(和优化)研究不能与参数化扫描 研究节点合并,所以模型必须在两个单独的研究中求解。第一个研究包含灵敏度求解器和稳态求解器。随后的第二个研究包含参数化扫描研究,但会使用研究 1 作为参考。对参数 X0 在 range(0,1.5/20,1.5) 区间内执行参数化扫描,其设置如下。


左图:灵敏度分析的稳态研究设置。右图:以研究 1 为参考的参数化扫描研究设置。
将 x 轴上的磁力和 x 向的磁刚度绘制为一维全局图。

磁力图的设置(左图)和磁刚度的设置(右图)。


左图:电磁力的 x 分量是 x 轴上偏移的函数。右图:磁刚度 kxx 是 x 轴上偏移的函数。
总结
在本文中,我们讨论了使用 COMSOL Multiphysics 的 “AC/DC 模块”的接口可以模拟的几类磁悬浮轴承。仿真简化了这几类轴承设计参数的计算方法,从而优化了轴承性能,延长了使用寿命。
在这一系列的下一篇博客中,我们将重点讨论如何使用 COMSOL Multiphysics 模拟磁齿轮。敬请关注!
编者注:本篇博客文章于 2017 年 9 月 5 日更新。