声阱为各种生物医学应用提供了一种操控细胞和粒子的无接触式方法。在典型的声阱设备中,压电换能器在流体中产生压力场,从而产生能有效捕获流体中微小悬浮物的声辐射力。这篇博客,我们将深入探讨一个包括热声流和粒子追踪的声阱模型。
声阱简介
1874 年,August Kundt 首次证明了声波可以对暴露粒子施加声辐射力。自 20 世纪 90 年代以来,这一原理就已经被应用在微流体装置和片上实验室系统中,如今,商业化的声阱设备已被全球生命科学实验室和医疗机构广泛采用,用于低浓度样品的富集和纯化,细胞之间的相互作用研究、粒子分选,以及现场即时诊断的细菌、病毒或生物标记物的分离等。
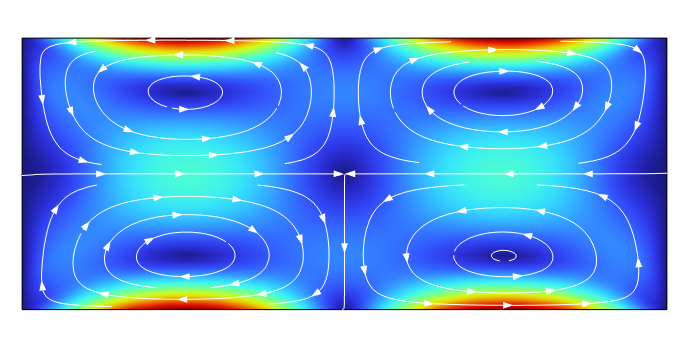
图 1 微流体通道横截面上的声流,可用于生物流体样品中对粒子进行浓缩或分离。
声阱中诱发的声波会产生声流,即在捕获位点周围形成快速移动的涡流。这种声流会对流体中的颗粒产生黏性阻力。同时,颗粒也会受到声辐射力的作用。对于大颗粒,声辐射力占主导地位,对于小颗粒,黏性阻力占主导地位。改变主导力性质的颗粒临界尺寸取决于具体的设备和颗粒的声学特性。在大多数设备中,声辐射力用于捕获或控制颗粒,因此,来自声流场的黏性阻力通常会阻止小于临界尺寸的小颗粒被声阱捕获。
了解这些信息后,让我们深入探讨如何在 COMSOL Multiphysics® 中模拟声阱。您可以从案例库中下载文中讨论的玻璃毛细管中的声阱和热声流三维模型。
声阱仿真
示例的三维声阱几何结构如下图所示。声阱系统的几何沿两个平面对称,因此只需要计算系统的 1/4 几何:装满水(蓝色)的 1/4 玻璃毛细管(黄色)及其下方的 1/4 微型压电换能器(灰色)。实际上,相较于 0.48 mm 的高度和 2.28 mm的宽度,约 5 cm 的玻璃毛细管非常长,因此使用完美匹配层(PML)对其两端进行模拟。完美匹配层是一个可添加到几何体中的域,用于模拟所有出射波的衰减和吸收。下图中绿色显示为包含 1/2 毛细管一端的完美匹配层。在此模型中,完美匹配层在玻璃毛细管和流体中都处于激活状态。
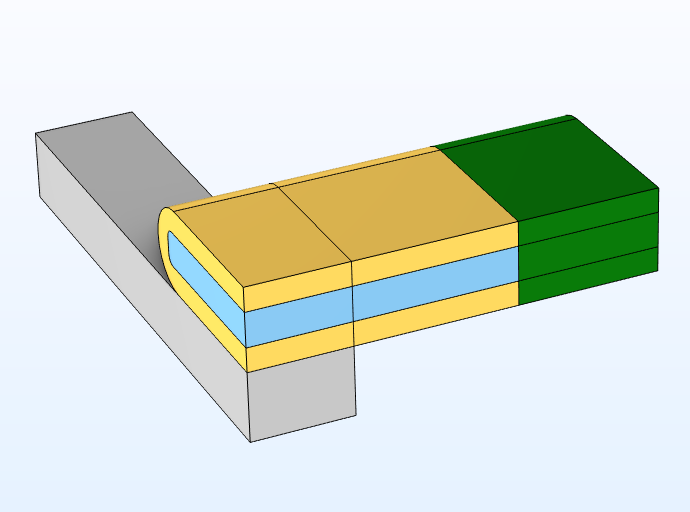
图 2 声阱的 1/4 几何结构。
声阱仿真是一个复杂的多物理场问题,涉及电磁学、固体力学、声学和流体流动等多种现象,某些情况下,还包括传热。压电换能器上的振荡电压差会引起压电材料振动,进而引起玻璃毛细管振动。这种压电效应通过耦合压电传感器域中的静电与压电传感器和玻璃毛细管的固体力学来模拟。为了模拟流体中产生的压力场,在玻璃毛细管和流体之间的边界上使用了声-结构多物理场接口,用于耦合固体力学与压力声学。
此外,压电换能器中的能量耗散会使系统升温,在玻璃毛细管和流体中产生温度梯度,进而在流体的声学特性中产生梯度,影响声流。非等温流动的多物理场耦合考虑了这种温度梯度的影响,将整个几何结构(固体和流体)的传热仿真与流体域中的蠕动流模型相结合。蠕动流和压力声学之间的耦合用于模拟声流。最后,为了验证声阱模型是否按照预期工作,使用了粒子追踪技术来确定流体中两类颗粒的轨迹,即大颗粒硅玻璃和小颗粒聚苯乙烯。
接下来,我们来看看仿真结果!
仿真结果
声场
声场使用频域计算。在频率为 3.84 MHz 的超声状态下激励系统。该频率波长的 1/2 约等于流体腔的高度。压电换能器中的电场、压电效应在压电换能器和玻璃毛细管中产生的位移场,以及由此在流体中产生的声压场如下图所示。在压电换能器上方,声场包含一个最小压力区域,称为压力节点。
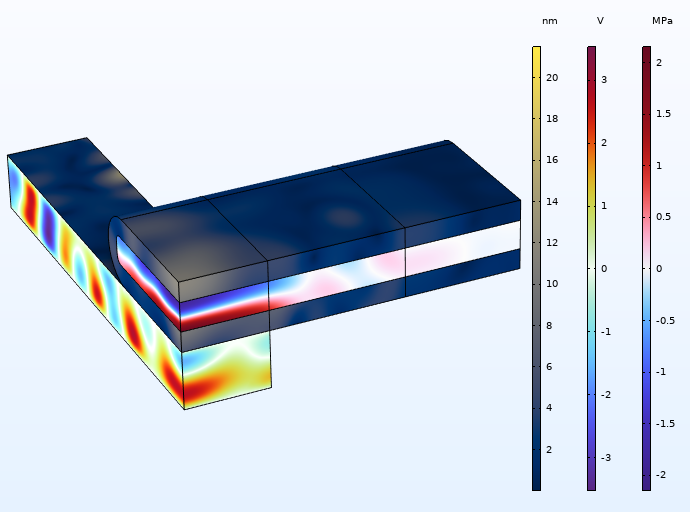
图 3 声阱中的位移场(nm)、电场和压力场。
声场中作用在颗粒上的声辐射力可以用 Gor’kov 势能来描述。图 4 显示了模型中计算的小颗粒聚苯乙烯 Gor’kov 势能。悬浮在流体中的颗粒会被推到最小 Gor’kov 势能处,从而被困在玻璃毛细管的中心。有关声辐射力的详细讨论以及如何使用 COMSOL Multiphysics® 计算声辐射力,请查看我们之前的博客。
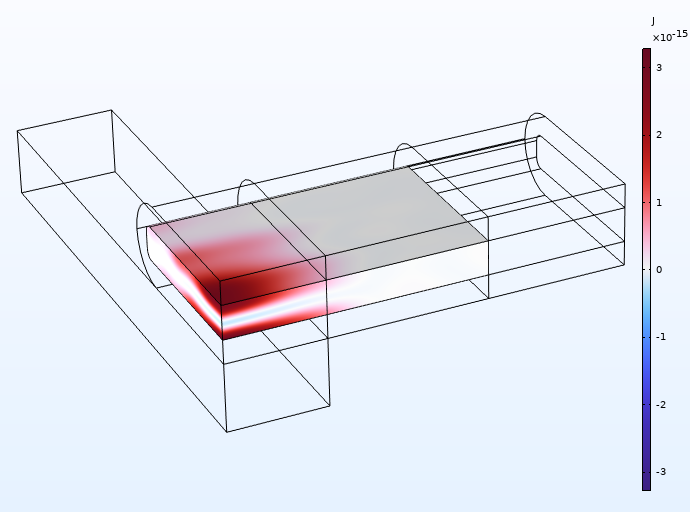
图 4 直径为 1 µm 的聚苯乙烯颗粒的 Gor’kov 势能。
热声流
声流的仿真结果如何?下图的模拟结果显示,压电换能器上方有四个涡流,这只能用温度场来解释。压电换能器的升温引起玻璃毛细管和流体产生温度梯度,从而产生流体密度梯度和可压缩性梯度。流体材料参数中的这些梯度与声学相互作用产生热声体积力,热声体积力产生声流,最终形成这种特定的声流模式。
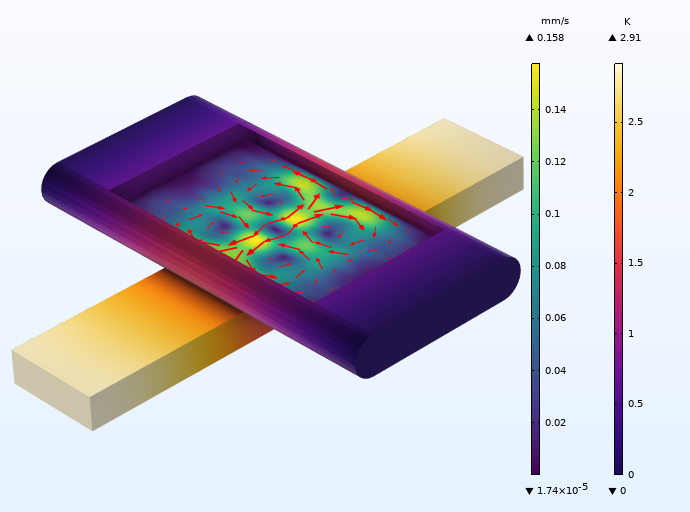
图 5 玻璃毛细管内的热声流和温度梯度。根据对称平面绘制的声阱实际几何。
粒子轨迹
通过粒子追踪,我们还可以了解具有特定性质的颗粒是否会被吸入声阱。下面的动画显示了直径为 10 µm 的大颗粒硅玻璃和直径为 1 µm 的小颗粒聚苯乙烯的计算轨迹。压电换能器上方的硅玻璃颗粒向玻璃毛细管中心移动并被困在那里,而较小的聚苯乙烯颗粒的移动则受流体流动的控制。
图6 大颗粒硅玻璃的运动轨迹。
图 7 小颗粒聚苯乙烯的运动轨迹。
动手尝试
有兴趣自己动手建立文中示例的多物理场模型吗?点击下面的按钮即可下载该模型的 MPH 文件:
扩展阅读
您也可以在 COMSOL 案例库中找到一些包含声流和声阱的教程模型:
武士刀(katana)是几个世纪以前的日本武士使用的一种传说中的兵器,因其弯曲的形状和锋利的单刃而广为人知。这篇博客,我们将讨论如何使用 COMSOL Multiphysics® 软件建立一个简单的武士刀模型,并通过模拟局部淬火过程来探讨其特性。
内容简介
著名的武士刀
很少有武器能像日本武士(samurai)的随身武器——武士刀一样闻名于世。武士刀以锋利著称,只有在最后关头才会出鞘,武士刀及其与主人之间近乎神圣的联系激发了多部现代电影、电视剧和书籍的创作灵感。在电影《杀死比尔 I》(2003)和《杀死比尔 II》(2004)中,Uma Thurman 扮演的 “新娘”在现代东京挥舞着武士刀;在 James Clavell 的经典小说《幕府将军》(Shogun,1975)中,James Blackthorne 船长被吹到日本海岸,并被日本武士俘虏。

一名日本武士,照片由摄影师 Felice Beato 拍摄于 1860 年。这张照片在美国属于公有领域,它在日本的版权于 1970 年到期,而且 Uruguay Round Agreements Act 也没有恢复其版权。来源:Britannica。
当然,武士刀的大部分恶名是因其使用者而获得的。但是,日本刀匠是如何为日本武士打造这些武器的呢?他们是如何在刀刃的软硬之间实现微妙的平衡,使武士刀既锋利无比,又有足够的韧性来承受反复的冲击?为什么武士刀的刀刃是弯曲的,而不是笔直的?这篇文章,我们将介绍如何模拟武士刀的局部硬化过程,并研究其中包括的物理效应,来看看能否对这一历史上著名的武器制作过程有所了解。
金属加工模块
金属加工模块是 COMSOL Multiphysics® 的一个附加产品,可用于模拟如钢铁等铁合金和 Ti-6Al-4V 等钛合金的相变,以及钢淬火和增材制造等应用。例如,钢淬火可用于汽车变速箱部件的淬火仿真,增材制造则涉及打印过程中出现的反复冷却-加热循环。耦合了固体力学和传热的相变仿真,能够帮助观察塑性和相变潜热等作用。
局部硬化
大多数情况下,仅需要对组件的部分区域进行淬火。例如,感应淬火就是这样一种工艺。它通过线圈施加强交变磁场,从而在组件表面产生感应电流。然后对组件进行淬火,使组件表面区域发生马氏体转变。这种局部淬火工艺通常用于车轴和齿轮等传动组件,以提高耐磨性和抗疲劳性。
火焰淬火是另一种可用于获得组件硬表面的工艺。这种工艺不使用交变磁场,而是通过将气体火焰施加在组件表面进行局部加热,然后进行淬火处理。
当然,感应淬火和火焰淬火是相对新颖的热处理工艺,数世纪以前的日本刀匠根本无法使用。制作传统的日本武士刀使用的是另一种局部淬火工艺。对于武士刀这种类型的兵器来说,最好的状态是刀刃锋利且边缘坚硬(理想情况下是纯马氏体),同时剑脊最好具有韧性,例如珠光体,否则可能会在受到冲击时断裂。对武士刀进行不同程度的局部硬化的传统方法是,通过在刀刃上涂抹绝缘黏土来影响刀浸入水中时钢向周围水体的热量传递。刀身的不同区域会被涂上不同厚度的黏土,刀刃附近涂的黏土层较薄,其他部分涂的黏土层较厚。
热处理过程涉及的多物理场
钢构件的热处理仿真需要确定模型中应包括的相关物理现象。
从根本上说,热处理过程由与外部热交换产生的热量传递驱动。组件(此处为武士刀)内部温度的变化会引起冶金相变(奥氏体分解为铁素体、珠光体等)。在相变过程中,会产生潜热,从而影响温度。与热膨胀和相间密度差异相关的体积变化会导致组件变形,进而产生机械应力和塑性应变。而众所周知,在存在机械应力的情况下发生的相变会导致材料产生非弹性应变,即所谓的相变诱导塑性(TRIP)。淬火过程本质上是多物理场相互作用的过程,并且各个冶金相具有不同的材料属性,因此会产生平均的、与相组成相关的复合材料行为。
对于本文所建立的武士刀热处理模型,我们进行了以下简化:
- 忽略了相变过程中的潜热
- 忽略了相变诱导塑性应变
武士刀热处理过程中涉及的多物理场如下图所示。
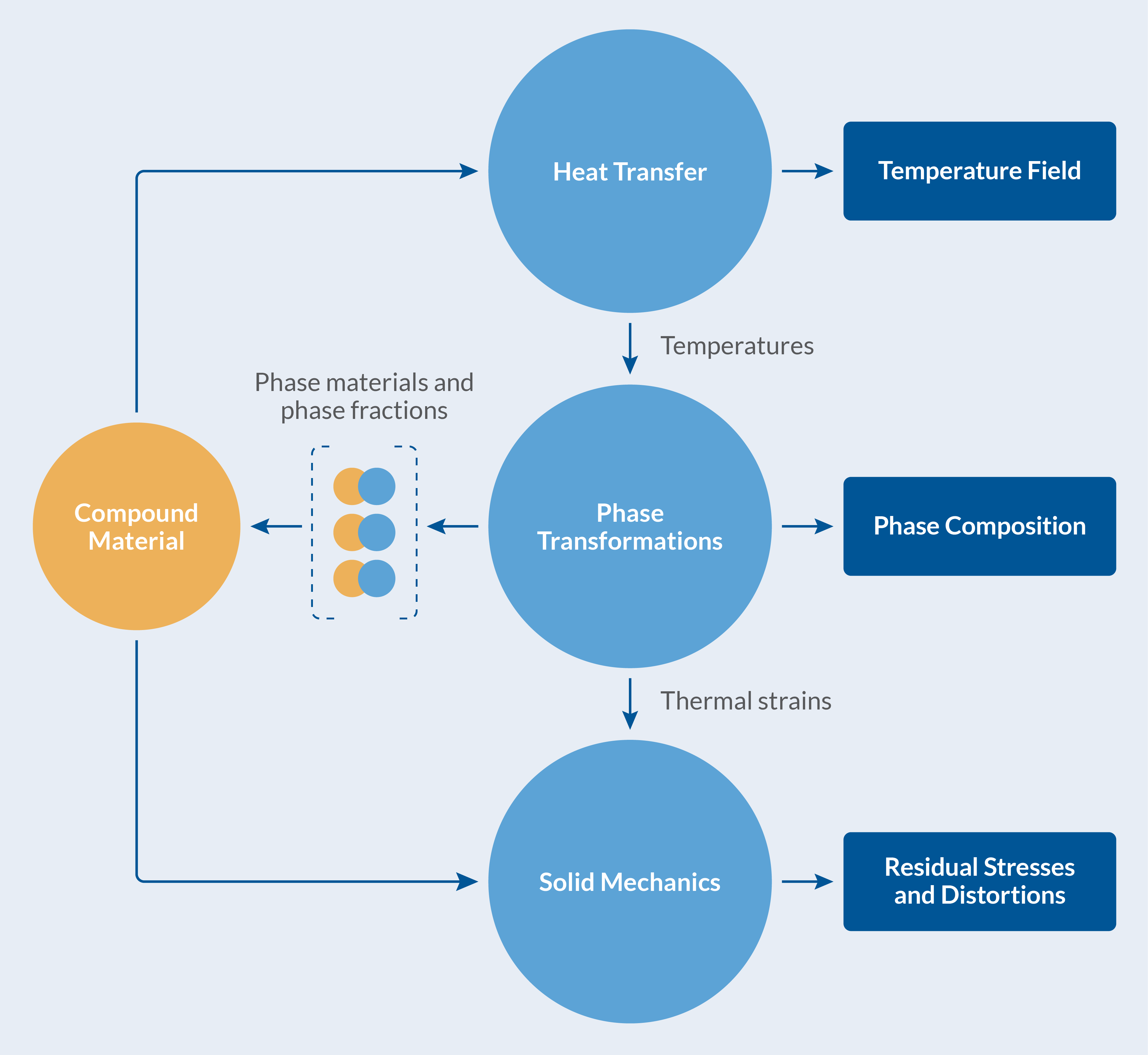
武士刀热处理过程中涉及的多物理场。
武士刀的材料
传统的武士刀制作是在刀刃的不同部分使用不同类型的钢材。通常,刀刃与刀身内芯材料不同,最显著的区别是碳含量不同。碳含量以及其他合金元素对钢材的热性能和机械性能以及相变特性都有很大影响。在此,我们将其简化为单一钢材,其合金含量如下表所示:
| 元素 | 重量百分比(wt%) |
|---|---|
| C | 0.63 |
| Mn | 0.9 |
| P | 0.04 |
实际上,钢材中还含有其他合金元素,但为了简单起见,除碳(C)之外,我们只考虑锰(Mn)和磷(P)。
武士刀的几何结构
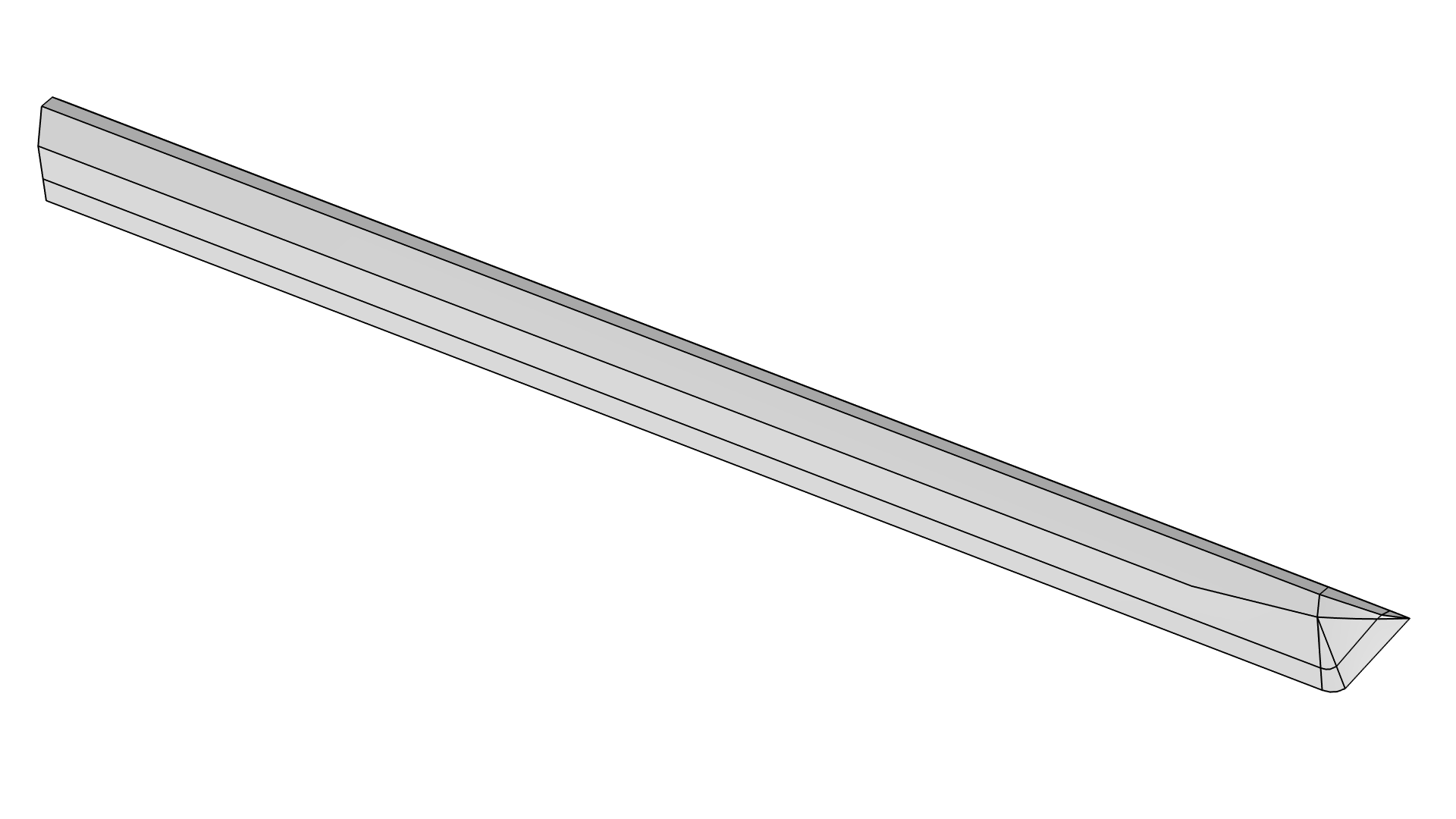
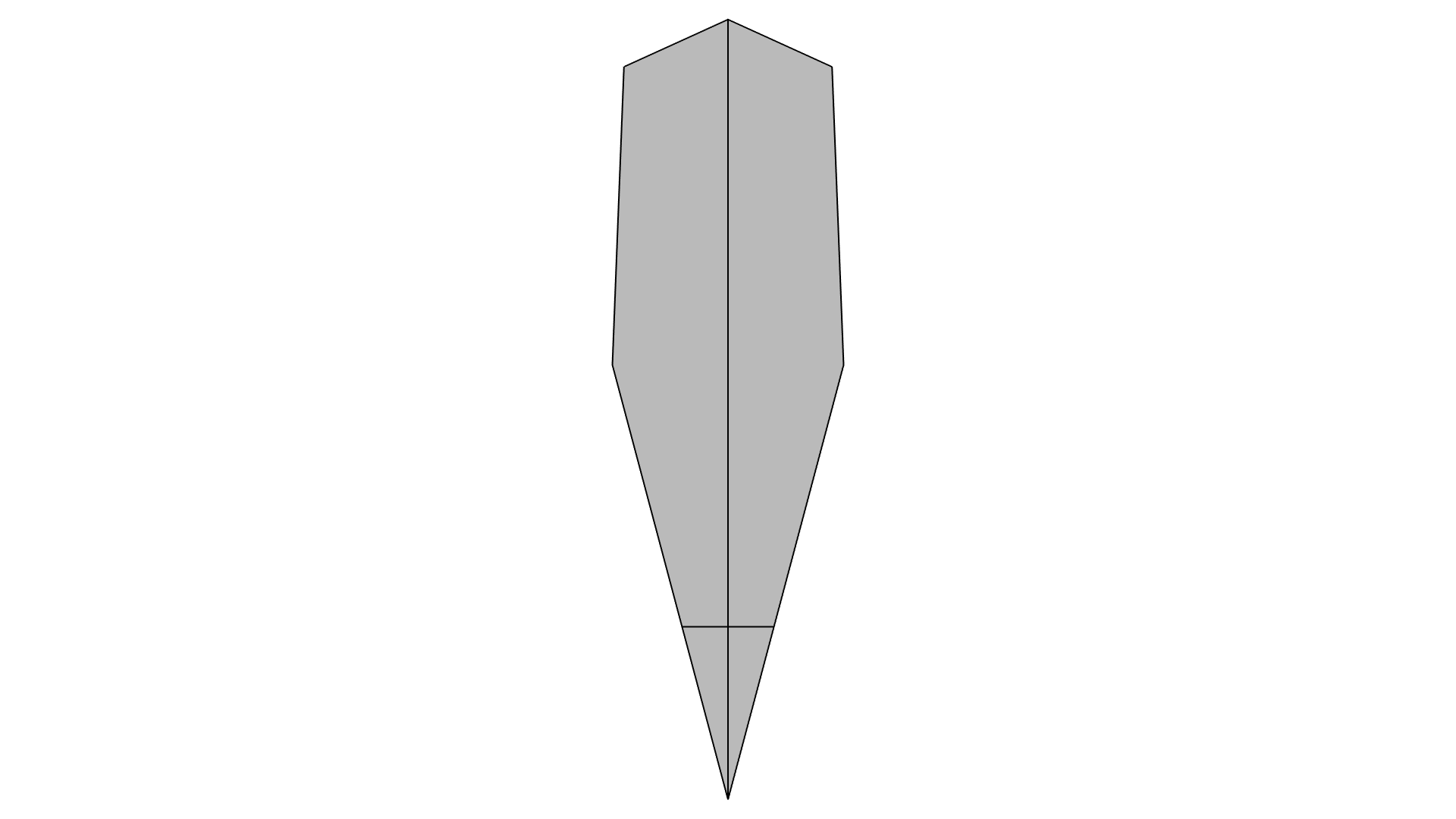
武士刀的几何结构,刀身长度为 50 cm(左),刀身横截面高度为 2.8 cm(右)。
相变仿真
不同相组成的钢材性能不同,因此需要对各种可能的相变进行表征。在室温下,钢的基本组成为 50% 铁素体和 50% 珠光体。首先加热武士刀,直到其基本组成完全转变为奥氏体。然后在水中淬火,以获得最终的相组成。这种相组成在空间上会有所变化,通常是铁素体、珠光体、贝氏体、马氏体以及可能的残留奥氏体的某种组合,见下图。材料相的空间变化受每个材料点在冷却过程中所经历的温度的影响。
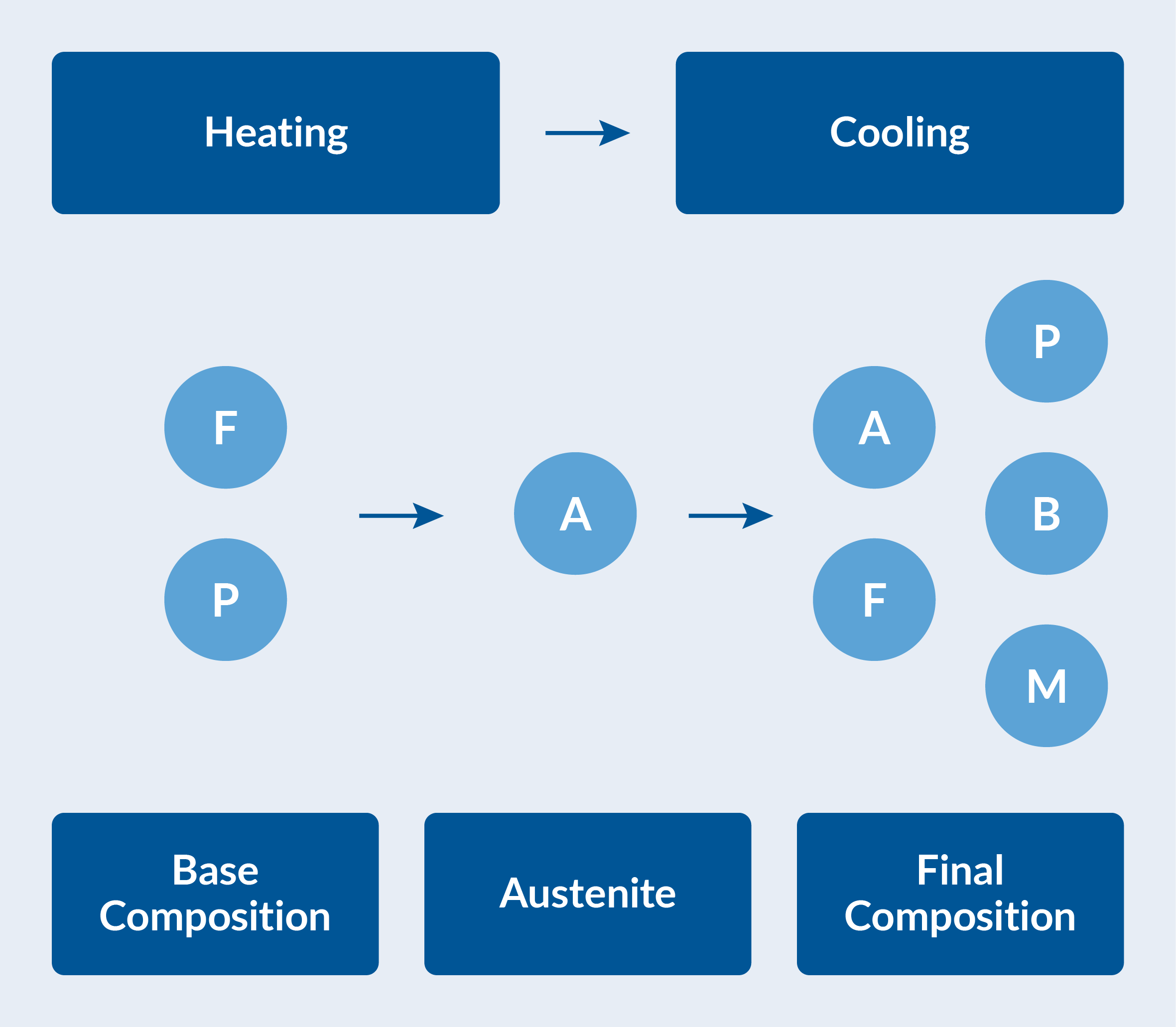
加热和冷却过程中的相组成。铁素体(F)和珠光体(P)的基本组成在加热时转化为奥氏体(A)。奥氏体在冷却过程中分解为铁素体、珠光体、贝氏体 (B) 和马氏体 (M)。
加热
加热模拟不仅是为了模拟铁素体-珠光体钢的奥氏体化,也是为了模拟加热时产生的热应变。请注意,我们本来可以在冷却开始时施加初始应变,以包括热应变的影响,从而省略加热过程,但我们选择在冷却模拟前进行加热模拟。不过,由于我们并不关心奥氏体的形成本身,因此使用 Leblond-Devaux 相变模型来模拟铁素体-珠光体基本组成中奥氏体的形成。相变模型使用了 附加源相 子节点,因此铁素体和珠光体在奥氏体的形成过程中都是源相。奥氏体 (A)、珠光体 (P) 和铁素体 (F) 的相分数速率分别由以下公式给出:
其中,奥氏体的平衡相分数为 1(完全奥氏体化),时间常数设为 60 s:
此外,我们只允许在加热过程中进行这种相变,具体方法是使用 变换条件 子节点, 在该节点中输入以下条件 c:audc.Tt>0。
冷却
当完全奥氏体化的武士刀在水中淬火时,奥氏体会分解成铁素体、珠光体、贝氏体和马氏体的组合。整个刀身不同位置的冷却速度,会形成不同的相含量。这表明,与加热模拟相比,冷却模拟时需要对相变进行更详细的描述。因此,使用 Johnson–Mehl–Avrami–Kolmogorov(JMAK) 相变模型模拟奥氏体分解为铁素体、波来石和贝氏体的过程。该模型适用于扩散相变模拟。它有三个参数:
- 平衡相分数,

- 时间常数,

- Avrami 指数,

平衡相分数表示目标相的平衡相分数,可视为长期渐近线。例如,对 Fe-C 图中的奥氏体和铁素体两相区域应用杠杆原理,就可以计算  和
和  温度之间的铁素体平衡相分数。要确定其余参数,可以利用时间-温度-转变 (TTT) 图。TTT 图通常显示每种冶金相开始形成的时间和每种转变结束的时间。TTT 图假定在等温条件下进行,也就是说如果要通过实验获得 TTT 图,首先应将试样快速冷却到“目标温度”
温度之间的铁素体平衡相分数。要确定其余参数,可以利用时间-温度-转变 (TTT) 图。TTT 图通常显示每种冶金相开始形成的时间和每种转变结束的时间。TTT 图假定在等温条件下进行,也就是说如果要通过实验获得 TTT 图,首先应将试样快速冷却到“目标温度”  ,然后保持在该温度。在一定温度范围内重复这一过程,该温度范围通常是从奥氏体化温度到马氏体形成温度。
,然后保持在该温度。在一定温度范围内重复这一过程,该温度范围通常是从奥氏体化温度到马氏体形成温度。
下列示意图的下半部分显示了一个 TTT 图,其中两条曲线分别表示形成 1%和 99% 的目标相所需的时间。这些分数都是相对相分数,表示在每个温度水平下,目标相与该温度下可达到的最大值的比例。相对相分数由  给出,其中平衡相分数一般与温度有关。请注意,如果已经通过实验确定了这两条 TTT 曲线,就可以在每个温度下精确拟合 JMAK 相变模型。然后,中间相对相分数将由 JMAK 模型的公式决定。示意图的上半部分显示了在
给出,其中平衡相分数一般与温度有关。请注意,如果已经通过实验确定了这两条 TTT 曲线,就可以在每个温度下精确拟合 JMAK 相变模型。然后,中间相对相分数将由 JMAK 模型的公式决定。示意图的上半部分显示了在  下,由特定相变模型控制的目标相的演变过程。
下,由特定相变模型控制的目标相的演变过程。
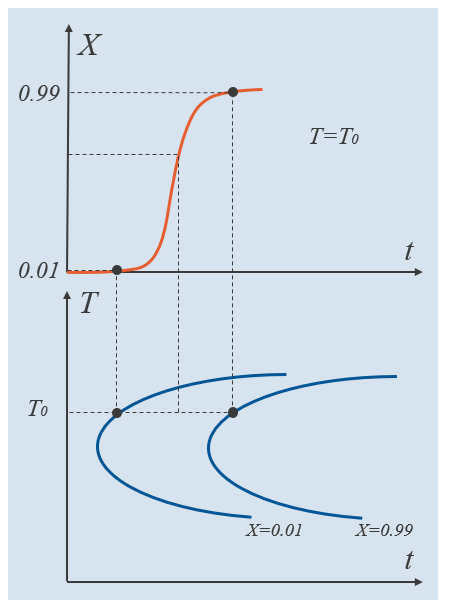
相对相分数为 0.01 和 0.99 时的 TTT 曲线示例。图中标出了中间相对相分数。
在 COMSOL Multiphysics® 中,JMAK 相变模型以速率形式表示,因此适用于非等温条件。不过,在 TTT 意义上,我们可以对 JMAK 模型进行符号积分。目标相随时间的演变过程变为:
经过一些处理后,可以将这个等式重新写为:
如果使用上图中的开始和结束时间以及相分数,假设平衡相分数已知,就可以确定 Avrami 指数 n 和时间常数 :
这正是 相变 节点中 JMAK 相变模型的 TTT 图数据 表述方式。
在当前的武士刀淬火模型中,我们使用了三组虚构但合理的开始和结束 TTT 曲线,用于分别将奥氏体分解为铁素体、珠光体和贝氏体。铁素体数据的一部分如下表所示:
 |  |  |
|---|---|---|
| 575 | 2.2 | 43 |
| 580 | 0.22 | 2.1 |
| 585 | 0.075 | 1.42 |
| 590 | 0.076 | 1.47 |
| 595 | 0.078 | 1.47 |
| 600 | 0.079 | 1.49 |
| 605 | 0.081 | 1.54 |
| 610 | 0.084 | 1.58 |
| 615 | 0.086 | 1.63 |
| 620 | 0.090 | 1.70 |
 | | |
| | |
| 730 | 5.8 | 110 |
| 735 | 13 | 254 |
| 740 | 41 | 820 |
| 745 | 322 | 6246 |
为了完成相变模型的定义,还需要确定:
- 铁素体、珠光体和贝氏体在各自相变过程中与温度相关的平衡相分数。
- 相变的温度上限和下限。例如,
 定义了铁素体转变的起始温度,而
定义了铁素体转变的起始温度,而  则是马氏体的起始温度。
则是马氏体的起始温度。
平衡相分数和不同的转变温度使用 奥氏体分解 接口下的 钢成分 节点,根据化学成分计算。
我们只允许在冷却过程中发生这些相变,与加热过程一样,使用 相变条件 子节点 控制,在该节点输入以下条件 c:audc.Tt<=0。
当结合使用铁素体、珠光体和贝氏体相变的 TTT 曲线时,就可以使用 奥氏体分解 接口计算出 TTT 图。下图显示了计算出的 TTT 图。为了模拟这种情况,我们在零维中使用 奥氏体分解 接口,并通过选择相节点中的 计算转变时间 来获得达到特定相分数的时间。
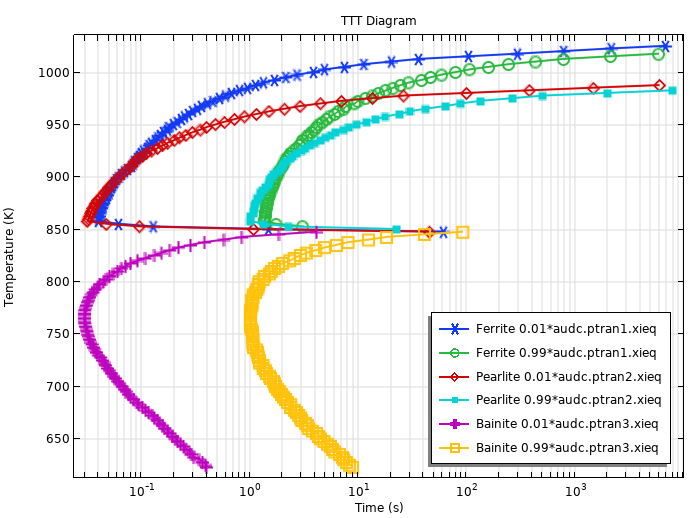
使用虚构的 TTT 数据计算出的 TTT 图。
马氏体相变由 Koistinen–Marburger 相变模型描述。定义该模型需要两个参数:
- Koistinen–Marburger 系数,

- 马氏体开始温度,
与等温条件下考虑的扩散铁素体、珠光体和贝氏体转变不同,马氏体转变本质上取决于温度速率。根据 Koistinen–Marburger 模型,马氏体的形成速率通过 系数与冷却速率成正比。
在定义了所有相变之后,我们还可以计算连续冷却转变(CCT)图。下图所示为 CCT 图,其中奥氏体化温度为 900 °C,冷却速度范围为 0.1 K/s 至 1000 K/s。图中的 1% 线表示已形成的铁素体、珠光体、贝氏体和马氏体相。奥氏体也显示了 1% 线,表示奥氏体分解完成,即几乎所有奥氏体都分解成了其他相。
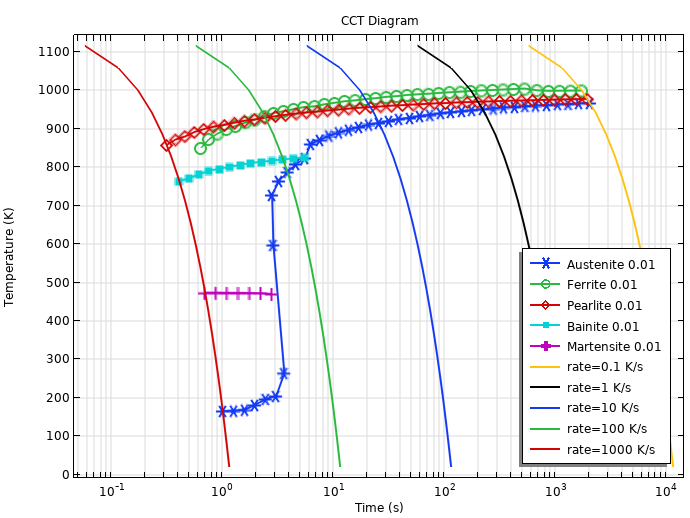
根据 TTT 数据计算的 CCT 图。
材料的机械和热性能
要建立武士刀这样的钢铁组件的淬火过程的详细模型,需要了解其机械和热性能。这些性能在不同相(如奥氏体和铁素体)之间存在差异,而且还取决于温度。对于弹塑性特性,一般还取决于应变和可能的应变率。通过实验获得一整套材料特性既耗时又昂贵,因此往往难以实现。在实践中,会使用其他来源,包括文献中的实验数据和计算的材料特性。本模拟的目的是演示武士刀的淬火过程,因此我们对模型进行了如下简化:
- 弹性特性在各相之间保持一致,但其余特性在各相之间有所不同。
- 导热系数和热容量与温度有关。
- 初始屈服应力与温度有关。
- 各相的硬化行为是线性的、各向同性的,并且与温度有关。
- 热膨胀系数不变,但体积参考温度不同。
各相的材料特性与演变的相组成(相分数)可一起用于计算有效材料属性。这项工作是在金属加工模块中自动完成的,计算出的有效材料属性被收集在 复合材料 中,与其他物理场接口共享,见下图。
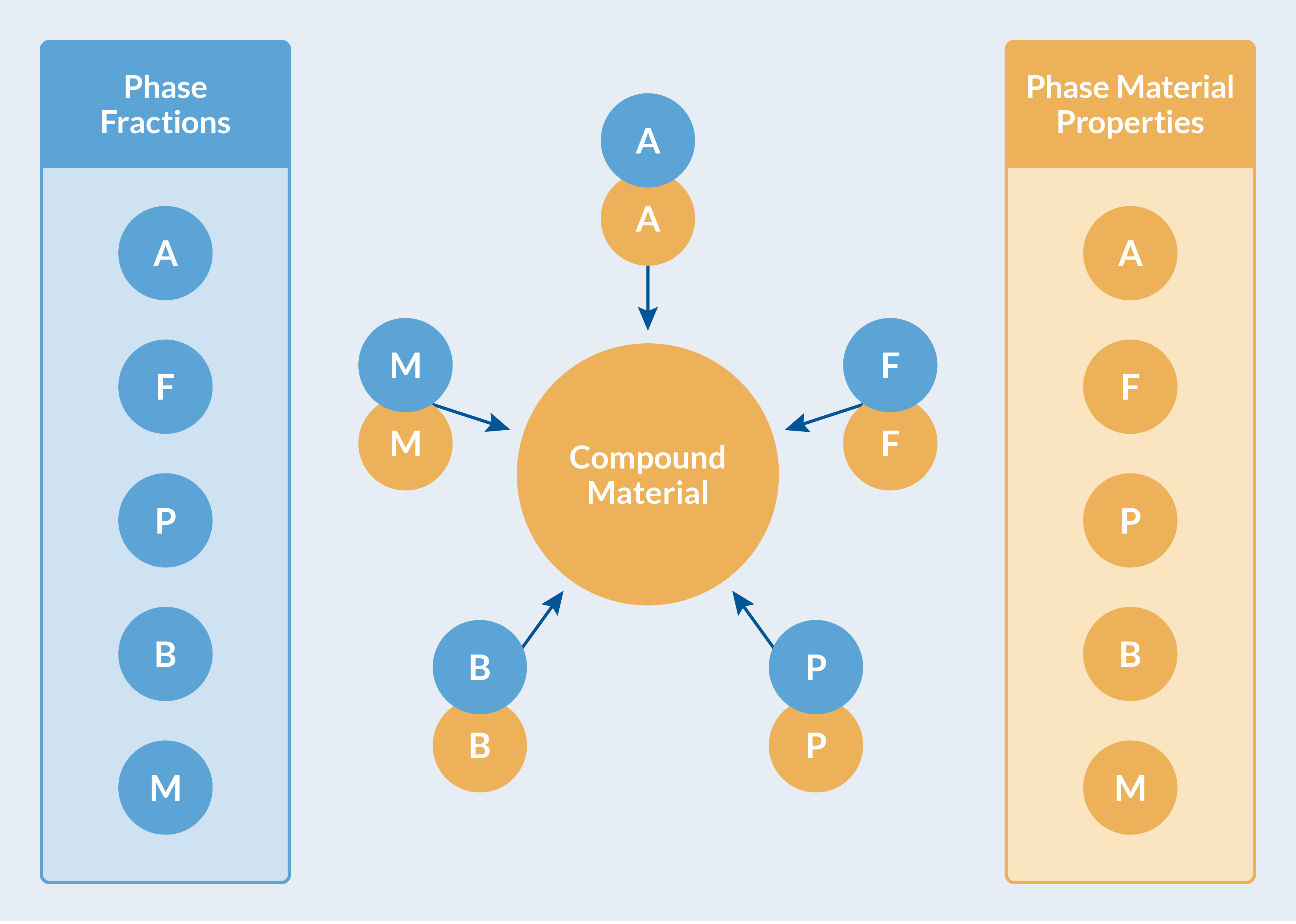
计算出的有效材料属性被收集在 复合材料 中 。
传热仿真
使用 固体传热 接口来模拟武士刀内的热传递以及与周围环境的热交换。为简化问题,我们忽略了辐射传热,仅通过对流传热来模拟刀刃到周围环境的热传递。在刀片表面指定了一个热通量,并使用与温度相关的热传导系数表征。
加热
加热武士刀是为了使铁素体-珠光体基本组分奥氏体化。为了模拟这一过程,我们使用了一个简化的对流模型,采用恒定的传热系数 300 。在加热的第一分钟内,环境温度从室温跃升至 850°C,然后在整个加热过程中保持恒定。选择总时间是为了使材料完全转变为奥氏体,并且加热时武士刀内的热梯度要足够低,以防止热致塑性应变。
。在加热的第一分钟内,环境温度从室温跃升至 850°C,然后在整个加热过程中保持恒定。选择总时间是为了使材料完全转变为奥氏体,并且加热时武士刀内的热梯度要足够低,以防止热致塑性应变。
冷却
为了模拟不同厚度的隔热黏土的效果,刀片边缘附近区域的传热系数与刀片上部的有所不同。
下图显示了表示薄层和厚层黏土随温度变化的传热系数。
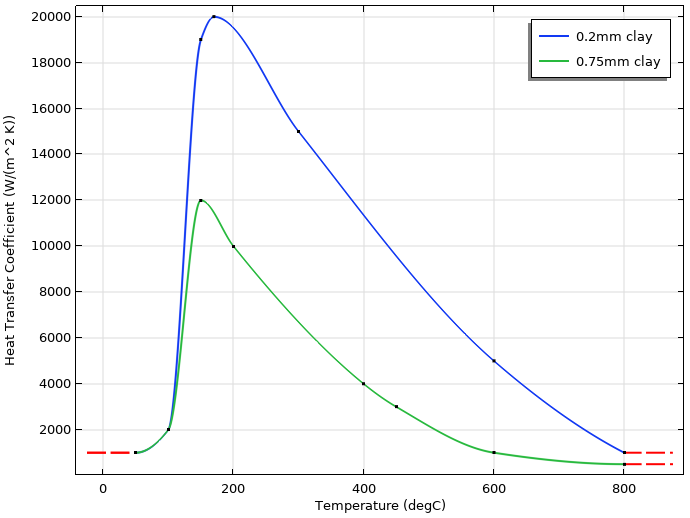
薄层(0.2 mm)和厚层(0.75 mm)黏土随温度变化的传热系数。薄层用于刀片边缘,厚层用于刀片其余部位。
应力和应变仿真
使用 固体力学 接口计算武士刀在热瞬态过程中的应力、应变和变形。我们在前面已经指出,热膨胀和各相之间的密度差异会导致组件变形以及机械应力和塑性应变。因此用 奥氏体分解 接口模拟这些效应,并将它们通过 相变应变 多物理场耦合转移到 固体力学 接口。我们预计武士刀会有明显的弯曲。细长结构的弯曲不一定会产生较大的材料应变,但是会涉及有限旋转,因此分析是几何非线性的。预计弯曲也会产生塑性应变,因此使用 线弹性材料 的 塑性 子节点考虑这一点。
结果
武士刀最显著的特征之一就是刀刃弯曲。有趣的是,这种弧度是在淬火过程中产生的,而不是在热处理之前将刀刃弯曲所致。由于刀刃靠近边缘的部分较薄,隔热黏土也涂得更薄,因此温度迅速下降,刀刃最初会随着奥氏体冷却和收缩而向下弯曲。当温度降至马氏体开始温度以下时,奥氏体开始转变为马氏体。转变为马氏体的过程伴随着体积膨胀,从而在刀片边缘产生压应力。随着冷却向刀脊部位推进,冷却速度降低,其他冶金相也随之形成。刀刃从最初的向下弯曲过渡到最终的传统弧形。下图显示了冶金相的最终组成。值得注意的是,刀刃是马氏体,因此硬度较高,但刀脊主要是珠光体,因此韧性更好。
冷却结束时的轴向应力(上)、等效塑性应变(中)和马氏体相分数(下)。
淬火后的最终组成。刃口具有理想的硬马氏体结构,刃脊大部分为珠光体。
学以致用
在这篇博客中,我们展示了如何使用 COMSOL Multiphysics® 模拟武士刀的淬火过程。通过仿真,我们解释了武士刀的弯曲形状是如何形成的,以及使用黏土进行局部淬火的简化传统工艺如何制作出刀刃硬而刀芯软的刀片。当然,对武士刀进行建模只是出于我们的好奇心,但它表明 COMSOL Multiphysics® 可用于模拟一般的钢淬火,不仅可以计算冶金相的组成,还可以预测变形和残余应力。
动手尝试
想尝试自己建立武士刀的局部淬火模型吗?COMSOL 案例库中提供了相应的模型文件,欢迎下载。
2024 年欧洲杯将采用全新的 Adidas® Fussballliebe® 足球。这款足球表面结构独特,融合了深圆形和半圆形棱脊和凹痕设计,并保留了传统的面板接缝。当我第一次看到这款足球的照片时,我就知道我们必须对其进行仿真,来评估它的空气动力学特性。因此,我们决定运行一组仿真研究,并将结果与 2018 年 FIFA 世界杯( 2018 FIFA World Cup®)中使用的 Adidas® Telstar® 足球进行对比。接下来,让我们来一起探索……
新设计的演变
6 月 14 日,在慕尼黑举行的德国对阵苏格兰的比赛拉开了 2024 年欧洲杯足球赛的帷幕。阿迪达斯一如既往地为本届赛事提供了一款全新比赛用球 Adidas® Fussballliebe®,其面板设计与 2022 年卡塔尔世界杯官方用球 Adidas® Al Rihla® 相似。不过,新款足球面板上的棱脊和凹痕设计明显不同,这种设计风格也出现在美国职业足球大联盟比赛用球 Adidas® MLS 2024 和巴黎奥运会官方比赛用球 Adidas® Île-de-Foot 24 中。

Adidas® Fussballliebe® 具有非常独特的表面设计。
在之前的系列博客中,我们对比过 Adidas® Telstar® 和 Nike® Ordem V 足球。此后,Adidas® Telstar® 足球的面板设计被广泛用于各种比赛用球中,包括Adidas® MLS Pro 2020、2020 年欧洲杯官方比赛用球Adidas ® Uniforia® Pro 和 2020 年东京奥运会官方比赛用球 Adidas® Conext® 21。
自 Adidas® Telstar® 诞生以来,阿迪达斯已经推出了多款比赛用球设计,包括 Adidas® Al Rihla® 和2023 年女足世界杯比赛中使用的 Adidas® Oceaunz。不过,与阿迪达斯近期的比赛用球设计相比,Fussballliebe 有了重大转变。因此,将 Adidas® Telstar® 与 Adidas® Fussballliebe® 进行对比,可以帮助我们了解足球最高水平比赛用球的演变,并且可以帮助预测Fussballliebe对 2024 年欧洲杯比赛结果的影响。
是否有球队拥有球权优势?
2024 年欧洲杯的八大夺冠热门球队排名如下:英格兰、法国、德国、葡萄牙、西班牙、意大利、荷兰和比利时队。虽然其中四支球队由耐克赞助,另外四支球队由阿迪达斯赞助,但他们都使用官方用球进行过训练和友谊赛。

八大夺冠热门球队,上排球队由阿迪达斯赞助,下排球队由耐克赞助。
有意思的是,欧洲足球联赛的八强球队与 2024 年欧洲杯排名前八的国家队不谋而合,但这些联赛都不使用 Adidas® 足球。不过,八强球队中的大部分球员都在冠军联赛中踢球,这些比赛使用的是 Adidas® Finale 足球,这款足球的设计与 Adidas® Fussballliebe® 有很大不同。八强球队中来自沙特职业联赛的球员,如西班牙队的艾默里克·拉波特(Aymeric Laporte)、葡萄牙队的克里斯蒂亚诺·罗纳尔多(Cristiano Ronaldo)和若昂·内维斯(João Neves),以及荷兰队的乔尔吉尼奥·维纳尔杜姆(Georginio Wijnaldum)可能会略胜一筹,因为他们习惯使用与 Adidas® Fussballliebe® 相似的 Adidas® Oceaunz足球(尽管凹痕设计不同)。
参加比赛时,熟悉比赛用球非常重要。例如,乌拉圭职业足球经理迭戈·弗兰(Diego Forlán)也曾经是一名球员,他在参加 2010 年南非世界杯之前,曾花了很长时间使用 Adidas® Jabulani® 球进行训练。弗兰是少数几个从比赛一开始就很好地掌握该球的球员之一,他还与托马斯·穆勒(Thomas Müller)、韦斯利·斯内德(Wesley Sneijder)和大卫·比利亚(David Villa)并列成为最佳射手(每个人都进了 5 个球)。
综合考虑这些因素,与参加 2024 年欧洲杯的球员总数相比,使用过阿迪达斯 Fussballliebe 的人数相对较少,但罗纳尔多(Ronaldo)的影响力不容小觑。因此,就比赛用球而言,2024 年欧洲杯比赛用球相对公平。
Adidas® Fussballliebe® 的复杂形状
下图显示了我们在模拟研究中使用的 Adidas® Telstar® 和 Adidas® Fussballliebe® 的几何形状。两只球的总缝合线长度都大约为 4.3 米,不过,后者的宏观表面结构更为复杂,包括棱脊、圆圈和凹痕。两只球都有微观表面纹理,但我们没有将微观表面纹理纳入三维 CAD 几何模型中。


Adidas® Telstar®(左)和 Adidas® Fussballliebe®(右)的几何形状。请注意 Adidas® Fussballliebe® 复杂的宏观表面结构。
从湍流边界层到层流边界层的过渡
我们在之前的文章中讨论过,像任意球这样高速飞行的球在离开球员脚后不久就会产生一个湍流边界层(除了前驻点周围的一小块区域)。湍流边界层在球体周围挤压,只有一个很小的尾流区,这使球能在低阻力下稳定飞行。当速度因阻力的作用而降低时,层流边界层向湍流边界层的过渡会向后移动,最终在球前方的层流边界层发生分离,进而在球后方产生更大的尾流,导致更大的阻力和更不稳定的飞行。如果这种情况发生在球高速旋转的情况下,则会观察到更强的马格努斯效应,从而产生如下轨迹:刚开始球的飞行轨迹可能是直线,但随着边界层分离从湍流过渡到层流,马格努斯效应会使飞行轨迹突然变弯。在1997 年巴西队与法国队的比赛中,罗伯托·卡洛斯(Roberto Carlos)踢出的令人难以置信的任意球就是这一效应的体现。

1997 年 Roberto Carlos 代表巴西队对阵法国队的精彩进球插画。
如果球没有自旋,那么直线轨迹之后就会出现非常难以预测的类似沙滩球的轨迹,球可能会向主轨迹两侧移动数十厘米(甚至数米)。此外,如果过渡发生在高速状态下,由于层流边界层分离产生高阻力系数,球的速度会急剧下降。对于守门员来说,最糟糕的情况就是边界层分离和减速,这会导致球在重力作用下轻微下落。出现这种情况时,看似高出横梁一米多的任意球或射门可能会在轨迹的最后部分突然落入球门。
从层流边界层分离过渡到湍流边界层分离所引起的阻力下降也被称为阻力危机。下图显示了不同球的阻力系数与球速的函数关系。

Adidas® Jabulani® 球(绿色线)、2008 年欧洲杯使用的 Adidas® Teamgeist® II 球(蓝色线)和传统 32 板球(如 1970 年墨西哥世界杯使用的第一款 Adidas® Telstar®)的速度与阻力系数的函数关系示意图。
模型对比:Adidas® Telstar® 与 Adidas® Fussballliebe®
研究中,我们采用了大涡模拟 (LES) 方法和雷诺平均纳维-斯托克斯 (RANS) 方法(使用 k-ε 湍流模型)来分析和比较 Adidas® Telstar® 和 Adidas® Fussballliebe®。
第一种方法,我们采用大涡模拟方法来估算两个球在不同速度下运动的阻力系数。大涡模拟方法能够模拟边界层中层流与湍流之间的过渡,预测两个球的宏观图案、接缝以及 Adidas® Fussballliebe® 上大的棱脊、凹槽和凹痕所造成的阻力危机的相对位置。由于我们的模型几何不包括微观表面纹理,因此无法使用大涡模拟方法计算其对阻力的影响。(请注意,大涡模拟方法不包括表面粗糙度参数)。

使用大涡模拟方法计算 Adidas® Fussballliebe® 的边界层网格。
为了模拟球的微观表面纹理的影响,我们在 k-ε 湍流模型中引入了表面粗糙度参数。但是,该模型假定边界层是湍流的,因此无法预测层流边界层和湍流边界层之间的过渡。k-ε 湍流模型能够预测表面粗糙度的影响,因此可以将其与大涡模拟方法得出的阻力系数进行比较。
仿真结果
下图显示了采用大涡模拟方法计算的 Adidas® Telstar® 和 Adidas® Fussballliebe® 周围的速度场。两个球均以 20 m/s 的速度飞行,远高于阻力危机发生的速度。可以看到,尾流区域较小,因此阻力系数较低,但 Adidas® Fussballliebe® 的尾流区域稍大一些。此外,虽然 Adidas® Fussballliebe® 的尾流似乎更稳定,但两只球后面的分离线相似。动画显示了 Adidas® Telstar® 的边界层分离情况。


带有速度矢量大小的速度场图,以及显示 Adidas® Telstar® 和 Adidas® Fussballliebe® 周围流动路径的流线图。
动画显示了采用大涡模拟方法计算的 Adidas® Telstar® 上边界层的分离情况。
动画显示了采用大涡模拟方法计算的 Adidas®Fussballliebe® 上边界层的分离情况。
当以 20 m/s 的速度飞行时,Adidas® Telstar® 的阻力系数为 0.18,Adidas® Fussballliebe® 的阻力系数为 0.19,这两个数值均由大涡模拟计算得出。这在意料之中,因为 Adidas® Fussballliebe® 具有复杂的宏观表面结构,可能会加剧边界层的转变。
应用 k-ε 湍流模型,并假设表面粗糙度系数为 0.1 mm(等效沙粒粗糙度),来比较这两种球的阻力系数。从下图可以看出,Adidas® Fussballliebe® 的阻力系数(0.21)略高于 Adidas® Telstar®(0.20)。此外,k-ε 湍流模型预测的边界层分离位置与大涡模拟结果大致相同。这也是意料之中的,因为这已经远远超出了阻力危机点,大涡模拟模型中存在湍流边界层,而 k-ε 湍流模型则假定球表面所有位置都存在湍流边界层。此外,与大涡模拟结果相比,k-ε 湍流模型预测的球后面的尾流区域略长。


使用 k-ε 湍流模型计算的速度场图,速度矢量和流线的大小显示了 Adidas® Telstar® 球(左)和 Adidas® Fussballliebe® 球(右)周围的流动路径(Adidas® Telstar® 球的某个瞬时 )。
Adidas® Telstar® 的阻力系数与球速的函数关系表明,其阻力危机出现的时间比传统的 32 面板的球稍晚,但比 Adidas® Teamgeist® II 早。也就是说,它比 Adidas® Jabulani® 和 Adidas® Teamgeist® II 更稳定。Adidas Fussballliebe® 预计比 Adidas® Telstar® 更加稳定,因为其阻力危机出现时间预计仅比传统 32 面板的球稍微晚一点。
下图显示了使用 k-ε 湍流模型模拟 Adidas® Fussballliebe® 和使用大涡模拟计算 Adidas® Telstar® 得出的阻力系数与球速的函数关系。使用 k-ε 湍流模型不会产生阻力危机状态,因为该模型假定在所有速度下都存在湍流边界层。然而,从 Adidas® Fussballliebe® 的初步大涡模拟(LES)来看,预计阻力危机将在较低的速度下发生,这将导致球体在层流边界层分离减缓其速度之前,会在更长的速度范围内保持其速度。高速时阻力系数较高的部分原因是表面粗糙度,但即使考虑到两种球的粗糙度,Adidas® Fussballliebe® 的阻力系数似乎也略高于 Adidas® Telstar®。

分别使用大涡模拟和 k-ε 湍流模型计算的 Adidas® Telstar®(蓝色线)和 Adidas® Fussballliebe®(绿色线)阻力系数与球速的函数关系。
球体材料
Adidas® Telstar® 的一个突出特性是它的弹性。在标准气压下,这款足球的弹性较其前代产品更为出色,也就是说当足球被踢出时,球的移动速度会更快,以热量形式散失的能量更少。Adidas® Fussballliebe® 的弹性更为显著(尽管这一差异只是踢球时的个人主观感觉)。
总之,我们应该期待一些精彩的进球,包括像罗伯托·卡洛斯那样经典的 35 米以外的精彩进球!Ronaldo 的任意球也值得期待,他对 Adidas® Fussballliebe® 的掌握可能比本届比赛的其他大多数球员都要好。
敬请期待
对 Adidas® Telstar® 和 Adidas® Fussballliebe® 的完整研究应包括 CAD 模型中的表面纹理(表面微观结构),这或许会被用于大涡模拟中计算阻力系数与球速函数的精确曲线。此外,还应模拟球的不同部位迎风飞行的情况,以获得阻力系数的自然变化。但目前我们只做了一两天的研究,因为这纯粹为了好玩和满足我们的好奇心。
请保持关注,在完成这项研究所有必要的分析和计算后,我们将公布 Adidas® Fussballliebe® 阻力系数与球速的函数关系以及更多结果!
编者注:本博客更新于 2024 年 6 月 18 日,文中显示为最新结果。
扩展阅读
- 点击下方链接,阅读有关足球空气动力学的其他博客:
 比赛用球
比赛用球
Adidas、Al Rihla 和 Fussballliebe 是 adidas AG 的注册商标。Jabulani、Teamgeist 和 Telstar 是 adidas International Marketing B.V. 的注册商标。
Nike 是耐克公司的注册商标。
FIFA World Cup 是国际足球协会联合会的注册商标。
COMSOL AB 及其子公司和产品与上述任何商标所有者均无关联、未得到其认可、未得到其赞助或支持。
如果说有一个数字可以统治所有的数学和科学,那就是圆周率。π 这个小小的符号有着悠久的历史,可以追溯到数千年以前。从对圆进行粗略近似的古代文明,到计算万亿位数的现代超级计算机,圆周率一直吸引着数学家和好奇者的想象力。这篇博客,我们将通过COMSOL Multiphysics®仿真软件提供的功能,以一种有趣和流行的方法来计算圆周率。
历史上对圆周率的近似计算
已知最早的圆周率近似值出现在古代文明中。巴比伦的数学家将圆周率近似为 3,这个数值在当时的建筑工程中是合理的,后来又被精确为 3.1251。埃及的数学家和印度的学者分别通过比较圆形和八边形的面积2 ,和通过巨量的计算3得出了近似的数值。包括阿基米德在内的一些希腊学者利用几何方法将圆周率的近似值精确到 3 个数量级以内4,使圆周率的计算取得了重大突破。

左图:Domenico Fetti 于 1620 年创作的 Archimedes Thoughtful(又名:Portrait of a Scholar)。图片属于公有领域,通过 Wikimedia Commons 共享。右图:Leonardo Fibonacci 的肖像。图片属于公有领域,通过 Wikimedia Commons 共享。
{kind=link}
{kind=link}
如今我们普遍使用的 3.14 近似值来自中国数学家刘徽,他提出这个近似值的目的是为了实用5。圆周率计算的后续发展涉及无穷级数估算和三角关系的利用。数学家们利用微积分推导出了无穷级数,可用于计算高精度的圆周率,其中 Fibonacci 和 Al-Khwarizmi 做出了重要贡献。
这些发展为我们使用的现代方法奠定了基础,包括计算机中使用的算法,即通过先进的数学工具和计算能力计算万亿位数的算法,以极高的精度计算圆周率。一些著名的计算方法包括 Chudnovsky 算法、Gauss–Legendre 算法、Machin 公式,以及 Monte Carlo(蒙特卡罗)方法。
通俗易懂的蒙特卡罗方法
蒙特卡罗方法是一种依靠随机抽样来估计数值结果的计算技术,特别适用于包含大量变量的问题。对于这种情况,可以利用内在的随机性来解决确定性问题。想象这样一个场景,你正在为一场聚会计算需要订购多少个披萨。这里的确定性问题是计算每个人要吃多少片披萨。与其询问每个人要吃多少片披萨,然后求和得出结果(这对一个大型聚会来说可能相当麻烦),不如随机挑选几个朋友,询问他们要吃多少片披萨,然后求平均值来解决问题。这有点像蒙特卡罗方法,即使用随机样本来估计一个值。蒙特卡洛法被广泛用于模拟复杂现象,如流体、统计力学、生物化学、密码学、社会学和心理学。
这种思维可以扩展到现在流行的一种有趣的估计圆周率的方法。这种方法是在一个正方形内随机放置一些点,然后计算有多少点位于正方形内切圆内。圆内的点数与总点数之比可以用来近似计算圆周率。由于内嵌在边长为 2r 的正方形中的圆的面积为 πr² ,而正方形的面积为 (2r)² = 4r² ,因此它们的面积之比为 π/4。也就是说一个点落在圆内的概率是 π/4。因此,如果我们将圆内点数与总点数之比乘以 4,就可以得到 π 的估计值。这是因为随着点数的增加,比率会趋近于实际值 π/4。

估计圆周率的基础。
在 COMSOL Multiphysics® 中使用蒙特卡罗方法估算圆周率
为了进行这个简单的蒙特卡罗模拟,我们将使用 数学粒子追踪 接口。在 COMSOL Multiphysics® 软件平台中添加粒子追踪模块就可以使用这个接口。虽然该模块的用户通常不会使用它来随机生成点,但出于可视化和美观的目的,我们决定在这个有趣的示例中使用它。
现在,我们来举例说明。一些粒子被随机释放到一个正方形区域并保持静止。对位于正方形内切圆区域内的粒子数量进行追踪,来获取圆周率的实时估计值。可以看到,随着点数的增加,估计值(蓝色实线)逐渐接近真实值(绿色虚线)。值得注意的是,估计值的精确度并不随点的数量呈线性变化。蒙特卡罗近似的统计误差通常与 1/sqrt(n) 成正比。这意味着,要将误差减少 10 倍,通常需要将点数增加 100 倍。
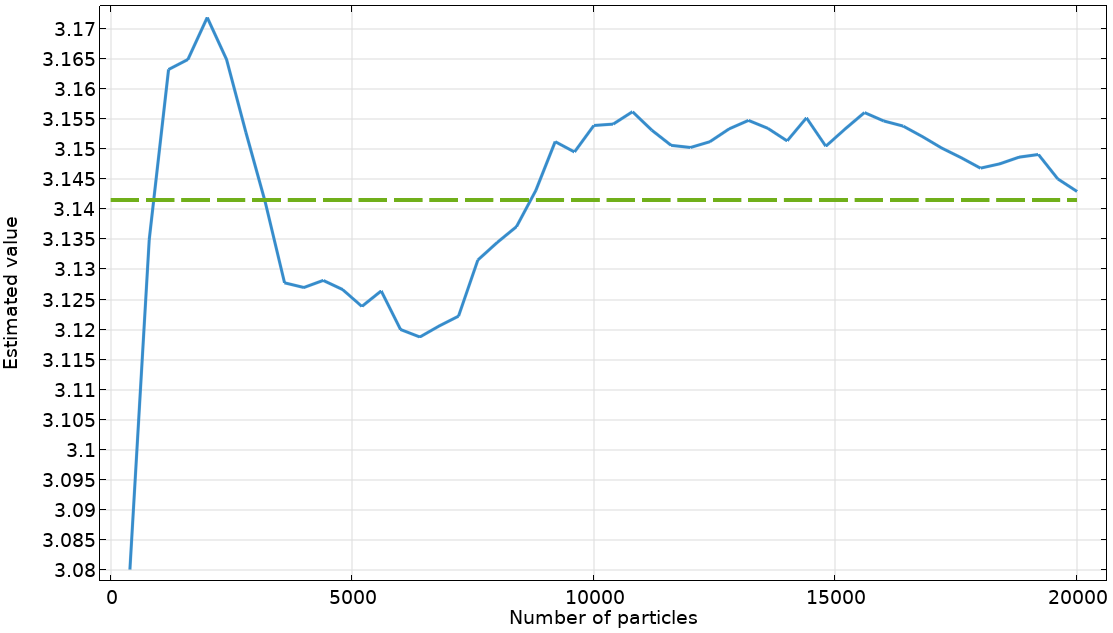
在随机放置的点数不断增加的情况下,圆周率的实时估计值(蓝色实线)与真实值(绿色虚线)的比较。
接下来,我们使用 COMSOL Multiphysics® 中的 App 开发器创建了一个基于多物理场仿真模型的仿真 App。在这个 App 中,我们可以使用一个滑块改变点的数量,并获得圆周率在不同点数的估计值以及与真实值的误差。该 App 还将随机放置的点可视化,并通过颜色协调来识别位于圆内的点。
使用仿真App根据不同的点数估算圆周率,并获得对结果的可视化解读。
下一步
欢迎从 COMSOL 案例库下载包含 App 设计和相关文件的 MPH 文件:使用蒙特卡洛法估算圆周率值。
- 更多使用蒙特卡罗方法的模型:
- 演示如何直接对 Ishigami 函数进行蒙特卡罗模拟的示例
- 使用蒙特卡洛法评估自由分子流动体系中简单涡轮分子泵性能的模型
- 使用蒙特卡洛法计算通过 S 形弯曲几何结构的传输概率的模型
- 有关 App 开发器的信息:
- 阅读博客:App 开发器让更多人受益于多物理场仿真,了解 COMSOL 用户对 App 开发器的使用评价。
- 阅读用户案例:借助仿真 App 预测水果保质期,了解一款基于多物理场仿真模型开发的智能手机应用程序
- 阅读用户案例:使用仿真 App 进行远程实验课程教学,了解一位大学教授如何使用仿真 App 进行教学
参考文献
- P. Beckmann, A History of π. New York: St. Martin’s Press, 1971
- C. Rossi, Architecture and Mathematics in Ancient Egypt. Cambridge University Press, 2004
- C. Krishna, A profile of Indian culture. Indian Book Company, 1975
- D.B. Damini & A. Dhar, How Archimedes showed that pi is approximately equal to 22/7. arXiv e-prints, 2020
- Y. Lam & T.S. Ang, Circle measurements in ancient China, Historia Mathematica, 1986
暖通空调系统的作用不仅仅是在室外温度升高时提供平稳的冷空气。在这类系统中,空气通过过滤器流动,从而获得清洁的空气。清洁的空气至关重要,建模和仿真有助于深入理解空气通过过滤器时的行为背后的物理原理。
模拟空气过滤器
暖通空调系统中的过滤器依靠一种材料,通常是玻璃纤维或棉叠片来过滤空气并捕获灰尘、花粉和细菌等微粒。这些材料会对气流产生影响,在捕获不需要的微粒的同时使过滤后的空气流过。对这些装置及其引起的湍流进行模拟,可以确定使用不同的材料作为过滤器时的效果,帮助设计人员在投资实际实验之前缩小材料选择范围。
在这篇博客中,我们将以常见的空气过滤器几何结构(如下图所示)为例来阐述。
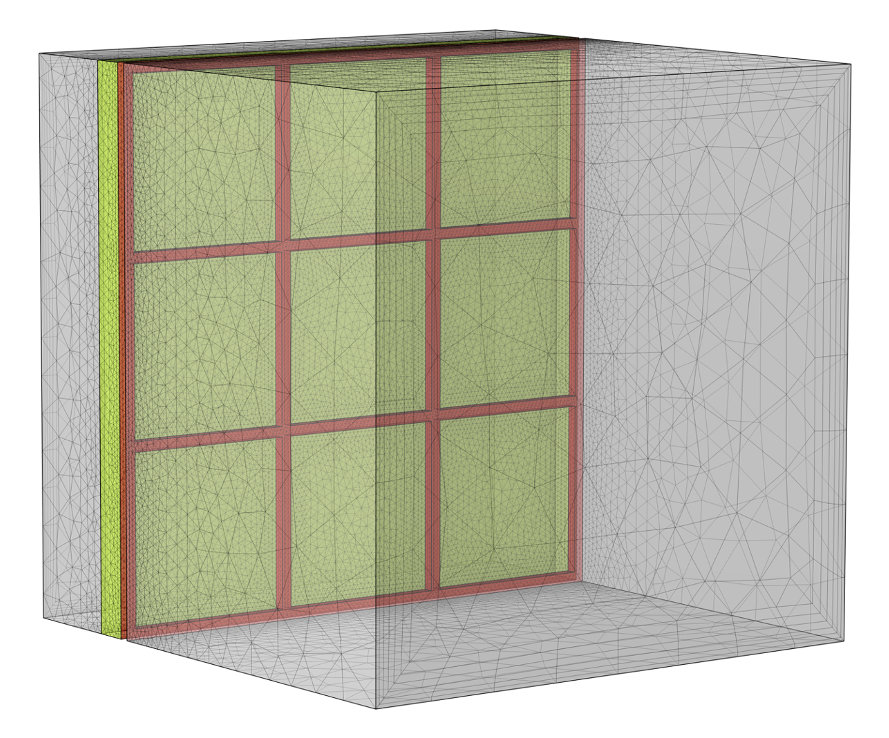
模型几何结构显示了入口和较长的出口,以及二者中间的过滤器。过滤器几何结构的网格比开放流体域的网格划分更加密集。
CFD 模块是 COMSOL Multiphysics® 软件的附加产品之一,它提供在开放域和多孔域中创建雷诺平均纳维-斯托克斯(RANS)湍流模型的功能。在本文的示例中,空气过滤器被模拟为一个高多孔域,其 90% 的材料充满了直径为 0.1mm 的圆柱形小孔。空气过滤器的支架由一个无滑移壁的框架表示。在此示例中,我们采用了 湍流 k-ω 接口,因为该接口对于包括无滑移壁在内的多壁模型计算非常精确。(有关模型设置的详细介绍,请参阅模型文档,您可以通过文末的按钮访问该文档)。
评估结果
通过求解模型,可以直观地看到空气向过滤器移动、通过过滤器以及通过过滤器时湍流、速度和压力的变化。从空气向过滤器移动(下图中为紫色)时开始计算。当空气通过过滤器时,间隙速度增加(尽管多孔平均速度保持不变),从而导致湍流动能增加。此外,由于速度增加以及壁面数量较多,导致摩擦和压力损失增加,压力突然下降。当空气离开过滤器时,由于过滤器的框架阻止了空气的自由流动,因此造成了下游的空气湍流。
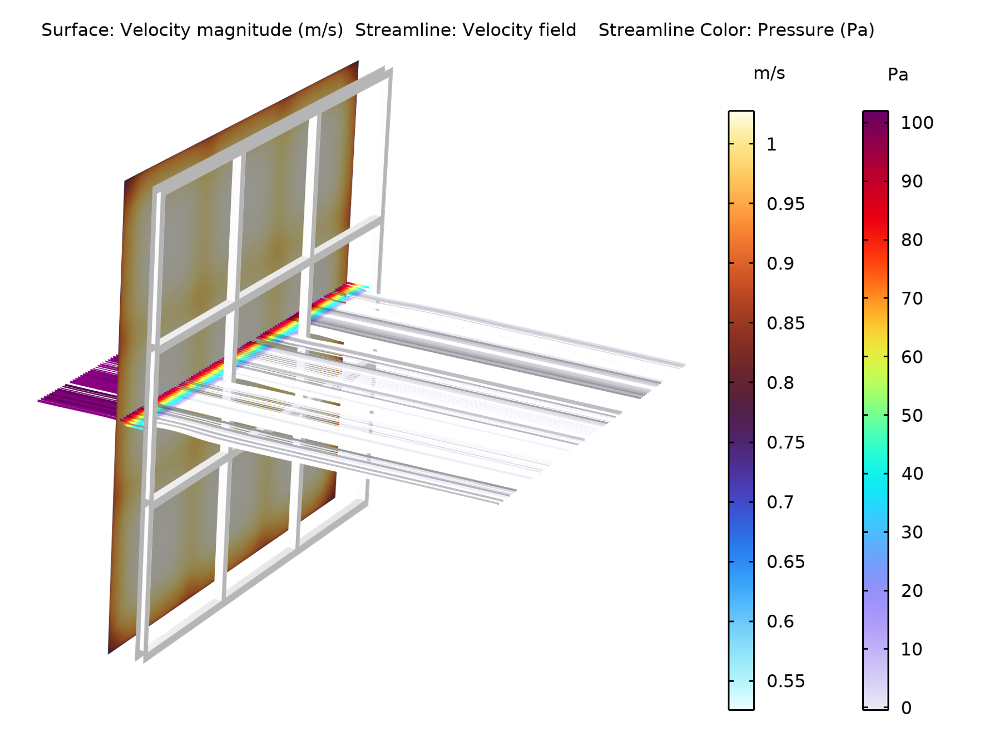
通过多孔空气过滤器的流体压力明显降低。
空气通过过滤器时的可视化效果可以用来判断过滤器是否能去除空气中的污染物。为了验证这一结论,我们可以用不同的切片图来评估解。本例中的切片图显示,多孔空气过滤器和框架对空气流速的影响最大,空气流速在通过尾流区时趋于均匀。测量湍流动能的切片图显示,湍流动能在过滤器内明显达到峰值,在无滑移壁上达到典型值。
总的来说,该模型表明过滤器内的压力下降,湍流急剧增加,造成垂直于主要流动方向的速度扰动,从而也增加了颗粒与孔壁碰撞并停留在孔壁的概率。换句话说,湍流增加提供了过滤不需要的微粒所需的混合,否则这些微粒将不受干扰地流过孔隙。
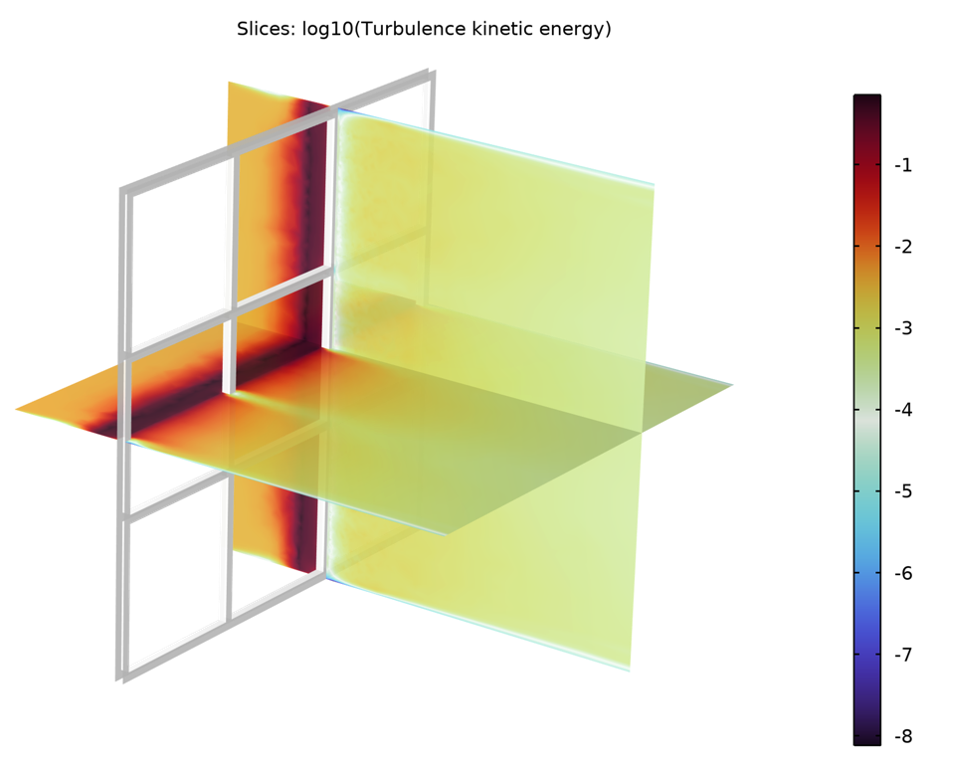
显示湍流动能的切片图。多孔空气过滤器中的湍流水平明显高于自由流或管壁附近。
动手尝试
想自己动手创建文中示例的空气滤清器的模型吗?COMSOL 案例库中提供了相关的 MPH 文件和详细分步说明,点击下方按钮获取案例模型:
扩展阅读
在这篇博客中,我们重点讨论了空气过滤器中的湍流。实际上,湍流模型也可用于描述室内气候、通风和空调系统。阅读下列 COMSOL 博客,探索更多涉及湍流的仿真方案In
热声发动机通过输入的热能产生声能。与往复式发动机和燃气涡轮机等常用发动机相比,热声发动机不含活动部件,因此结构非常简单。这篇博客,我们将介绍如何使用 热黏性声学 接口模拟热声发动机的工作原理。热黏性声学接口是 COMSOL Multiphysics® 软件中的一个功能强大的接口,用于模拟流体线性化行为。
热声发动机的工作原理
150 多年前,Pieter Rijke 教授发现并报道了一个有趣的现象,可以被看作是热声学的开创性工作。他将金属丝纱布放入一个垂直放置的玻璃圆筒管中,然后用火从底部加热纱布。熄火后,他观察到圆筒在一段时间内持续发出声音(参考文献 1)。这个装置现在被称为 Rijke管,因此有些人可能看到过它被作为解释共振现象的一个例子。然而,抛开共振不谈,声音是如何产生的呢?
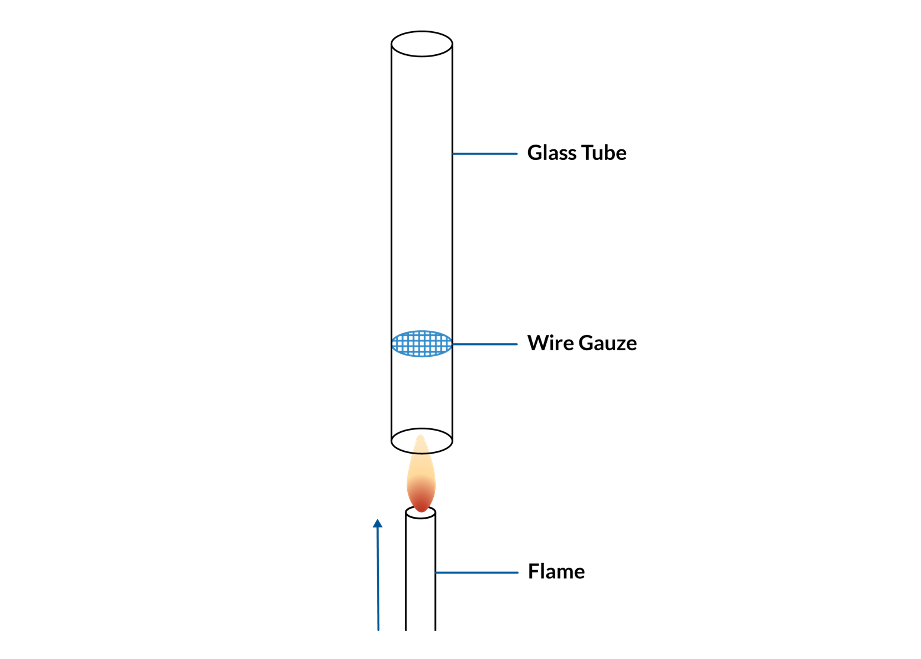
Rijke 管装置。
奥秘在于温度变化与管内流体运动之间的相互作用:加热的金属丝网引起空气自然对流,使空气在管道中稳定流动;金属丝网上方的空气温度要高于金属丝网下方的空气温度。在管内的半驻波声共振中,空气将在声周期的不同时间向两个方向流经金属丝网。当空气流过金属丝网时会被加热。由于金属丝网下方的空气比上方的空气更冷,因此当气流向上而不是向下流动时,会传递更多的热量。为了获得持续的声场,热量释放需要与压力场相位一致,这样当声压为正时,流体就会被加热。在驻波中,导致加热的速度场与压力场不同步。然而,由于金属丝网周围黏性边界层的影响,热量释放比速度场滞后。这种相位延迟导致热量释放与压力场部分同相,从而产生持续共振。如果将管横过来,对流停止,共振将不再持续。如果将管翻转过来,当声压为负时,热量传递将最大,因此声场将减弱而不是持续。
这是热能和声能之间能量转换的一个例子。事实上,整个装置展示了热声发动机的工作原理。
热声发动机有一个封闭的管状通道,声音可以在其中传播。通道内有一个热交换器,用于加热或冷却工作流体。热声发动机使用驻波或行波,而 Rijke 管仅使用驻波。由于压力和流体位移之间存在相位延迟,行波发动机有望实现比驻波发动机更好的性能。在这篇博客中,我们将主要介绍行波发动机的模型。
我们来思考一下使用行波的热声发动机的原理。要了解波是如何起作用的,请看下图中小块流体的运动。声波是纵波,因此如果高压行波从左侧传来,小块流体就会被推向右侧。同样,当来自左侧的低压波到达流体块时,它会被拉向左侧。
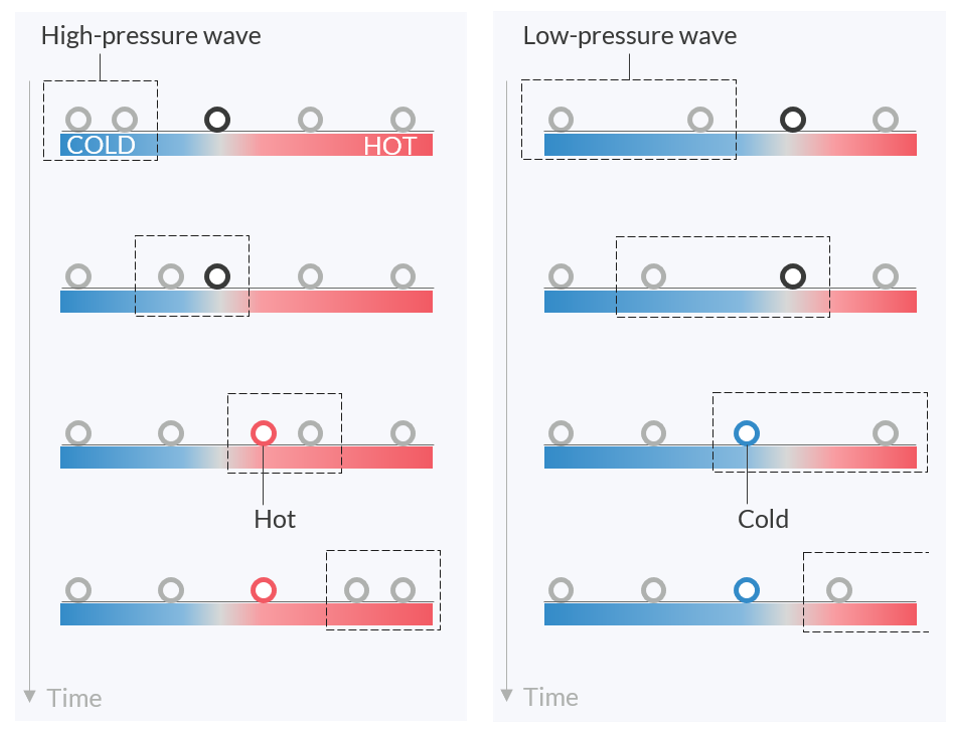
小块流体如何在来自左侧的行波下移动。用虚线框表示波的假想区域。在邻近板块有适当温度梯度的情况下,如果受到高压波的推动,流体块总是会移动到较热的区域,而如果受到低压波的牵引,流体块则会移动到较冷的区域。
假设沿波的行进路线在管中放置一块加热板。如果加热板的右端,而左端保持中等温度,那么加热板中就会出现温度梯度。当流体块向右移动时,温度梯度会加热块;当流体块向左移动时,温度梯度会吸收流体块的热量。由于流体块向右移动时压力最大,流体块的加热会将压力推至最大值。同样,流体块向左移动时吸收的热量也会降低最小气压。这些周期性的温度起伏使流体块的移动同步,最终增加了波的振幅。所有流体块像链条一样共同传递压力波,并通过热量交换为压力波增加能量。请注意,板中的温度梯度应与波的传播方向一致,否则波将会直接衰减。
如果你想知道是否存在一种与发动机循环相反的装置,答案是肯定的。这种系统被称为 热声热泵 或 热声制冷机,它可以利用声波移动热量。工作原理很简单:当高压波到达块时,块被压缩,温度随之升高,块开始向右移动的同时向邻近物体散热。相反,在低压波的作用下,块会吸收热量并向左移动。
这里给出的解释仅供参考,并不包含热声发动机的所有细节。如果想了解有关热声发动机的更多详细信息,请参阅参考文献 2。
热声仿真中的线性方程
在创建新的仿真时,考虑使用哪些方程和哪个接口是合适的始终非常重要。就我们现在介绍的仿真示例而言,使用声学模块来模拟热声振荡似乎是合理的,因为这个现象与声波有关。由于这种现象在学术领域被称为 热声学,因此 热黏性声学 接口似乎是一个不错的选择。让我们看一下这个接口的方程和功能,以验证我们的选择。
在时域分析中,热黏性声学 接口使用以下方程:
式中, ,
,  ,
,  , 和
, 和  分别表示密度、速度、温度和压力。下标
分别表示密度、速度、温度和压力。下标  表示该值属于背景平均流,而带有下标 的变量表示声学扰动。热黏性声学 接口的控制方程是根据纳维-斯托克斯方程(流体运动的精确方程)推导出来的,并基于以下假设:模拟中可以忽略每一个二阶扰动项,并且平均背景流的速度为零 (
表示该值属于背景平均流,而带有下标 的变量表示声学扰动。热黏性声学 接口的控制方程是根据纳维-斯托克斯方程(流体运动的精确方程)推导出来的,并基于以下假设:模拟中可以忽略每一个二阶扰动项,并且平均背景流的速度为零 ( )。
)。
必须注意被忽略的非线性因素,以及线性化方程是否涵盖我们感兴趣的现象。在热声发动机中,流体与热交换器之间的热交换由扩散项  表示,声振荡引起的热传递由线性化平流项
表示,声振荡引起的热传递由线性化平流项  表示。由高压平流项 输送的冷流体在热交换器中被加热 ,能量通过第三个方程递增。这些项描述了系统中重要的热传递原理,因此线性方程非常适合模拟发动机。
表示。由高压平流项 输送的冷流体在热交换器中被加热 ,能量通过第三个方程递增。这些项描述了系统中重要的热传递原理,因此线性方程非常适合模拟发动机。
另外还需要注意,没有表示时变温度场与振荡速度  耦合的平流项。这种耦合表示法将显示振荡引起的瞬态温度场的传输。平流项对于热泵模拟非常重要,因为平衡时的温度梯度是由振荡决定的,而不是 优先 的。在这种情况下,我们可以使用 非线性热黏性声学贡献 功能,它允许模型在 热黏性声学,瞬态 接口中将非线性项考虑在内。模拟非线性可能代价高,因此非线性功能仅被添加在相关域中。
耦合的平流项。这种耦合表示法将显示振荡引起的瞬态温度场的传输。平流项对于热泵模拟非常重要,因为平衡时的温度梯度是由振荡决定的,而不是 优先 的。在这种情况下,我们可以使用 非线性热黏性声学贡献 功能,它允许模型在 热黏性声学,瞬态 接口中将非线性项考虑在内。模拟非线性可能代价高,因此非线性功能仅被添加在相关域中。
在 COMSOL Multiphysics® 中进行热声仿真
到目前为止,我们已经介绍了热声发动机的基本工作原理和相关的模拟控制方程,下面我们就开始建立模型。您可以在COMSOL 案例库中访问文中示例的模型文件。如上一节所述,我们将使用 热黏性声学 接口来建立行波热声发动机模型。由于稳态背景温度场并不均匀,因此还要使用 传热 接口。整个研究可分为两个步骤:背景温度场的 稳态步骤 和声场的 瞬态步骤,而不是同时使用两个接口。只需在 热黏性声学模型 节点中将 传热 接口的解设置为平衡温度,就可以实现耦合。
至于 热黏性声学 接口的边界条件,我们应将热交换器壁设置为等温 ( )。这种条件会在压力较高时加热流体温度(由于来自较冷区域的平流,
)。这种条件会在压力较高时加热流体温度(由于来自较冷区域的平流, 小于零),并在压力较低时冷却流体( 大于零)。
小于零),并在压力较低时冷却流体( 大于零)。
示例 1:简单环
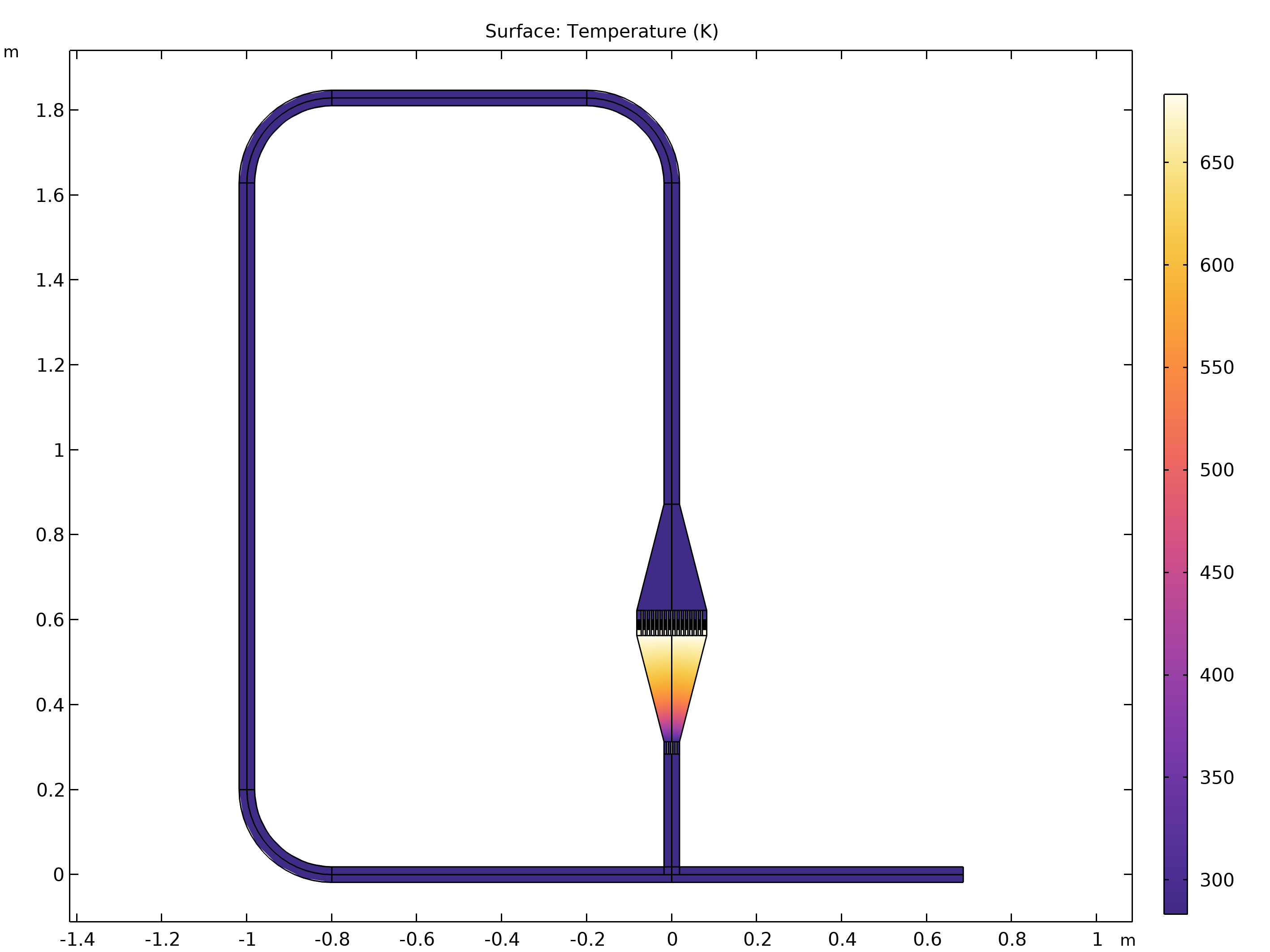
首先,我们将模拟一个由简单环组成的发动机。它的右侧通道中有一个热交换器,整个通道形成一个闭合回路。稳态温度如下图所示。热交换器下部区域的温度梯度非常醒目,但我们关注的是热交换器小间隙中的温度梯度。
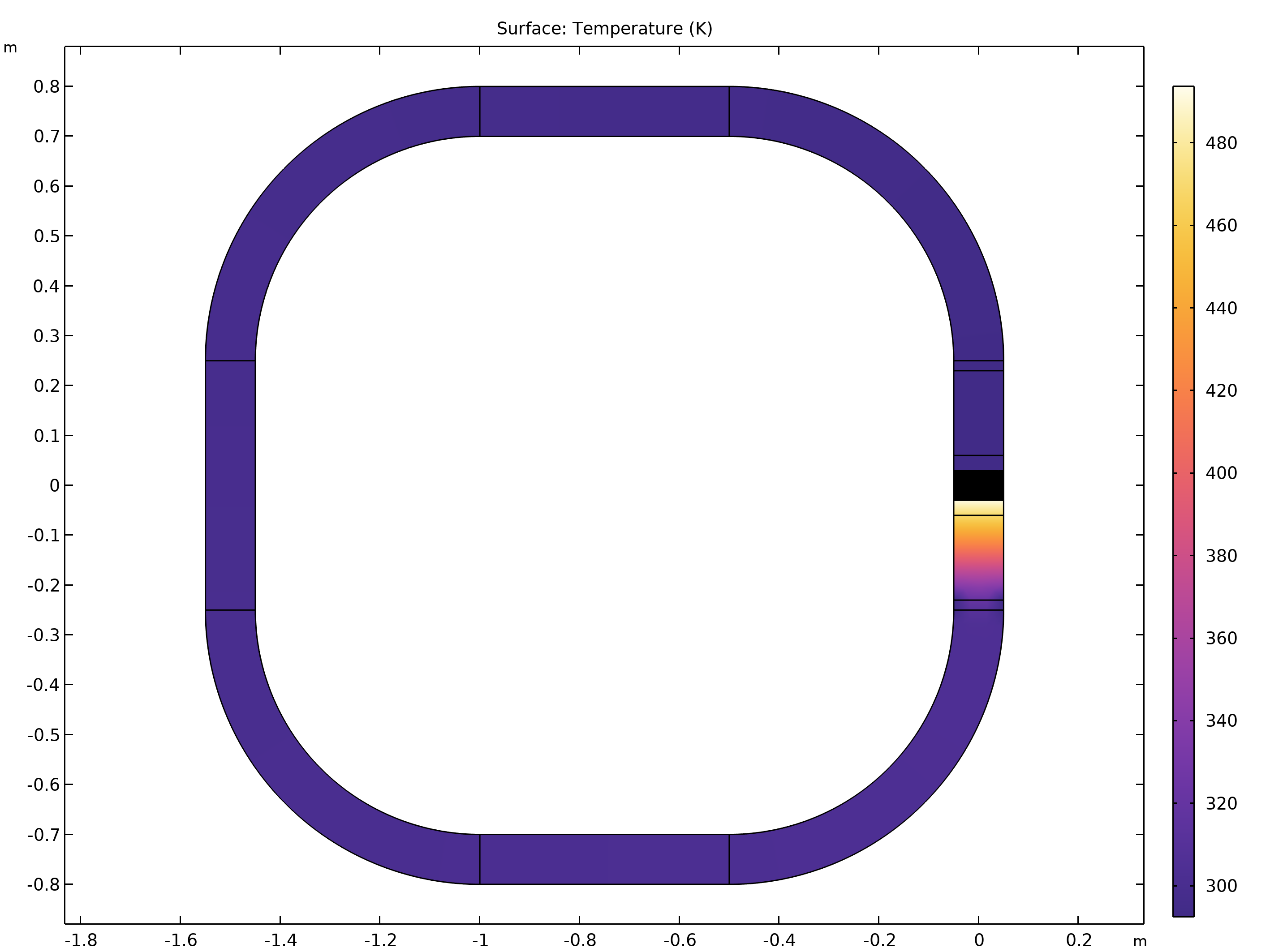
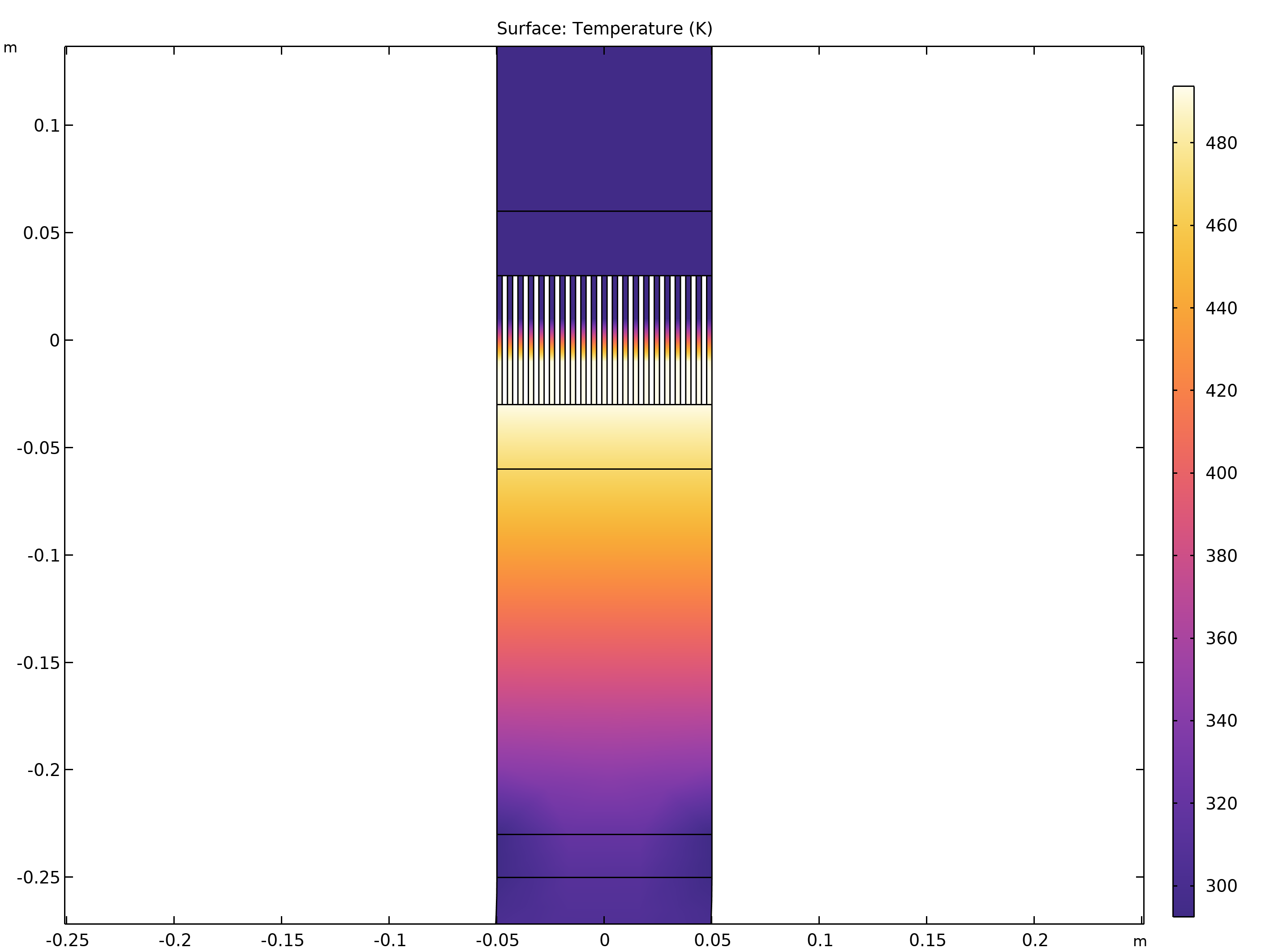
简单环形发动机的平衡温度(左:整个系统;右:热交换器特写)。热交换器中狭窄通道的底部端在 493 K 的温度下被加热。
在 瞬态 研究步骤中,驻波被作为压力的初始条件,以便触发环路内部的振荡。随着模拟的继续,振幅不断增大,这可通过 点探针 功能获取(如下图所示)。很明显,振荡不断增强,意味着热能已转化为声能。
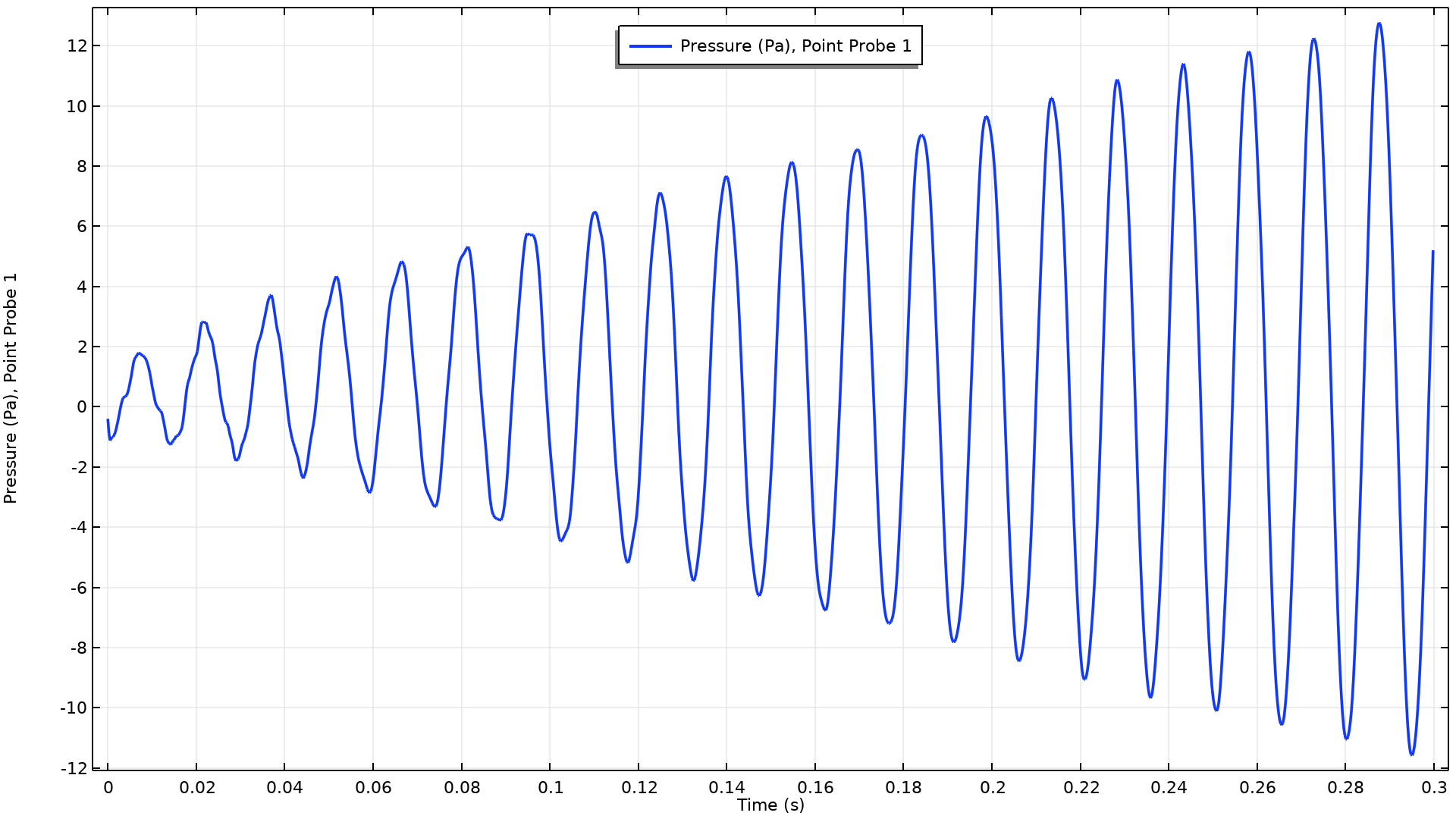
设置 点探针 功能是为了追踪发动机内的压力。压力数据取自热交换器中的一个点,该点靠近作为初始压力分布的驻波的压力节点。
那么,发动机内的压力是怎样的呢?下面三幅图分别显示了 t = 0.281 s、0.285 s 和 0.289 s 时的压力分布。t = 0 s 时为驻波,但经过一小段时间后,压力分布开始沿顺时针方向旋转。波的传播方向与热交换器中的温度梯度相同,初始驻波的逆时针分量由于缺乏能量供应而减弱。有趣的是,逆时针方向的波的激发可以通过在模拟过程中翻转温度梯度的方向来模拟。在模型文件中,稳态 研究步骤在 t = 0.3 s 时再次计算反转后的温度曲线,瞬态研究 反映了自那时起平衡温度的变化。顺时针方向的波一直保持到大约 t = 0.6 s。随后,发动机中出现了类似驻波的分布,波最终沿逆时针方向传播。
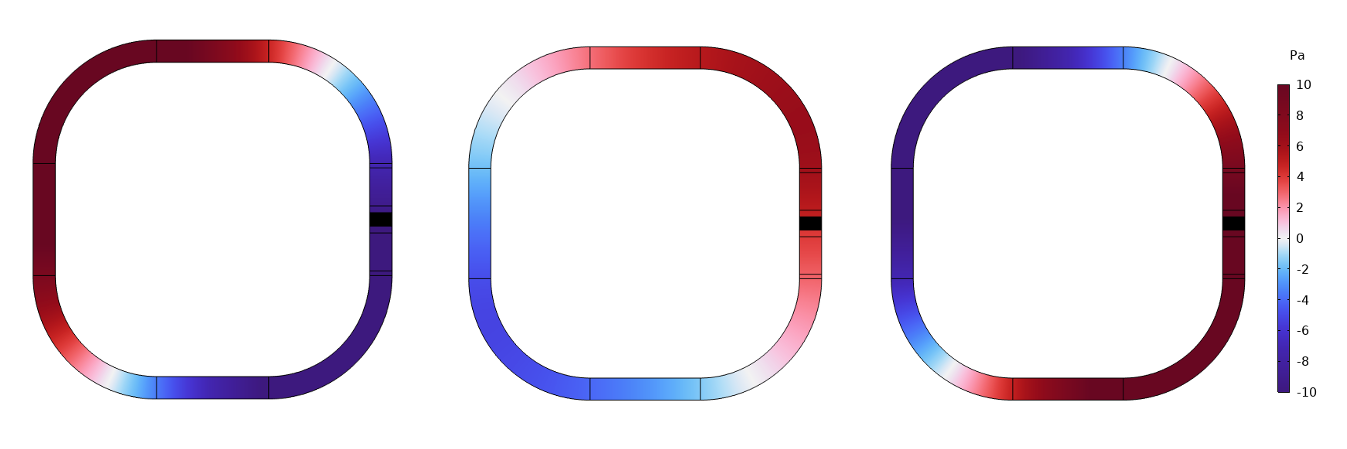
压力分布记录(左:t = 0.281 s;中:t = 0.285 s;右:t = 0.289 s)。由于前面讨论的热声效应,高压区和低压区均沿顺时针方向移动。
示例 2:带接头的环
除简单环外,我们再来看看另一种配置。下图显示了下一个具有复杂几何结构的模型示例。该几何结构模仿了参考文献 3 中的实验装置。该模型是二维的并经过简化,与参考文献中讨论的热交换器的水力直径相同。右下角的分支管道(称为 接头)是为将来提取声能而添加的。与示例 1 一样,该环路用在发动机中将热能转换为声能,但是在这个示例中,部分能量可以在接头处提取。
带接头的模型中的平衡温度。该几何结构模仿了参考文献 3 中的实验装置。
发动机内的瞬时压力分布如下图所示。在弧长等于 3.6 m时,压力急剧下降,这是由热交换器小间隙中的黏性阻力引起的。值得注意的是,压力的振幅与位置密切相关。这是由于模型的复杂性造成的,例如发动机中持续存在的黏性阻力和驻波分量。图中还绘制了每个位置上绝对压力的时间最大值,标记为 max(|p|)。请注意,尽管振幅看起来有点大,但该模拟假设没有湍流,任何扰动都是线性的。在对空间最大值进行无量纲化处理后,近似振幅 max(|p|) 的分布与参考文献 3 中的实验和分析数据非常吻合。
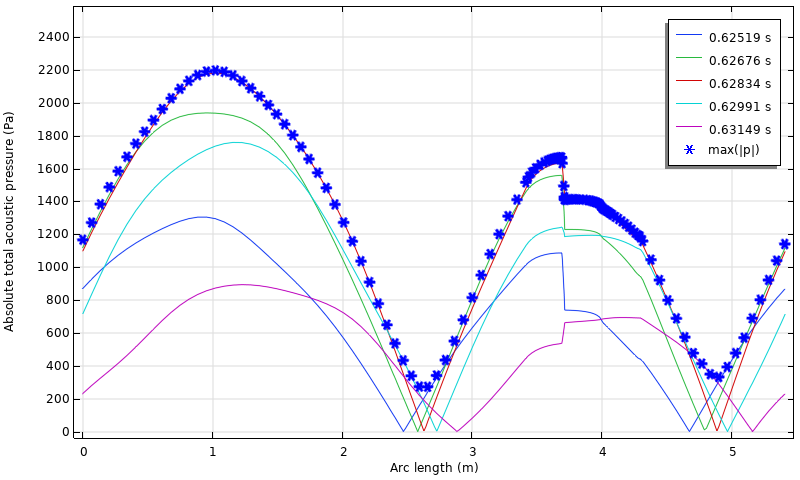
沿环的瞬时压力分布以及由状态变量计算的近似振幅 max(|p|)。
查看其他示例
自 Rijke 教授演示了热声现象以来,人们对热声学的认识有了显著提高,目前正在积极研究其在能源设备中的应用。在这篇博客中,我们介绍了如何使用 热黏性声学 接口对热声发动机进行模拟,并对发动机的有趣特性进行了可视化展示。
COMSOL 案例库包含许多跨物理学科的模型。下面是与热声学有关的两个模型:
- 热声发动机简化模型, 这是一个驻波热声发动机模型。有多个模型文件,可对使用 热黏性声学,瞬态 接口的线性扰动方法和 非等温流动 多物理场接口的完全非线性方法建立同一模型进行比较。后一种方法在求解纳维-斯托克斯方程时考虑了非线性因素,但代价是计算时间有所增加。
- 热声发动机和热泵, 这是一个驻波热泵模型。与热声发动机不同,热声热泵的仿真需要计算非线性平流项
 ,因为温度会因热传导效应而不断降低。在模型中,非线性热黏性声学贡献 节点被添加到 热黏性声学 接口中,以考虑非线性因素。模型还使用了 热黏性声学-热扰动边界 耦合,这是 6.2 版本中的一项新功能。该耦合用于模拟振荡流体与通道中的固体板之间的热交换,因为固体温度会随着热量的泵送而不断降低。
,因为温度会因热传导效应而不断降低。在模型中,非线性热黏性声学贡献 节点被添加到 热黏性声学 接口中,以考虑非线性因素。模型还使用了 热黏性声学-热扰动边界 耦合,这是 6.2 版本中的一项新功能。该耦合用于模拟振荡流体与通道中的固体板之间的热交换,因为固体温度会随着热量的泵送而不断降低。
参考文献
- P.L. Rijke, “LXXI. Notice of a new method of causing a vibration of the air contained in a tube open at both ends,” The London, Edinburgh, and Dublin Philosophical Magazine and Journal of Science, vol. 17, no. 116, 419–422, 1859; https://doi.org/10.1080/14786445908642701
- G.W. Swift, Thermoacoustics: A Unifying Perspective for Some Engines and Refrigerators, Springer, 2017; https://doi.org/10.1007/978-3-319-66933-5
- M. McGaughy et al., “A Traveling Wave Thermoacoustic Engine—Design and Test,” Letters Dyn. Sys. Control, vol. 1, no. 3, July 2021; https://doi.org/10.1115/1.4049528
在天气晴朗、温度适宜的季节,大自然会吸引追求冒险的徒步旅行者和快乐的露营者。可是,有植被的地方也有等待寻找下一个目标的蚊子。露营者该怎么办呢?只要蚊子觉得捕蚊器比附近的血源更有吸引力,捕蚊器就有效。今天我们来看一个有趣的仿真案例,即通过基于方程建模的方法来看看捕蚊器是否能让露营者的森林小屋保持舒适无蚊,或者蚊虫是否会扼杀露营的乐趣。
吸引蚊子的物质:二氧化碳和乳酸
为什么雌性蚊子更容易被人类和动物吸引?原因有很多。首先只有雌性蚊子才会吸血,因为它们需要血液中的蛋白质来产卵。根据 新加坡国家环境局的说法,不同种类的蚊子对某些引诱剂更敏感,这也是许多商用捕蚊器会将不同的引诱剂结合使用的原因。
视觉线索(如运动)和热线索(如体温)在吸引雌蚊进入血源方面起到一定的作用,但很大一部分因素是来自气味。蚊子更倾向于被二氧化碳、乳酸(人类汗液中的一种化合物)和某些信息素等物质吸引。在捕蚊器中使用这些线索作为诱饵有助于提高捕蚊器的效果。

叶子上的蚊子。照片由Syed Ali拍摄,来自Unsplash。
有了对蚊子难以抗拒的因素的基本了解,再加上装备的基于方程建模和粒子追踪功能的仿真软件,让我们来看一个简单的捕蚊器在吸引这些小家伙方面表现如何。
模拟小屋中的捕蚊器
我们将利用 COMSOL Multiphysics® 软件的两个功能来进行基于方程的建模:一个是选择 数学 接口,另一个是解释用户添加的数学方程,以及生成数值模型时将其纳入的特征。
在制作捕蚊器模型时,需要考虑用什么数学方程来描述蚊子的飞行。一种方法就是用拉普拉斯方程来描述吸引物的浓度。本文示例中的模型求解的是速度势能的拉普拉斯方程,它被设计成与一般蚊子吸引物的浓度成正比。速度势能代表所有可能吸引蚊子的分子,包括二氧化碳和捕蚊器散发的气味。
幸福的睡眠
为了更直观地理解这个模型场景,让我们把露营者带回来,假设他住在森林中的一间小木屋里。这是一个温暖的夜晚,为了睡得舒服,他决定打开窗户。他在床头安装了一个捕蚊器,认为这应该能保证他的安全。根据制造商的说法,这种捕蚊器应该比真正的血源有超过60%吸引力,所以他选择碰碰运气。
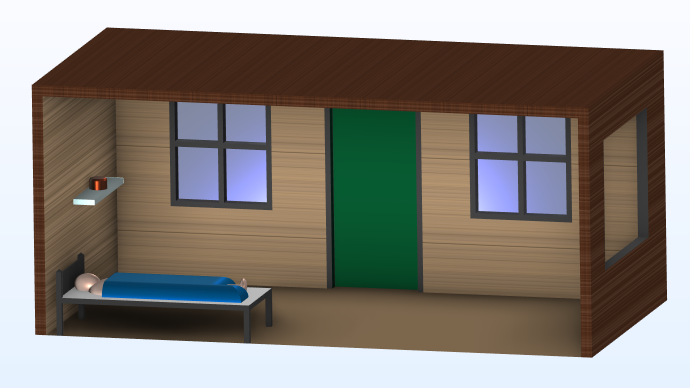
小木屋模型,窗户打开,一个人正在睡觉,床头的架子上放着一个捕蚊器。
啊哦!我们的露营者犯了一个错误:他在睡梦中动来动去。他梦见了第二天早上的远足美景,他不停在动,毯子也在动,导致他的躯干和腿部没有遮挡。接着,一群蚊子从打开的窗户飞进来,它们在找血。这些蚊子要么去找露营者,要么去找捕蚊器。露营者是会平安无事,还是一觉醒来浑身发痒呢?
攻击路径
为了确定蚊子的去向,我们需要在模型中添加一些方程。本例中,我们使用狄利克雷边界条件特征添加了三个边界:打开的窗户、捕蚊器和露营者裸露的皮肤。由于捕蚊器比人的皮肤更有吸引力,我们为捕蚊器和皮肤分配了不同的速度势能,来表示这种对比。
我们还将在示例中使用 COMSOL Multiphysics 的附加产品——粒子追踪模块。当然,使用该模块的用户一般不会模拟蚊子群这样夸张的场景;更典型的例子是模拟代表离子、细胞、水滴、行星或恒星等的粒子。在我们这个有趣的例子中,每个粒子都代表一只蚊子。粒子追踪模块还包括求解用户定义的粒子运动方程的功能,我们在这里用它来解释蚊子在小木屋中的运动。该模型的设置是为了计算有多少粒子在选定的时间内到达某一点——在本例中,就是到达蚊子皮肤和捕蚊器的位置。
我们来看看模拟结果:
蚊子进入房间时的模型。每个黑点代表一只蚊子。红线代表一只蚊子的活动轨迹。
捕蚊器与人类皮肤:蚊子更喜欢哪一种?
建立模型并求解后,我们可以绘制结果图,比较在 150 秒或 2.5 分钟内,有多少蚊子飞到了我们可怜的露营者的皮肤上,以及捕蚊器的情况。如下图所示,随着时间的推移,落在皮肤上的蚊子数量会增加,部分原因是野营者比捕蚊器更靠近打开的窗户。不过,落在诱捕器上的蚊子数量也在增加,并在给定时间的一半时超过了落在皮肤上的蚊子数量。
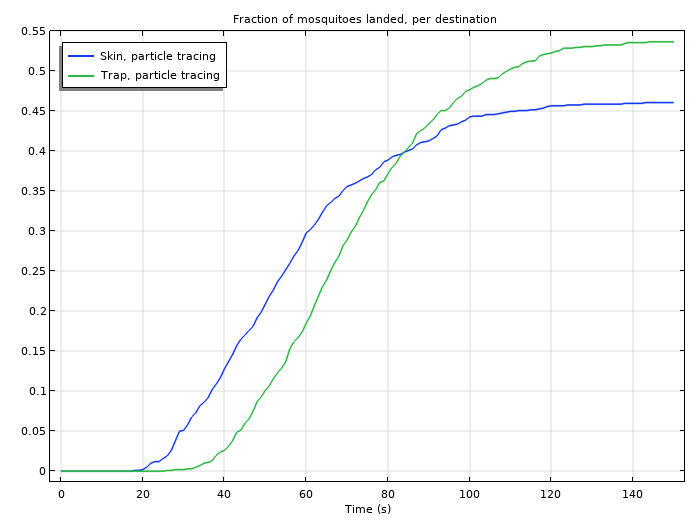
在 150 秒的时间范围内,比较落在皮肤上的蚊子数量和捕蚊器上的数量。
换句话说,他使用捕蚊器比不使用捕蚊器要好,而且(虚构的)制造商对预期性能也是诚实的。利用COMSOL软件基于方程的建模功能,我们能够求解自定义方程,分析蚊子行为与捕蚊器之间的关系,而这一切都不会造成蚊虫叮咬!
更多热门内容
- 利用以下资源继续探索基于方程建模的好处:
- 观看网络研讨会视频,更详细地了解如何使用数学接口设置捕蚊器示例:使用COMSOL®进行基于方程的建模介绍
- 查看以下包含11 部分的自学课程,了解使用COMSOL Multiphysics®进行基于方程的建模, 课程重点介绍了偏微分方程 (PDE):在 COMSOL Multiphysics®中使用偏微分方程建模
- 阅读下列博客,探索其他昆虫的科学行为:
脂质纳米粒(LNP)递送技术被用于病毒疫苗、癌症疗法、镇痛剂和光动力疗法等各种药物应用中。近年来,LNP 技术在 mRNA 疫苗中的应用尤其受到公众的关注。mRNA 疫苗的递送效果取决于 LNP 的尺寸和剂量:小尺寸 LNP 更善于穿透组织,但由于递送产量低,需要较高的剂量。研究人员可以通过反复实验来满足这些要求。然而,来自 Veryst Engineering 的一个研究团队提出,通过仿真指导设计过程将对实验起到补充作用,最终可以节省成本和时间,帮助找到更具创新性的解决方案。
mRNA 疫苗生产:混合与自组装
Veryst Engineering 是一家工程咨询公司,专注于通过仿真进行产品设计、制造工艺和疲劳分析。在 :制药应用的主题演讲中,Veryst 的合伙人 Matthew Hancock 和高级工程师 Joseph Barakak 介绍了 mRNA 疫苗的生产,并分享了如何通过仿真提升纳米药物的设计过程。
“广义上来说,mRNA 疫苗生产是有机相与水相的混合。水相中含有带负电荷的 mRNA,有机相中含有用于封装 mRNA 的脂质。”Barakat 介绍说,“只要有足够的停留和混合时间,这些成分就会混合并进行自组装,自发形成聚集体。这些聚集体,即 LNP 构成了近年来备受公众关注的 mRNA 疫苗。”
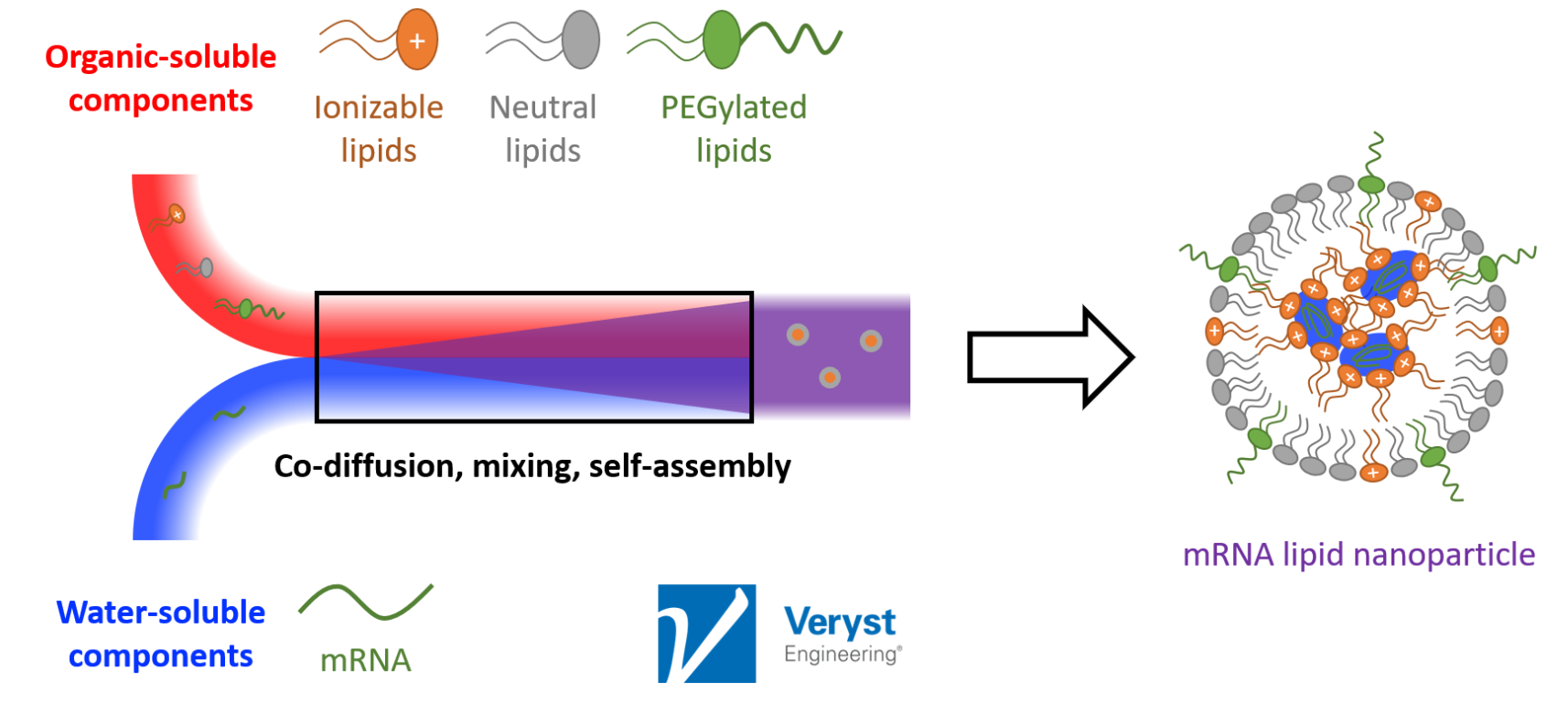
图1.mRNA 疫苗的详细生产示意图。图片由 Veryst Engineering 提供。
Barakak 解释说,有两种常见的方法可以将各种成分混合在一起形成聚集体。在大规模的药物生产制造中,使用湍流方式,即通过大漩涡分解成越来越小的漩涡的级联快速混合提高分子扩散的效果。对于小批量药物生产,如药物发明或精准医学开发中,则采用微流控设备,因为它的流体体积小。“微流控设备面临的挑战是……,要实现高效、快速的混合,就不能利用湍流混合,但湍流混合又非常高效。” Barakak 说道。此外,即使这种设备很小,分子扩散速度通常来说也仍然太慢,无法达到理想的混合速度。不过,有多种主动和被动形式的混合,包括混沌混合都适合用于微流控设备。
首先且重要的是,要理解哪种混合方式最适合生产 mRNA 疫苗。在生产疫苗时,还需要克服更多的挑战。
LNP 生产面临的挑战
生产 mRNA 疫苗是一项艰巨的任务。LNP 的尺寸(直接影响这些纳米药物的疗效)在很大程度上取决于混合时间。Hancock 说:“一般来说,混合时间越长,脂质聚集的时间就越长,从而产生更大的聚集体和更不均匀的尺寸分布;而混合时间越短,纳米颗粒越小,但产量越低。

图2.两种瓶装 mRNA 疫苗。照片由 Spencer Davis 拍摄,来自 Unsplash。
可以通过反复实验实现混合时间的微调,但生产和测试实际装置既费时又费钱。仿真可以补充和完善小批量和大规模生产过程中的实验设计过程。在主题演讲中,Veryst 举例说明了如何利用仿真比较不同的微流体设备设计,通过几何特性实现混沌混合。
微流控设备中的混沌混合
在主题演讲中,Hancock 简要介绍了三种微流体设备设计的混合仿真预测,据报道,这三种设计已经用于真实的实验中来生产 LNP。在每种设计中,装载着脂质的乙醇从一个入口流出,装载着 mRNA 分子的水则从另一个入口流出。当两种流体汇合后再一起流过每个设备。理想情况下,所有三种设备设计都能使乙醇和水充分混合,并使各组分沿途自组装成 LNP。沿通道连续横截面的流线和乙醇浓度预测显示了这一过程混合成功(图3-5)。
型号1:蛇形混合器
在第一个模型(图3)中,Hancock 分析了一个采用蛇形设计的微流体设备。Hancock 说:“微流控蛇形混合器通过蛇形通道产生的涡流实现了高效的混沌混合。”该设备的通道高度为 100µm,这是微流控设备的典型特征。
在这种设计中,当流速较高(雷诺数为 20-100 )时,乙醇和水在蛇形通道的末端完全混合,这对于 LNP 的形成和 mRNA 疫苗的生产都是非常理想的。图3中的图像显示了“乙醇浓度在通道横截面上的分布,并显示了混合是如何沿着通道逐步进行的。”Hancock 说道。遗憾的是,在流速较低时,这种设备无法产生良好的混合和高效 LNP 生产所需的漩涡和惯性效应。
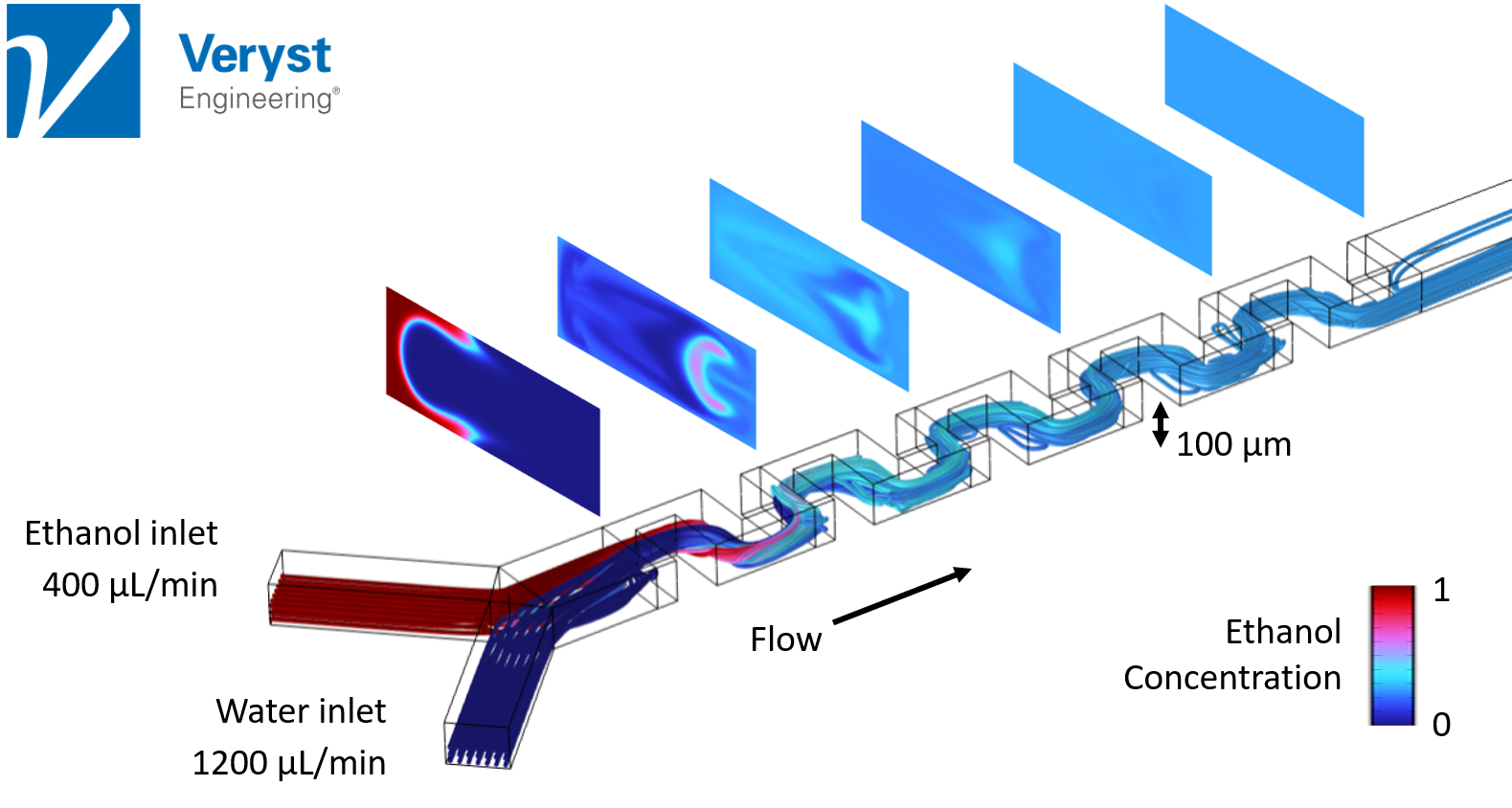
图3. 采用蛇形搅拌器设计的微流体设备的流线和通道横截面上的乙醇浓度。图片由 Veryst Engineering 提供。
型号 2:交错人字形搅拌器
第二个模型(图4)是一台交错人字形搅拌器。“这是一种人们一看到就会记住的搅拌器。” Hancock 介绍道,这种设计由 “人字形凹槽组成,这些凹槽沿着通道底部交替排列,使流线形成一种膛线”。
凹槽的交替方向促进了通道内物体的面包师变换(Baker’s transformation)。或者,正如 Hancock 所解释的那样:“它将最初大量的两种不同溶液拆分并重新组合,逐渐产生越来越多和距离越来越近的单个溶液交替层”。随着两种溶液层的距离越来越近,它们在分子扩散过程中的混合速度也越来越快。人字形搅拌器可提供跨流速的有效混合,这意味着它没有蛇形设计的高流速限制。
“事实证明,这种特殊类型的混合器在很宽的流速和雷诺数范围内都很高效。”Hancock 说道。该模型的预测表明,人字形混合器应能够高效生产 LNP 和 mRNA 疫苗。
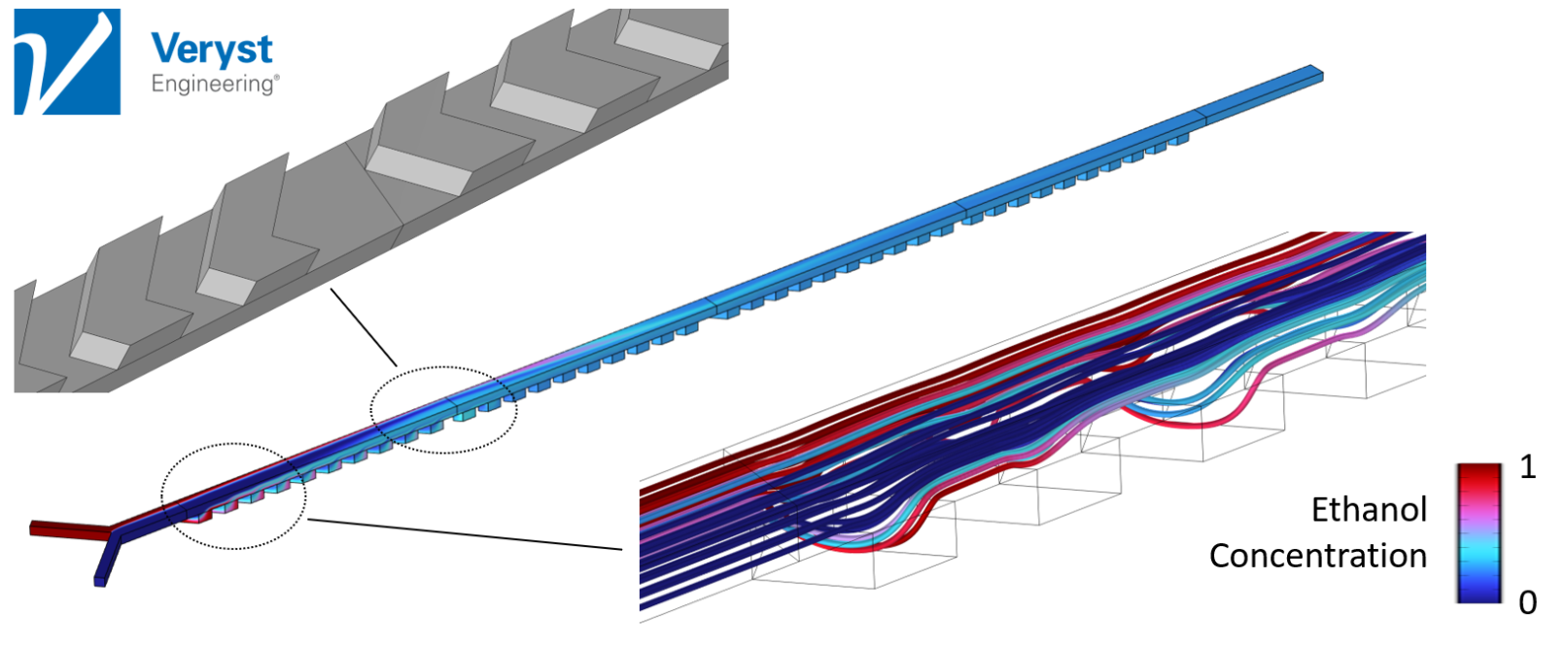
图4.采用交错人字形混合器设计的微流体设备的流线和通道横截面上的乙醇浓度。图片由 Veryst Engineering 提供。
模型3:环形混合器
主题演讲中讨论的最后一个模型是由一系列环形通道组成的微流体混合器。Hancock 说:“(这种)微流体混沌混合器使用的是迪恩流。迪恩流是流体在弯曲通道中运动时形成的一种循环,它在流速和雷诺数较高时非常活跃”。
在该模型的模拟中,流体的混合相对成功,但与蛇形方法一样,该混合需要较高的雷诺数。Hancock 还注意到,尽管通过每个环后的混合程度有所改善,但图中的设计(图5)需要更多的环才能产生理想的混合效果。
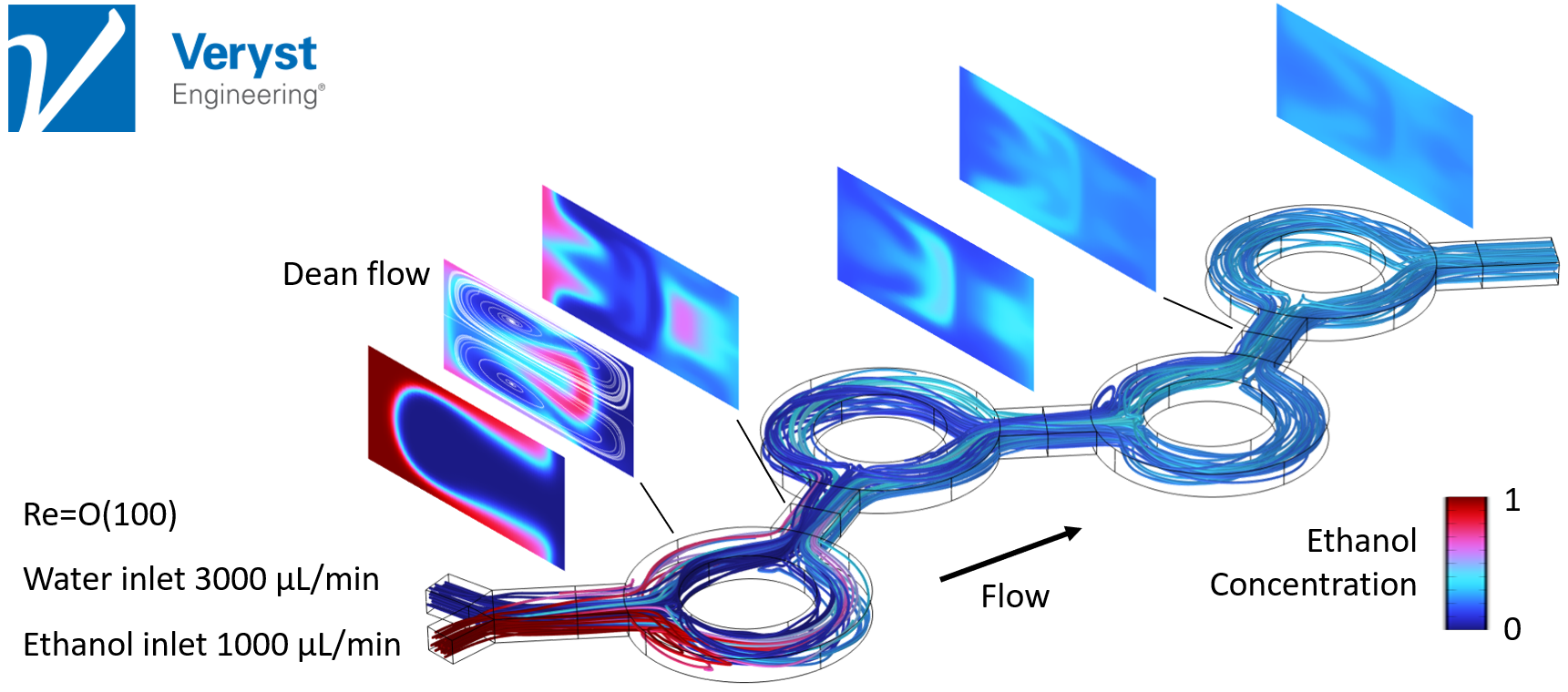
图5.采用环形混合器设计的微流控设备中,沿通道横截面的流线和乙醇浓度。
将仿真与实验相结合,实现更快、更好的设计
通过仿真,Barakat 和 Hancock 能够测试不同微流体混沌混合器设计的有效性,并优化通常缓慢的微流体混合过程。理想情况下,在制造实验混合器原型之前 就开始进行这种仿真和设计优化。在制造原型之前进行仿真,可以提高原型良好运行的可能性,减少需要制造的原型数量,从而节省时间和成本。在文中介绍的工作中,仿真表明环形混合器的设计应包括更多的环,以及混合性能如何取决于流速和雷诺数等运行参数流。为了生产 LNP 和 mRNA 疫苗,需要在实验室进行实验来测试每种混合器设计中形成的 LNP 的尺寸和分布,然后将其与混合指标相关联。
就像 Barakat 和 Hancock 在整个演讲中所展示的那样,流动、传递和 LNP 自组装的多物理场仿真可用于:
- 增强对 LNP 形成的流动和动力学限制的理解
- 将关键成果与系统参数相关联
- 对有意义的中间量和最终量(如混合时间和种群数量分布)进行定量估算
- 减少昂贵的实验室实验次数,提高每次实验的价值
- 指导迭代路径设计,提供新的药物开发路径
“我们已经证明,在微流控设备中可以实现有效的混合。仿真可以帮助调整设计参数,在制造和测试之前优化性能。”Hancock 说道。
下一步
观看 Veryst Engineering 的主题演讲视频,了解有关微流控设备中混沌混合的更多信息,查看他们如何模拟 mRNA 疫苗生产过程中的耦合混合和 LNP 自组装。
关于 Veryst 工程公司
Veryst Engineering, LLC 在技术与制造的交界处提供优质的工程咨询服务。他们的目标是成为多物理场仿真、材料科学、失效分析以及材料建模和测试领域的全球翘楚,并经常将其应用于非线性、耦合问题,从而使客户能够为其客户提供最好的产品。他们帮助世界各地的客户优化产品设计、改进制造工艺和诊断产品问题。
芬兰是桑拿的故乡。其实,“桑拿(sauna)”这个词是芬兰语,在英语和其他语言中用于表示一个体验热的小房间。除了在芬兰受欢迎之外,桑拿在世界上许多地方都很受欢迎。传统的桑拿房使用电炉或燃木炉加热,提供的干热可能达到或超过 100°C(212°F)。在这篇博客中,我们将使用 COMSOL Multiphysics® 软件创建的模型来研究这种桑拿房的加热和温度分布。
桑拿的物理特性
干式桑拿房通常是一个覆盖着如杨木、雪松或松木之类木材的小房间,房间内至少配置了两个不同高度的木凳。房间通过火炉加热。由于热空气膨胀导致其密度较低,所以桑拿房内最热的部分是靠近天花板的位置。如果你想体验温和一点的热量,可以坐在较低的长凳上,这样更接近地面。

一个传统的桑拿房。
通常炉子的顶部会覆盖一些石头(桑拿石),它们的温度会升高并向房间辐射热量。这些石头能够吸收并保持热量,发挥着重要的作用。你也可以向热石头上加水(这在北欧国家很常见),来释放蒸汽。这样可以增加湿度,并在在人的皮肤上短时间内引起强烈的热感,但皮肤的温度仍保持在露点以下。然而,只有在干热的环境下,才有可能享受超过几分钟的真正的热桑拿(高达或超过 100°C)。干热的环境能使更多的水分从皮肤上蒸发,防止身体过热。
桑拿房内发生的物理现象主要包括传热和流体动力学:传热是通过对流和辐射产生的,而热对流是由通风和浮力引起的空气运动驱动产生。桑拿房通常包含使空气流通的进气口和出气口。在湿式桑拿房中,水分含量和湿度也是很重要的物理特性,但在这篇博客中,我们将重点讨论干式桑拿房及其加热和温度分布。
桑拿炉有许多不同的类型和尺寸,使用什么型号的桑拿炉取决于桑拿房的大小。从小型家用桑拿房使用的约 5kW 功率到大型商业桑拿房使用的高达 20kW 功率,桑拿炉的功率范围变化较大。有时,烧木材的桑拿炉可以产生比电动桑拿炉更高的加热功率。然而,燃木桑拿炉的实际加热功率取决于用来生火的木材的数量、类型和质量。现代电热桑拿炉内置有恒温器,因此温度可以保持在一个理想的数值。

一个桑拿炉。
以下是桑拿炉加热过程中,我们关注的一些特性:
- 从开启或点燃桑拿炉到桑拿房达到所需温度需要的时间。如果知道需要多长时间,就会知道你有多少时间为体验桑拿浴做准备。
- 桑拿房内的热量分布,特别是凳子上。这样蒸桑拿的人就能找到一个舒适的温度。
模拟桑拿房的热分布
作为基准模型,我们对博客作者家里的桑拿房做了一些测量,这个房内刚好有一个烧木柴的炉子,但没有恒温器。点燃柴火后,通常需要 35~40 分钟(在正常室温下),顶层长凳的温度可达到 70°C 左右(158°F)。
桑拿模型
桑拿房内的传热物理模型本质上是一个多物理场模型,它的模型域(桑拿房内的空气、桑拿房的炉子和桑拿房的墙壁)中包括以下类型的物理场:
- 流体(空气)中的热传递:桑拿房内空气中的温度场。包括该模型的主要物理量,即空气温度。
- 湍流:桑拿房内流动的空气。它是对流传热的驱动力,使用一个湍流模型计算空气的速度场。
- 表面对表面辐射:来自炉子和桑拿房墙壁的热辐射(即通过电磁波传递热量),对桑拿房的整体温度有所贡献。用于计算出表面辐射率,即来自表面的热辐射,单位是 W/m2(SI 单位)。
还包括以下边界条件:
- 一个空气流出口。为了通风,桑拿房通常包括一个使空气流向建筑物外的小出风口。
- 一个空气流入口。来自通风或向周围房间的一些开口的空气流入。
- 通过墙壁的热通量。通过墙壁的热通量将取决于墙壁的类型和周围的温度。大多数情况下,桑拿浴室的墙壁是用木板覆盖的,但部分也可以是纯混凝土墙。有时,至少有一面墙壁是与外部空气接触的外壁面,外面的空气可能明显更冷(例如,在北欧国家的冬季)。在这个模型中,使用单独的热通量-外部 和热通量-内部 节点来考虑较冷的外部温度(10°C; 50°F)。室内温度被设定为 20°C (68°F)。
- 在加热器(桑拿炉)的顶部有一个使用了 10kW 加热功率的边界热源,但加热器的启动时间只有 10 min。使用一个表达式来描述恒温器边界,如果天花板的平均温度达到 100° C,就会关闭加热器,但在这个桑拿房模型中,以及在现实中并不会达到这样的高温。
这个模型必须考虑的物理参数包括材料属性、桑拿炉特性、整个桑拿房内部的尺寸和位置以及炉子和长椅。获取这些信息后,我们就可以开始使用 COMSOL Multiphysics 和传热模块来建立桑拿房模型,这个产品模块是建立湍流和表面对表面辐射模型所必需的。
在 COMSOL Multiphysics® 中创建模型
设置模型
第一步是创建一个代表桑拿房的内部和周围的墙壁的三维几何结构,也就是模型的外部边界。下图所示就是包含桑拿炉、长椅、进气口和出气口的三维桑拿房几何结构:


桑拿房的几何结构,其中天花板和门被隐藏起来。加热器和进水口位于右侧,长椅和出水口位于左侧。左边的墙是外墙;其他墙是内墙。
在桑拿房温度计所在的后墙上的一个点上定义了一个域点探针 功能,以便在瞬态模拟中能直观地看到温度计位置的温度上升。
接口
将要设置的COMSOL Multiphysics 模型必须能实现上述所有物理场,这可以通过三个物理场接口完成。第一个是固体和流体传热 接口,用于包括桑拿房内的对流传热,其中墙壁是固体,桑拿房内的空气是流体。
第二个接口是湍流,代数 y+ 接口,用于描述桑拿房内空气的湍流情况。该接口使用了一个代数 y+ 湍流模型,即一个基于近壁距离的代数湍流模型。代数 y+ 湍流模型基于普郎特混合长度理论建立,适用于内部流动建模。
最后,使用表面对表面辐射 接口来实现炉子和墙体边界之间的辐射热交换(内部空气并不显著参与辐射热交换)。
节点和材料
使用两个多物理场特征节点来耦合空气流动和热传递(非等温流动),以及表面到表面辐射和空气中的热传递。一个是非等温流动节点。这个节点耦合了湍流、k-ε 和流体传热 接口,用于模拟流体属性取决于温度的流体流动。另一个节点是表面对表面辐射传热,它耦合了墙体的表面对表面辐射和空气中的对流传热。在这个示例中,需要考虑到边界上的辐射传热,而周围的介质不参与辐射。
此外,模型中还使用了以下四种材料:
- 空气,包含了与温度和压力有关的空气材料属性(COMSOL内置材料库中包含这些参数)。
- 混凝土,用于桑拿房墙壁的材料
- 木材(松木),覆盖桑拿房墙壁内部的材料,也是长椅的材料。
- 辐射墙,一个额外的用户定义的材料,用于定义边界上的表面辐射率。
添加了流出 和流入 节点,分别代表热量的流入和流出。另外,在墙体边界上有一个热通量 节点,用于添加由外部温度和传热系数定义的热通量。最后,使用边界热源 节点模拟桑拿炉。为了对加热过程进行建模,使用了一个温度一旦超过 100°C 时就会关闭加热器的恒温器和一个持续 10min 左右的平滑启动阶段的表达式。用于描述边界热源的表达式是 10[kW]*flc2hs(100[degC]-aveop1(T),10)*flc2hs(t-t_heater/2,t_heater/2),其中第一个系数 10[kW],代表炉子的额定加热功率。第二个系数使用内置函数 flc2hs,这是一个平滑的 Heaviside 函数,具有连续的二次导数,没有过冲,用于确保如果平均天花板温度接近 100°C,加热器就会关闭。在我们的例子中,没有达到这个温度,所以第二个系数等于 1。最后,第三个系数, flc2hs(t-t_heater/2,t_heater/2),用于描述一个围绕 t_heater 的平滑启动,在启动时间之前和之后的 t_heater/2 之间持续平滑。下图显示了热功率与时间的关系:

加热器的功率在大约 10min 内从 0 上升到其额定值 10kW。
研究
使用该模型进行了三项研究。第一项是含初始化的稳态研究,包括用于计算湍流的壁距离倒数的壁距离初始化 研究步骤,以及用于计算气流的稳态起始解的稳态 研究步骤。在这个步骤中,固体和流体传热 以及表面到表面辐射接口 没有被激活。
第二项研究包含主要的瞬态 研究步骤。该研究包括前面提到的三个物理场接口和两个多物理场耦合。在瞬态 研究步骤的设置中,用分钟作为时间单位,输出时间设置为 range(0,0.5,60),这是 COMSOL Multiphysics 的表达方式,即每 30s 输出一次解,持续一小时。(求解器的实际时间步长由容差控制,与选择的输出时间无关)。计算不是从零速度开始,而是从第一次研究得到的速度场开始,它计算了通风引起的初始速度场。这个研究步骤在一台性能好的电脑上计算大约需要 45~55min。在此期间,可以利用 COMSOL Multiphysics 中的求解时绘图和探针功能监测域内的气流和温度,以及桑拿房内温度计位置的温度。
第三项研究是为了方便运行而添加的。它包含两个研究引用 节点,一个引用研究1 ,另一个引用研究2 。因此,通过运行第三项研究,可以按顺序运行前两项研究。
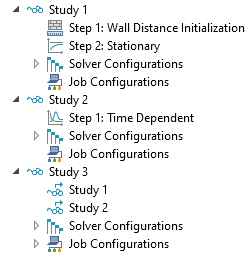
桑拿模型中的三项研究:第一项用于壁距离初始化;第二项用于瞬态模拟;第三项是为了方便地运行这两项研究。
温度分布结果
我们要看的主要结果是 60min 后桑拿房内的温度变化,可以在下面的切面图中看到:

加热 60min 后,桑拿房内的温度分布。最高温度为 339° C (642°F),是在加热器的顶部,而进风口则保持在 10°C(外部温度)。
为了更好地了解桑拿房内的垂直温度差异,我们可以限制数据和颜色范围,只显示 10 到 100°C 之间的温度。下图显示,从地板到顶部的长凳有一个明显的温度梯度:

该图显示,顶部长凳的温度约为 70°C,但底部长凳的温度只有 30-40°C(86-104°F),因此,如果你愿意,可以移到较低的位置避免过热。
域点探针 功能的温度折线图显示,在安装桑拿温度计的地方温度是如何上升的:

桑拿房温度计位置的温度与时间的关系。温度上升得相当快,但如果你想在享受桑拿浴前使温度上升到70°C,必须等待 30min 以上,这与作者的经验相一致。
为了进一步探索这个多物理场模型,还可以尝试改变炉子的加热功率、环境温度、材料属性、长凳位置以及其他可能影响桑拿房内加热和温度分布的参数。
结语
文章介绍了如何利用 COMSOL Multiphysics 模型解释和探索桑拿房的加热问题。还可以使用类似的模型模拟热量和水分传输(HAM),用于改善和优化一般建筑物的供热以及其他供热应用。以下是使用 COMSOL Multiphysics 和传热模块建立的基于热量的模型的例子:
- 有火炉的房间内的传热:这个模型显示了火炉对房间不同表面的辐射强度。
- 建筑结构中的热桥 – 两层楼之间的三维结构:这个例子与欧洲标准 EN ISO 10211:2007 中描述的建筑结构中的热桥基准案例3相对应。
- 木质框架中的冷凝风险:这个二维稳态模型计算了 HAM 在由不同吸湿材料组成的壁中的传输。
- 热量和水分在半无限壁中的热湿传递:HAM 模型被定义为标准 15026:2007 附录A中的一个基准案例。
仿真是运行实验的一个方便的手段,因为你可以相对快速和经济地运行大量测试,进而减少风洞试验的次数。为了让你相信跨音速流的仿真结果,我们基于著名的 ONERA-M6 机翼创建了一个验证模型。
使用 COMSOL Multiphysics® 模拟跨音速流
当你将 CFD 模块添加到 COMSOL® 多物理场仿真平台后,就可以访问专门用于模拟流体流动的功能,包括各种预定义的物理场接口。广义上讲,物理场接口定义了方程、分析、网格、研究和求解器,以及适用于特定工程领域或物理现象的结果评估和可视化功能。你始终可以访问 COMSOL Multiphysics 平台包含的基本物理场接口,并且可以通过添加与你的工作相关的模块,例如这个例子中的 CFD 模块来扩展可用的接口列表。

COMSOL Multiphysics 用户界面与正在使用的 CFD 模块中的高马赫数流接口。图形窗口显示求解 ONERA-M6 机翼模型后的结果。
如果你要使用 COMSOL Multiphysics 对机翼上的跨音速流进行建模,需要添加 CFD 模块并使用高马赫数流 接口,最好使用 Spalart-Allmaras 湍流模型,这是一个为空气动力学开发的单方程模型。请注意,我们不会在这里介绍如何设置模型的详细信息,但欢迎你从 COMSOL 案例下载页面下载 MPH 文件和相关说明。
关于 ONERA-M6 机翼模型
ONERA-M6 机翼最处创建于 1970 年代,用于验证涉及跨音速和高雷诺数的(3D)流动计算机模型。通过将我们的模拟结果与 ONERA-M6 实验数据进行比较,我们可以验证 COMSOL 模型是否准确。我们的验证模型基于 NASA 兰利研究中心提供的机翼 CAD 几何结构,我们使用 CAD 导入模块将它导入到 COMSOL Multiphysics 中。(顺便说一下,如果你以前没有看过原始机翼设置的照片,可以在 ONERA 网站上查看。)
结果和验证
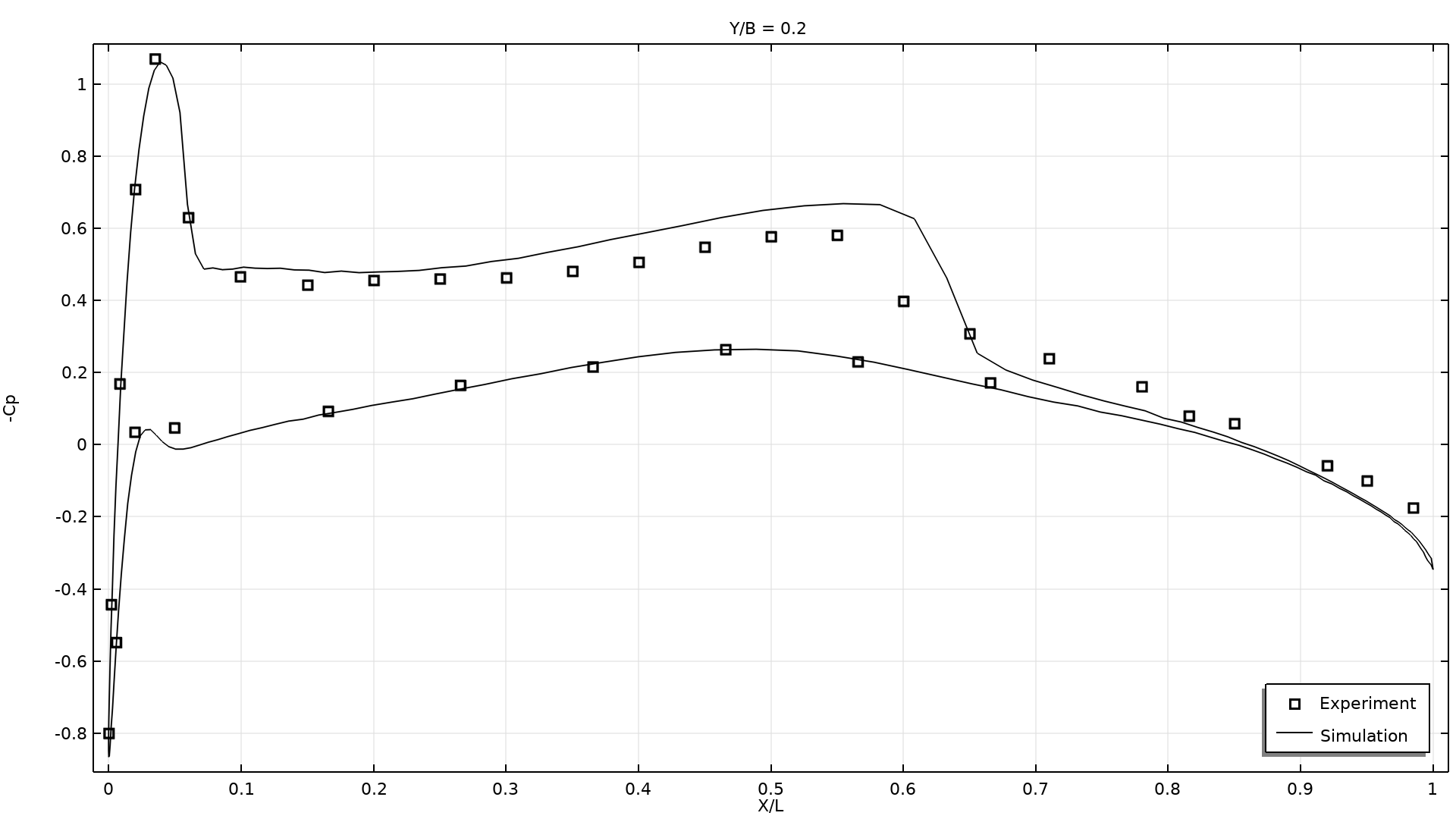
运行并求解模型后,我们可以使用表面图和轮廓图可视化机翼上的马赫数和压力分布。结果显示机翼表面存在两个弱激波:

这个结果与 ONERA-M6 机翼的实验结果相比如何呢?通过绘制仿真结果和风洞试验的结果,我们看到二者之间存在良好的一致性。简单来说,这个模型准确地描绘了激波的位置和压力系数曲线跳跃的大小。你可以浏览二者结果的比较图:
 仿真与实验结果对比(1/8)
仿真与实验结果对比(1/8)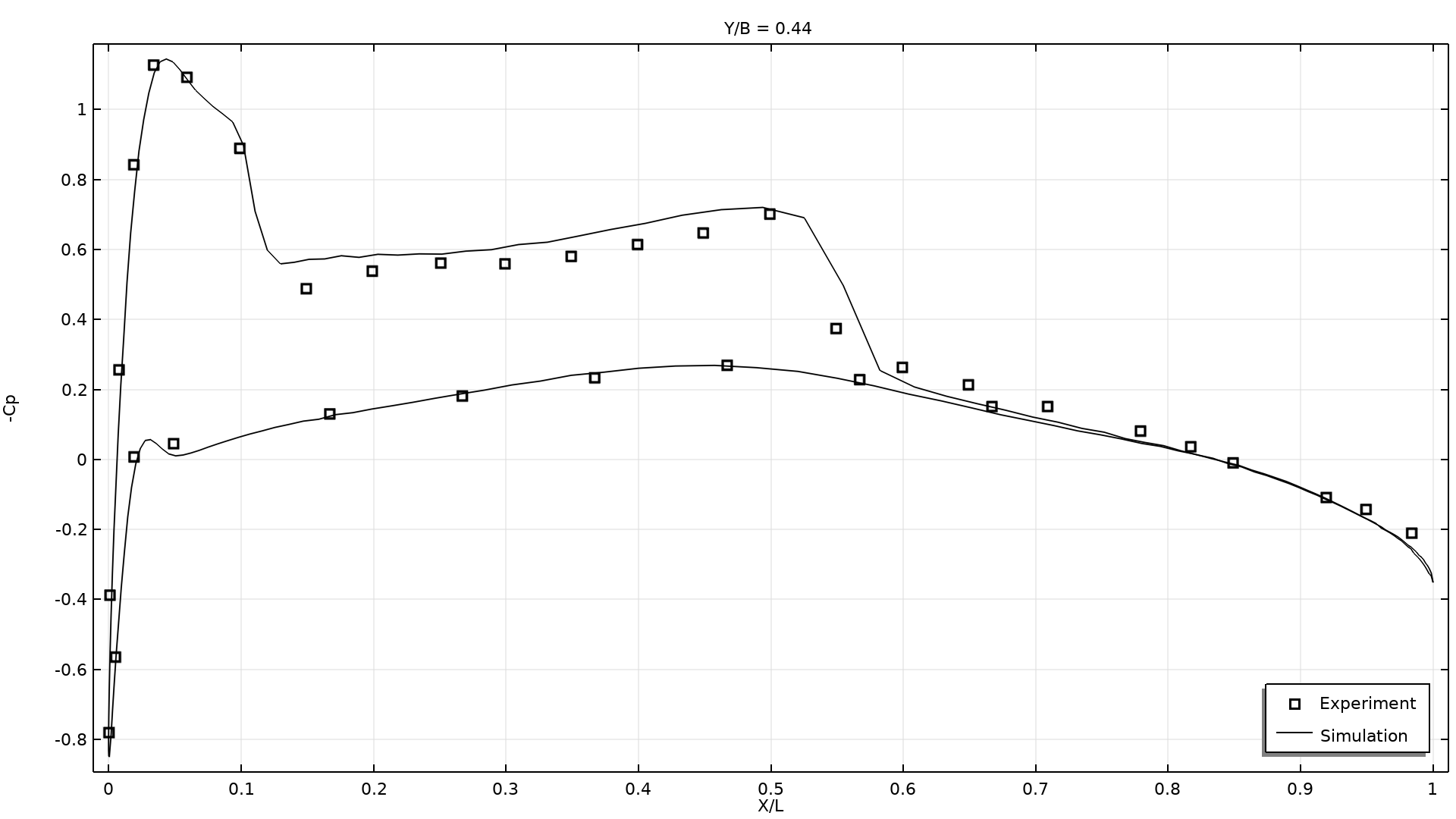 仿真与实验结果对比(2/8)
仿真与实验结果对比(2/8)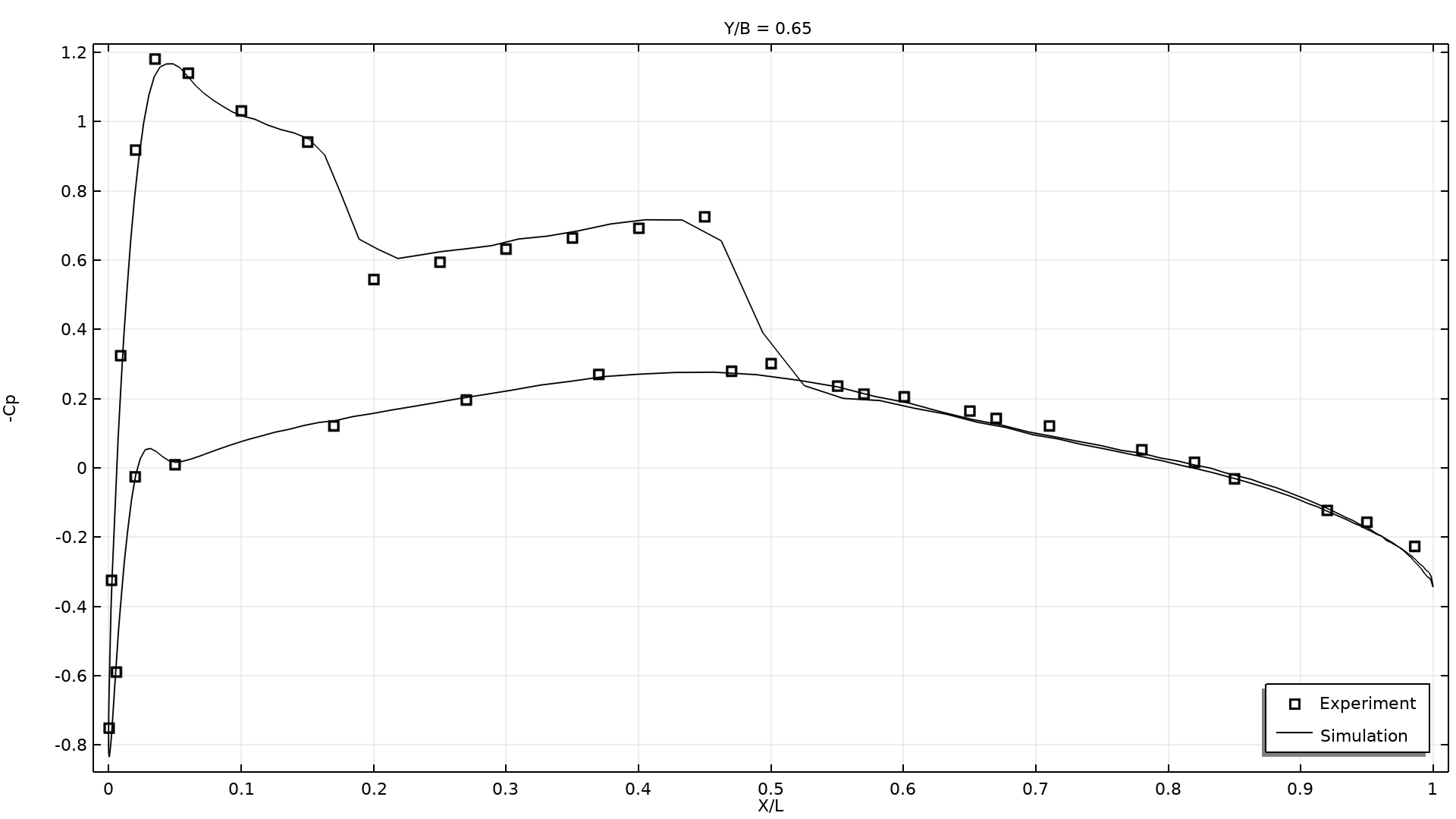 仿真与实验结果对比(3/8)
仿真与实验结果对比(3/8)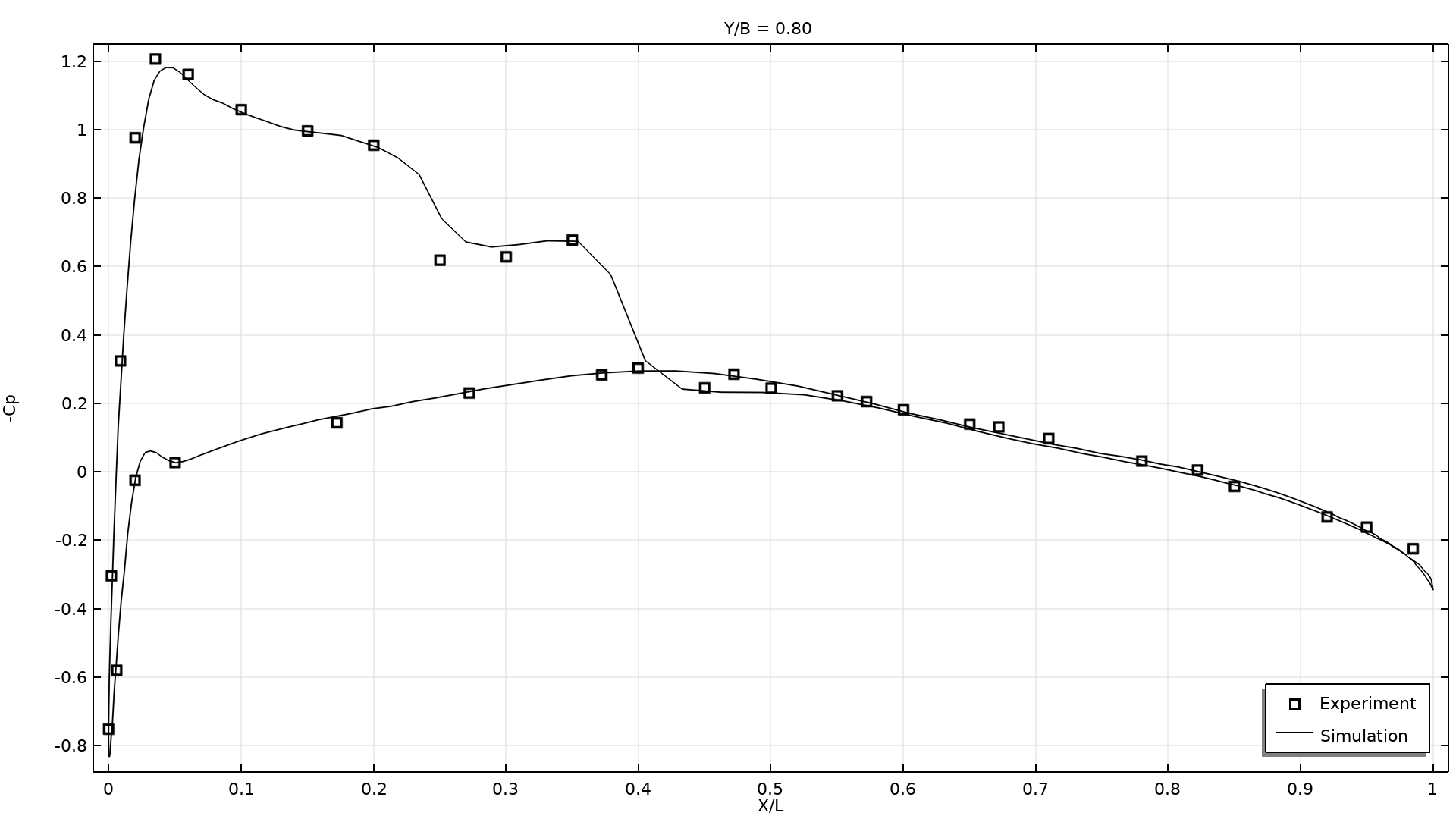 仿真与实验结果对比(4/8)
仿真与实验结果对比(4/8)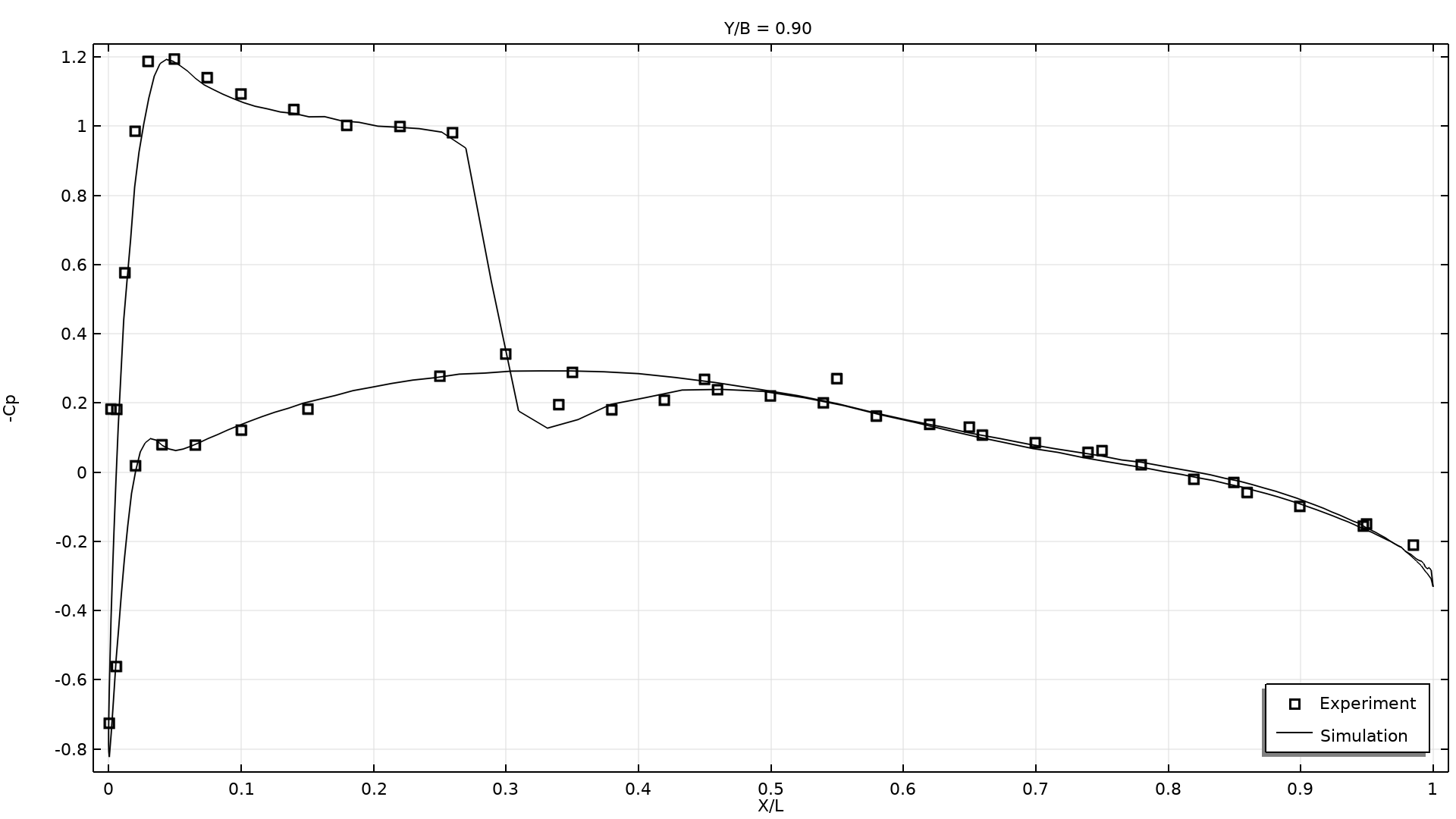 仿真与实验结果对比(5/8)
仿真与实验结果对比(5/8)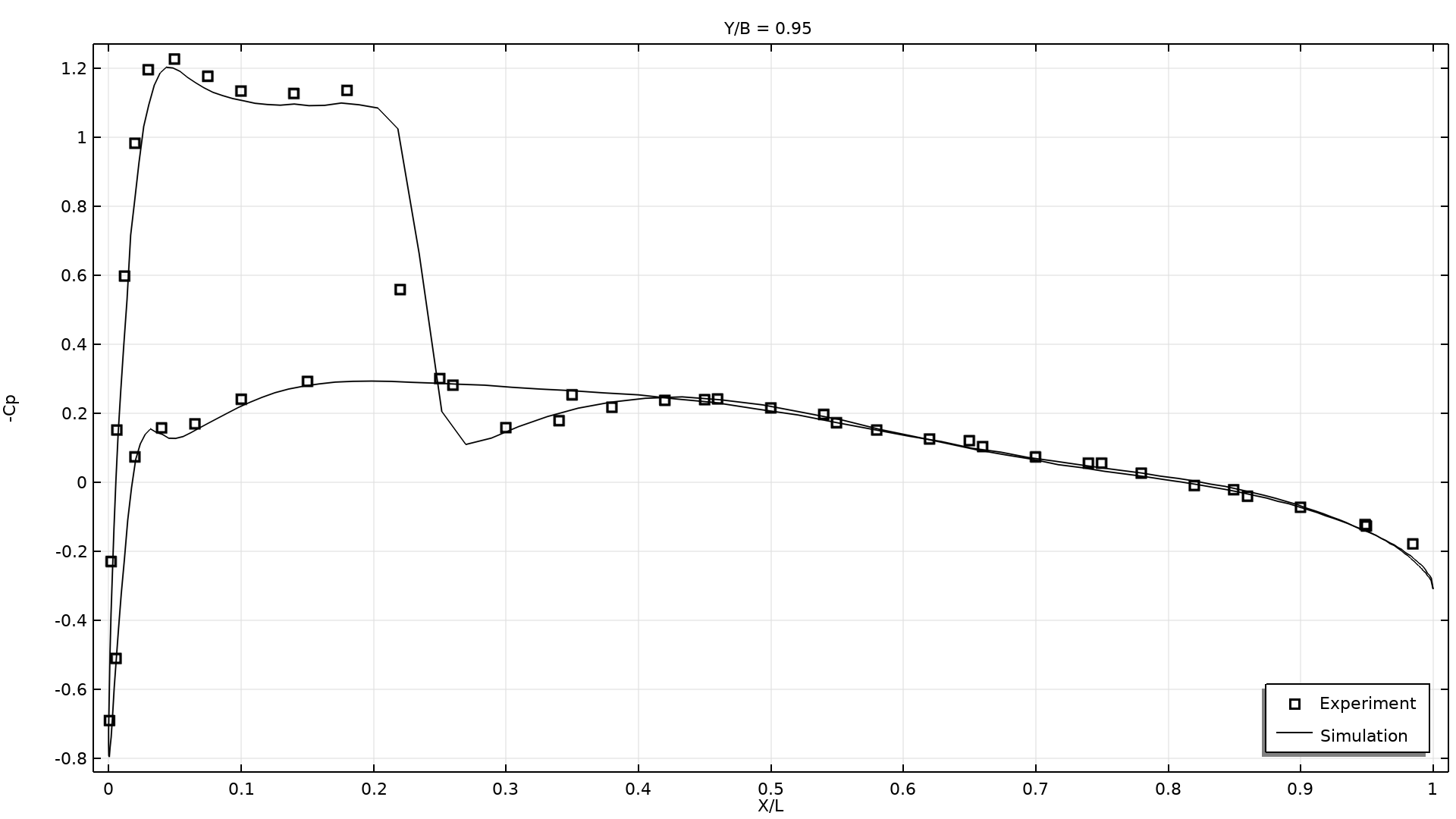 仿真与实验结果对比(6/8)
仿真与实验结果对比(6/8)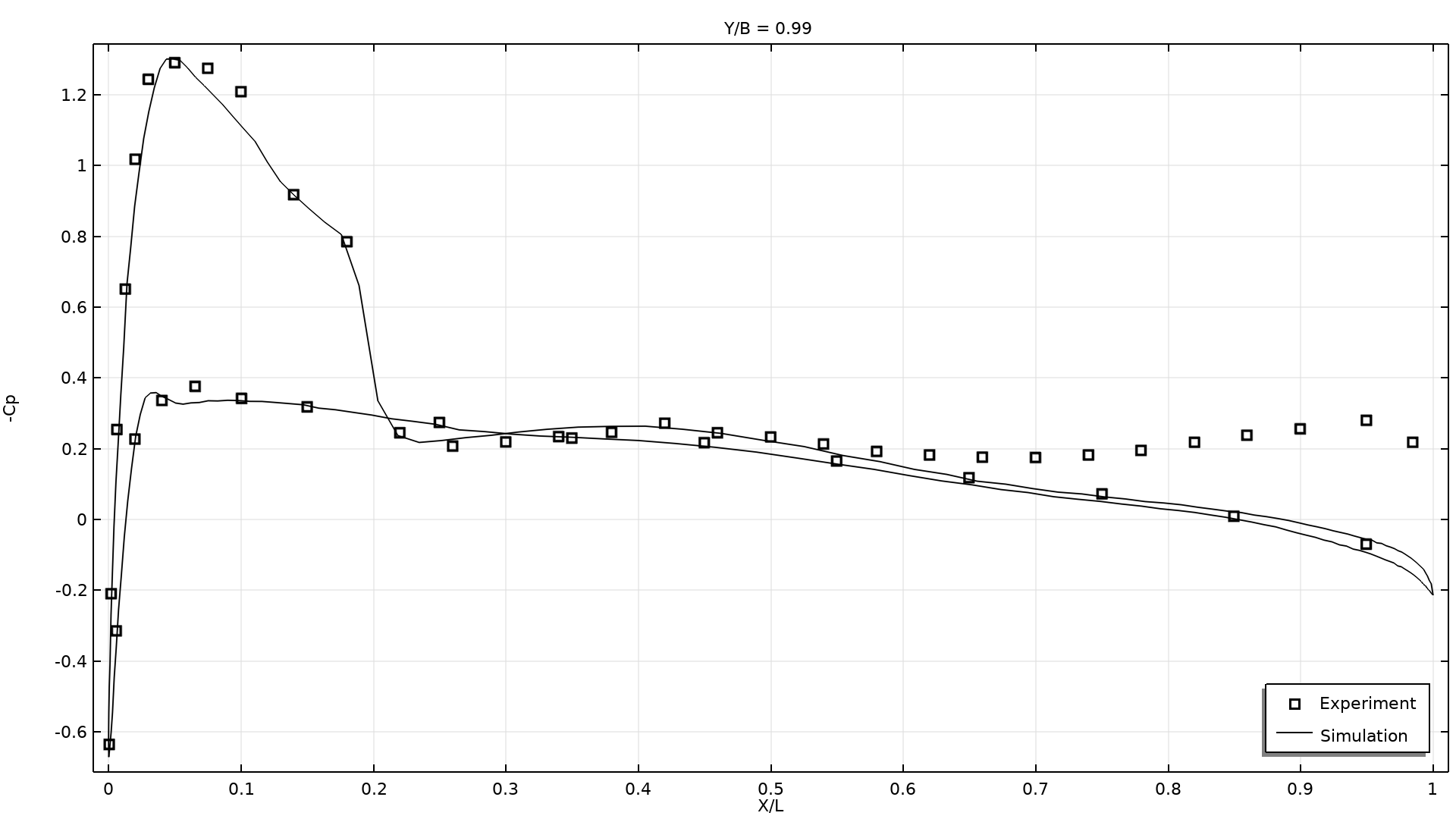 仿真与实验结果对比(7/8)
仿真与实验结果对比(7/8)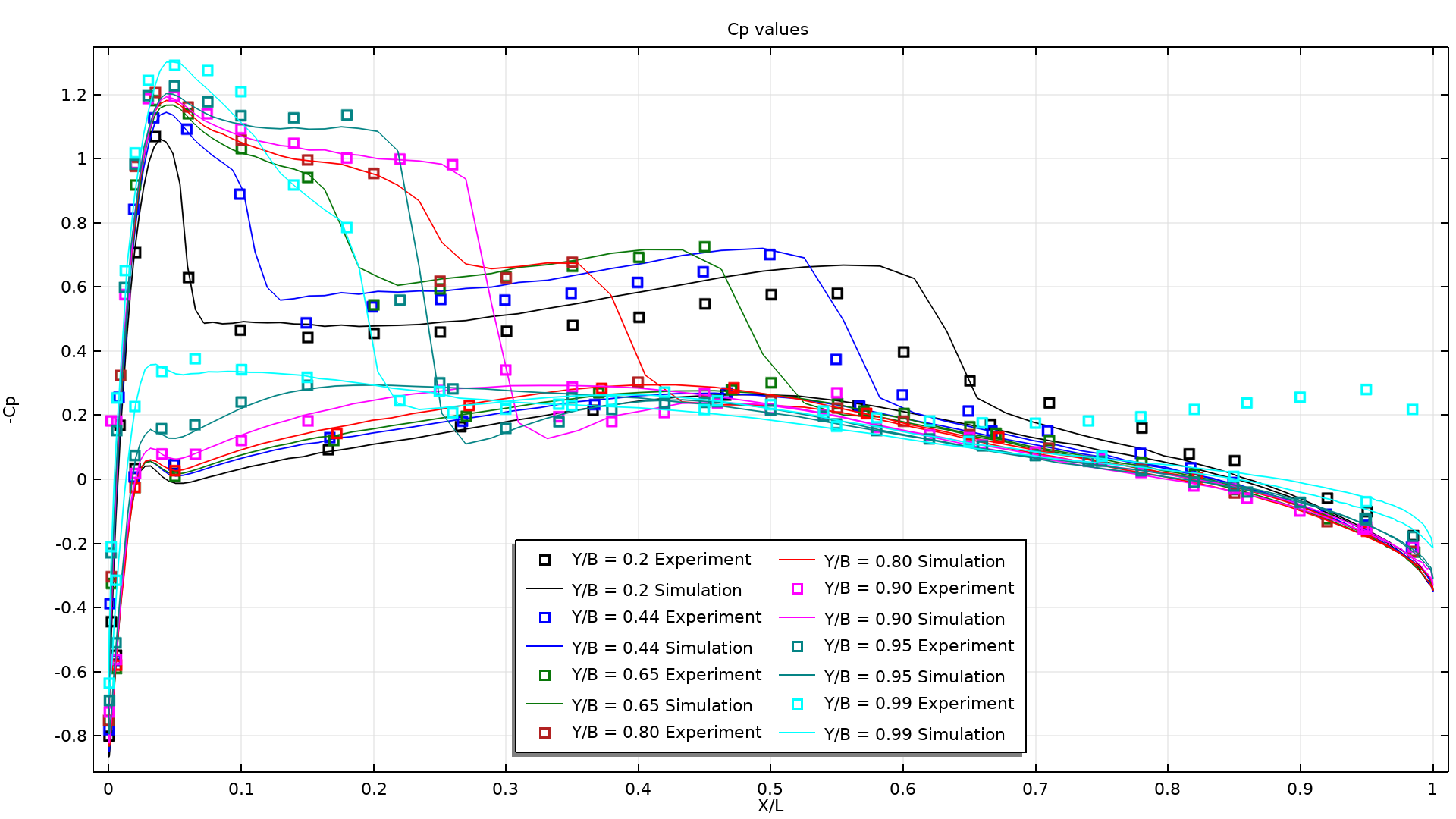 仿真与实验结果对比(8/8)
仿真与实验结果对比(8/8)
自己动手尝试
准备好带着模型进行试飞了吗?文中介绍的所有模型文件(包括分步说明)均可从 COMSOL Multiphysics 6.1 版本的案例库中下载。
ONERA-M6 模型只是可供下载的众多验证和确认模型之一。如需你想要了解更多信息,请访问 博客文章“现已推出:验证和确认 COMSOL 软件的模型集”的,访问完整模型集。
这个模型使用来自 ONERA-M6 机翼的数据作为参考。这个模型不属于 ONERA,没有获得 ONERA 的认可或赞助。