复合材料是指至少由两种材料构成的异质材料。在不同类型的复合材料中,层状复合材料非常常见,被广泛用于飞机、航天器、风力发电机、汽车、船舶、建筑物和安全设备等领域。COMSOL Multiphysics® 软件的附加产品复合材料模块内置了专用于研究层压复合材料结构的特征和功能。一些常见的层压复合材料有纤维增强聚合物、颗粒增强聚合物、层压板和夹层板等。
编者注:原博客最初由 Pawan Soami 撰写,发布于 2018 年 12 月 6 日。现已更新,以反映最新版本软件的特征与功能。
内容简介
什么是复合材料?
由于复合材料具有特定的力、热、电和磁性能,因此在不同的领域具有许多潜在的应用。例如,一些行业正在开发具有传感、驱动、计算、通信和其他功能的“智能”复合材料。在结构工程领域,复合材料较传统的整体式材料更加坚固和轻盈,因此得到了广泛的应用。在使用这种材料设计复合结构之前,工程师必须充分了解它们的性能。
使用复合材料的优势和面临的挑战
相较于传统材料,复合材料具有多种优势,例如:
- 高强度重量比
- 强耐冲击性
- 高抗疲劳性和抗腐蚀性
- 摩擦性和磨损性增强
- 低导热系数和低热膨胀系数
- 高耐热性
复合材料由多种材料混合而成,因此使用这些材料也会遇到一些挑战,包括:
- 各向异性特性
- 复杂的损伤和失效模式
- 原材料和加工成本高
- 难以重复利用和处置
- 不同组件的连接性差
复合材料的应用领域
由于具有以上优点,复合材料被广泛用于以下领域:
- 航空航天工程(如卫星的机翼、机身和结构板)
- 国防安全(例如,坦克和潜艇)
- 风力发电机(例如,叶片)
- 建筑和施工 (例如,门、面板、框架和桥梁)
- 化学工程(例如,压力容器、储存罐、管道和反应堆)
- 汽车和运输工具(例如,自行车和汽车零部件)
- 海洋和铁路运输(例如,船体和铁路部件)
- 消费品和体育用品(例如,网球拍和高尔夫球杆)
- 电子产品(例如,配电柱和连接箱)
- 矫形辅助工具
- 安全设备
复合材料的类型及其分类
复合材料有多种分类方法,其中一种方法是根据构成类型(即基体和加强件)进行分类。根据基体材料的类型,可以将复合材料分为以下几类:
- 聚合物基复合材料 (PMC)
- 金属基复合材料 (MMC)
- 陶瓷基复合材料 (CMC)
- 水泥基复合材料 (CeMC)
根据加强件类型,可以将复合材料分为以下几类:
- 纤维复合材料
- 晶须复合材料
- 颗粒复合材料

纤维、晶须和颗粒复合材料示例
纤维增强复合材料
相较于其他层压复合材料,纤维增强聚合物(FRP)是当今非常流行的一种复合材料。这些材料通常由作为主要承载元件的长纤维和周围用于支撑纤维并传递载荷的基体组成。纤维以指定的方向排列在材料的每一层(或薄层)。大量这样的薄层铺设在一起就形成了可用于构建结构部件的层压复合材料。工业用纤维通常由碳、玻璃、芳纶或硼制成。根据纤维材料的类型,目前业界最常用的两种纤维增强聚合物是碳纤维增强聚合物(CFRP)和玻璃纤维增强塑料(GFRP),也称为玻璃纤维。
虽然我们可以使用 复合材料模块分析任何各向异性层压复合材料,但在这篇博客中,我们将重点讨论单向纤维增强聚合物。
层压板类型
复合材料层压板是指由两个或多个单向层/层/薄片按照指定的方式,以一致或变化的纤维取向铺设而成。薄片可以由相同或不同的材料制成,并且可以具有各自的厚度。铺设顺序由各层纤维相对于层坐标系第一轴的取向定义。
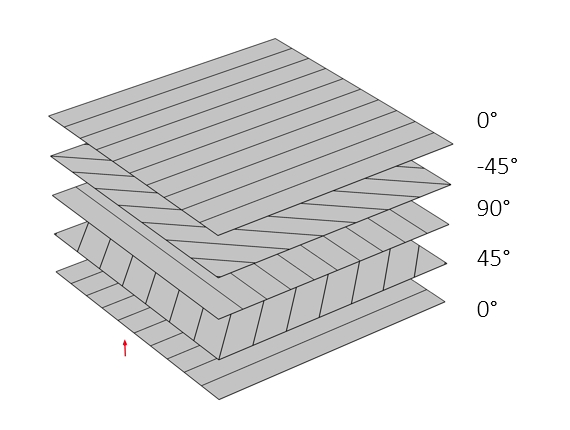
反对称平衡层压板的铺设顺序(0/45/90/-45/0)。
根据铺设顺序,复合材料层压板被分为以下几种类型:
- 斜角层压板 (例如, 45/30/-45/-30)
- 交叉层压板 (例如, 0/90/0/90)
- 对称层压板 (例如, 45/30/30/45)
- 反对称层压板 (例如, 45/30/-30/-45)
由于纤维、板层和层压板的几何比例完全不同,因此分析复合材料层压板相当困难。这也是我们要在细观力学、宏观力学,以及两种(或多种)不同尺度上执行分析的原因。
细观力学
细观力学分析侧重于复合材料的组成层水平。它考虑了组成材料、材料界面以及材料的内部排列。细观力学分析不仅可以计算均质化的材料特性,还有助于了解细观层面的应力、应变、非线性、失效和损伤等。基于细观力学的均质化分析方法主要有两种:
- 分析法(例如,混合规则)
- 数值方法(例如,使用代表性体积单元 (RVE) 或重复单元 (RUC) 进行有限元分析)
在模型开发器树的 材料 节点下,多相材料 和 有效材料 节点包含多个用于分析计算有效性的混合规则。有效材料 节点内置于复合材料模块,包含以下混合规则:
- 体积平均
- 质量平均
- 谐波体积平均
- 谐波质量平均
- 幂律
- Heaviside 函数
- Voigt–Reuss 模型
- 修正的 Voigt–Reuss 模型
- Chamis 模型
- Halpin–Tsai 模型
- Halpin–Tsai–Nielsen 模型
- Hashin–Rosen 模型
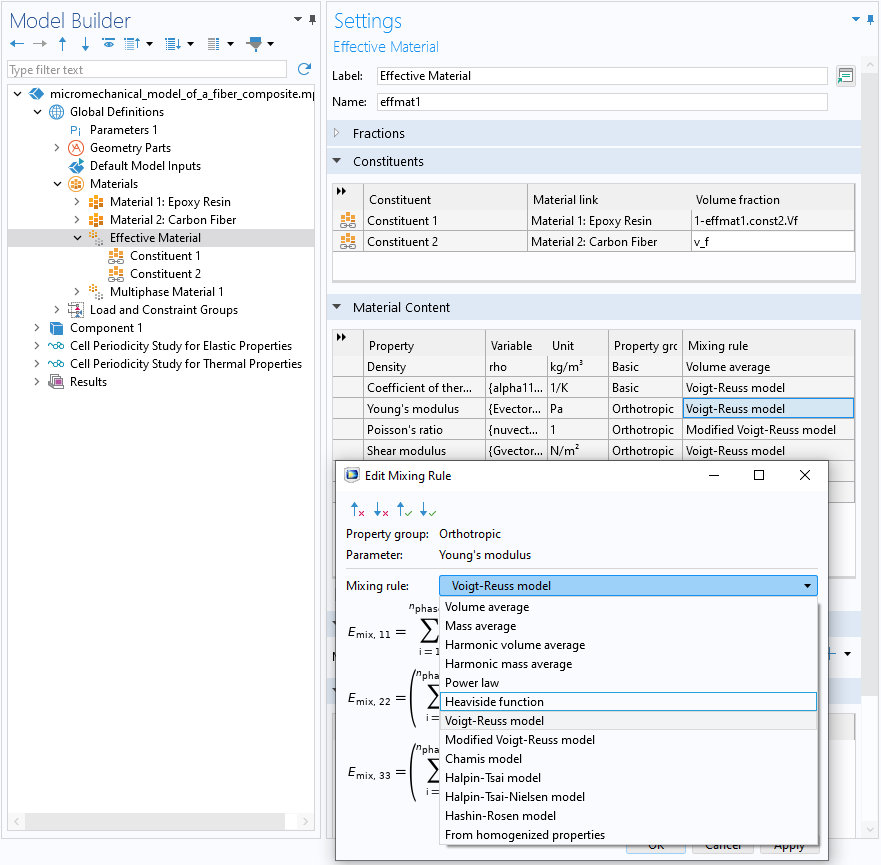
显示了 混合规则选项的 有效材料特征设置窗口
要使用有限元方法数值计算均质材料特性,需要使用 RVE 或 RUC。对于周期性材料,RVE 与 RUC 相同,但对于非周期性材料,RUC 的概念无效,因此必须使用 RVE 材料子体积。
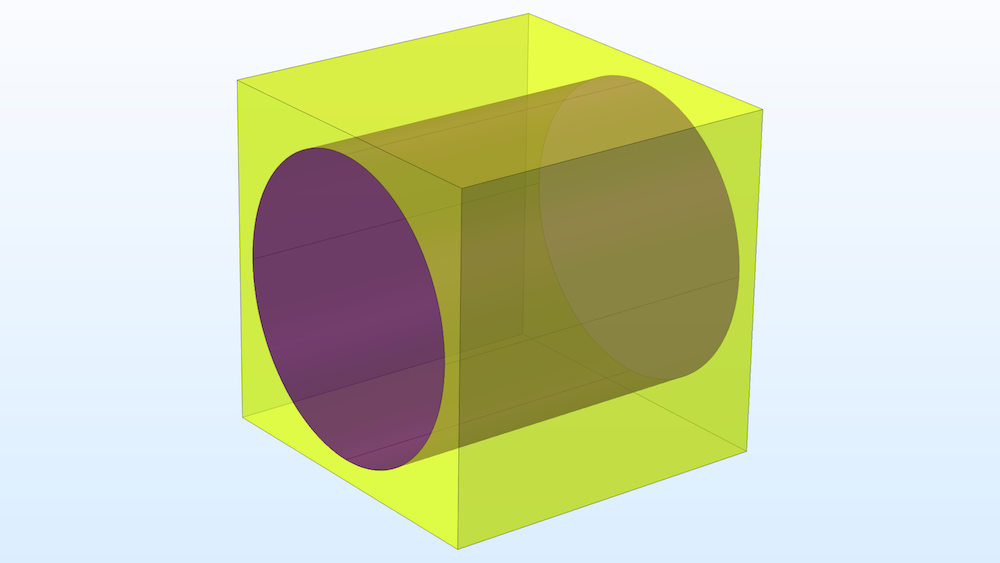
60% 纤维体积分数的纤维复合材料层的晶胞。
在 COMSOL Multiphysics® 中,使用 固体力学 接口中的 单元周期性 节点进行基于细观力学的均质化。该接口有两种不同的边界条件:周期性 和均质。周期性 边界条件适用于周期性材料,需要使用 RUC 材料子体积。对于非周期性材料,可以通过 RVE 材料子卷应用均质 边界条件。在这篇博客中,我们将重点讨论周期性单向纤维复合材料的均质材料特性。
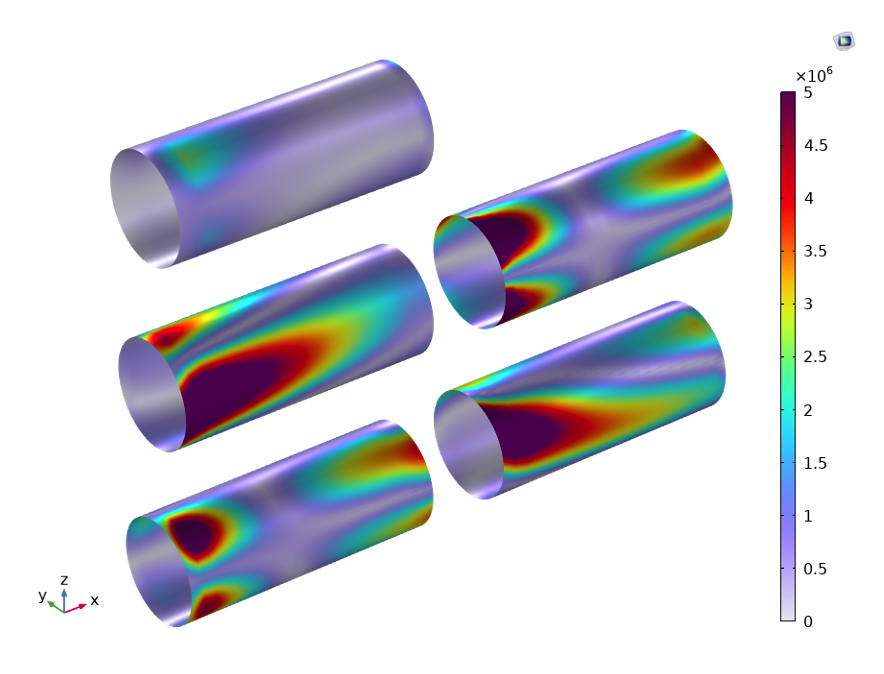
我们从一个包含纤维和基体的晶胞几何结构开始分析。首先需要给出纤维和基体的材料属性。然后,使用单元周期性 节点中的操作按钮设置所需的模型节点和研究。自动创建的研究将计算均质材料的材料数据。
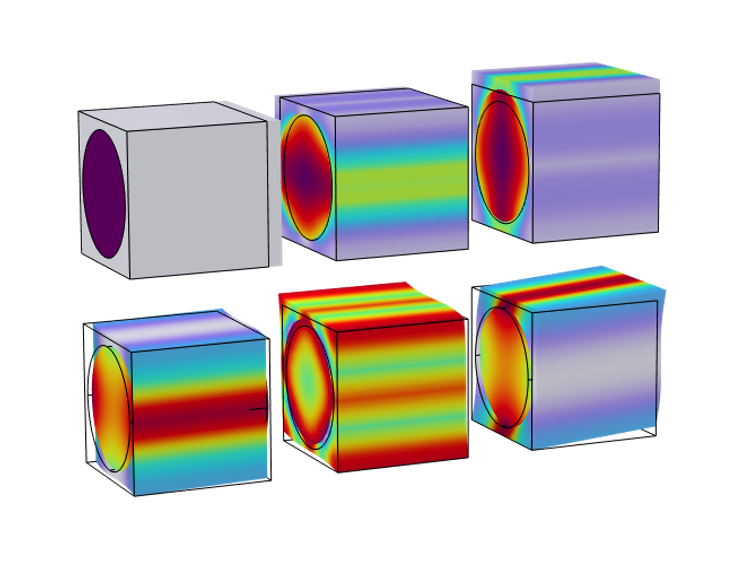
6 种不同载荷下,晶胞中的 von Mises 应力分布和变形。
了解更多内容,请查看纤维复合材料的细观力学模型和复合材料气瓶的细观力学和应力分析案例模型。
宏观力学分析
宏观力学分析基于均质材料确定复合结构的响应。层压板的均质材料特性可通过细观力学分析或实验方法获得。宏观力学分析的目的是计算层状结构在各种载荷和边界条件下的整体响应。宏观力学分析包括以下几个不同步骤。
复合材料仿真的预处理方法
模拟复合层压板, 需要指定以下几个特性:
- 层数
- 每一层的均质材料特性
- 层压板主要材料方向的定向
- 每一层厚度
- 铺设顺序
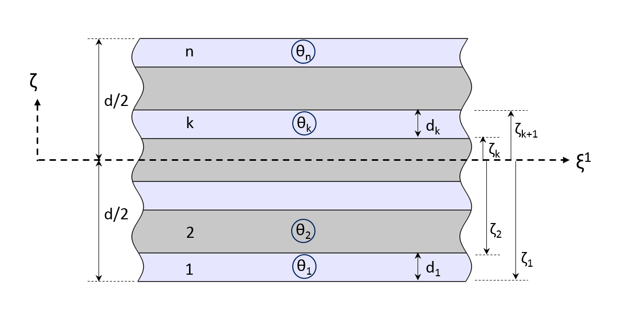
复合材料层压板的横截面显示了每一层的纤维厚度和取向。
要定义层压材料的属性,需要使用 多层材料 节点。在该节点中,可以添加所需的层数,输入内容可以直接输入表格,也可以从文本文件中加载。指定输入后,就可以预览层压材料的横截面和铺设顺序。您可以将包含层压板定义的多层材料保存在材料库中,方便后续加载使用。
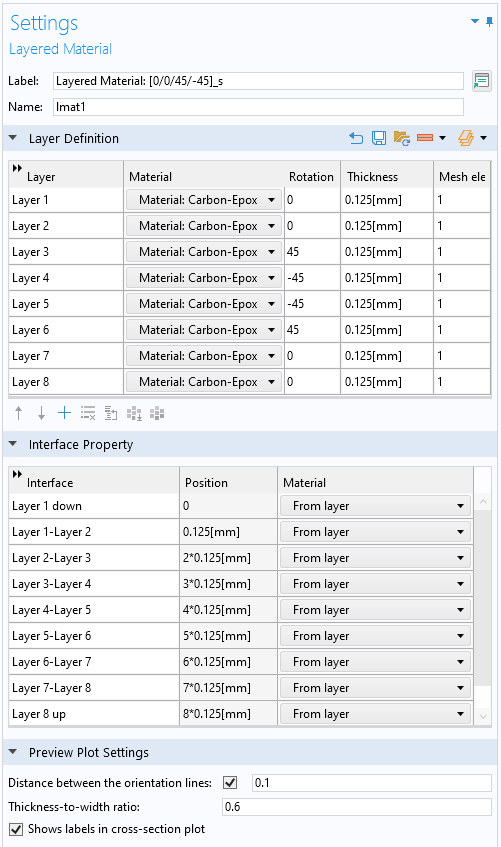
多层材料节点示例。
使用 多层材料 节点定义层压材料后,就可以通过 多层材料链接 或 多层材料堆叠 节点将其连接到几何边界。在此过程中,层压材料坐标系以及几何表面相对于层压材料的位置也会被定义。层压坐标系还能进一步用于解释铺设顺序,创建多层局部坐标系。多层材料链接 和 多层材料堆叠 节点还具有可以将多层材料转换为对称、非对称或重复层材料的更多选项。还包括模拟厚度在空间上变化的模型选项。多层材料堆叠 节点可用于区域建模,在不同的几何选择中,复合材料的铺设顺序会有所不同。
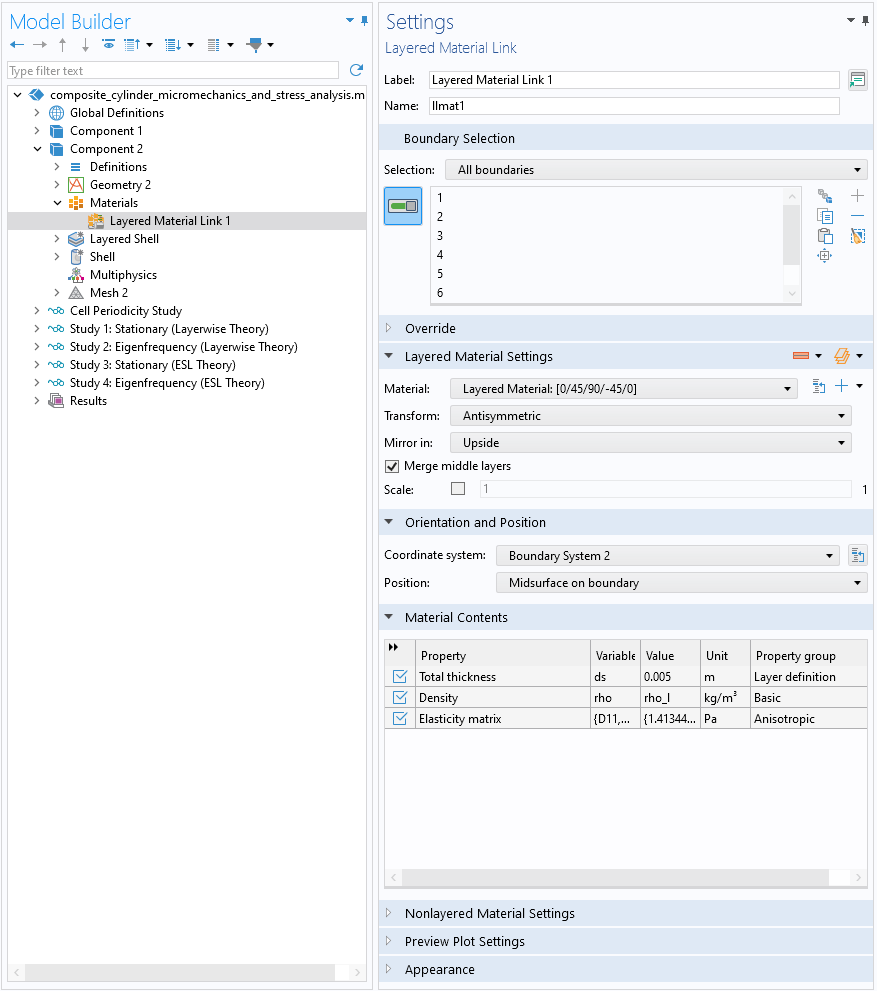
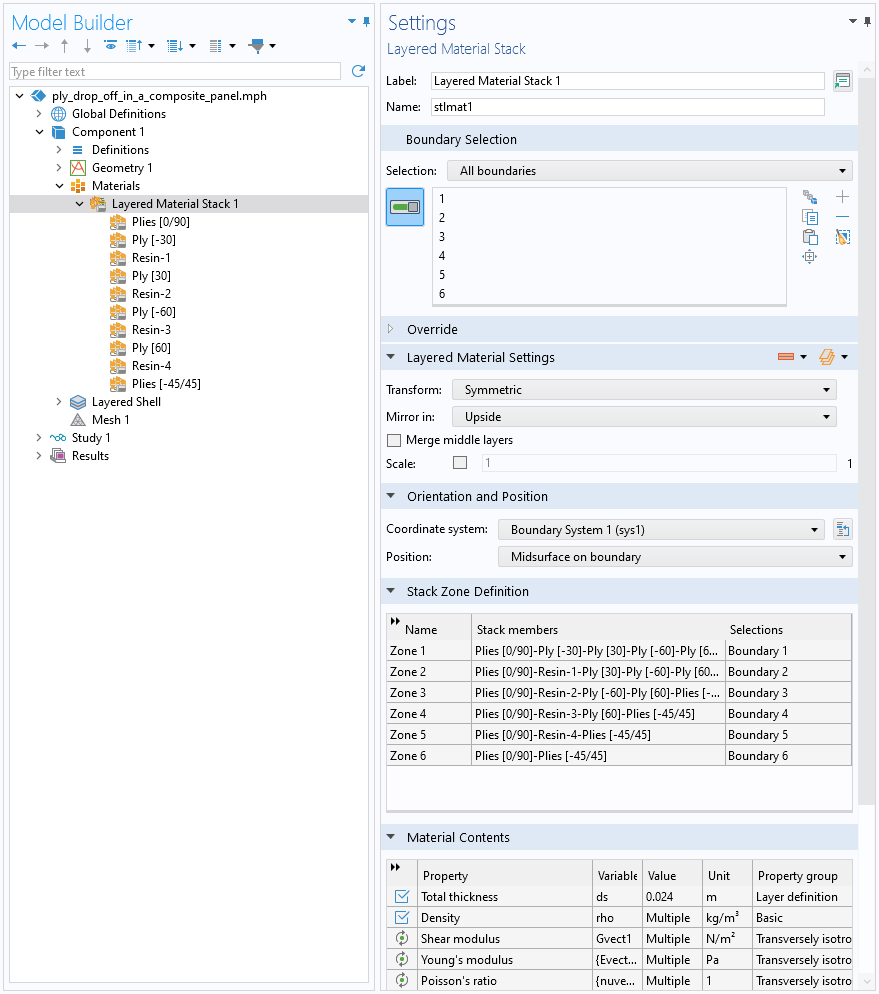
多层材料链接 和 多层材料堆叠 功能的应用示例。
请注意 单层材料 功能是为单层材料设计的特殊的 多层材料 功能。
经典层压板理论和物理场接口
现在,我们已经定义了层压板并将其添加到几何边界上。接下来,我们来介绍经典层压板理论。通常,我们会使用下列三种理论之一分析层压复合壳:
- 等效单层理论
- 经典层压板理论
- 一阶剪切变形层压板理论
- 高阶剪切变形层压板理论
- 三维弹性理论
- 三维弹性理论
- 分层理论
- 多模型方法
一阶剪切变形等效单层理论: 壳接口
在一阶剪切变形等效单层理论(ESL-FSDT)中,计算整个层压板的均质材料特性,并仅在中面上求解方程。该理论采用类壳公式,自由度为网格边界上的三个位移和三个旋转。该理论适用于薄至中等厚度的层压板,可用于计算总挠度、特征频率、临界屈曲载荷和面内应力等全局响应。相较于分层理论,ESL-FSDT 计算成本较低;但对于较厚的层压板,它需要一个剪切修正系数。

ESL-FSDT 理论中的自由度节点。
在 COMSOL Multiphysics® 中,壳 接口的 线弹性材料,多层;超弹性材料,多层 和 压电材料,多层 等多层材料特性都是基于 ESL-FSDT 理论。此外,膜 接口中的线弹性材料,多层功能也是基于等效单层理论,可用于对弯曲刚度忽略不计的极薄复合薄膜进行建模。
在风力发电机复合材料叶片的应力和模态分析案例模型中,风力涡轮机复合叶片是使用 壳 接口模拟的。目标是找出在重力和离心力作用下叶片的表层和隔板的应力分布情况。
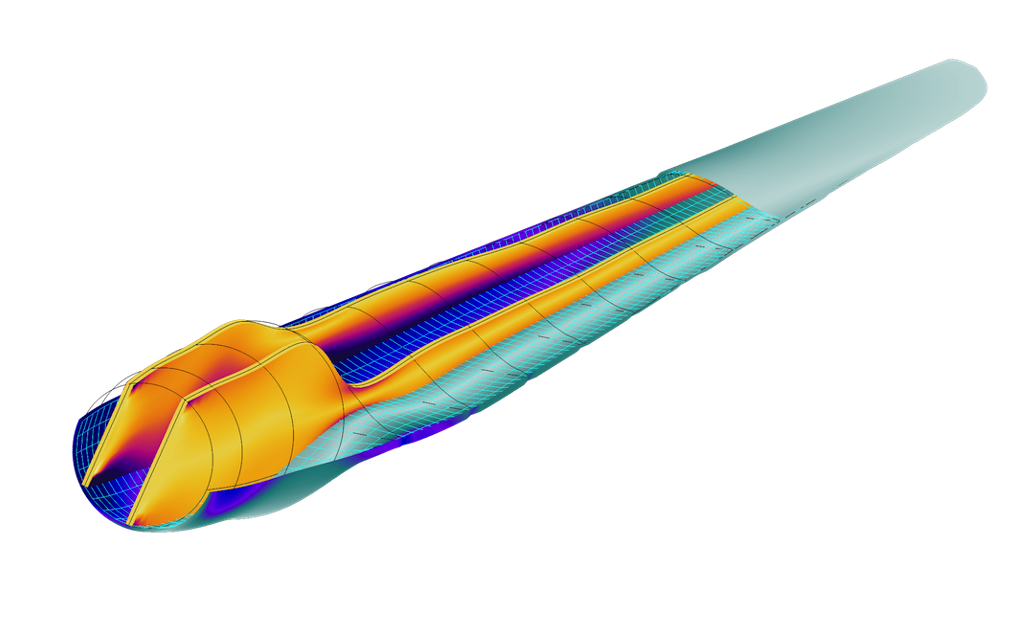
风力涡轮机复合叶片示例。叶片的表层和隔板的应力分布情况。
了解更多内容,请查看以下案例:
分层理论: 多层壳接口
在这个理论中,方程也在厚度方向上求解。因此,它可用于非常厚的层压板,包括分层区域。该理论采用类似固体的表述方式,其中自由度以三个位移的形式分布在厚度方向上。该理论适用于中等厚度到较厚的层压板,可用于预测正确的层间应力和分层,并进行详细的损伤分析。与 ESL-FSDT 理论相比,它支持非线性材料模型,并且不需要剪切校正因子。

分层理论中的自由度节点。
从公式的角度来看,分层理论与三维弹性理论非常相似。但是,相较于后一种理论,它具有以下优点:
- 层压板坐标系和层局部坐标系容易定义
- 面内和面外形函数可以具有不同的阶次
- 无需构建具有许多薄层的三维几何结构
- 面内有限元网格划分独立于面外网格划分
- 分层和界面数据容易处理
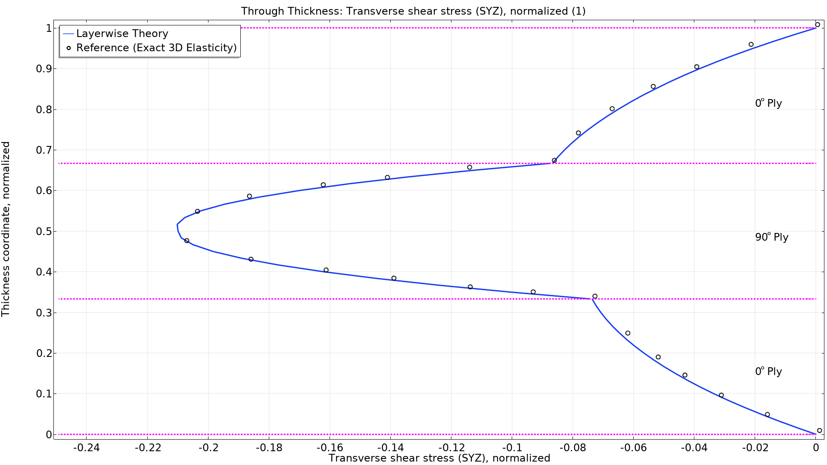
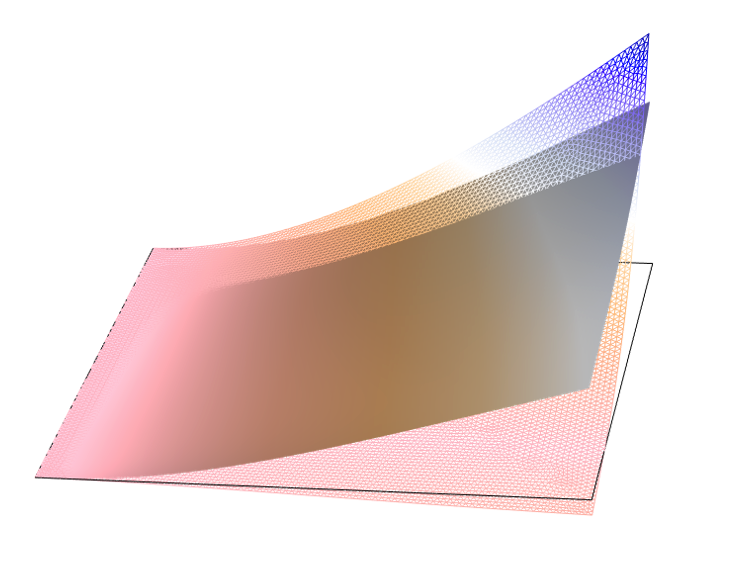
在 COMSOL Multiphysics® 中,多层壳 接口基于分层理论。简支复合材料层压板的弯曲案例模型中使用 多层壳 接口和 壳 接口对简支复合材料板进行了弯曲分析,目标是将两种接口得到的厚度应力与给定基准的三维弹性解进行比较。
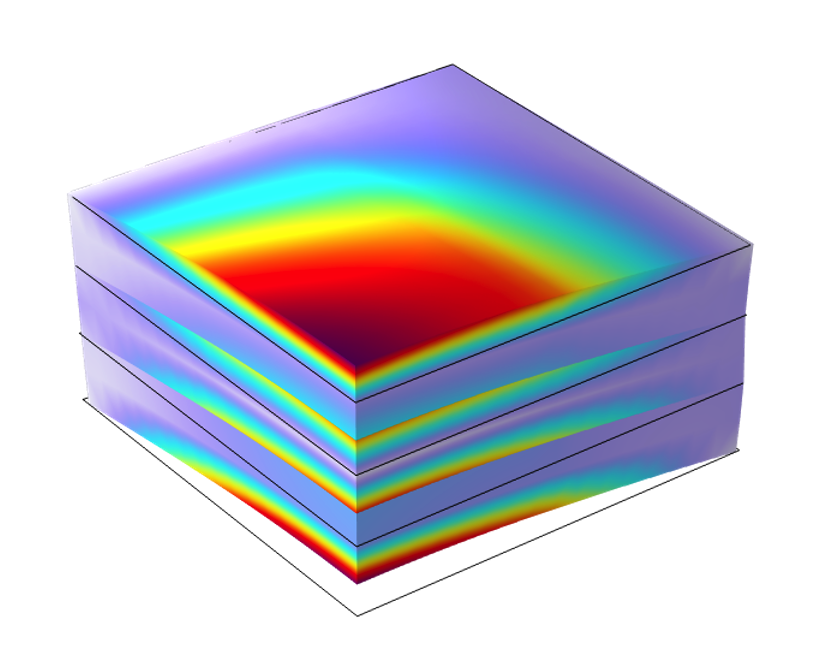
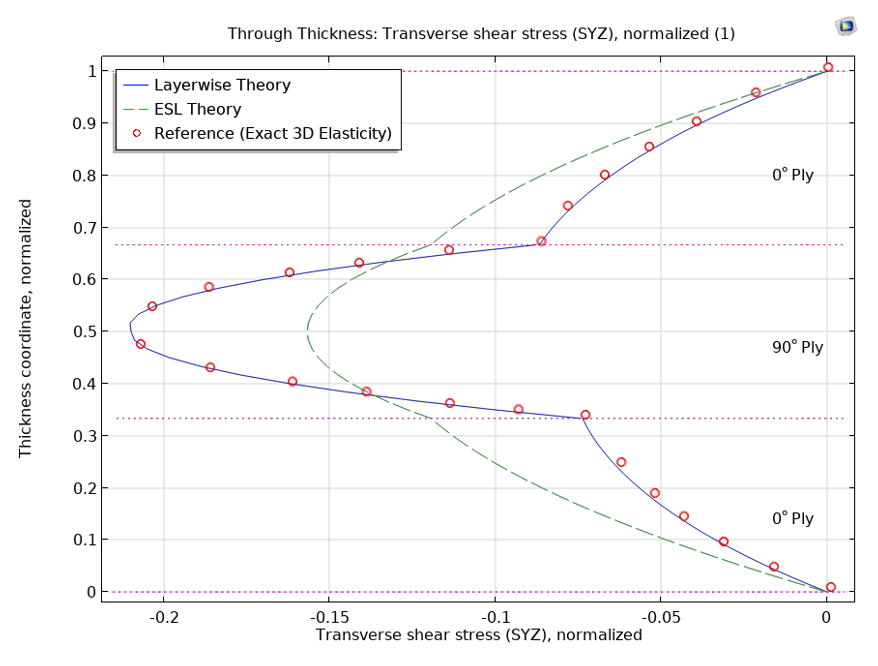
简支复合板示例。左图:使用 多层壳 接口模拟的板中的 von Mises 应力分布。右图:厚度横向剪应力对比图。
基于此理论的另一个示例,请查看复合材料层压板的强迫振动分析案例模型。
多模型法: 壳接口与多层壳接口耦合
多模型法是将等效单层理论与分层理论相结合,应用于复合材料几何结构的不同部位或不同层,以获得可接受的结果,并优化利用计算资源。除了 多层壳</em > 和 壳 接口外,还需要使用 多层壳-壳连接 多物理场耦合节点将这两个不同的物理场接口在厚度方向上进行耦合。
使用多模型方法分析复合材料叶片案例模型中通过耦合 多层壳 和 壳 接口模拟了一个复合材料叶片,旨在对比不同方法的求解时间。
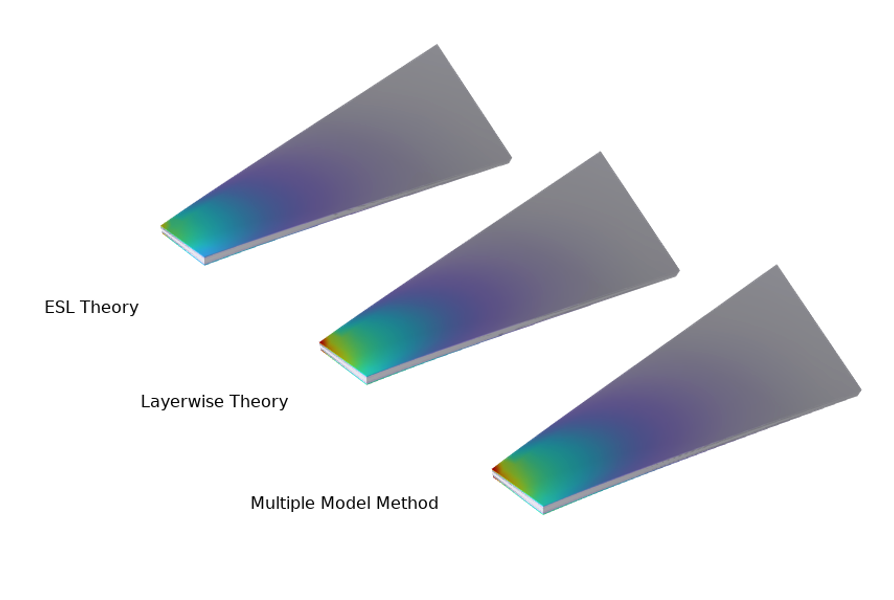
使用不同方法计算的复合材料叶片中的 von Mises 应力分布。
选择合适的层压板理论
基于上述方法,您可以选择合适的层压板理论。一个简单的经验法则是选择基于层压长宽比,即层压板长度与层压板厚度的比值的层压板理论。
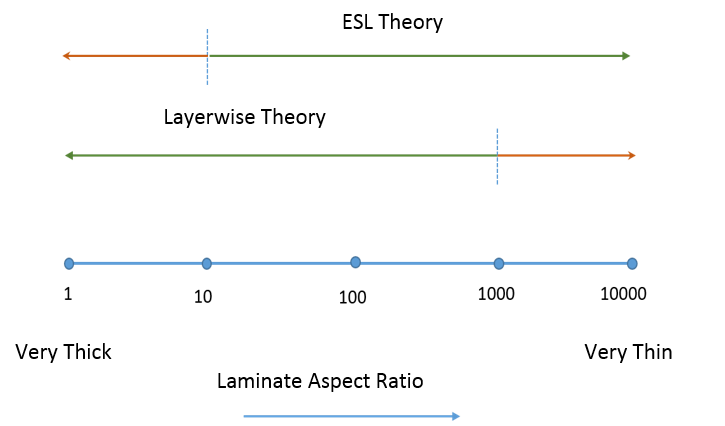
基于层压长宽比的两种层压理论的有效性范围。
材料模型
下表列出了不同物理场接口中用于分析复合材料的材料模型和非弹性效应。
| 材料模型 | 非弹性效应 | 物理场接口 |
|---|---|---|
| 线弹性材料 |
|
|
| 超弹性材料 |
|
|
| 压电材料 |
|
|
您也可以查看正交材料压力容器 – 壳版本和含压电材料的多层壳案例模型,了解更多内容。
损伤、脱层和首层失效理论
许多复合材料都是准脆性材料,在达到临界应力或应变水平后,初始弹性阶段随后进入非线性断裂阶段。当达到该临界值时,裂纹会逐渐扩展,直至材料断裂。裂纹增长导致的材料刚度下降可以通过多层壳和壳接口中的损伤功能进行模拟。目前有两种损伤模型可供选择:标量损伤模型和 Mazars 混凝土损伤模型。此外,还有几种应变软化损伤演变定律可供选择。为避免网格敏感性,可以选择裂纹带 或隐式梯度选项来使用空间正则化方法。
脱层或层间分离是层压复合材料的一种常见失效模式。包括载荷、材料缺陷和环境条件在内的各种因素都可能引发层间分离的发生和传播。要模拟脱层现象,可以使用 多层壳 接口中的 脱层 功能。脱层理论以内聚力模型(CZM)为基础,并包含多个牵引分离定律。要了解更多信息,请查看 COMSOL 案例库中的 复合材料层压板的混合模式脱层和层压壳中的渐进脱层案例模型。
多层壳 接口和 壳 接口的 安全 功能中提供了多种首层失效理论。具体来说,像 Tsai-Wu、Tsai-Hill、Hoffman、Hashin、Hashin-Rotem、Puck 和 LaRC03 等理论在复合材料仿真中非常有用。要了解更多信息,请参阅层压复合壳的失效预测案例模型。
屈曲
使用这两种层压理论中的任何一种都可能产生线性屈曲;不过,与分层理论相比,一阶剪切变形等效单层理论在寻找临界屈曲载荷系数方面更有效。它可以优化层叠结构,以使临界屈曲载荷最大化。更多信息,请参阅复合材料气瓶的屈曲分析案例模型。
多层材料连续性
如果在多层壳 接口所选的几何结构上激活了一个以上的单层材料、多层材料链接 或 多层材料堆叠,那么默认情况下,这些不同多层材料之间的自由度是断开的。使用 连续性 功能可以连接相邻的两个层状材料。利用该功能,您可以对层叠脱落情况进行建模。了解相关建模示例,请参阅 COMSOL 案例库中的复合板的削层模型。
当使用壳 或膜 接口时,自由度只存在于中面上,因此它们在分层材料之间总是连接的。
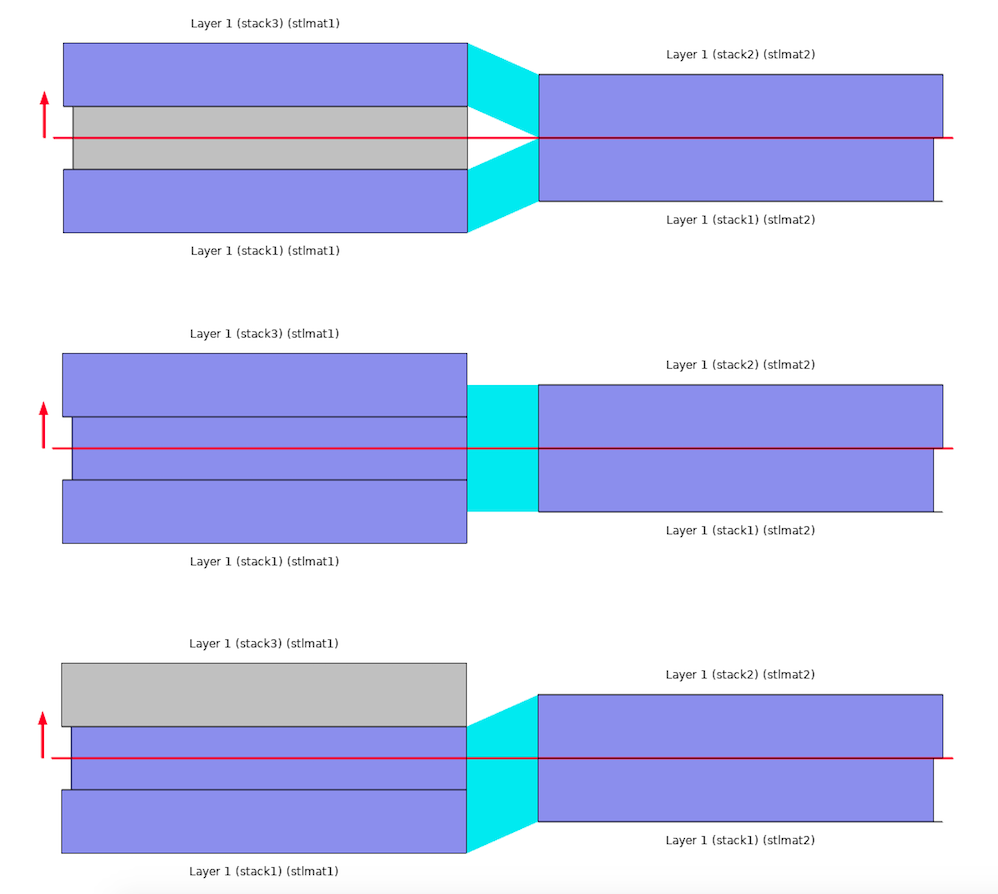
在并排放置的两块层压板之间设置连续性的不同方法。
A, B, D 矩阵计算
标准刚度和柔度矩阵可通过 壳 接口中的 线性弹性材料,多层 节点进行计算。可用的四个刚度矩阵包括拉伸刚度矩阵 (A)、弯曲-拉伸刚度矩阵 (B)、弯曲刚度矩阵(D)和剪切刚度矩阵(As)。更多详情,请查看层压复合壳的材料特性案例模型。
有时,复合材料层压板的材料特性由 A、B 和 D 矩阵提供。在这种情况下,可以使用 壳 接口中的 截面刚度 材料功能。
复合材料仿真的结果计算工具
在进行宏观力学分析时,COMSOL Multiphysics® 中有多种功能可用于结果计算。下面我们将讨论其中的一些功能。
多层材料数据
由于几何结构只包含表面,多层材料 数据集用于显示有限厚度几何结构的模拟结果。使用该数据集,可以在法线方向上缩放层压板厚度,非常适合分析薄层压板。 多层材料 数据集还提供在以下位置进行计算的选项:
- 网格节点
- 界面
- 层中面
多层材料 数据集包括选择和取消选择多层材料链接或多层材料堆叠中的不同层的选项。其他一些数据集,如镜像、数组、三维截线,三维截点 和 旋转,也可以与 多层材料 数据集一起使用。
体绘图和表面绘图
多层材料 数据集可直接使用不同的体图、表面图、切面图等。
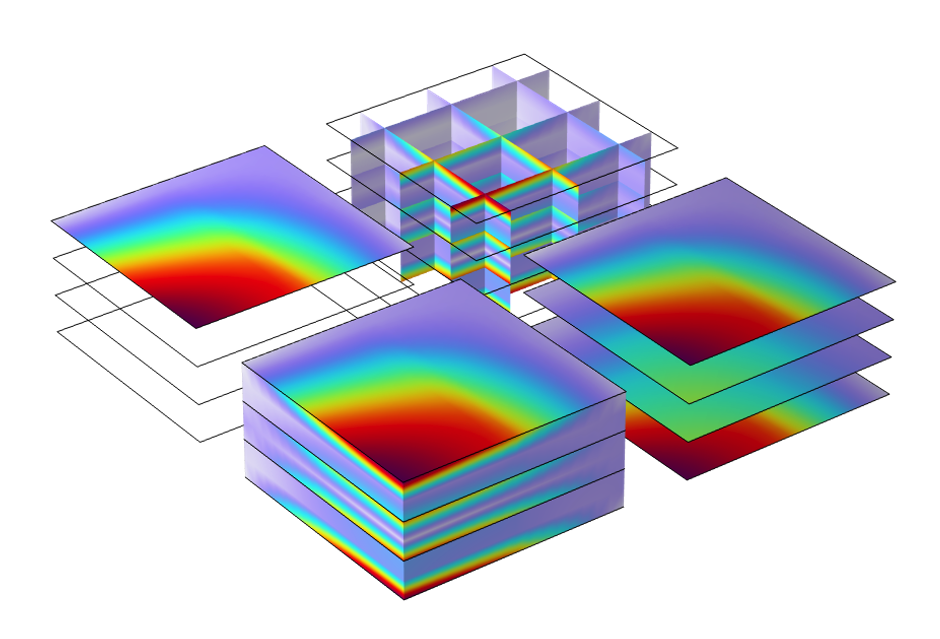
使用 多层材料 数据集绘制的各种结果图。
多层材料切面图
对于复合材料层压板,多层材料切面 绘图在制作切面时提供了更大的自由度。一些有用实例包括创建切面绘图:
- 通过一个或两个层
- 穿过多个(或所有)层(请注意,不需要在厚度方向上放置切面)
- 在层的特定位置,但不在中面上
使用 多层材料切面绘图创建的层压板每一层中面上的 Von Mises 应力。
全厚度图
该绘图用于确定不同量通过层压板厚度上的变化。您可以在边界上选择一个或多个几何点,也可以选择创建切截点数据集或直接输入点坐标。
层压板上某一点横向剪切应力在厚度方向的变化。
线图或点图
要创建特定变量的线图,需要使用基于 多层材料 数据集的 三维截线 数据集。同样,要创建特定变量的点图,也需要使用基于 多层材料 数据集的 三维截点 数据集。另一种解决方案,可以将包含特殊算子的变量与 多层材料 或 解 数据集一起使用。
复合层压材料的多物理场分析
结构连接
在大多数情况下,系统的结构分析需要使用不同的单元类型或物理场接口。下表列出了可用于连接不同结构物理场接口的多物理场耦合。
请查看多层壳与实体和壳的连接案例模型,了解连接壳和结构单元的示例。
热膨胀
可以使用下列物理场接口模拟复合结构中的热膨胀:
- 壳传热
- 壳 或者多层壳
不同物理场之间的耦合通过下列多物理场耦合节点来定义:
- 热膨胀,多层
有关建模示例,请查看案例库中的层压复合壳的热膨胀模型。
焦耳热和热膨胀
复合结构中的焦耳热和热膨胀可以使用以下物理场接口模拟:
- 多层壳中的电流
- 壳传热
- 多层壳
不同物理场之间的耦合通过下列多物理场耦合节点来定义:
- 电磁热,多层壳
- 热膨胀,多层
声 – 复合材料的相互作用
声–复合材料的相互作用可以通过以下物理场接口模拟:
- 压力声学
- 壳 或者 多层壳
声-结构边界 多物理场耦合节点用于定义这两个物理场接口之间的相互作用。
流体–复合材料的相互作用
流体–复合材料的相互作用可以通过以下物理场接口模拟:
- 层流
- 壳 或者多层壳
流-固耦合 多物理场节点用于定义这两个物理场之间的相互作用。
压电 – 复合材料的相互作用
压电 – 复合材料的相互作用可使用下列物理场接口模拟:
- 多层壳中的电流
- 壳 > 压电材料,多层 或者 多层壳压电材料
压电,多层 多物理场耦合节点用于定义这两个物理场接口的耦合。了解更多内容,请参见含压电材料的多层壳教程模型。
压阻 – 复合材料的相互作用
压阻 – 复合材料的相互作用可以使用以下物理场接口模拟:
- 多层壳中的电流压阻壳
- 多层壳
压阻,多层 多物理场耦合节点用于定义这两个物理场之间的相互作用。
集总机械系统 – 复合材料的相互作用
集总机械系统 – 复合材料的相互作用可使用下列物理场接口模拟:
- 集总机械系统
- 多层壳
集总结构连接 多物理场耦合节点用于定义这两个物理场接口之间的相互作用。
复合层压板的优化
复合层压板是一种合成结构,总是有可能在每层材料、每层厚度和铺层顺序等方面对设计进行优化。利用 优化模块 的功能,可以对复合层压板的不同要素进行优化。要了解此类优化,请查看铺层顺序的优化案例模型,其中根据 Hashin 失效准则对复合层压板的铺层顺序进行了优化。
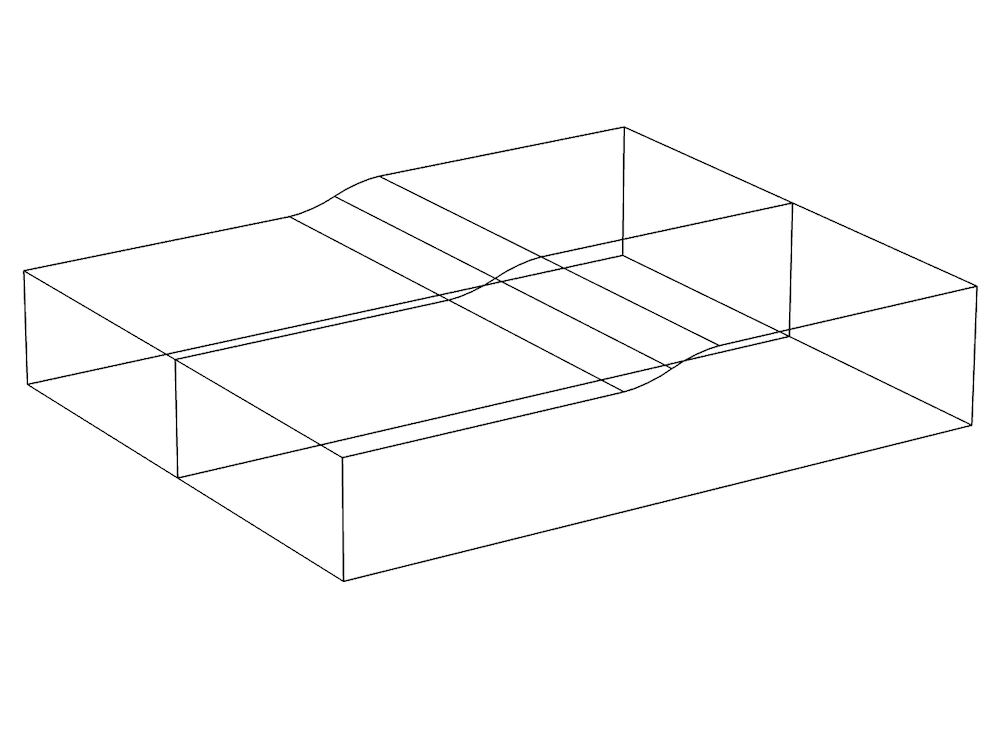
优化后的复合层压板示例。原始布局(线框)和优化布局(实体)的位移。
多尺度分析
复合材料既可以在宏观尺度上进行分析,也可以在细观尺度上进行分析,无论哪种分析都有其优点和局限性。通过宏观和细观分析,可以深入了解复合材料结构及其成分对宏观加载荷的响应。完整的多尺度分析包括宏观分析和每个材料点的细观分析,计算成本高昂。如果我们将分析限制为只包括几个关键材料点,就可以通过使用 固体力学 接口中的 单元周期性 功能和 多层壳 接口进行多尺度分析。
要查看多尺度分析的实际效果,请参阅失效的细观力学:复合材料结构的多尺度分析案例模型。在这个示例中,首先进行细观力学分析以获得均质材料属性,然后使用分层理论进行宏观力学分析以获得全局响应。最后一步是进行细观力学分析,计算局部应力场和应变场以及基于全局平均应变的失效风险。
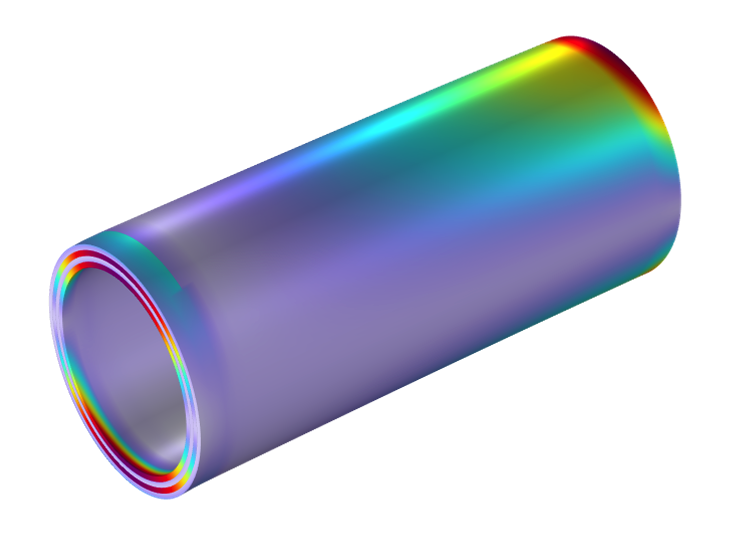
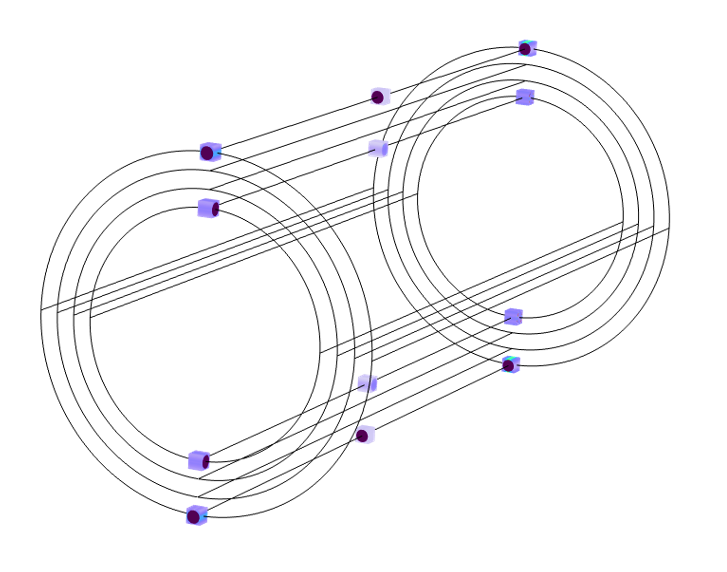
多尺度分析示例。左图:基于宏观力学分析的复合材料圆柱体应力。右图:使用细观力学分析法测量不同材料点的应力。
下一步
使用复合材料模块,您可以设计、分析和优化由线性或非线性材料组成的多层复合材料结构。要了解有关复合材料模块的更多信息,请点击以下按钮联系 COMSOL。
21 世纪初期,黑胶唱片已被人们遗忘在角落里,积满了灰尘。但之后发生了一些奇怪的事情。2008 年,全世界的音乐商店开始庆祝“唱片店日”。2020 年,黑胶唱片的销量创下了历史新高,自 1986 年以来首次超过了 CD 销量。事实证明,与使黑胶唱片重新流行的怀旧情怀一样,黑胶唱片的历史及其背后的科学同样让人着迷。
黑胶唱片的历史
圆筒留声机
1877 年,托马斯·爱迪生正在研究他最出名的两个发明:电话和电报。在这个过程中,他发明了电唱机(phonograph),作为一种播放录制声音的方式。在 1878 年 6 月的 North American Review 杂志上,爱迪生写道,他设想将“音乐再现”,以及听写、教育和报时(如语音时钟)作为该设备的未来用途。
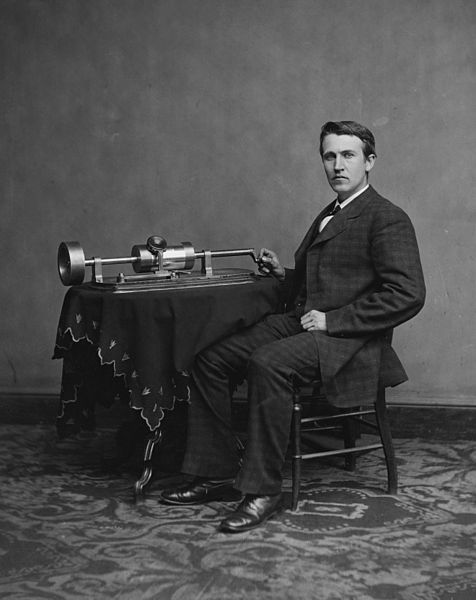
托马斯·爱迪生和留声机的早期原型。图片来自 Levin C. Handy — 美国国会图书馆。通过 Wikimedia Commons进入公共领域的图像。
19 世纪 80 年代,由亚历山大·格雷厄姆·贝尔经营的 Volta 实验室对爱迪生的设计进行了改进,并将改进后的设备称为留声机(gramophone)。留声机不像电声机那样从蜡制圆筒中读取声音,而是通过一个手摇机件来操作,使平板上的硬橡胶盘转动。1887年,德裔美国人发明家埃米尔·贝利纳开发出可以在留声机上播放的侧切平板,它的用途与外观与我们今天所知的黑胶唱片相似。
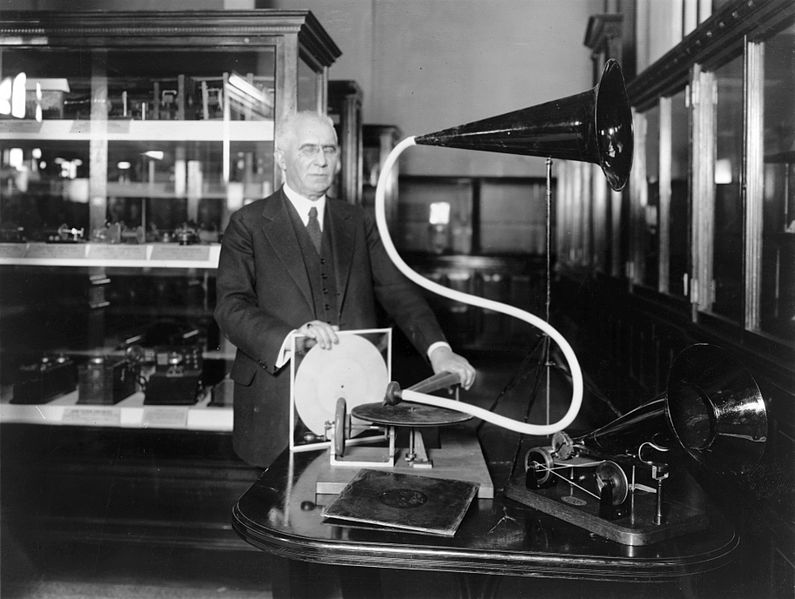
埃米尔·贝利纳 和一个早期的留声机侧切平板唱片。通过 Wikimedia Commons 进入公共领域的图像。
到 1892 年,电唱机和留声机开始向公众销售,前者被定位为“棕色蜡上的娱乐产品”。然而,早期用于留声机的蜡筒只能存储两分钟的录音,而且生产成本高,效率低下。
1901 年,复制蜡筒开始被批量生产。它们由模具制成,而不是用手写笔单独雕刻,并且使用了一种较硬的蜡。这些圆柱体有时被称为“金模”圆柱体,因为生产过程中使用的金电极会释放出金色的蒸汽。使用这种新工艺,一次可以制作 120-150 个圆筒。
78s
由贝利纳推广的平板唱片以约 78rpm 的速度播放,这就是为什么它们被大多数收藏家称为 “78s”。在改进蜡筒质量的基础上,这些圆盘每面可以储存 3-5 分钟的声音。它们由虫胶树脂制成,感觉比现代黑胶唱片更重、更脆。
二战期间,虫胶很难买到,所以一些 78s 开始用乙烯基材料代替。
“现代”乙烯基
到 1930 年,RCA Victor 公司推出了第一张商业化黑胶唱片。这张现代唱片的播放速度为 33⅓ rpm,而不是 78 rpm。这种唱片直径为 12 英寸,这意味着它可以播放更长的声音。1939 年,RCA 的竞争对手哥伦比亚公司也紧随其后发布了一种 12 英寸“长播放”33⅓ rpm 微槽唱片。作为回应,RCA 发布了一种较小的7英寸唱片,每面以 45 rpm 播放一首歌曲,称为 “密纹唱片”。
今天,唱片艺术家仍然将他们的作品称为黑胶唱片和密纹唱片(LP 和 EP),无论音乐是否有实体格式!
到了 20 世纪70年代,微型磁带(当时唯一的便携式听音乐的方式)和八轨磁带盒的推出使黑胶唱片退居次席。CD、数字下载和流媒体服务的推出又延续了这一趋势。
重回焦点:乙烯基复兴
自 2008 年“唱片店日”的出现以来,黑胶唱片与其他媒介相比越来越受欢迎。黑胶唱片的销量稳步攀升,仅 2019 年到 2020 年,其销售额就增长了 46%!这种需求激增导致世界各地的唱片压制厂出现严重瓶颈,有些工厂需要长达 8 个月的等待时间才能获得订单和发货!
前面,我们已经回顾了黑胶唱片的历史和它蓬勃发展的流行。接下来,让我们来看看它们是如何演奏音乐的,它们最初是如何制作的,以及所涉及材料背后的科学……
唱片是如何播放音乐的?
黑胶唱片能够通过唱机播放声音的方式是一个有趣的过程。黑胶唱片(也叫做漆盘)被压制成有凹槽的压痕(这可能是“groovy!”一词的来源)。这些凹槽充当了原始艺术家录音的声波的”指纹”。
如果要播放一张唱片,你需要把它放在唱机上,唱机有一个旋转的底座和一个细长的唱臂。唱臂末端有一个唱头,唱头由钻石或蓝宝石制成。当唱机旋转时,测针在唱片的凹槽中振动。
唱臂末端的唱头包含一个压电晶体。当测针在凹槽中振动时,它会通过墨盒产生电信号。然后该信号被反馈到唱机的放大器。
当唱片播放时,触针从唱片的外缘向中间移动,通常速度为 33⅓ rpm,这样每面都有 20- 30 分钟的声音。(许多唱片艺人在为他们的专辑排序时花了很多心思和精力,会使 A 面结尾的歌曲更有节奏感和活力,让人想翻开唱片继续听)。

唱机上的黑胶唱片,右上角显示了唱臂、唱头和测针。
音乐发烧友们经常唠叨,黑胶唱片比 CD 或流媒体服务具有更好的聆听体验。为什么会这样呢?差异可能归结于模拟录音和数字录音。黑胶是模拟录音的,这意味着唱片的凹槽是实际录音的物理表现。其他现代格式是数字录音的,这意味着录制的音乐被转化为一组离散的数字。也许这就是为什么黑胶唱片的声音经常被描述为比数字播放”更温暖”或”更真实”的原因,尽管这往往是争论的焦点。
黑胶唱片是如何制作的?
黑胶唱片的生产过程既费时又费钱,并且在生产车间开始之前就开始了。首先,录制的音乐必须通过一个称为 母带处理 的优化过程来转换为黑胶唱片。这时,经过专门培训的音响工程师会确保音轨的水平、限制、均衡和排序都达到最佳质量。
接下来,通过一种被称做车床切割 的技术将母带文件印在漆板上。使用一支钻石测针将唱片的凹槽直接刻在铜制母带上。
然后,使用如下所述的电镀 技术制作唱片:在漆过的母盘上喷上银溶液,以增强其抵抗大规模复制产生的压力,然后将它放在镍浴中形成一个”压模”。这个”压模”有一个凸起的凹槽,用于形成黑胶拷贝中的凹槽。通常,需要制作多个母盘和压模,尤其是当工厂需要完成较大(>10000 个)的订单时。每个压模通常可以制作大约 1500-2000 张,然后才会磨损并无法再使用。
电镀后,压模被送到液压机上。预热过的聚氯乙烯 (PVC) 颗粒混合物被制车称为“饼干”的固体圆盘,然后将其加热至 148°C (300°F) 并在液压机内以超过 2000psi 的压力压缩约 8 秒。压模就像华夫饼熨斗一样,在压平饼干的同时将凹槽图案压入饼干中。

唱片压制厂的液压机,正在制作 Alicia Keys 专辑 As I Am 的副本。图像由David McClister提供自己的作品。通过 Wikimedia Commons在公共领域共享。
新压制的唱片会在水浴中再冷却 8 秒,然后将它们修剪成最终的形状,并被磨圆。唱片还要经过最后的固化过程,这对于避免以后变形很重要。
唱片厂通常在生产整批唱片之前都会进行试压。这样,唱片公司和独立艺术家可以在生产数百或数千张有缺陷的唱片之前,进行质量把控。
有趣的事实:唱片为什么是黑色的?
唱片可以看似可以被压制成无穷无尽的各种颜色和图案,制作珍藏版本,这是收藏家的梦想。

我个人收藏的黑胶唱片的白色、深紫色和赭色/棕褐色变体。
然而,根据Furnace Record Pressing 的说法,黑胶唱片最常采用黑色 PVC 压制,这可以用静电来解释。
事实证明,PVC 是一种天然绝缘体,随着时间的推移会产生静电,而这种电荷会吸引灰尘。灰尘是黑胶唱片最大的敌人:它会积聚在凹槽里,磨损唱片机的触针。将炭黑添加到PVC混合物中,是为了增加材料的整体导电性,这意味着随着时间的推移,静电和灰尘在唱片上的积累会减少。
根据个人经验,黑色唱片似乎也很容易积灰,所以在收起来之前最好先把它擦干净!
黑胶唱片背后的材料科学
黑胶唱片的主要成分不是节奏、旋律或灵魂,而是聚氯乙烯,一种由氯和乙烯组成的聚合物。乙烯是通过加工石油、煤炭和天然气等碳氢化合物原料制成的,而氯是通过在膜电池电解槽中电解盐水来制造的。这两种材料结合起来形成二氯化乙烯,然后转化为氯乙烯单体,或称为 VCM。

粉末状的纯聚氯乙烯。图片由 LHcheM提供自己的作品。通过Wikimedia Commons 获得许可(CC BY-SA 3.0)。
最后的聚合过程包括将 VCM 转化为实际的乙烯基聚合物,即 PVC。然后,将化学改性剂添加到混合物中,以实现成品的特定质量。
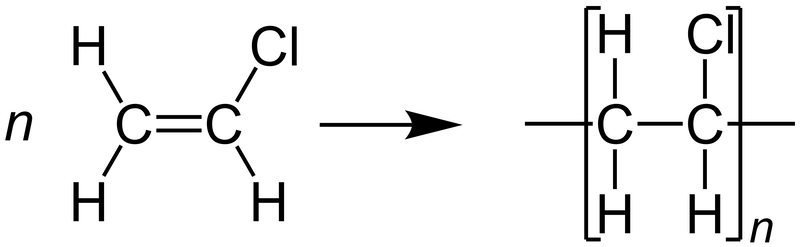
聚氯乙烯聚合过程的分子结构。图片由 Jü 提供自己的作品。图像通过Wikimedia Commons进入公共领域。
使得 PVC 成为黑胶唱片的最佳材料的一个因素是,它有 10%-20% 的结晶度。这意味着它的强度足以支持在生产过程中支撑唱片的凹槽,并且可以承受转盘触针的应用压力。
添加剂
尽管 PVC 约占黑胶唱片的 96%,但混合物中还添加了其他成分,用于赋予某些重要特性。例如,稳定剂约占黑胶唱片材料的 1.5%。它们使树脂混合物更加坚固。在压制过程中,稳定剂用于中和由液压机蒸汽的高温产生的氯化氢气体。
增塑剂只占混合物的不到 1%。它们提高了唱片的柔韧性,使其在制造过程中更容易与母盘上的凹槽相匹配。润滑剂也只占不到 1%,它可以改善压制过程中树脂的流动性,也可以减少操作过程中唱片表面的摩擦。
最后,大约 0.5% 的成分是炭黑,我们已经提到过,它可以减少静电积聚,也可以使唱片表面的划痕更容易被看到。有时,着色剂和从其他唱片中回收的乙烯基会被添加到炭黑混合物中。
黑胶唱片的未来
音乐行业尤其难以预测。谁会想到一百多年前发明的一种演奏音乐的方式会在今天流行起来?
在科学方面,工程师们正在寻找改进唱片机、唱片压制技术和唱片制作材料的方法——所有这些都是为了使制作过程更加环保。
我们从 A 面翻转到 B 面,然后又再回来时,我迫不及待地想知道黑胶唱片世界的未来发展是什么!
延伸阅读
- 阅读有关材料科学应用的更多信息:
- 查看音乐和科学如何结合的其他例子:
今天的客座博主是来自Lightness by Design公司的 Björn Fallqvist 博士,他在文中讨论了分析热机械疲劳的不同考虑因素和方法。
在这篇博客文章中,我们研究了 COMSOL Multiphysics® 软件中用于分析热机械疲劳的相关材料模型(模型使用了来自热机械疲劳测试的实验数据,以及参考文献中的材料参数)。随后,对在高温下运行的压力容器进行了分析,并使用非线性连续疲劳损伤模型评估疲劳寿命。
为什么要分析热机械疲劳?
在许多应用中,传统的等温疲劳分析是不够的,因为部件在高温下或在高温循环下工作时,材料性能与室温有很大不同。这种应用的典型例子是涡轮机和发电厂部件。
传统的疲劳分析,尤其是高周疲劳(high-cycle fatigue,HCF),不能直接考虑高温造成的影响。在高周疲劳区域中,载荷较低,蠕变等影响可以忽略不计。有时,S-N 曲线会减小,以解决温度升高时疲劳强度降低的问题。然而,这没有考虑到温度和载荷同时循环时的影响,即所谓的热机械疲劳。这种温度变化的影响在低周疲劳(low-cycle fatigue,LCF)区域中尤为重要,在该区域,需要考虑多个方面,主要是弹塑性和蠕变的材料性能变化。
评估高温下疲劳性能的一种方法是使用样品在多个温度下的稳定(通常是寿命中期)应力-应变曲线,以获得应力或应变幅度,并确定控制非线性应力-应变曲线的硬化参数。理论上,人们可以用一组特定的外加载荷和温度组合进行实验,并尝试根据实验结果估算疲劳寿命。然而,热机械疲劳测试需要相对较长的时间,并且成本较高。评估高温下疲劳能力的一种更方便的方法是使用描述应力水平和失效循环关系的解析表达式,并根据温度对其进行修正。
热机械疲劳试验
在热机械疲劳试验中,试样通常同时承受循环应变和循环温度。这可以是同相(IP)或异相(OOP)。对于前者,最大拉伸载荷与最高温度同时出现,对于后者,最大拉伸载荷出现在最低温度时。
为了与本篇博文中的实验结果进行比较,我们参考了参考文献 1,其中研究了 P91(一种常见的电厂用钢) 的热机械疲劳。我们从参考文献 2 中获得了模型材料参数,获得了应力-应变曲线。值得注意的是,对于参考工作,使用统一的模型(即黏塑性应变由塑性和蠕变分量组成)。然而,这只会影响模型蠕变部分的值。
热机械疲劳分析的材料模型
作为温度的函数的材料模型参数(参考文献2)如下表所示:
| Temp [°C] | E [MPa] | k [MPa] | Q [MPa] | b [-] | a1 [MPa] | C1 [-] | a2 [MPa] | C2 [-] | Z [MPa s1/n] | n [-] |
|---|---|---|---|---|---|---|---|---|---|---|
| 400 | 187,537.0 | 96 | -55.0 | 0.45 | 150.0 | 2350.0 | 120.0 | 405.0 | 2000 | 2.25 |
| 500 | 181,321.6 | 90 | -60.0 | 0.6 | 98.5 | 2191.6 | 104.7 | 460.7 | 1875 | 2.55 |
| 600 | 139,395.2 | 85 | -75.4 | 1.0 | 52.0 | 2055.0 | 463.0 | 463.0 | 1750 | 2.7 |
表 1 作为参考的材料参数
参数 a 和 C 与非线性运动硬化模型有关,E 是弹性模量,k 是初始屈服应力,Q 和 b 是各向同性硬化参数, Z 和 n 是黏塑性流动速率的材料参数。
这些将在下面的章节中阐述。综合起来,这些参数决定了屈服面在应力空间中的平移和膨胀/收缩。模型中的所有参数值都在温度之间进行插值。后续章节中,我们将介绍这一点的实现。
黏塑性
根据参考文献5,通过使用黏塑性 Chaboche 公式计算粘塑性应变张量的速率,考虑了速率相关效应
这里,A 是速率因子(设置为等于 1/s),F 是屈服函数),nD 是应力偏离的张量方向,n 是材料参数,是参考应力值。
经检验,COMSOL Multiphysics 参数 σref 和 n 分别等于表 1 中的 Z 和 n,。屈服函数 F 被定义为
这里,R 是屈服面的增加,k 是初始屈服应力,是运动硬化引起的背应力张量。
选择函数 φ 作为 von Mises 等效应力。
各向同性硬化
屈服面尺寸 σy 的各向同性硬化定律(Voce)被定义为
其中,σsat 是大塑性应变下屈服面尺寸的饱和应力,β 是材料参数,是等效黏塑性应变。
根据这个公式,取决于饱和应力值,屈服面可能会随着塑性应变的增加而膨胀或收缩。COMSOL Multiphysics 中的参数 σsat 和 β 分别 对应于表 1中的 Q 和 b。
运动硬化
所选择的非线性运动硬化定律是 Chaboche 硬化,其中背应力张量由 j 个 Armstrong–Frederick 非线性硬化项的分支叠加组成:
第一项是初始运动硬化模量,在我们的分析中忽略不计。与参考文献1–2中使用的公式相比,COMSOL Multiphysics 中的两个分支硬化参数 C 和 γ 分别是 Ca 和 C。
蠕变
如前所述,在参考文献中,作者使用了统一的黏塑性模型,直接定义了黏滞应力。在COMSOL Multiphysics中,我们使用Norton蠕变模型计算蠕变应变率:
这里,Ac 是速率因子,σeff 是等效应力,σref 是基准应力值(设定为 1MPa),nc 是材料参数。这些参数的值来自参考文献6。
在 COMSOL Multiphysics® 中使用的材料参数汇总
分析中使用的材料参数汇总如下(表2)。请注意,在大多数情况下,参数名称已经更改,以反映 COMSOL Multiphysics 中的标签。而且,常数 C 的定义与中参考文献使用的定义不同,因此它们采用不同的值。
| Temp [°C] | E [MPa] |  [MPa] [MPa] |  [MPa] [MPa] | β [-] |  [MPa] [MPa] |  [-] [-] |  [MPa] [MPa] |  [-] [-] |  [MPa s1/n] [MPa s1/n] | n [-] |
|---|---|---|---|---|---|---|---|---|---|---|
| 400 | 187,537.0 | 96 | -55.0 | 0.45 | 352,500 | 2350.0 | 810,000 | 405.0 | 2000 | 2.25 |
| 500 | 181,321.6 | 90 | -60.0 | 0.6 | 215,870 | 2191.6 | 863,810 | 460.7 | 1875 | 2.55 |
| 600 | 139,395.2 | 85 | -75.4 | 1.0 | 106,860 | 2055.0 | 810,250 | 463.0 | 1750 | 2.7 |
表2 COMSOL Multiphysics 中使用的材料参数。
蠕变参数  ,
, MPa,
MPa, ,泊松比 0.3,热膨胀系数
,泊松比 0.3,热膨胀系数  ,在所有温度下都相同。请注意,蠕变参数是在873 K下测量的,尽管COMSOL Multiphysics中也包含温度依存性。
,在所有温度下都相同。请注意,蠕变参数是在873 K下测量的,尽管COMSOL Multiphysics中也包含温度依存性。
非线性连续损伤疲劳模型
背景
我们在疲劳分析中使用的疲劳模型是 Chaboche 提出的非线性连续疲劳损伤模型(参考文献3)。这种模型很有吸引力,因为它的易用性,并且对于低循环疲劳和高循环疲劳(适用于钢)都有效。简而言之,它是基于以下形式的速率损失方程
损伤变量 D 相对于循环周期 N 的比率取决于最大应力  ,平均压力
,平均压力  ,以及当前的损坏。通过对函数 f 的特定选择,最终得到(这里省略了推导)与失效循环数 NF 的关系:
,以及当前的损坏。通过对函数 f 的特定选择,最终得到(这里省略了推导)与失效循环数 NF 的关系:
这里, 和
和  是材料参数,
是材料参数, 是极限抗拉强度,根据下面公式,
是极限抗拉强度,根据下面公式, 是平均应力的疲劳极限 :
是平均应力的疲劳极限 :
这里, 是材料参数。
是材料参数。
最后, 被定义为
被定义为
其中, 为材料参数。
为材料参数。
在热机械疲劳中,当温度 T 发生变化时,有效温度(T *)可以根据以下公式在一个循环周期内计算:
本质上,有效温度 T * 被认为是计算相同循环次数 NF 的温度,即极端温度在某个时间跨度内的平均循环次数。
疲劳数据和假设
在室温下,P91 钢的极限抗拉强度为 600MPa(参考文献7),疲劳极限约为 420MPa(摘自 参考文献6,以及在不同应力水平下的失效循环次数。这些可以用来确定由Chaboche疲劳模型(图1)定义的S-N曲线的最小二乘拟合。这里,载荷比 R( ,最小应力与最大应力之比)为 R = -1; i.e.,
,最小应力与最大应力之比)为 R = -1; i.e.,  ,
,  和
和  用于参数确定。
用于参数确定。
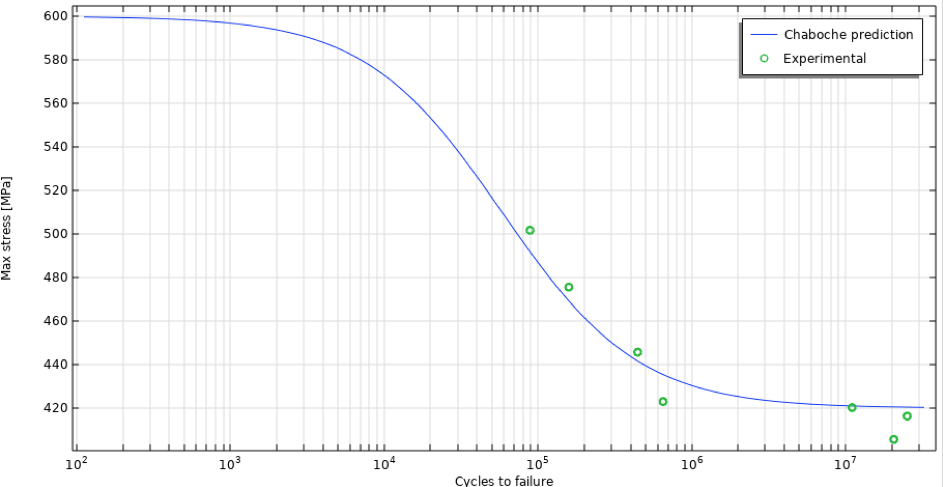
图1 由 Chaboche 疲劳模型定义的 S-N 曲线。
结果参数  ,
,  , 和
, 和  MPa。
MPa。
理想情况下,中间区域需要更多的点来完全定义曲线,但是对于方法演示来说,这就足够了。由于考虑热效应是至关重要的,因此 S-N 曲线必须按比例缩放。有几种方法可以做到这一点,最合适的方法是利用不同温度下的曲线,获取每个温度下的材料参数,然后对这些参数进行插值。但是,由于缺乏此类数据,因此根据参考文献 1 中的图 3.24 定义的折减系数,可以非常方便地来缩放极限抗拉强度和疲劳极限。所得的 S-N 曲线如图 2 所示。注意,这些都是针对 R=-1 的。
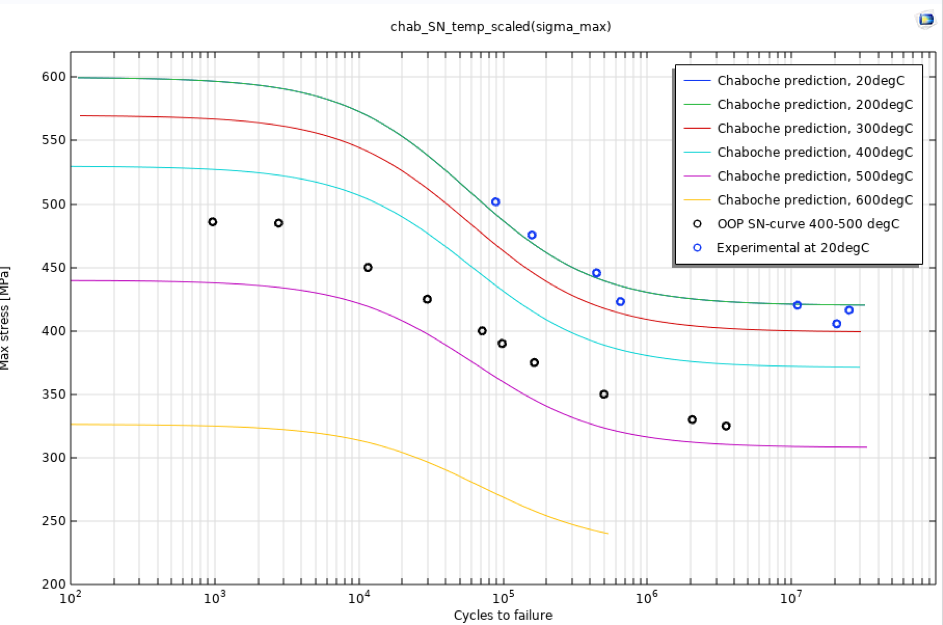
图2 降温后的 Chaboche S-N 曲线。
在下一部分,我们将显示这些温度曲线的缩放实现。还包括由参考文献 2 设置定义的,假定异相温度在 400°C 和 500°C 之间循环,对于选定数量的应力水平计算疲劳失效周期。。
当需要考虑平均应力效应时,参数 是必需的。必要时,使用相对于平均应力的 Goodman 疲劳极限降低法,即当  ,
,  时。可以得到
时。可以得到  / MPa。
/ MPa。
计算模型
背景:实验比较
参考文献 2 中进行了热机械疲劳测试(等温和异相)。单轴拉伸实验在高温下进行,包括等温和非等温条件。为了演示定义热机械疲劳分析所需步骤的过程,在 COMSOL Multiphysics 中复现了实验设置和测试程序,并将已发表的实验结果与分析结果进行比较。
背景:疲劳评估
为了展示比试样更真实的情况,对承受循环温度和压力载荷的压力容器进行了疲劳分析。由此产生应力状态定义了疲劳计算的输入,并估计了失效循环次数。
几何模型:实验比较
参考文献 2中 显示了样品的几何形状。对于循环应力-应变曲线的简单计算,仅将狭窄区域的一半进行轴对称建模就足够了;详请参见图3。请注意,偏离轴向是由于样品上有一个孔。
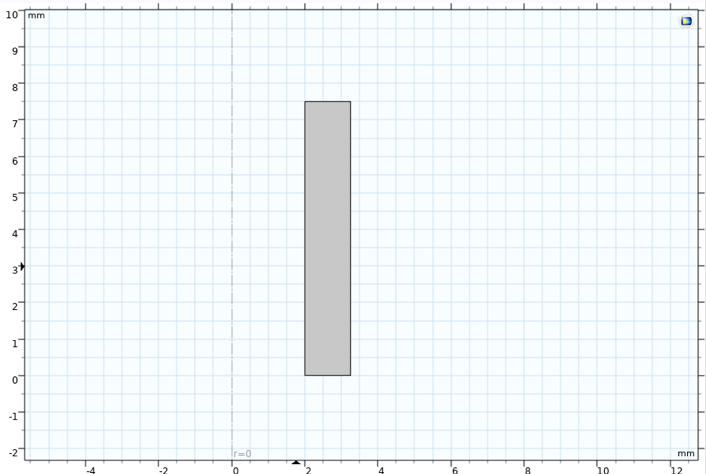
图 3 试样的轴对称模型。
几何模型:疲劳评估
代表热机械疲劳真实情况的压力容器,总长度为6000毫米,内径为950毫米,厚度为50毫米。这可以很容易地将它模拟为轴对称模型,参见图4。
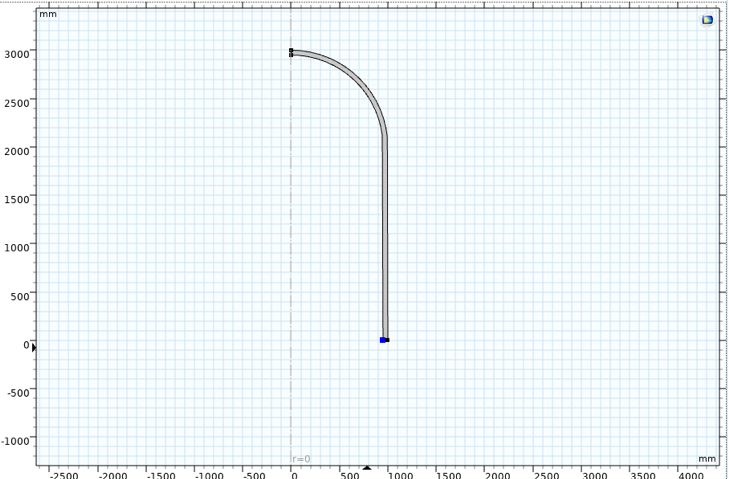
图4 轴对称压力容器模型。
网格:实验比较
在非常均匀的载荷下,网格可以非常粗糙。在这里,它被设置为自由三角形网格,最大单元大小为 0.75mm,如图 5 所示。
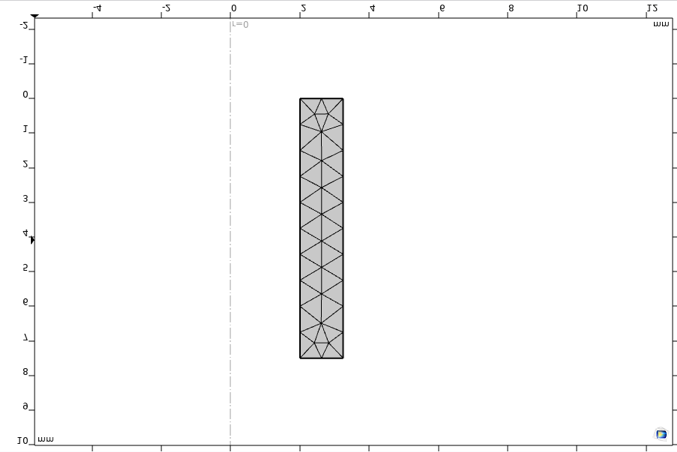
图5 单轴试样网格。
网格:疲劳评估
压力容器模型采用自由三角形网格划分,最大网格尺寸为50 mm,如图6所示。要确保厚度方向上始终存在一个以上的单元,在本篇博文中,出于演示目的,这点并不重要。
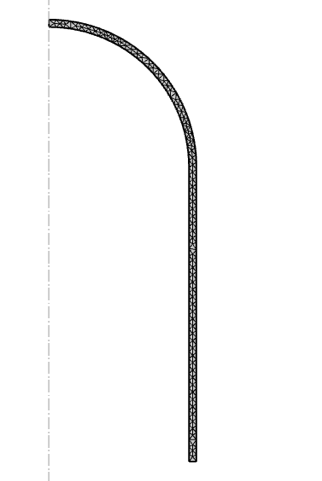
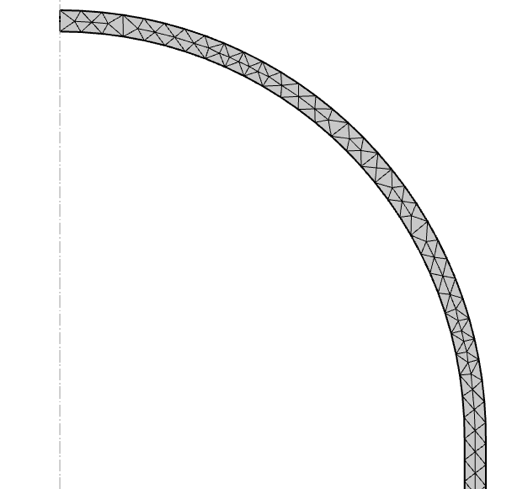
图6 压力容器的网格。
物理场设置:材料、载荷和边界条件(实验比较)
在 COMSOL 中,固体力学 接口用于热机械疲劳分析。首先,必须定义材料。为了实现上一节中描述的模型,我们添加了黏塑性和蠕变的节点,如图7所示。
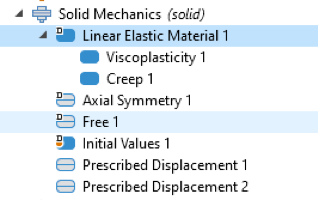
图7 材料定义的必要节点。
对于线性弹性、黏塑性和蠕变节点,适当的材料参数以与温度相关的形式输入,下一节我们将对此进行演示。
由于模型是轴对称的,因此只需要轴向约束。在 z=0 处,底部边界在 z 方向上受到约束。然而,顶部边界被指定为相应载荷工况下测得的应变位移。
物理场设置:材料、载荷、边界条件(疲劳评估)
对于压力容器,材料设置是相同的。同样,对称边在 z=0 处在 z 方向上受到约束。对内壁边界施加压力。该压力载荷为 R=0 负载情况,最大压力为 170bar。温度循环的温度高于实验对比的温度,最高温度(600°C)在 0bar 时,最低温度(500°C)在 170bar 时,加载速率为 5.67bar/s。
研究设置:实验比较
利用蠕变和黏塑性材料模型进行时间相关的研究是必要的。
在等温测试中,初始循环用于比较。应变率为 0.1%/秒时,初始循环时间为20秒。输出时间选择为 2.5 秒。时间步长手动设置为 0.25 秒。
对于非等温情况,使用第50次循环用于实验对比。应变速率为 0.033 %/s,初始循环时间为 60s,总时间为 3000s。输出时间选择在 2.5s,时间步长设置为 1s。温度速率为 3.33℃/s。
研究设置:疲劳评估
对于压力容器分析,载荷和温度速率与非等温实验比较相同。输出和时间步长设置也相同。
定义函数和变量
建立一个适合热机械疲劳分析的模型本身并不一定很复杂,但是上述框架包含很多方面。首先,有必要为温度和与温度相关的材料参数以及载荷的一致变化建立一个框架。在 COMSOL Multiphysics 中,通过使用函数和变量可以方便地进行处理。在本节中,将使用非等温分析(用于实验比较)概述这个方法。
参数
我们首先定义不受解决方案影响的全局参数,包括几何形状、载荷、材料蠕变和材料疲劳参数(见图8)。

图8 全局参数。
现在,标称载荷值(如温度和位移)可以通过简单的比例函数来确定载荷。
温度函数
在等温实验中,温度恒定在 400°C。非等温实验要求温度定义为最小应变时的最高温度(500°C),最大应变时的最低温度(400°C)。这种变化是通过创建波形和解析函数获得的,见图9。


图9 温度函数,非等温载荷。
然后,将温度作为变量(TempVar)应用于模型域,见图10。

图 10 将温度定义为域变量。
对于压力容器,温度在 500°C 和 600°C 之间循环,如图 11 所示。温度在模型中同样表示为域变量。
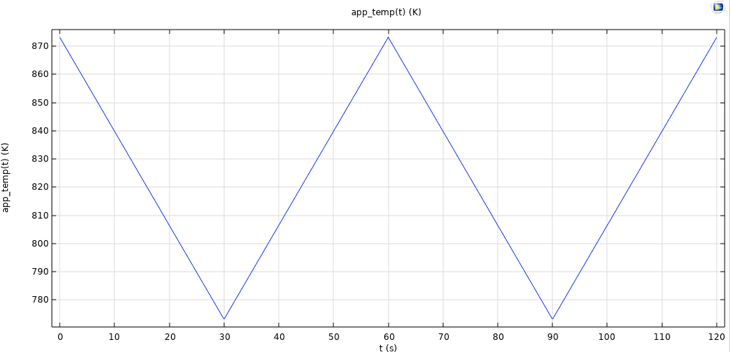
图11 温度函数,压力容器案例。
引入的温度变量可用于确定材料特性的变化,但不考虑热膨胀。由于总应变(机械应变和热应变)是由机器控制的,因此在实验情况下这并不重要,但通常应考虑由于热膨胀引起的热应变。为此,可以添加 固体传热 物理场接口,并添加逐点约束以根据需要强制执行温度,参见图 12。
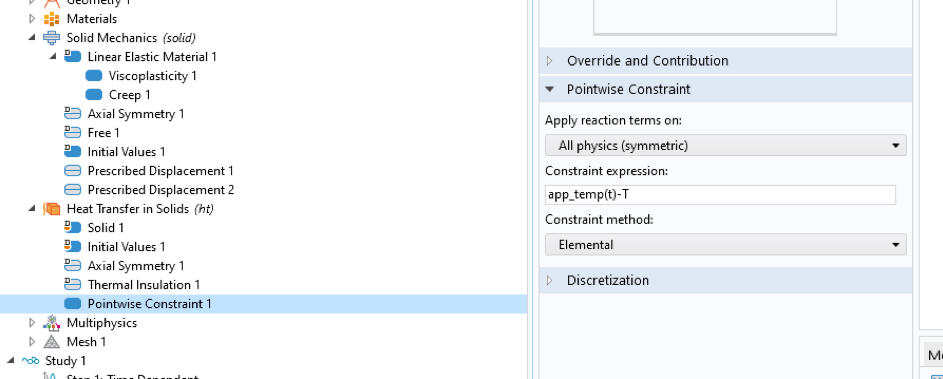
图12 固体传热物理场接口。
当然,均匀的温度分布在现实中是很少的。适当的传热分析也可用于获得温度场。必须为传热分析指定参考温度,即热应变为零的温度,也就是(热)无应力配置。虽然通常这是在室温下进行,但对于疲劳分析来说,通常重要的是温度载荷范围和平均值。因此,在分析中,将参考温度被设置为 873K,即循环的最高温度。
载荷函数
与温度定义类似,载荷(在此实验情况下为位移)也由两个单独的函数定义:波形函数和解析函数(见图 13)。


图13 载荷函数、等温载荷工况。
这个特殊的数字是特定的非等温实验情况。在等温和非等温情况下,应变率不同。后者应变速率为 0.1%/s,前者为 0.033%/s,分别对应于 7.5µm/s 和 2.5µm/s 的位移速率。循环过程中的最大应变为 0.5%,这表示总位移为 37.5µm。这与在测量样品的狭窄区域(7.5mm)上的标距测量应变有关。注意,这里使用的是半长度模型。狭窄区域的全长为 15mm。
在压力容器的情况下,定义了峰值压力为 170bar,载荷率为 5.67bar/s 的载荷函数,如图 14 所示。
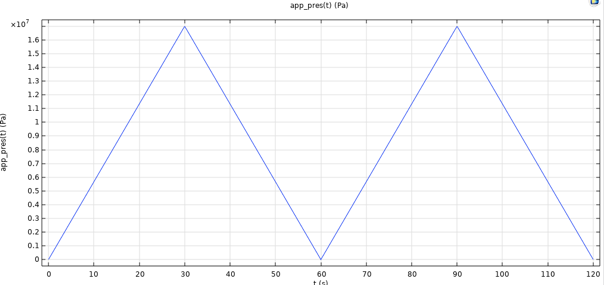
图14 载荷函数,压力容器案例。
材料参数函数
材料参数必须与温度有关,这可以通过在指定温度下用已知参数值创建插值函数轻松获得。例如,图15中被定义的 σsat。

图15 与温度有关的 σsat 的函数定义。
然后,使用创建的温度变量作为参数,通过调用此函数来正确计算与温度相关的材料参数。上述参数见图16所示,参照图9。固体传热 物理场接口的因变量T也可以作为参数。
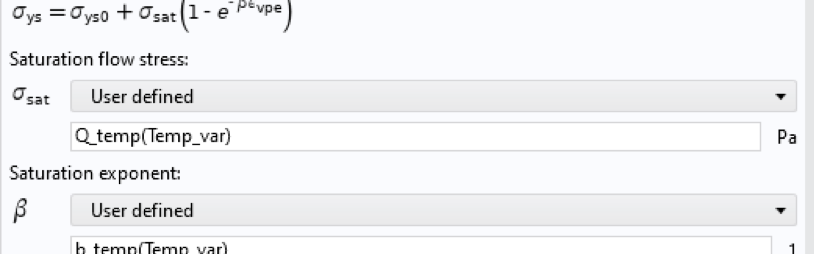
图16 在材料参数定义中调用温度变量。
极限抗拉强度和疲劳极限随温度变化的程序与上述程序相似,尽管室温下的参考值随后用无量纲折减系数进行换算(因为极限强度和疲劳强度都要换算)。图 17 显示了定义 Chaboche S-N 曲线的解析函数表达式(见图 1 和图 2),此处定义为室温(293K)下最大应力的函数。

图17 Chaboche S-N 曲线的解析函数。
比例函数 UTS_temp_scaling 的定义如图18所示。
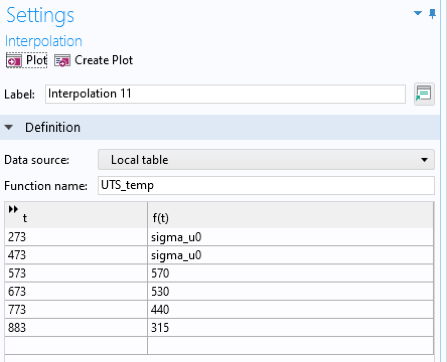
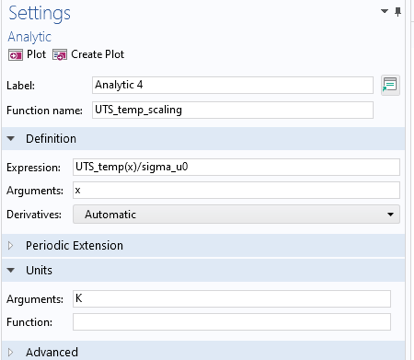
图18 极限拉伸强度的比例函数。
结果:实验比较
在模型的顶部创建了一个第一 Piola–Kirchhoff 应力平均值的边界探针,在此指定了位移。将其提取并绘制为所施加应变的函数,以获得循环应力-应变曲线。
等温测试
初始循环应力-应变曲线如图 19 所示。
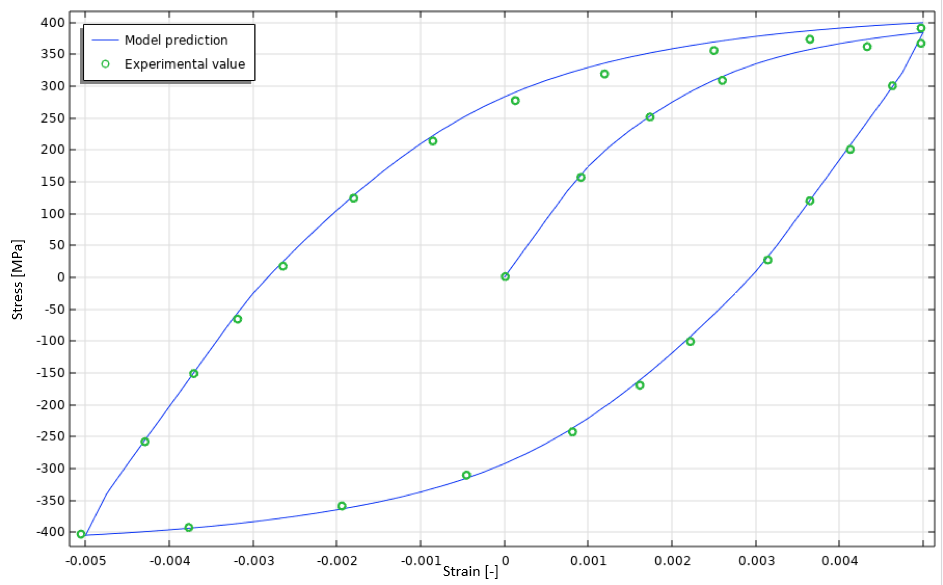
正如预期的那样,这个模型似乎可以很好地预测初始循环应力-应变曲线。
非等温测试
非等温循环应力-应变曲线如图20所示。
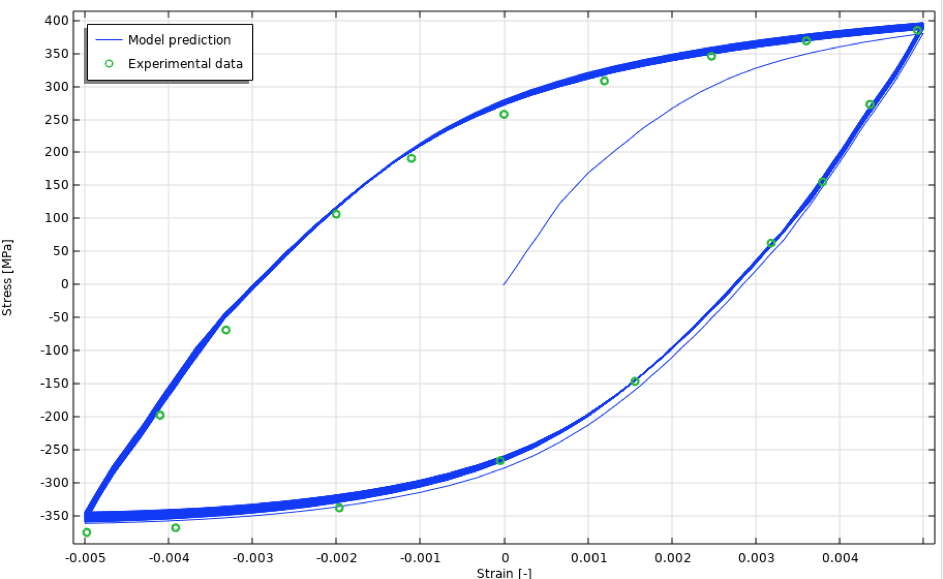
图20 循环应力-应变曲线,等温情况。
独立的第 50 个循环应力-应变曲线,如图 21 所示。
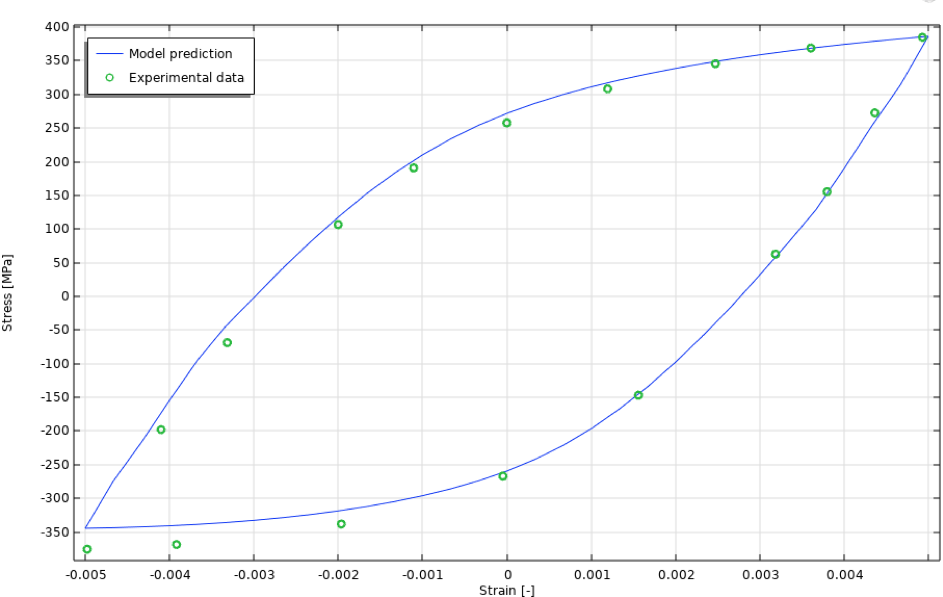
图21 第50次循环应力–应变曲线,等温情况。
结果:疲劳评估
应力和应变
第 50 次循环的最大载荷(2970s)和卸载后(3000s)von Mises 应力如图 22 所示。
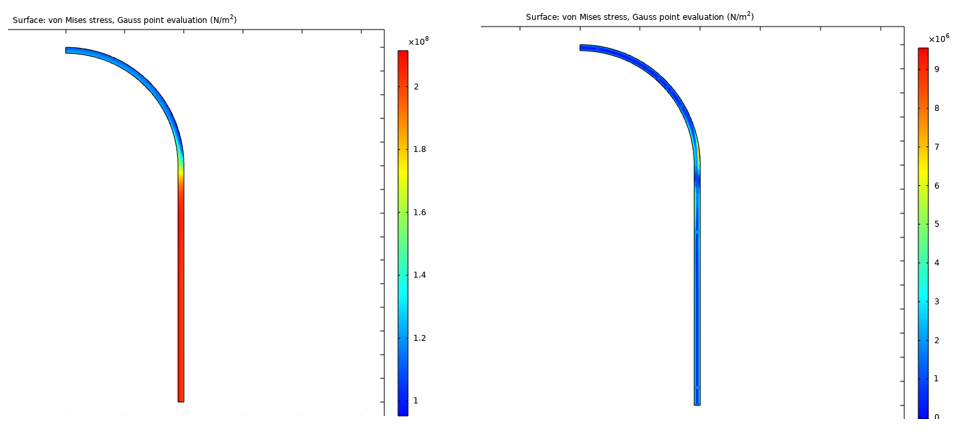
图22 第 50 次循环的最大载荷(2970s)和卸载后(3000s)von Mises 应力
50 次循环后的等效黏塑性和蠕变应变如图 23 所示。
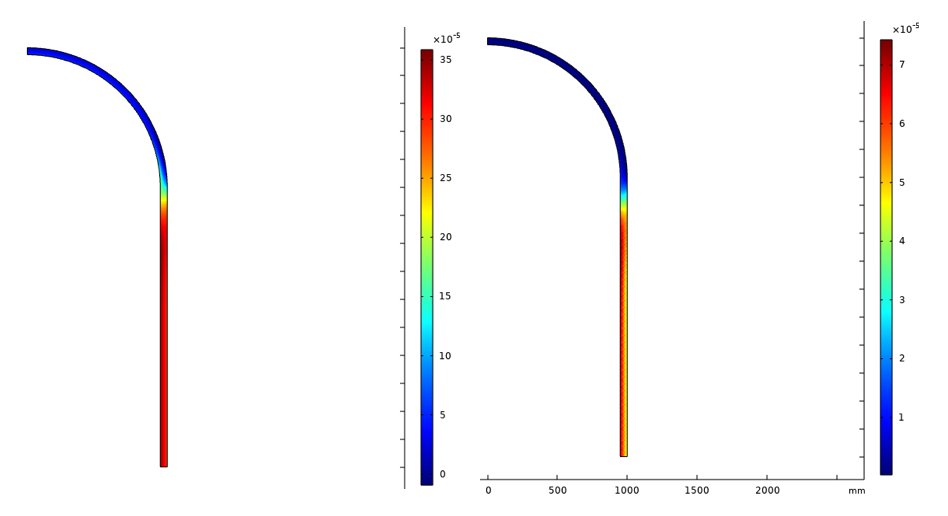
图23 50次循环后的等效黏塑性和蠕变应变。
不对称应力循环的一个典型行为是棘轮效应,其中每个循环的残余应变都会增加。非线性运动硬化模型解释了这一点。通常,随着时间的推移,具有高平均应力的加载循环增加棘轮应变,而较低的平均应力加载循环会稳定棘轮应变。为了估算疲劳循环的次数而不需要计算每个循环直到失效(见下一节),有必要获得一个稳定的应力-应变循环。绘制压力容器中最大等效偏应变的最大von Mises应力,图24显示了两种极端情况下的棘轮应变。
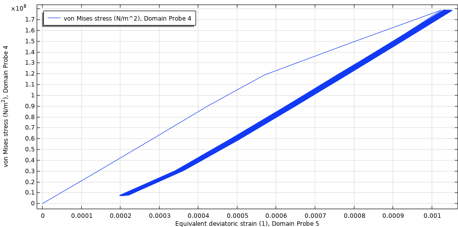
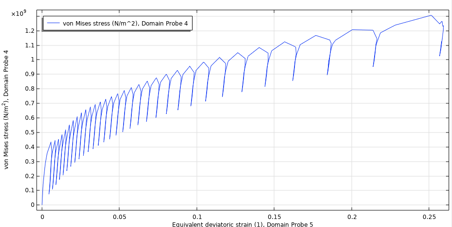
图24 低平均应力-最大压力 100bar (左)和高平均应力-最大压力 240bar(右)的棘轮应变。两种情况都是 R=0 加载。
对于低平均应力,循环周期几乎立即稳定;对于高平均应力,棘轮应变随循环次数的增加而增加。在这里考虑的负载情况下,最大压力为 170bar,前 50 个周期的棘轮效应如图 25 所示,摘自模型右下角。保守地说,也可以提取最大域值。
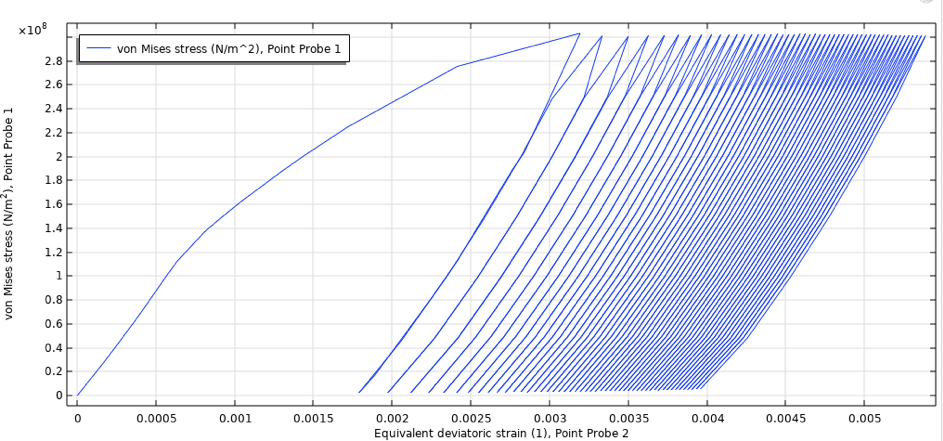
图25 压力容器的应力应变特性,最大压力为 170bar,在 500°C 至 600°C 之间异相循环。
每个循环的棘轮应变都有明显的下降,并且应力-应变曲线可以认为在 50 个循环后趋于稳定。
计算疲劳周期
有几种方法可以使用前面几节中定义的方程来估算部件的疲劳寿命。要计算每个周期的累积损伤,可以先通过找到满足下式的有效温度 T *
然后,可以根据下面的公式计算一个周期的损坏级数:
接着,通过对每个周期的损伤进行求和,得到总损伤。如果这些是有代表性的载荷循环,那么可以获得这种失效序列的次数(D= 1)。也可以简单地计算每个周期的损坏并求和,运行分析直到D= 1。这些方法可能很麻烦,因为它们需要一个框架来定义和评估为每个周期计算的变量。此外,分析一个部件直到失效通常需要几百到几千个计算周期,即使是低周疲劳也是如此。对于大型模型,这通常是不可行的。
然而,如果部件经受单一类型的载荷/温度循环,如本博文中的示例,那么失效的循环次数可以通过以下公式进行分析计算
然后只需计算稳定循环的平均和最大应力,并计算上述表达式。首先,疲劳风险点的应力-应变图应随时间可视化,以确保循环温度。根据图 25,应力-应变循环似乎是稳定的。
根据图 26:149.7MPa,通过最大应力点探针的时间平均算子的派生值来计算平均应力。
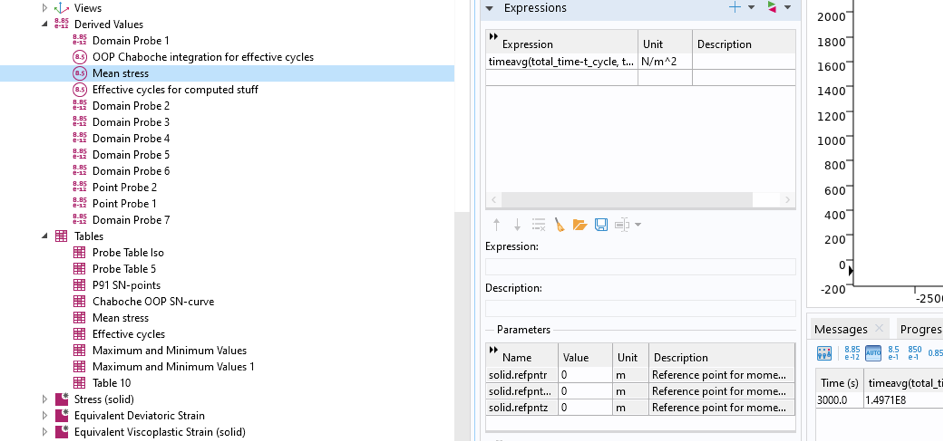
图26 稳定循环的平均应力的计算。
根据图27,循环数的解析表达式 被定义为时间、最大应力和平均应力的函数。该表达式与图17 中的通用表达式不同,因为它必须用于时间积分。

图27 根据时间、最大应力和平均应力计算的失效循环次数的定义。
如图28 所示,它可作为派升值,用于计算失效循环次数。最大应力可以从探针表中很容易获得:313MPa。
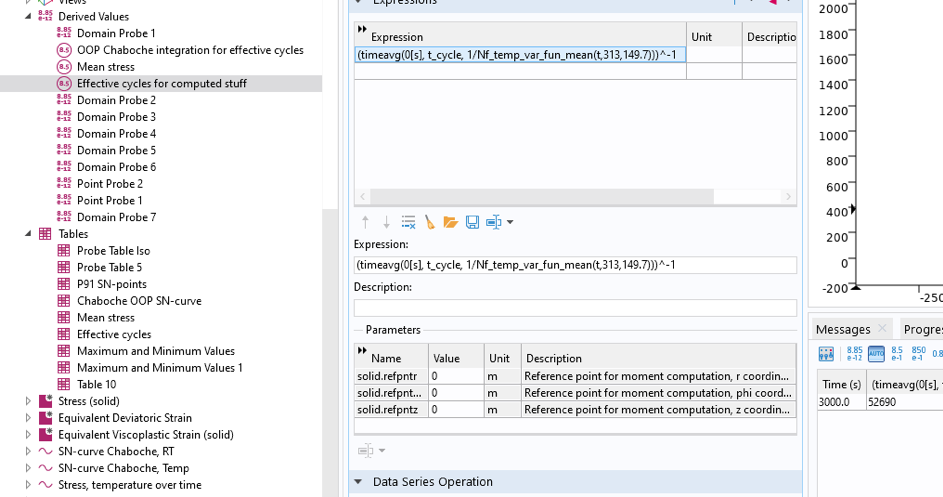
图28 使用 全局评估 节点计算失效的循环数。
计算得出的失效循环次数为 52,690。
结论与讨论
在许多应用中,热机械疲劳至关重要。在更高的温度下运行以减少排放的发电厂只是其中的一个例子。在高温和高载荷下,与温度相关的材料特性、蠕变和热应变都会影响热机械疲劳。
这些现象可以通过使用本文中描述的非线性材料模型在 COMSOL Multiphysics 软件中进行整合。尤其重要的是硬化参数,它控制着循环应力-应变曲线随时间的变化。使用定义温度函数并使材料性能与温度相关,从而可以使用众所周知的 Chaboche 疲劳模型来估计同时承受热载荷和机械载荷的部件的疲劳失效循环次数。如果载荷/温度循环在整个部件寿命期间是相同的,则使用解析表达式很容易做到这一点。
对于更复杂的加载历史,有必要为每个循环找到一个代表该循环中热载荷和机械载荷的有效温度。然后,将它用来适当地调整函数总使用的相关材料参数(在这篇博文中,是极限抗拉强度和疲劳寿命),并计算这个特定循环的损伤。这个增量的过程会积累损伤,当 D=1 时,假设发生疲劳失效。对于任何最高循环周期数超过几千个周期的情况,这都不是一个可行的方法,因为需要的时间太多了。如果可能的话,确定一系列有代表性的循环(负载块)将是更好的方法。
应该注意的一些方面。参考文献中的材料模型使用统一的 Chaboche 黏塑性模型,其中黏性应力被添加到解中,具体取决于 Chaboche 黏塑性硬化模型中使用的相同材料参数。COMSOL Multiphysics 中没有实现统一的黏塑性模型,而在这篇博文中使用了 Norton 蠕变定律。COMSOL Multiphysics 的计算结果与实验数据吻合良好。此外,考虑到 von Mises 应力与静水载荷无关,因此将 von Mises 应力作为疲劳应力使用在技术上可能不是一个好的选择。例如,Sines 准则可能更合适,因为载荷是成比例的,主应力方向可以假设为常数。然而,这篇博文在实现 Sines 标准几乎没有什么收获。
关于作者
Björn Fallqvist 是Lightness by Design 公司的顾问,负责基于数值分析的产品开发。他于 2016 年在皇家理工学院获得博士学位,致力于开发结构模型以捕获生物细胞的机械行为。他的主要专业兴趣和专业领域是材料表征以及使用各种材料模型捕获物理现象。
参考文献
- S. Natesan et al., Preliminary Materials Selection Issues for. s.l. : Argonne National Laboratory, 2006.
- C.J. Hyde et al., “Thermo-mechanical fatigue testing and simulation using a viscoplasticity model for a P91 steel”, Computational materials science, no. 56, 2012.
- J.L. Chaboche and P.M. Lesne, “A non-linear continuous fatigue damage model”, Fatigue fracture and Engineering Materials Structures, vol. 11, no. 1, pp. 1&ndash17, 1987.
- A.A. Saad et al., “Thermal-mechanical fatigue simulation of a P91 steel in a temperature range of 400-600C”, Materials at high temperatures, no. 28, 2011.
- COMSOL Multiphysics, Structural Mechanics Module User’s Guide.
- X. Feng et al., “Determination of creep properties of P91 by small punch testing”, Materials at high temperatures, vol. 32, no. 4, 2015.
- Y. Gorash and D. MacKenzie, Open Eng, vol. 7, 2017.
今天的文章作者来自于我们规模最大、历史最悠久的客户。这家客户非常著名,总部位于北极圈内,大多数时候人们可能会忘记他们的存在,但他们一直在留意着我们。他们一直拥有完美的客户满意度,但今年由于特殊原因,他们对圣诞季的产品配送任务有些顾虑……接下来,让我们一起了解 COMSOL 与这个来自北极圈的特殊客户的故事吧!
一个非常特殊的技术支持问题
随着年末的来临,我们的精灵团队正在礼物工厂中努力工作,为所有的小朋友和大朋友们准备各种玩具和礼物。您也许会认为我们是一个非常传统的组织,实际上我们的产品一直在使用最先进的技术,例如,我们的生物发光研究成果可以帮助圣诞老人照亮夜行的道路。
多年以来,我们一直使用 COMSOL Multiphysics® 软件进行产品研发。最近,我们使用 COMSOL Multiphysics 5.6 最新版本中的新功能解决了一个技术难题。
几天前,圣诞老人的太太克劳斯夫人很急切地找到我。她告诉我,由于疫情原因,圣诞老人今年一整年都待家里社交隔离,一不留神就吃了太多的饼干,胖了一大圈。克劳斯夫人担心今年圣诞老人可能会因为太胖而无法钻进所有的烟囱,造成一些礼品无法派送。她很友善地为我们提供了圣诞老人近期的照片,以及其他详细参数。
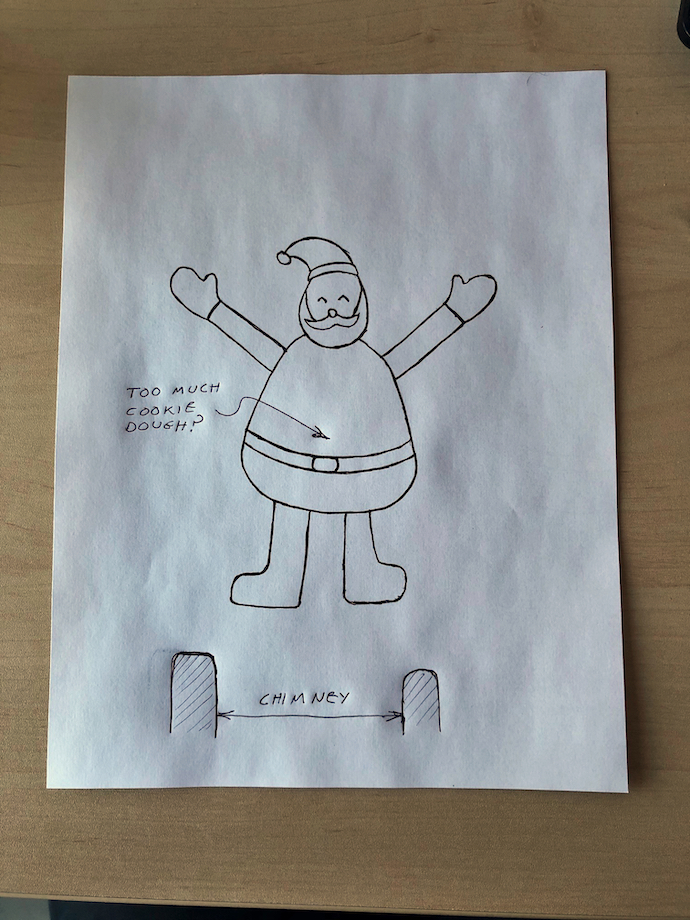
一个典型的问题描述。
我们意识到,这个问题可能会导致我们的礼品派送工作发生严重的中断,需要立即采取行动。说实话,这对我们来说并不是一项常规任务,所以我们联系了 COMSOL 技术支持部门,并询问他们如何最好地解决这个问题。一向乐于助人的 COMSOL 技术工程师立即向我们提供了一些有用的资源,并助我们一臂之力。
模拟圣诞老人
我们可以使用 COMSOL 5.6 版本中结构力学模块的新功能——动态接触功能来分析这个问题,另外还可以通过这篇文章(如何利用一个附加组件将图像转换为几何模型)介绍的方法直接将圣诞老人的照片导入 COMSOL 软件中。同时,我们还可以通过虚拟实验快速获取材料属性。只要做好了这些准备,我们就可以创建一个模型来模拟在派送礼物过程中,圣诞老人通过烟囱的场景。

我们正在检查网格,来来回回检查了好几遍。
下面,让我们来看看模拟结果…
太好了,圣诞老人可以通过!
圣诞快乐!
看到仿真的结果,克劳斯夫人非常高兴,并感谢所有精灵们的努力工作——无论是在北极为大家精心制作礼物的精灵,还是在 COMSOL 技术支持团队中为用户提供帮助的精灵。
最后,COMSOL 祝大家圣诞快乐,平安健康,并祝 2021 年万事如意!
关于作者
Winter Frost 是圣诞老人工作室的高级精灵工程师,专门负责拐杖糖的产品派送和形状优化。
今天的客座博主 James Dean来自 Plastometrex 公司和 Double Precision 咨询公司(COMSOL 的认证顾问之一)。他讲解了如何使用有限元(FEM)方法理解硬度值,并介绍了 Plastometrex 公司如何利用仿真 App 和 COMSOL Compiler 开发出一种可以从压痕测试数据中获得应力-应变曲线的全新产品……
开发出一种可以从压痕测试数据中获得应力-应变曲线的全新产品……
硬度测试方法已经应用数十年了,它们容易执行并且能快速得出结果。由于被测材料的体积很小,因此可以绘制不同表面的硬度值,研究局部变化以及获得薄表面层和涂层的数值。然而,硬度不是一个被明确定义的属性。对于一个给定试样,使用不同的测试方法获得的数值都不尽相同,并且在不同条件下使用同一种测试方法获得的数值也不相同。经常进行这类测试的人应该都清楚,具有不同屈服应力和加工硬化特性的材料也可以展现出相似的硬度值。这里,我们将借助 COMSOL Multiphysics® 多物理场软件对这种现象进行演示和说明。
硬度数的概念(通过压痕获得)
硬度是衡量材料抗塑性变形能力的指标。有意思的是,通过硬度不仅可以了解屈服应力,还可以了解之后的加工硬化特性。硬度数提供了一个兼顾这两方面的标准,尽管其定义并不明确。由于硬度代表的含义具有一定的复杂性,因此它不是一个简单的、定义明确的参数,并且使用不同的硬度测量方法测出的数值都不同。但是,所有这些方法的原理都相同,即将指定的载荷施加到硬度计的压头上。压头穿透试样从而引起塑性变形,并留下永久凹陷。硬度值可以通过多种方法获得,但在大多数情况下是通过测量侧面凹痕的横向尺寸(直径)或穿透深度来获取。
硬度通常定义为力(载荷)除以压头和试样之间的接触面积。该比值有应力维度,尽管通常被简单地引用为一个数字(单位为 kgf mm-2)。无论如何,该应力水平与材料的应力-应变曲线,甚至与试样中产生的应力场的关系都不简单。试样的不同区域将承受不同的塑性应变水平,范围从零(塑性区域的边)到百分之几十(接近压头)不等。即使最大应变水平也不能很好地定义,因为它取决于压头的形状、施加的载荷和塑性特性。尽管材料的应力-应变关系可以确定压痕尺寸(给定的压头形状和载荷),但从后者推断出前者并不简单,并且在常规的硬度测试中也从没有尝试过这样做。
布氏和维氏测试
布氏测试开发于 1900 年,是使用 3000kg(〜30 kN)的载荷将直径为 10mm 的硬球压入样品。布氏硬度值由下式计算
(1)
其中,F 是施加的载荷(以 kgf 为单位),D(mm)是压头的直径,而 d(mm)是压痕的直径(投影视图)。该公式是用载荷除以接触面积得到硬度值。这类公式基于简单的几何方法,试样的弹性恢复被忽略。此外,在实践中,凹痕周围可能会出现“堆积”或“下沉”现象,从而使真实的接触面积与理想几何形状获得的实际接触面积不同(也难以精确测量直径)。
维氏硬度测试是1924 年由Smith和Sandland(在 Vickers公司)开发的,其主要目标是降低早期试验的载荷要求。将压头从相对较大的球体改为较小的尖一点的形状,可以使用较低的由砝码产生的载荷。机器内部通常会提供多个砝码,根据型号的不同,其重量从 1 kg 以下到 50 kg 左右不等。(金刚石)压头是一个直角金字塔形,底部为正方形,其相对面之间的夹角为 136°。(锋利的)边推动穿透,并且其在凹痕中产生的线条可以帮助测量压痕大小。
压痕直径 d 通过投影测量(与布氏测试一样)。HV(载荷除以接触面积)由下式计算
(2)
因此,与布氏测试的简单计算类似,可以通过测量d来获得硬度值。与布氏测试一样,试样的弹性回复以及压痕周围的“堆积”或“下沉”现象也被忽略了。
维氏测试应用广泛。实际上,HV是最常用的硬度值,部分原因是它可以改变载荷。它可以应用于各种金属、薄截面、表面层等。图1显示了一组典型硬度数值(参考文献1),包括各种合金。这些数值是通过对特定样品的压痕尺寸进行仔细测量而获得的。这些数据可用于表示不同金属硬度的典型范围,尽管对确切的数值应该谨慎一些。
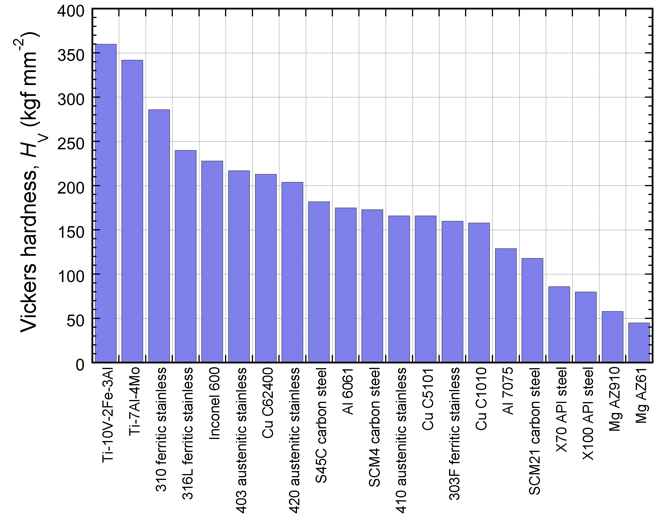
图1 一组合金的维氏硬度数(参考文献1)。
将硬度数乘以 g(9.81),可以得出作用在接触面积上的应力(单位 MPa)。该应力与应力-应变曲线没有简单的对应关系。但是,如果忽略加工硬化,那么硬度应与屈服应力成比例关系。对于维氏测试,该关系常用下式表述
(3)
这些表达式通常用于从硬度测量中获得屈服应力。
使用有限元法获得两种合金的硬度值
通过有限元模拟压痕过程,可以预测硬度值,该数值可以通过对特定合金(定义了应力-应变曲线)进行特定的测试来获得。这里我们使用两种金属 Ti-6Al-4V(318)和 Hadfield Manganese( 锰合金)钢来测试。这两种合金塑性变形的真实应力-应变曲线如图2所示。可以看出,二者有明显不同,318具有高屈服应力,但加工硬化有限;而锰合金最初较软,但表现出更好的加工硬化特性。
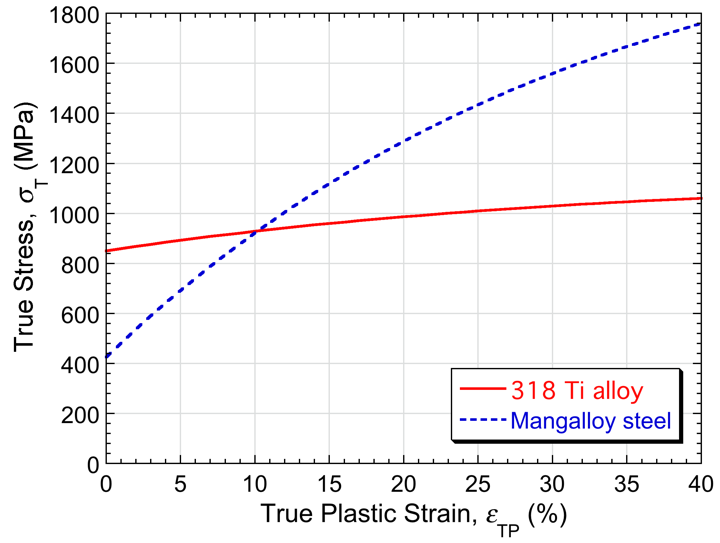
图2 318钛和 锰合金的应力-应变曲线。
图3 显示了使用 COMSOL Multiphysics 对318钛合金进行布氏和维氏压痕仿真的应力场预测结果。图4 和 图5 以残余压痕剖面的形式展示了对这两种合金进行的布氏和维氏测试模拟结果。为了将这些剖面图转换为硬度值,必须在光学显微镜中观察,并判断压痕的直径是多少。这些观察存在主观性,或者至少取决于成像条件,但是图中显示了预期值以及估计的误差范围。
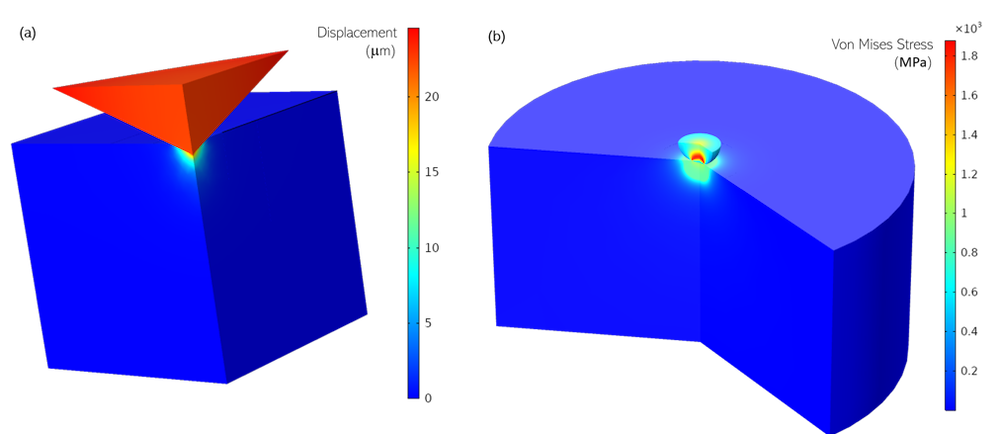
图3 使用维氏压头进行压痕试验仿真,在峰值施加载荷为 5kgf 时预测的位移场(左),使用布氏压头进行仿真预测的在峰值施加载荷为 3000kgf 时的 von Mises 应力场(右)。
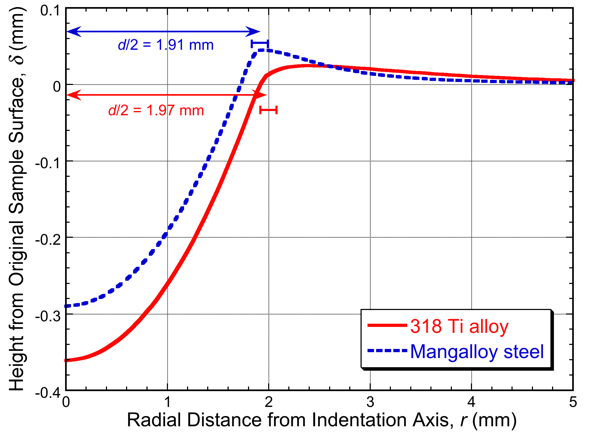
图4 对 318钛和锰合金进行布氏压痕测试后预测的残余压痕剖面。


图5 使用 4 种不同的载荷对 318钛(左)和锰合金(右)进行维氏压痕测试后,预测的残余压痕剖面(沿长径)。
通过仿真预测获得的布氏硬度和维氏硬度值如图6所示,所示的范围与图4 和 5 中所示的测量直径范围对应。有几点很清楚,尽管这两种合金的应力-应变曲线非常不同(图2),但由此获得的硬度值相似——当然是在测量方法预期的实验误差范围内。还可以看出,这些误差范围相对较大,尤其是对于较小(较低载荷)的维氏压痕而言。经常进行这类测量的人都熟悉这种变化。此外,尝试将这些硬度值转换为明确定义的参数,例如屈服应力(使用通过等式(3)这样的关系),也可能会有很大误差。对于这两种合金,获得的值大约都是 800 MPa,这对于钛合金来说是可以的(因为它的硬化很少),但对于锰合金来说却远远不够。尽管大多数获取和使用硬度值的人都了解应谨慎对待所获得的值,但实际情况并没有这么理想:无论如何,将其视为定量都可能会产生误导。
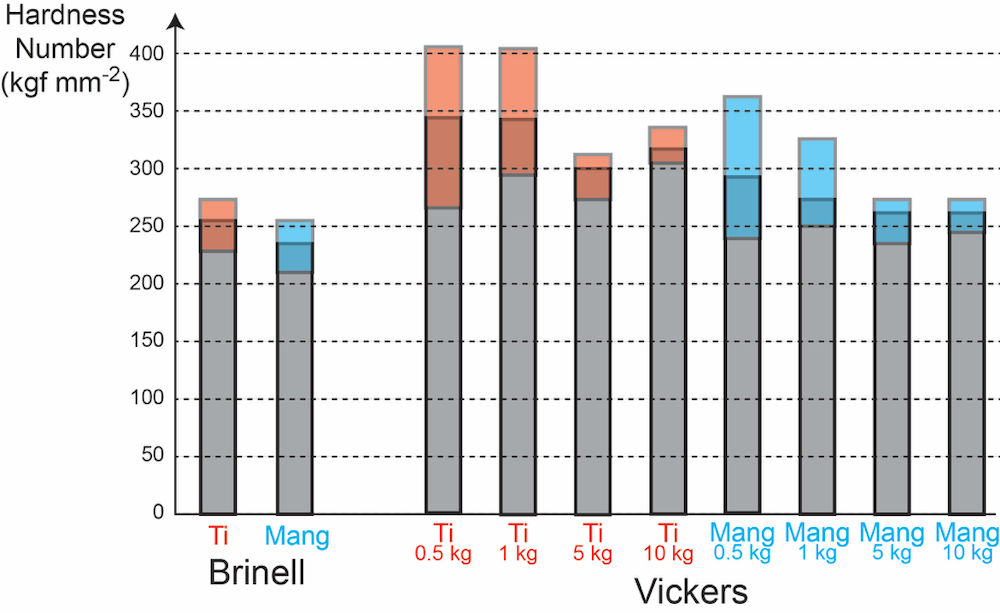
图6 从图3 和图4 所示的压痕直径数据得出的硬度值。
压痕塑性测定法
可能更有用的测试是,将硬度测试的最佳属性(速度、简便性和多功能性)与常规拉伸测试的最佳属性(即完整的应力-应变曲线的生成)相结合。压痕塑性测定法就是这样一种测试方法,它由 Plastometrex 的科研人员开发,包含三个非常简单的步骤:
- 材料中会产生球形凹痕(与布氏硬度测试中的情况非常相似)
- 使用集成的轮廓曲线仪测量残留轮廓形状
- 在使用 COMSOL Multiphysics 中的 App 开发器开发的定制 App 中分析残留轮廓数据
从概念上讲,基本方法非常简单,包括重复进行压痕有限元仿真(使用 COMSOL Multiphysics),收集实验数据(残余轮廓形状)和模型预测收敛(在本构塑性关系中对参数进行系统更改之后)。但是有几个复杂的因素,包括解“唯一性”和确定最佳测试条件的问题。同样,任何这样的软件包(要在商业上可行)都应该能非常迅速地提供解,因此收敛过程必须快速而稳健。实际上, Plastometrex 实施的方法确实可以确保在提供残余轮廓数据后的几秒钟内获得完整的应力-应变曲线。整个测试程序,包括创建凹痕和测量轮廓,只需要 3 分钟。
仿真 App SEMPID 和 COMSOL Multiphysics® 中的 App 开发器
App 开发器的主要吸引力在于,它允许用户创建独立的应用程序,这些应用程序可以访问 COMSOL Multiphysics 的全部功能,并且许可协议允许将这类工具商业化。我们的应用程序实现了压痕塑性测定的基础框架,被称为从压痕数据中提取材料特性的软件(Software for the Extraction of Materials Properties from Indentation Data,SEMPID)。App 开发器对于 SEMPID 的开发至关重要,这主要归功于其各种本地开发工具以及与 COMSOL Multiphysics 的紧密集成。SEMPID 应用程序能够利用 COMSOL Multiphysics 的许多核心功能,包括结构力学和非线性结构材料模块,配备的优化工具模块以及高级求解器设置功能,共同开发了一个定制的 App。这个仿真App也是形成一个新公司的基础,Element Materials 技术是该公司的主要投资者。
SEMPID 软件包的功能
SEMPID 应用程序计算了真实的和名义上的应力-应变曲线。它还有一个附加功能,允许用户实时模拟拉伸测试,并可以捕获应力-应变曲线的颈缩部分。SEMPID 应用程序可以直接比较通过压痕塑性测定法获得的应力-应变曲线和通过常规单轴拉伸试验(当然,这是此新方法有效性的最终检验)获得的应力-应变曲线。
图7 显示了 SEMPID 应用程序的几个屏幕截图以及压痕塑性仪的图像。图中展示了一组计算的应力-应变曲线,以及在 SEMPID 应用程序中运行的拉伸试验仿真结果。

图7 来自 Plastometrex 的压痕塑性仪和使用 COMSOL App 开发器开发的 SEMPID 软件工具的屏幕截图。
压痕塑性仪
定制开发的压痕塑性仪可以与 SEMPID 软件包捆绑在一起购买,它遵循内部开发的机密测试例程的程序化测试协议完全自动化必要的测试程序。压痕塑性仪可以处理各种大小和几何形状的试样,并且可以容纳平行的真实组件。它具有完全集成的电子器件,最大载荷容量为 7.5kN,集成了轮廓仪和定制编写的控制软件。它体积轻巧(<40 kg)且结构紧凑,可放置在典型的台式机上。图8所示为对铬镍铁合金 718 进行的测试验证示例,该方法适用于所有金属类型。

图8 左图是压痕塑性仪在铬镍铁合金 718 试样中产生的压痕。右图是 SEMPID 得出的应力-应变曲线与使用传统的机械测试实验测得的应力-应变曲线的比较。
观看这个视频,快速了解有关压痕塑性计的更多内容。
参考文献
- S.K. Kang, J.Y. Kim, C.P. Park, H.U. Kim, and D. Kwon, “Conventional Vickers and True Instrumented Indentation Hardness Determined by Instrumented Indentation Tests”, Journal of Materials Research, 25(2): pp. 337–343, 2010.
关于作者
James Dean 博士拥有伦敦帝国学院材料科学学士学位,和克兰菲尔德大学的热力(燃气轮机工程)硕士学位,并获得了劳斯莱斯UTC奖学金。他从剑桥大学材料科学系获得博士学位。从那以后,他在同一部门担任研究助理和高级研究助理职位,并于 2018 年加入卡文迪许实验室的科学计算中心,担任材料科学计算方法博士培训中心的高级教学助理和协调员。2012 年,他创立了Double Precision Consultancy(DPC),DPC 是一家总部位于英国剑桥的公司,专门为工业客户提供高级数学建模服务。DPC 现在是仅有的五个英国 COMSOL 认证顾问之一。2018 年末,他与其他人共同创立了 Plastometrex 公司,现在担任公司首席执行官。
今天的特邀博主是来自Lightness by Design 的Björn Fallqvis,他分两部分讨论了超弹性材料的分析方法,首先通过搭接剪切试验估计超弹性材料参数,随后建立了一个损伤模型来验证材料的软化行为。本文为第二部分内容,您可以点击此处阅读第一部分内容。
损伤模型的数学背景
为了建立超弹性材料的损伤模型,我们用一个损伤变量来修改应变能密度函数  ;也就是说,应变能密度现在被定义为
;也就是说,应变能密度现在被定义为  。根据定义,
。根据定义, 表示未损伤的状态;
表示未损伤的状态; 时,材料完全断裂。可以注意到,这与习惯上统一减去损伤变量的定义不同,但却是等效的。演化定律也可以写成这样的形式,尽管符号发生了变化。
时,材料完全断裂。可以注意到,这与习惯上统一减去损伤变量的定义不同,但却是等效的。演化定律也可以写成这样的形式,尽管符号发生了变化。
根据之前定义的演化定律(参考文献1),我们使用下列方程对损伤演化的速率形式进行模拟:
其中, 和
和  是材料参数。
是材料参数。
该方程的物理基础是阿累尼乌斯定律(Arrhenius’ law),该定律指出反应速率(在本文中是指化学交联的断裂)是一个指数,表述为:
其中, 是反应速率常数,
是反应速率常数, 是每个化学反应的指数前因子,
是每个化学反应的指数前因子, 是通用气体常数,
是通用气体常数, 为绝对温度,
为绝对温度, 为反应活化能(交联势阱的深度)。
为反应活化能(交联势阱的深度)。
如果要考虑由于施加变形而产生的额外能量,上式则可以改写为:
反应速率 是交联键断裂的速率,假设损伤率与它成正比。此外,我们推测,损伤率与材料的当前状态 成正比,材料状态指材料在某时刻能够断裂的交联键数目。以此我们推导出在本小节中定义的第一个演化定律,如图 1 所示(参考文献 2)。参数 b 可以看作是用于破坏交联键的应变能(单位浓度)的一部分。
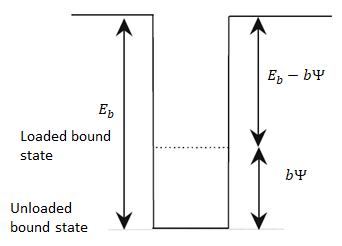
图1. 交联分子的结合状态。为了在加载状态下逃离势阱,断裂键所需的能量为  。图片来自参考文献 2。
。图片来自参考文献 2。
内部耗散  必须大于或等于零才能在热力学上有效,根据下列方程:
必须大于或等于零才能在热力学上有效,根据下列方程:
可知,此演化定律是有效的,但有以下限制: 。
。
在 COMSOL Multiphysics® 中模拟损伤模型
由于损伤演化定律是一阶微分方程,因此可以在 COMSOL Multiphysics® 软件中通过插入黏性域的常微分方程对象(如图 2 所示)轻松定义。将初始值 设置为 1 (无损伤)。参考温度设置为 20°C (293 K)。
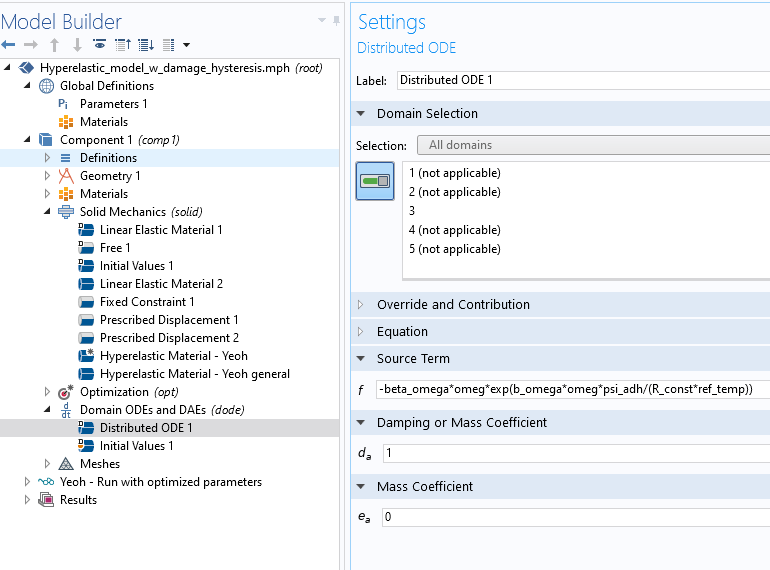
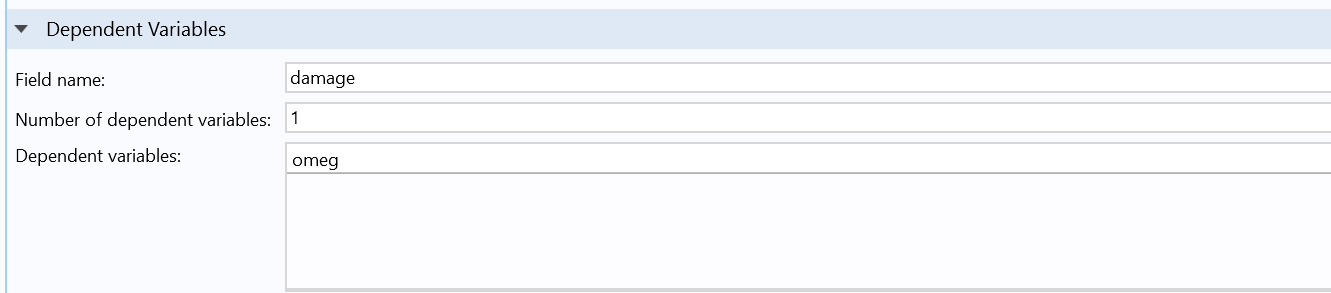
图2.损伤演化的域 ODE 定义。
如上一篇博文中所述,超弹性材料定义中使用了损伤变量“omeg”,并且  被定义为解变量,如图 3 所示。
被定义为解变量,如图 3 所示。

图3. ODE 定义中使用的应变能密度函数的定义。
根据之前的描述进行优化设置,不同的是现在最小二乘目标选择了更多的点进行优化。同时,添加了两个新的损伤模型参数作为控制变量,如图4所示。

图4.设置优化,包括损伤演变。
在初始分析中,我们选择使用 2、6、10 和 13.5 mm 处的点。在第二次分析中,我们使用了所有点,将来自初始分析中的优化值作为起点。呈现的参数值(和结果)取自第二次分析的所有数据点。
结果:优化有损伤的超弹性模型的材料参数
优化参数和力-位移曲线
损伤模型的初始和优化材料参数,见表 1。
| 缩放参数 | 初始值 [-] | 优化值 [-] | 损伤参数 | 初始值 | 优化值 |
|---|---|---|---|---|---|
 | 9.980 | 10.62 | | 3.27e-2 [1/s] | 4.24e-2 [1/s] |
 | 0.366 | 0.403 | | 4.81e-4 [m 3 /mol] | 4.12e-4 [m 3 /mol] = 0.41/M |
 | 0.260 | 0.203 | |||
| 最小二乘目标 [N2] | |||||
| 121570 |
该分析的力-位移曲线如图 5 所示。
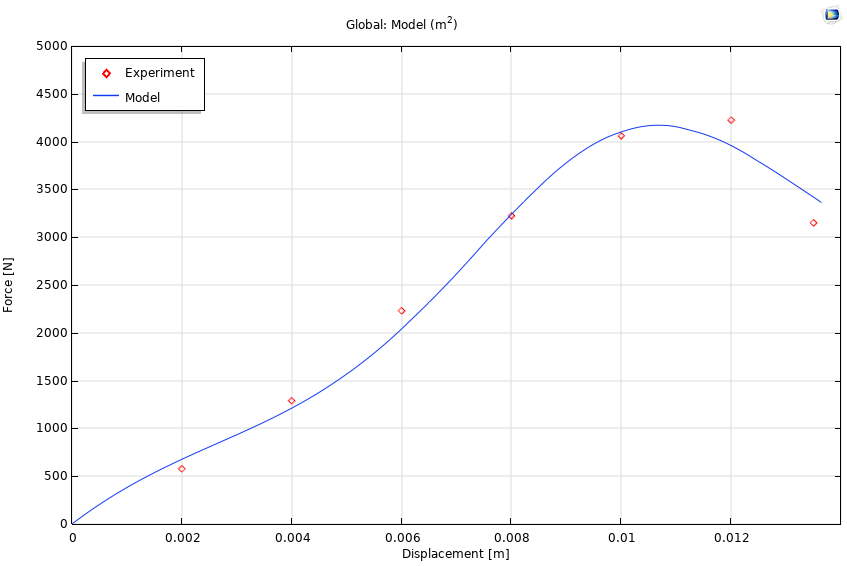
图5.有损伤的超弹性模型的力-位移曲线。
尽管实验数据和模型预测值之间存在一些差异,但在较大的应变下存在明显的软化,并且损伤演变描述了材料的软化行为。参数 是每个交联浓度的分数,并且对于每摩尔浓度  ,大约有 41% 的总应变能用于断裂交联键。
,大约有 41% 的总应变能用于断裂交联键。
应变率依赖性
根据演变速率形式,演化定律捕捉到了应变率效应。为了比较,前面的分析以 130 mm/min 的末端位移速率运行,如图 6 所示。
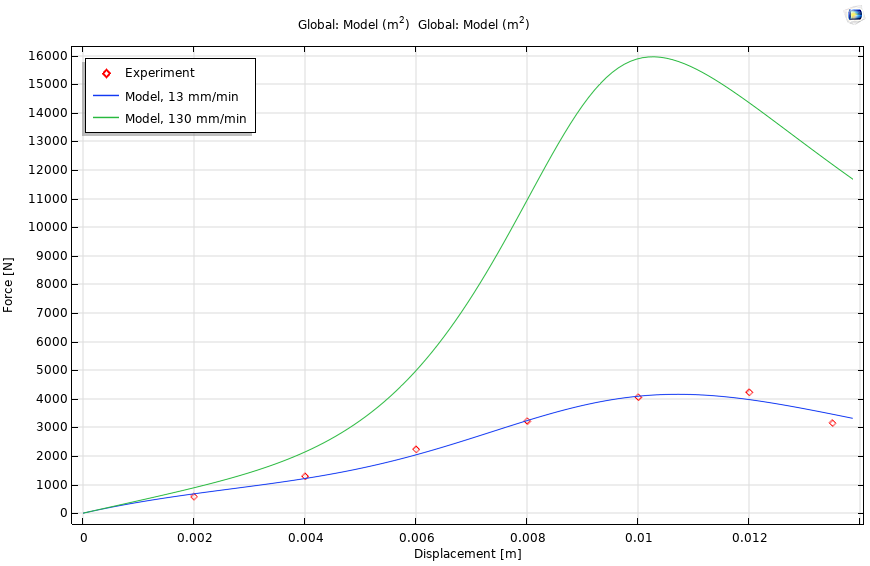
图6. 变形率的影响。
较高的变形率意味着损伤发生的时间和机率较少。这也适用于阿累尼乌斯定律,它给出了每单位时间内发生化学反应的概率,这里是指交联分离。
滞后和材料循环
下面,我们使用表 1 中定义的材料参数进行分析。
在软材料中观察到的一个常见现象是滞后。即由于材料中的能量耗散,加载和卸载路径不重合,表现为应力-应变曲线在每个周期中的变化,并且通常在一定程度的软化(或硬化)后趋于稳定。本文提出的损伤模型捕获了滞后现象,如果我们在分析中还包括卸载,则滞后很明显。见图 7。
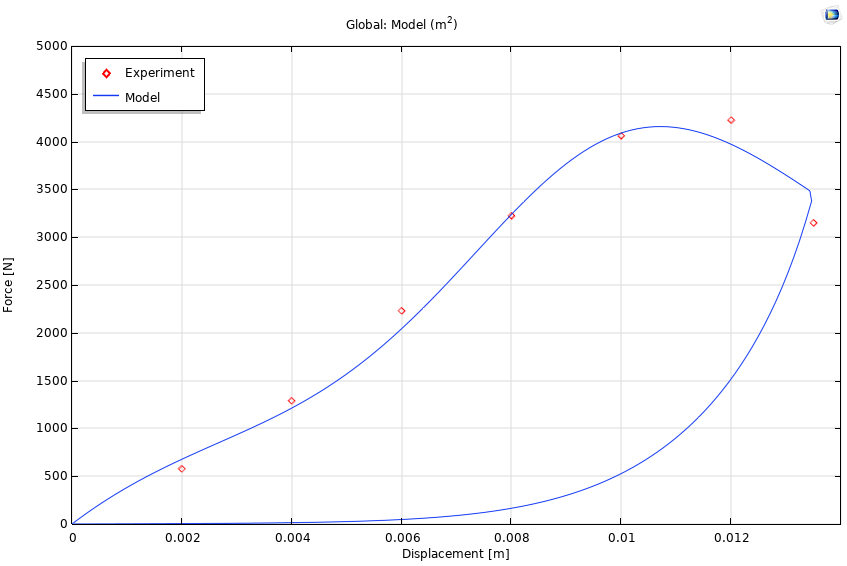
图7. 滞后曲线。卸载与加载以相同的速率发生。
为了进一步说明,我们将指定的 7.5 mm 末端位移指定为正弦波,频率为 0.25/s (即 4 秒为一个完整周期)。5 个初始周期的力-位移曲线如图 8 所示。
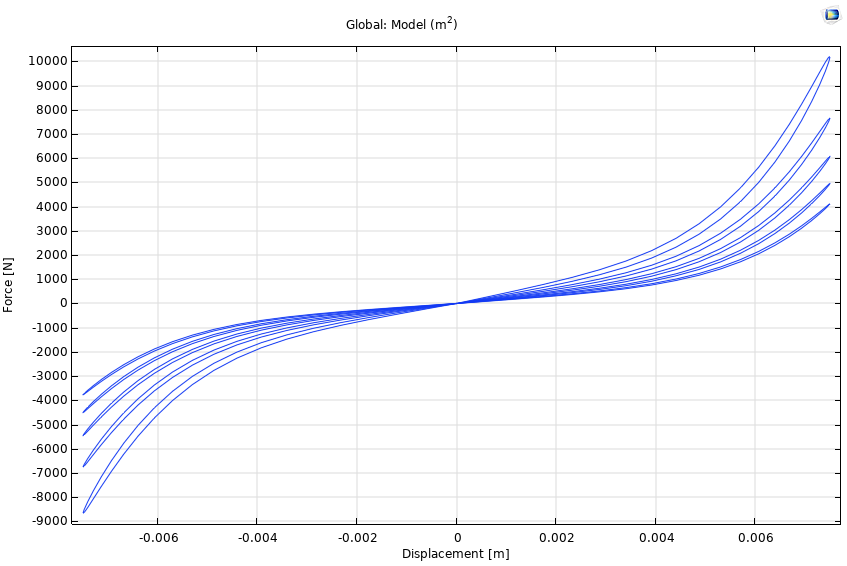
图8. 5 个初始周期的滞后曲线。
可以观察到明显的软化,并且加载-卸载路径不重合。根据损伤率曲线的定义方程(这里即指原始形式),最后滞后曲线没有稳定。如果我们施加一个相同频率的 6000 N 正弦力,也可以看到这一点。在图 9 中,末端位移不断增加。
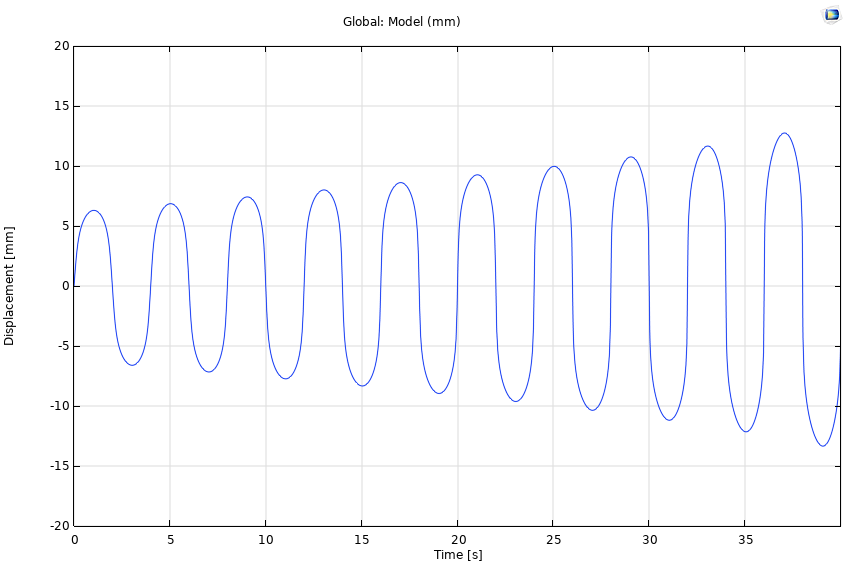
图9.等幅正弦力的位移。
在图 10 中,材料的位移出现在时间 1、13、25 和 37s。
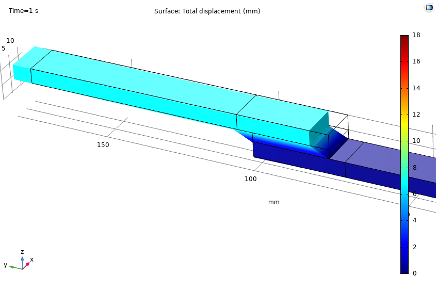
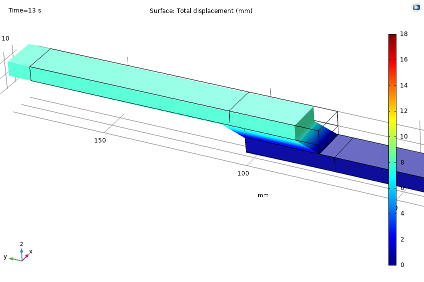
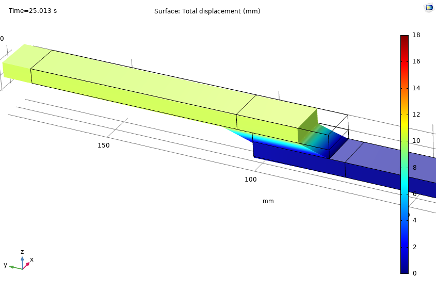
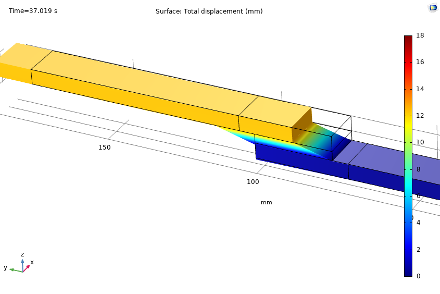
图10. 循环过程中 1、13、25 和 37s 的位移。
如果希望在循环后实现材料曲线的稳定,我们可以通过使用指数衰减函数修改损伤率方程来实现:
\begin{cases}
\-\beta \omega e^{(\frac{b \omega \psi}{RT})},\qquad \qquad \qquad \qquad \quad \omega > \omega_t\\ -\beta \omega e^{(\frac{b \omega \psi}{RT})}e^{({-\omega_{t,rate}|\omega-\omega_t|})}, \quad \omega \leq \omega_t
\end{cases}
其中, 是材料损伤状态的阈值,低于该阈值不应发生损伤。
是材料损伤状态的阈值,低于该阈值不应发生损伤。
系数  控制损伤率衰减到阈值以下的速度。这种形式是需要的,因为简单地在阈值以下将速率设置为零会导致不连续收敛问题。使用与图 8 相同的分析,但是
控制损伤率衰减到阈值以下的速度。这种形式是需要的,因为简单地在阈值以下将速率设置为零会导致不连续收敛问题。使用与图 8 相同的分析,但是  ,
, ,循环滞后曲线如图11所示。
,循环滞后曲线如图11所示。
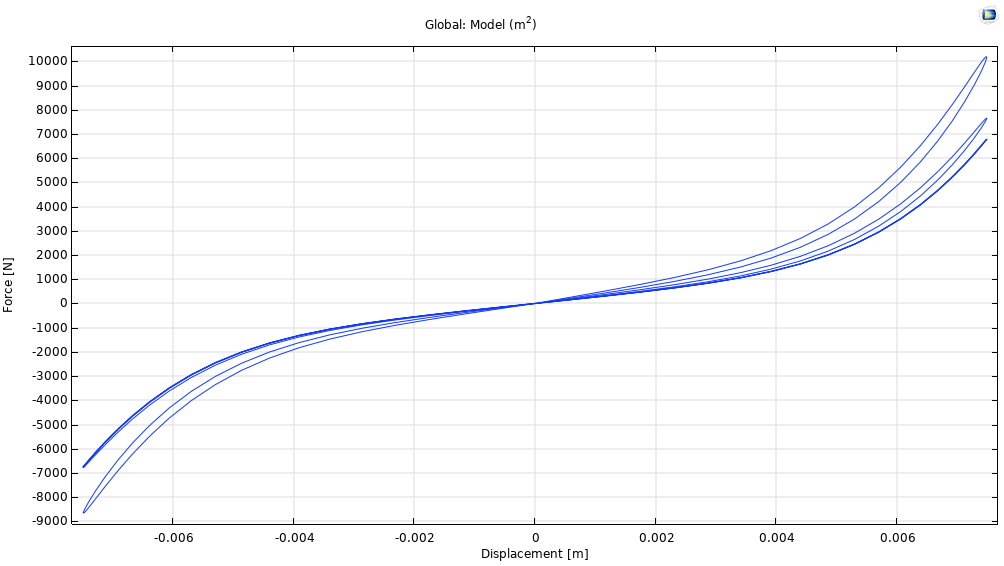
图11. 5 个初始循环的滞后曲线,其中 ,。
现在可以在第二个循环中看到材料响应明显稳定。
所述损伤演化定律具有三个参数( 只能设置为 1000),并包含以下效应:
只能设置为 1000),并包含以下效应:
- 滞后性
- 单调加载期间的材料软化/破裂
- 循环材料软化
- 应变率相关性
- 蠕变性
结论和最终想法
在今天的博客中,我们展示了如何结合使用 COMSOL Multiphysics 中的固体力学 和优化 接口,通过搭接剪切试验确定材料参数。通过直接对用户定义的应变能函数进行修改,任何基于速率的损伤定律都可以用类似的方式轻松实现。
我们还看到,用于优化的点数以及我们使用的点会影响结果。在初始值相同的情况下,对所有数据点进行优化会导致曲线拟合不佳。如前所述,每隔一个点优化的最终值被用作第二次分析中的初始值。记录力最高的数据点也包含在第二次分析中,用于略微改善拟合。对于均匀分布的点更容易优化,因此如果曲线的最小二乘拟合存在问题,可以尝试选择较少的大致均匀分布的点来获得良好的初始参数值。
由于操作简单,本文演示的损伤演化法非常具有吸引力。它建立了施加的变形(应变)率和应力,循环和单调软化以及蠕变效应之间的关系。
材料响应曲线的稳定性已被证明可以通过包括损伤演变的阈值来复制。这可以被认为是一个渗透阈值,并且交联网络已经被破坏到这样一种程度,以至于聚合物链之间没有足够的连接性来完全转移交联之间的机械载荷并破坏它们。其他变形模式控制宏观特性,例如长丝缠结和熵刚度。包含阈值主要被用在材料将被循环的应用中。对于单调加载,材料将在足够大的变形下断裂(例如本博客系列中的测试模型),两种机制之间的区别是模糊的,损伤定律可用于现象学意义。
另一个阈值定义可以是应变能密度,尽管这并不容易被用于微观结构的物理表示,并且选择阈值并不简单。
对于某些类别的材料,例如生物组织,我们还希望实现可逆的黏弹性行为。这可以通过用将超弹性参数中的等容第一不变量替换为弹性对应式,并为黏性变形指定演化定律(参考文献2)。最终,我们得到一种具有不同时间尺度的可逆和不可逆变形的材料参数。
由于演化速率表达式中存在温度变量,热效应可以包含在损伤模型中。但这主要是恒温下的蠕变应用中需要考虑的,因为材料参数也可以预期取决于此。
关于作者
Björn Fallqvist 是 Lightness by Design 公司的一名顾问,从事基于数值分析的产品开发工作。他于 2016 年获皇家理工学院博士学位,致力于开发用于捕捉生物细胞机械行为的本构模型。主要研究兴趣是材料表征领域,专长是和使用各种材料模型捕捉物理现象。
参考文献
- B. Fallqvist, M. Kroon, “Constitutive modelling of composite biopolymer networks”, Stockholm: Journal of Theoretical Biology, vol. 395, 2016.
- B. Fallqvist, M. Kroon, “A chemo-mechanical constitutive model for cross-linked actin networks and a theoretical assessment of their viscoelastic behaviour”, 2, Stockholm: Biomechanics and Modeling in Mechanobiology, vol. 12, 2013.
今天的特邀博主是来自Lightness by Design 公司的 Björn Fallqvist,他讨论了超弹性材料分析的不同方法,包括搭接剪切试验和损伤模型。
本系列博文分两部分,本文为第一部分,介绍了一个简单的搭接接头剪切测试,用于确定聚合物的材料参数。第二部分文章将提出一个基于物理学的材料损伤演化规律。
背景介绍
许多软材料,尤其是橡胶和生物组织,它们的应力和应变之间的关系不是线性的,即使在小载荷下也是如此。这些聚合物材料的微观结构导致了它们的非线性行为。例如,在生物聚合物网之类的材料中,聚合物链是缠结在一起的,并且经常交联。宏观材料产生的响应取决于几种不同的机制,其中一种是由热交换引起的细丝滑动、细丝拉直产生的熵刚度和交联刚度(以及粘黏)。
聚合物类材料这种复杂的行为,导致我们经常使用的理想化线弹性材料模型是无效的,因此必须采用不同的建模方法。通常,我们选择超弹性模型来进行建模,模型中的应变能量密度函数用于表征材料的状态和相关的应力。
COMSOL中有多种超弹性函数可供选择的,无论哪种函数,分析都涉及确定至少一个材料参数。这些参数需要通过实验确定,我们之前的一篇博客文章对此进行了详细描述(参考文献1)。然而,通常不同变形状态的数据要么无法获取,要么获取成本很高。
简单的搭接剪切试验可用于确定聚合物的材料参数,接下来我们将对这种方法进行介绍。
超弹性材料建模
假设存在一个应变能量密度函数,我们可以使用此函数对超弹性材料进行建模:
该函数是变形状态的函数,用变形梯度  表示。
表示。
通过将  与右 Cauchy-Green 张量
与右 Cauchy-Green 张量  进行微分,可以得到第二 Piola-Kirchhoff 应力
进行微分,可以得到第二 Piola-Kirchhoff 应力  ,然后将其转换为所需的应力状态。
,然后将其转换为所需的应力状态。
一般来说, 可以是控制各种机制的任意数量的内部变量的函数,例如,黏弹性行为和损伤。唯一的要求是这些变量必须满足热力学普遍性规律;即,耗散能必须大于或等于零。
通常, 是一个包含许多材料参数的表达式,具体取决于模型的复杂性。在这篇文章中,我们使用了 Yeoh(参考文献2)提出的模型,它包含三个项:
其中, ,
,  和
和  ,
, 是材料参数,是右 Cauchy-Green 张量的第一主不变量 (
是材料参数,是右 Cauchy-Green 张量的第一主不变量 ( )。
)。
许多超弹性材料表现出不可压缩的特性。在计算上, 被分成等容和体积部分:
的第一不变量 被其等容对应项取代。最后一项取决于体积模量  和雅可比
和雅可比  (即,右 Cauchy-Green 张量的第三主不变量)。为了模拟不可压缩性,为 分配一个足够高的值(通常约为剪切模量的 1000 倍)。
(即,右 Cauchy-Green 张量的第三主不变量)。为了模拟不可压缩性,为 分配一个足够高的值(通常约为剪切模量的 1000 倍)。
进行搭接剪切试验
使用放置在两个较硬的矩形条之间的样品进行搭接剪切试验。试验设置如图 1所示。
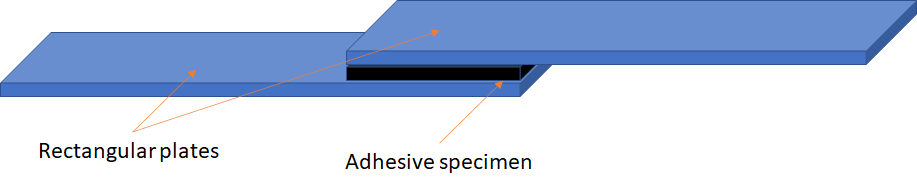
图1. 搭接剪切试验。
将两个板水平拉开直到试样破裂,记录力-位移曲线。在这篇博文中,我们分析了一个黏合剂样品。
黏合性能
本文中用作示例的实验数据由 Lindhe Xtend AB 提供,在此表示感谢。Lindhe Xtend 开发了具有独特的侧向灵活性的假肢 Xtend Foot。侧向灵活性在所有表面上都具有完美的平衡性和稳定性,能让用户在户外和不平坦的地面上移动时获得更大的信心。它减少了用户对跌倒的恐惧,增强了他们自由行走的愿望,并提高了假肢使用者的生活质量。
Xtend Foot 的相关测试数据如下:
- 黏合剂厚度:3mm
- 试样和板的宽度:25mm
- 板厚:5mm
- 黏合剂试样长度:5mm
- 测试温度:20°C
- 位移速率:13mm/min
图 2为所记录力-位移曲线。
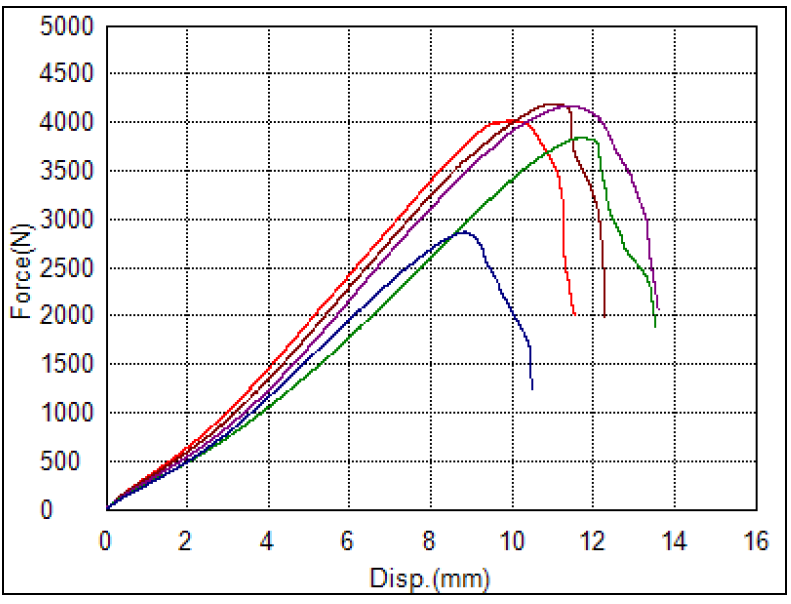
图 2. 黏合剂的力–位移曲线。
我们选择使用紫色曲线作为测试的基础。在更严格的分析中,我们可以确定一条平均曲线,但对于方法演示,一条曲线就足够了。该曲线表现出初始硬化和由于材料破裂而导致的软化。我们选择了一些点来优化,见表1。
| 位移 [mm] | 力 [N] |
|---|---|
| 2 | 577 |
| 4 | 1289 |
| 6 | 2230 |
| 8 | 3224 |
| 10 | 4060 |
| 12 | 4225 |
| 13.5 | 3150 |
表 1. 选定的数据点。
计算模型
几何模型
模型的几何结构是在 COMSOL Multiphysics® 软件中使用相关坐标的块几何工具构建的,见图 3。
图 3. 模型的几何结构。
对这些块进行分区以便于划分网格。由于几何和载荷沿试样和板的长度方向对称,因此只需建立一半模型。
网格
如图4所示,优化方案中的网格特意进行了粗化。
图4. 模型网格。
通过扫掠建立外部板域和黏合剂域,连接到黏合剂的板域是用自由四面体网进行网格划分。因为这里我们寻找材料参数的结果是反作用力,所以粗网格是可以接受的。研究黏合剂中的详细应力/应变状态需要进行进一步的细化。
材料模型
板比黏合剂硬得多,可以认为是刚性的。在这里,我们对其施加了钢的材料特性(杨氏模量 210GPa,泊松比 0.3,密度 7850kg/m3)。Yeoh 模型的超弹性参数 , 和 均设置为 0.1MPa。在材料模型公式中,使用了比例因子来执行简单的优化方案。在 COMSOL Multiphysics 中,材料参数和缩放因子 , 和 被定义为参数。
为了便于后续建立损伤模型,我们在超弹性材料定义中使用了用户定义的应变能函数,见图5。

图 5. 超弹性材料定义。
变量“omeg”用于修改应变能密度,稍后我们将对其进行解释。目前,。
边界条件
由于模拟了一半的试样和板,因此沿中心平面应用了对称条件,如图 6 所示。

图 6. 对称条件(平面外)。
指定试样的一端为固定约束,另一端指定为与时间相关的位移的函数,如图 7 所示。

图7. 板端面的边界条件。固定约束(左)和指定位移(右)。
研究类型和优化设置
由于损伤模型是基于速率形式的常微分方程建立的,因此使用瞬态研究进行求解。对于超弹性模型,稳态研究就足够了。
对现有的材料数据进行优化,需要我们定义在每个时间步长上所施加的与位移相对应的反作用力。因此,我们必须对指定的位移设置启用弱约束,并将其合并到表面上,如图 8 所示。第二个原因是我们只对几何的一半进行了建模。
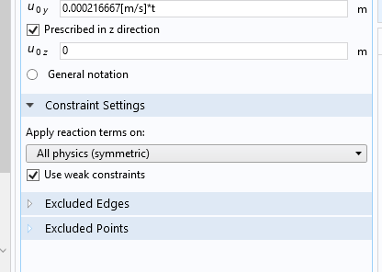
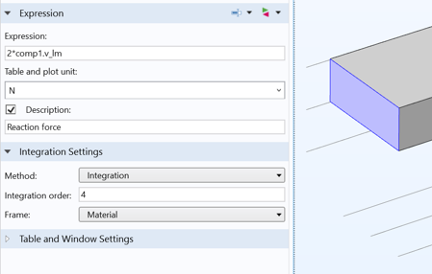
图 8. 优化反作用力的定义。
接下来,我们定义一个具有全局最小二乘目标的 优化 节点,见图 9。

图 9. 优化设置。
由于我们使用瞬态求解器进行求解,因此必须使用图 7 中定义的变形率将表 1 中的位移转换为第一列中的时间。对纯超弹性模型的第一次分析,我们仅使用前三个点,因为下一篇博客里对软化过程需要更复杂的分析。
最后,我们定义一个瞬态研究并插入一个优化 节点,见图 10。

图10. 研究步骤中优化 节点的定义。
我们对三个比例因子进行了优化,它们参与对超弹性材料模型定义中材料参数的缩放作用。唯一的限制是 必须是非负的,因为它会缩放剪切模量。为了在求解过程中跟踪缩放参数的值,可以方便地定义它们的全局变量探针。这样就会把它们储存在探测表中以进一步使用。
要定义一项使用优化参数分析的研究,只需要创建一个新研究并将求解的变量值设置为之前的解,如图 11 所示。

图11. 使用优化的参数值设置分析。
结果:网格的位移和影响
变形图与所选的材料参数无关,如下图 12 所示,用于直观的显示分析结束时的状态。
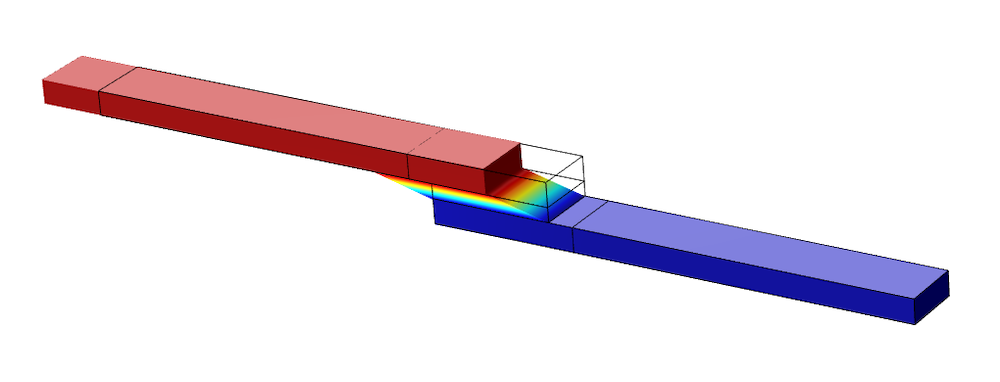
图 12. 分析结束时模型的变形。
如前所述,网格会影响应变状态。我们还对精细化模型进行了分析(没有损坏),如图 13 所示。
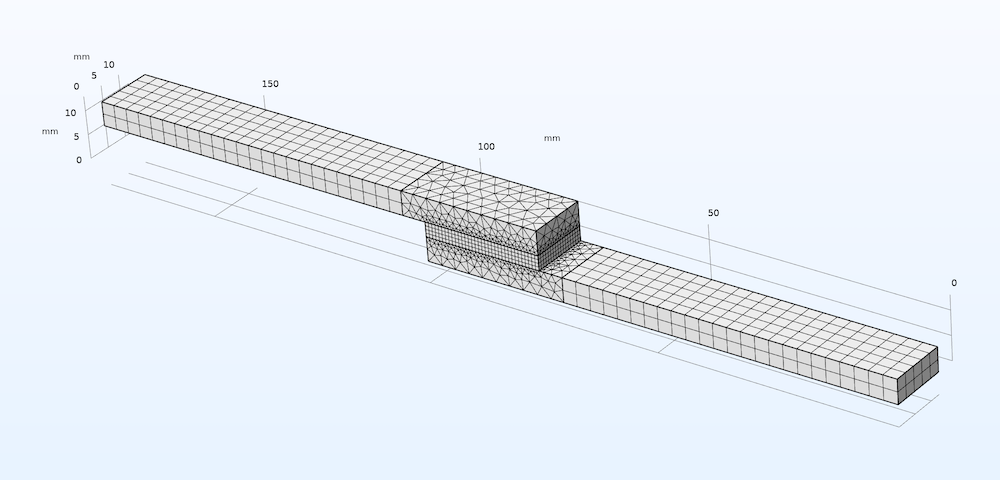
图13. 细化的模型网格。
图 14 显示了第四个数据点 (8 mm) 处的黏合剂域中的第一主应变。
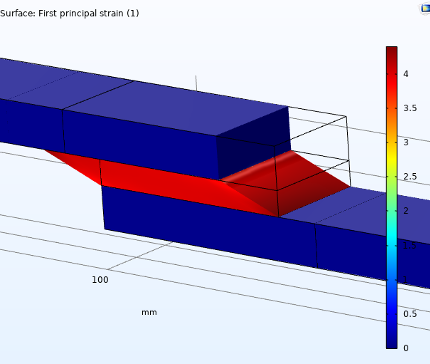
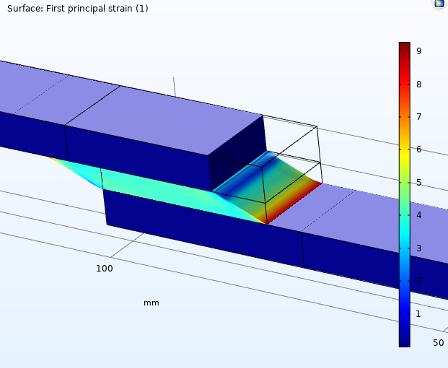
图14. 黏合剂域中的第一主应变,未精细化(左)和精细化后(右)。
可以看出,细化模型中的应变值要高得多,未细化模型中没有明显的梯度变化。分析过程中应变的最大值如图 15 所示,显示反作用力是为了表明网格细化不会影响它的值。
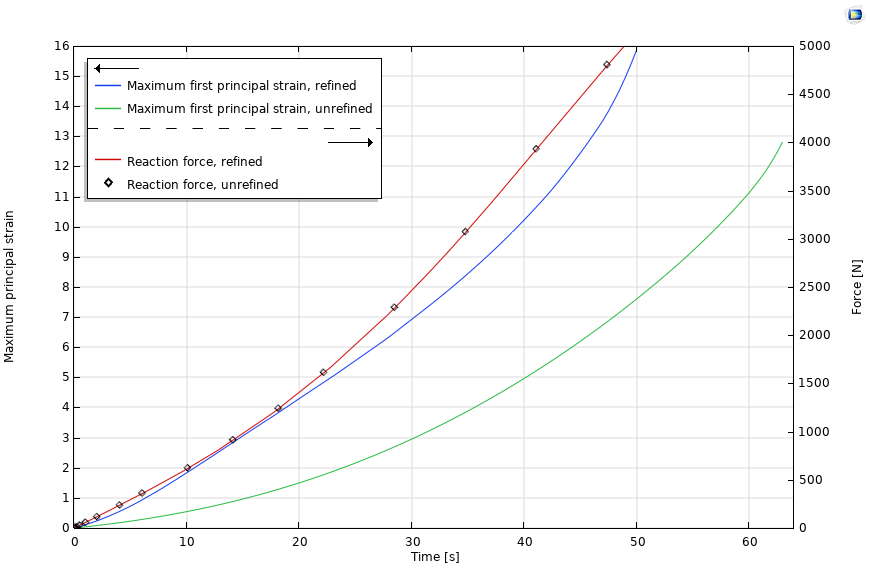
图 15. 黏合剂域中的最大主应变和反作用力。未细化和细化的网格结果。
结果:优化超弹性模型的材料参数
材料参数及其优化后参数的总结,如表2 所示。
| 缩放参数 | 初始值 [-] | 优化值 [-] |
|---|---|---|
| 7 | 6.56 |
| 0.09 | 0.34 |
| 0.03 | -0.0072 |
| 最小二乘目标 [N2] | ||
| 1.28e-14 |
表2. 初始和优化缩放和材料参数;无损伤。
产生的力-位移曲线如图 16 所示。
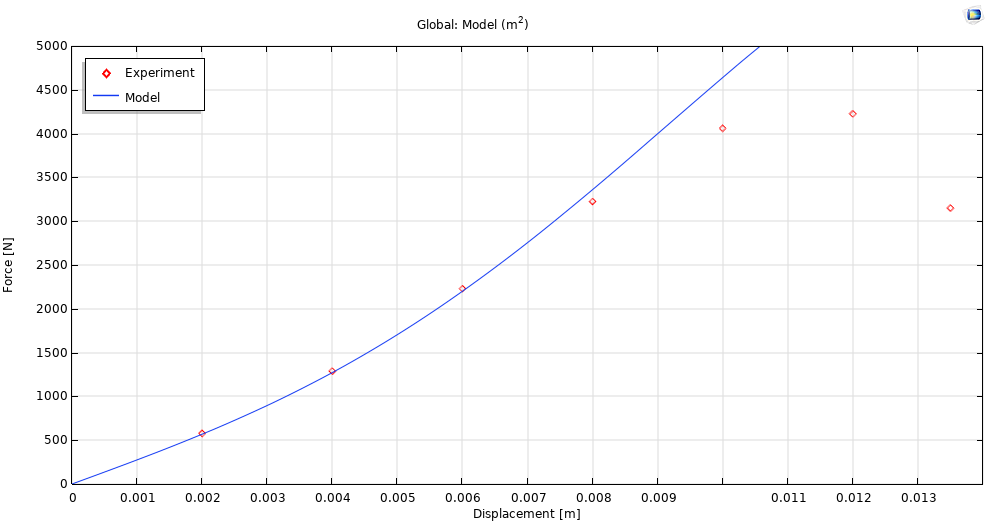
图 16. 超弹性模型的力–位移曲线。
可以看出,在材料软化之前,Yeoh 模型预测结果与试验数据具有极好的一致性。
敬请关注
接下来的博文中,我们将为材料提出基于物理学的损伤演化定律,该定律容易实施,并结合了材料软化(单调和循环加载)、蠕变和循环过程中滞后曲线的稳定。
敬请关注本系列博客的第 2 部分内容。
关于作者
Björn Fallqvist 是 Lightness by Design 公司的一名顾问,从事基于数值分析的产品开发工作。他于 2016 年获皇家理工学院博士学位,致力于开发本构模型以捕捉生物细胞的机械行为。他的主要专业兴趣是材料表征领域,专长是使用各种材料模型描述物理现象。
参考资料
- C. Kumar, “通过各种超弹性材料模型对测量数据进行拟合“, COMSOL Blog, 2015.
- O.H. Yeoh, “Some forms of the strain energy function for rubber”, Rubber Chemistry and Technology, 5, vol. 66, pp. 754–771, 1993.
COMSOL Multiphysics® 5.5 版本新增的金属加工模块用于研究热处理过程(例如,淬火和渗碳)。金属加工模块具有模拟钢和铸铁等材料中的相变和相关现象的特征和功能。它可以与结构力学和传热模块结合使用,计算热处理过程中组件的残余应力和变形。本篇博客文章,我们将介绍有关金属加工模块的基本功能。
什么是相变
当钢铁合金被加热到一定温度以上时,会转变为 γ 相铁,也称为奥氏体。在碳钢中,这种冶金相存在于约 730°C 以上且仍处于固态。冷却时,奥氏体分解成具有不同晶体结构的相,并具有不同的机械性能;混合物的确切相或相组成 取决于冷却速率和合金的化学组成。如果冷却速率足够高,就会形成非常坚硬的马氏体,而在较低的冷却速率下,可能会形成较软的相,如铁素体和珠光体。
在钢零件的制造过程中,通过加热和冷却的方式来控制获得想要的力学性能。例如,在汽车工业中,对轴、齿轮、曲轴和凸轮轴之类的组件进行热处理,以获得坚硬、耐磨的表面,同时保持内部的韧性。热处理的一种更古老的应用是铸剑。例如,日本武士刀的铸造就是一个对淬火过程要求很高的例子。该过程可以生产出锋利、坚硬,并具有弹性刀背的剑。在淬火过程中,除边缘以外的所有部分均隔热以限制内部的冷却速率,从而生产出坚硬的马氏体边缘和柔软的珠光体内部,这一过程称为差异化淬火。

17 世纪的日本武士刀,具有弯曲形状和单边刀锋(伯尔尼历史博物馆)。图片由 Rama 提供,获CC BY-SA 2.0 FR授权, 通过Wikimedia Commons公布。
{kind=link}
金属加工模块的功能和特征
金属加工模块包含两个新的物理场接口,即金属相变 和奥氏体分解 接口,可用于分析冶金相变。这两个接口都可以模拟扩散相变和位移相变。
金属加工模块与传热模块结合使用,具有模拟复杂传热的功能,能够计算有效的热材料性能以及相变潜热和热辐射效应。同样,通过将其与结构力学模块及其附加模块结合使用,可以计算残余应力、相变应变和变形。 金属加工模块接口还可以计算等效力学性能和诸如相变诱导塑性(TRIP)之类的现象,以及热应变。
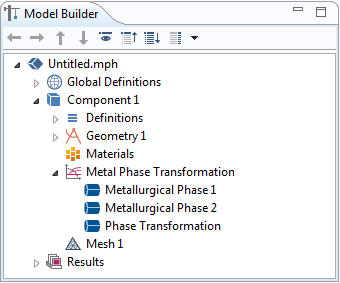
金属相变接口
金属相变 接口被用于研究发生在如钢材料的加热或冷却过程中的冶金相变。该接口具有两个功能:金相 和相变。
金相功能用于定义:
- 初始相分数
- 相的材料属性
相变 功能用于定义:
- 源相
- 目标相
- 输入数据和设置,这些数据和设置定义了如何消耗源相而形成目标相
相变 功能提供了三种类型的相变模型:
- Leblond–Devaux 模型
- Johnson-Mehl-Avrami-Kolmogorov(JMAK)模型
- Koistinen–Marburger 模型
前两个模型适用于扩散控制相变,例如当奥氏体分解成铁素体时。最后一个模型适合于模拟位移(无扩散)马氏体相变。除了这些模型之外,我们还可以自定义相变模型。COMSOL Multiphysics® 的用户界面直观,我们可以定义模型中的相和相变。下图为 相变 功能的示例设置。该示例基于扩散的 Leblond-Devaux 模型来描述 冶金相 1 如何转变为冶金相 2。图示中输入数据包括与温度有关的函数 func1 和 func2。

使用 Leblond-Devaux 模型的相变设置,将冶金相1 和冶金相2 作为源相和目标相。
当添加了金属相 接口后,将自动生成两个金相 节点和一个相变 节点。这是建立这种模型的最低要求。我们可以在模型中定义任意数量的其他相和相变。
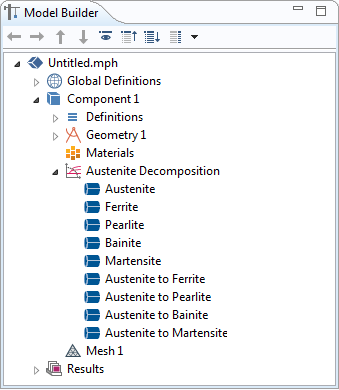
奥氏体分解接口
奥氏体分解 接口是以金属相 接口为基础,专用于模拟钢淬火。添加此接口后,将自动生成代表奥氏体分解过程中最常见的相变金相 和相变 模型开发器树节点。
多物理场功能
在许多实际情况下,相变会引起残余应力和变形。例如,淬火过程中的钢部件表面冷却速度最快,而内部的冷却速度较慢。这种不均匀的冷却很关键,因为它会引起应力和相变应变的不均匀分布。
金属加工模块包括两个多物理场耦合节点,可以方便地耦合到固体传热 和固体力学 接口。相变潜热 多物理场耦合节点用于计算相变过程中的热量释放或吸收。相变应变 多物理场耦合节点用于计算 TRIP、相塑性和热应变。
我们还可以将金属相变 和奥氏体分解 接口同时使用进行多物理场耦合。此外,金属相变接口可以计算等效力学属性,并且可以很容易地与固体传热、固体力学以及模型中的其他接口耦合使用。
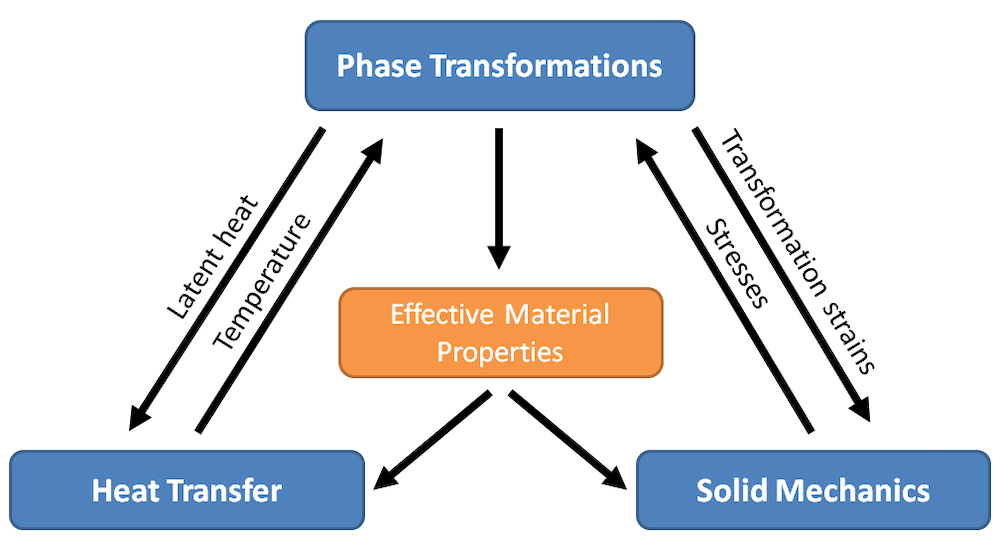
与传热和固体力学接口耦合计算相变。
钢淬火示例
利用上面介绍的功能,我们可以模拟变速箱组件的钢淬火。例如,模拟钢齿轮的渗碳和淬火过程。
在渗碳过程中,碳扩散进入齿轮表面,会影响马氏体相变的开始点。下面的示例模拟了零件在油中的淬火,并计算了最终的相组成、残余应力和变形。模拟结果表明,齿轮的根部出现了较高的残余压应力。尝试自己模拟该示例模型,请参见COMSOL 案例库中的钢齿轮的渗碳淬火案例教程。


钢齿轮的渗碳和淬火:计算碳含量(左)和残余应力(右)。
其他应用
金属加工模块包含的功能不限于铁合金,例如钢和铸铁。我们可以使用金属相变接口模拟在增材制造中常使用的钛基  双相合金 Ti-6Al-4V 的相变。该模块可以实现任意数目的相以及扩散和/或位移相变适合于模拟材料中
双相合金 Ti-6Al-4V 的相变。该模块可以实现任意数目的相以及扩散和/或位移相变适合于模拟材料中  和 相的溶解和形成。
和 相的溶解和形成。
金属加工模块的另一个应用是详细分析焊接中的热影响区(HAZ)。众所周知,熔池附近的基础材料会受到焊接过程中热量的影响,并且相变会在焊缝中引起变形和残余应力。
下一步
单击以下按钮,了解金属加工模块中有关模拟冶金相变的专用功能的更多信息:
短语“上了油的机器”通常用来描述平稳的机械运转,这是因为在系统内的接触零件之间添加润滑(例如润滑油)可以帮助其轻松的运转并减少磨损。然而,添加润滑剂会改变机械行为,这给工程师带来了全新的挑战。SIMTEC 的专家使用数值仿真设计了一种含润滑剂的机械接触,用于快速预测系统内轴承的行为。他们还构建了一个应用程序,用于优化设计中润滑剂的使用。
使用润滑剂以最大限度地减少轴承摩擦
对处于相对运动中的相互作用面进行的研究被称为摩擦学。这一研究领域是许多系统研究的基础,包括力学、机电学以及生物学。摩擦学领域的学者研究摩擦学中涉及的多种物理现象,例如相互作用面的磨损、热传递和润滑。
该领域的实验可以追溯到列奥纳多·达·芬奇(Leonardo da Vinci),他被认为(基于他为数众多的其他艺术和科学贡献)是奠定两条摩擦定律的“摩擦学之父”。
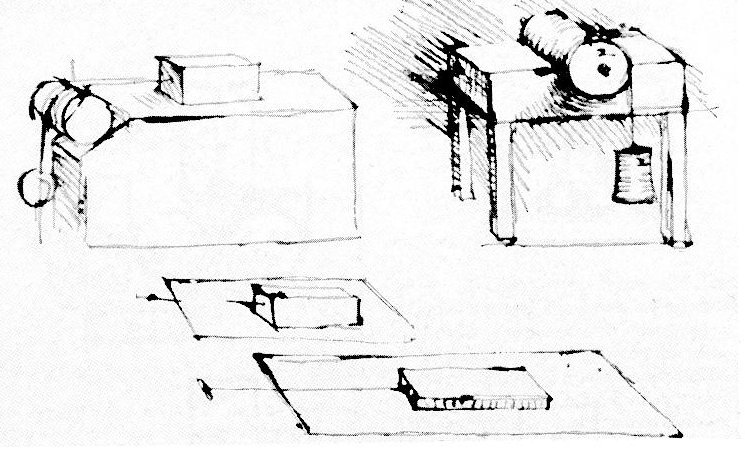
达芬奇绘制的摩擦学实验草图。该作品在美国属于公有领域,在其原籍国及其他版权期限为作者逝世后不超过 70 年的国家和地区也属于公有领域。通过Wikimedia Commons获取。
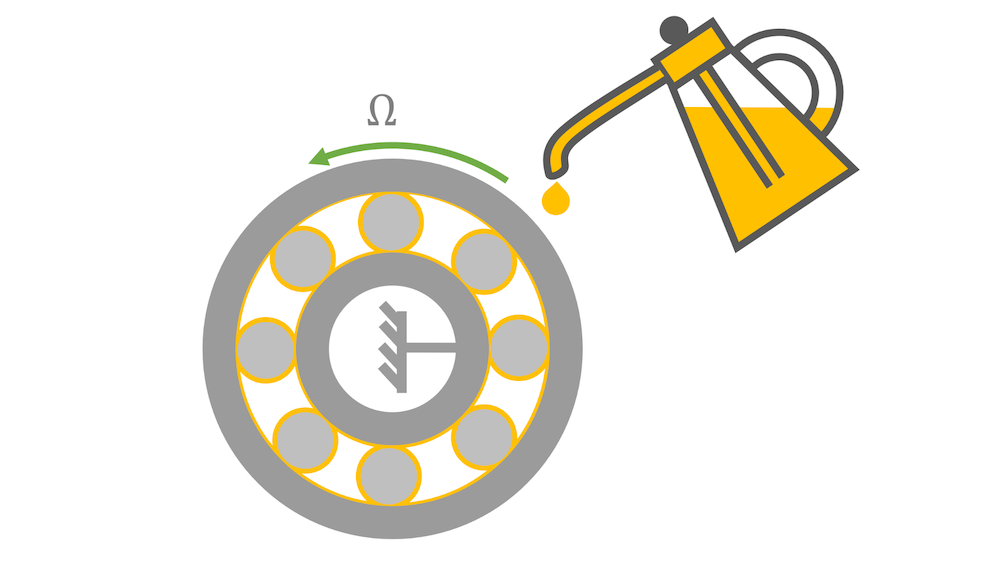
轴承是摩擦学中的一个经典的机械部件示例,它可以将两个运动部件之间的摩擦降到最低。滑动轴承和滚动轴承都充当材料之间的屏障。滑动轴承有利于滑动运动,滚动轴承有利于滚动运动。COMSOL 认证顾问 SIMTEC 的仿真专家 Jean-David Wheeler 和 Vincent Bruyère 解释说:“提到滑动轴承和滚动轴承,其作用是在两个运动体之间以最小的摩擦和最小的磨损实现速度的调节。”
轴承及其运动涉及许多复杂的多物理场现象。例如,在滚动轴承的应用中,如果在保持架和滚动元件之间出现滑动接触,那么可能会出现问题,因为它们会产生能量损失。这种设定存在的其他问题是:负载不是纯径向的,以及滚子和法兰接触的几何形状可能会有所不同。正如 Wheeler 和 Bruyère 所指出的:“如果轴承的设计不适合其应用,它可能会受到严重损坏甚至毁坏,从而导致整个机构失效。”
对于这类问题,必须添加润滑。润滑材料通常放置在轴承中,并且会在两个接触表面之间扩散,以薄膜的形式存在,从而避免了材料之间的直接接触。然而,虽然 Wheeler 和 Bruyère 说在接触中添加油和油脂通常很关键,但“很难获得准确的摩擦和磨损预测。”为什么润滑剂的行为这么难以预测,以及如何在设计中加以考虑?

自行车轴承过早失效的示例,部分原因是润滑问题。图片来自 Ben pcc 的私人作品通过 Wikimedia Commons 进入公共领域。
考虑不可预测的润滑剂行为
气候和天气等环境因素会导致润滑油行为不可预测,同样的因素也会影响系统内的热力学系数和能量损耗。添加润滑剂的过程也可能会导致问题:例如,如果润滑油的加入量过少,油膜厚度就会降低,从而导致过早磨损。这种表面破损会导致轴承卡塞。此外,有某些接触,例如对于滚子轴承和法兰滚子端的临界接触,给油操作可能会更加困难,并会产生较高的能量损失。此外,触点的准确位置经常会移动到侧面而不是在中间,这会导致触点截断。这种能量损失会转化为热量,进而改变润滑剂性能,并降低油膜厚度。
一般来说,润滑剂及其运动最终会导致弹性流体动力润滑现象,其与流体流动、固体力学以及由于流体压缩和剪切产热而引起的热效应有关。弹性流体动力润滑现象也是多尺度的,即固体在厘米或分米尺度,接触表面在毫米尺度,薄膜厚度在微米或纳米尺度。当速度场或者接触体的形状比较特殊时(例如前文提及的法兰滚子端接触),上述问题可能会变得更加复杂。受压情况下,润滑剂会从触点流出。同等压力下也会增加润滑油的黏度并降低较高压力下的流量。压力黏性流体在表面之间被拖动,弹性流体动力润滑现象最终会导致润滑油膜与表面分离。
这就是为什么在前期设计过程中预测润滑剂行为很重要的原因。据 SIMTEC 团队称,对接触行为进行建模有助于构建可靠的系统。“通过再现轴承的工作条件,仿真还可以帮助我们更好地了解故障模式。”Wheeler 和 Bruyère 说道。这有助于他们深入了解机制,通常情况下也使得他们能够更好地识别问题。
为了应对这些不可预测的行为,SIMTEC 使用 COMSOL Multiphysics® 多物理场仿真软件创建了一个数值模型和一个仿真应用程序。
将润滑剂加进滚动轴承(左)和滑动轴承中(右)。图片由 SIMTEC 提供。
使用 COMSOL Multiphysics® 对带有润滑垫的滑动轴承进行建模
由于接触之间所涉及的复杂多物理场行为,将计算摩擦学与实验相结合最适合研究润滑接触的行为。工程师必须能够从一开始就预测薄膜的摩擦力和厚度。为了节省时间和资金,SIMTEC 创建了带有润滑机械接触垫的滑动轴承有限元模型。这些组件常见于工业机械中。
“COMSOL Multiphysics 确实是我们在 SIMTEC 中的理想工具, ”该团队成员说,“作为 COMSOL 认证顾问,我们的主要任务是为行业引入该数值模型产生的实验研究成果。因此,我们对有限元软件寄予厚望。实际上,它必须足够灵活以实现非标准的研究功能,但同时还必须易于使用、高效,以满足工程需求。”
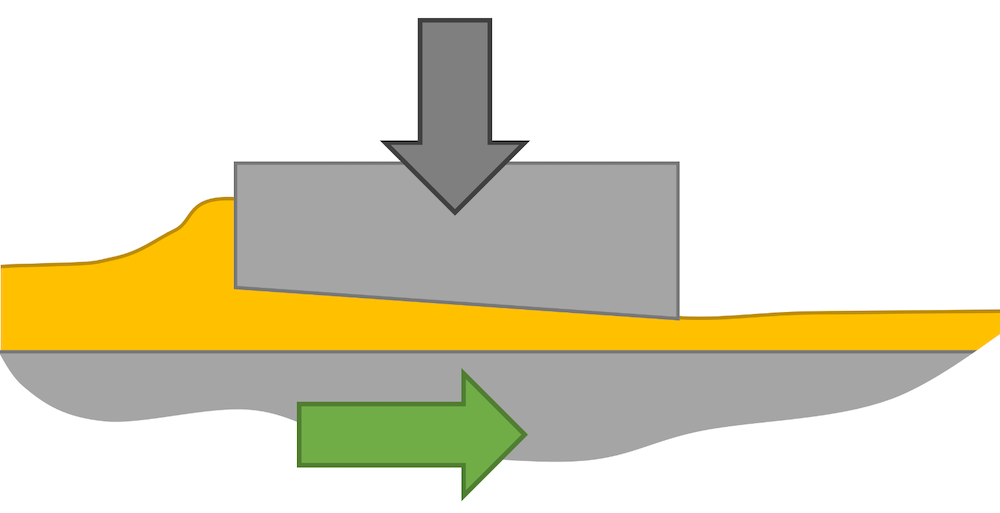
为了建立需要仿真知识和摩擦学专业知识的复杂数值模型,SIMTEC 团队首先通过滑动轴承的长度、厚度和楔形形状来定义滑动轴承的几何,并将润滑剂置于两个固体之间。然后将顶部固体设置为静态的(ut= 0 m/s),底部固体以速度 ub 滑动。载荷 (w) 被施加在顶部固体上,在润滑剂中产生流体动压,并传递到底部固体。润滑剂的流动将压力分散在顶部固体的汇聚形状中,使得底部固体的平均压力变为 w /(宽度*长度)。
该团队考虑了工业机械中常见的各种条件。需要考虑这些条件,以预测其对薄膜厚度和摩擦的影响。这些影响包括固体的几何形状和线性变形、散热和薄膜本身。
涵盖这些现象所需的控制方程包括:
- 雷诺方程
- 膜厚表达式
- 固体变形
- 负载均衡
- 热传递
- 本构关系,包括:
- 可压缩性
- 压黏性
- 剪切稀化
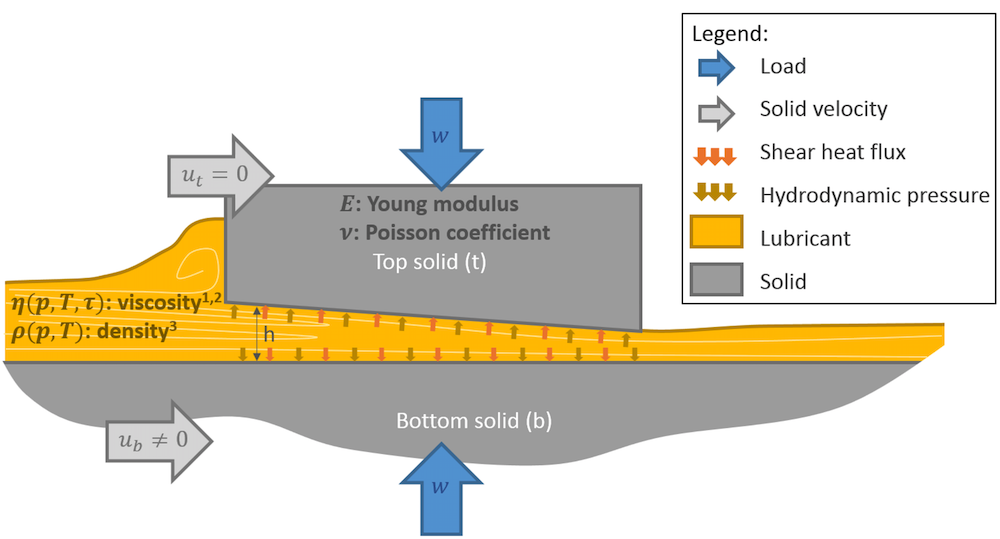
滑动轴承示意图。图片由 SIMTEC 提供。
SIMTEC 专家创建的这个数值模型和仿真应用程序涉及复杂的数学和科学知识,但他们尽最大努力让没有深厚摩擦学背景的用户也可以使用它。
评估和验证数值模型结果
通过数值模拟,SIMTEC 团队能够验证其模型的结果并将其与已发表的文献结果进行比较。此外,他们能够对各种工作条件下出现的常见问题进行模拟,用来预测和解决接触、整体轴承和系统的摩擦和磨损问题。这对于了解摩擦学在各个领域的应用非常有用,例如团队所提到的,径向轴承、轮胎、齿轮、人工髋关节、断裂和发动机等方面经常存在摩擦学问题。
作为验证案例,该团队研究了与等黏性且不可压缩的牛顿润滑剂的简单等温刚性接触。如下图所示,结果与参考数据(分析方法)非常吻合。实心方块表示的是模拟的数值结果,轮廓圆圈代表参考结果。
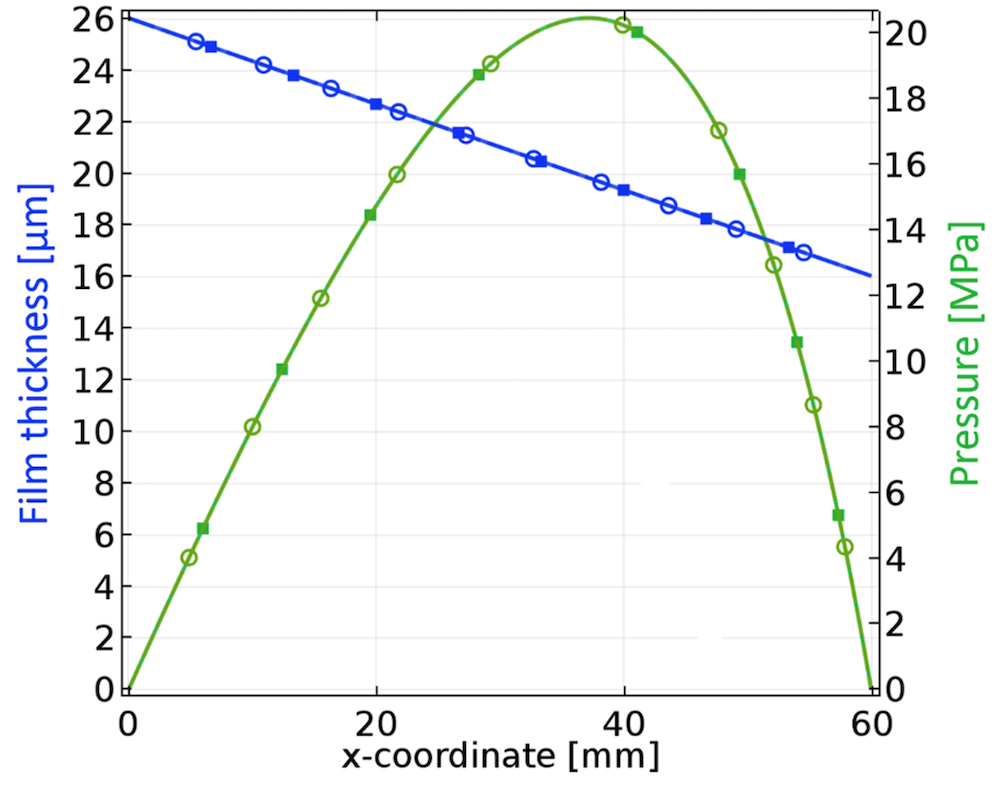
比较数值结果和参考值之间的薄膜厚度(蓝色)和压力(绿色)。图片由 SIMTEC 提供。
该团队还研究了在大速度和大负载条件下(ub = 20 m/s 和 w = 80,000 N)下热效应的影响。他们发现,虽然压力分布并没有真正受到热效应的影响,但当包括热效应时,最小薄膜厚度会减半,如下图所示。这些结果表明,工程师应注意其触点设计中的热效应,否则会大大高估薄膜厚度并低估磨损和使用寿命。
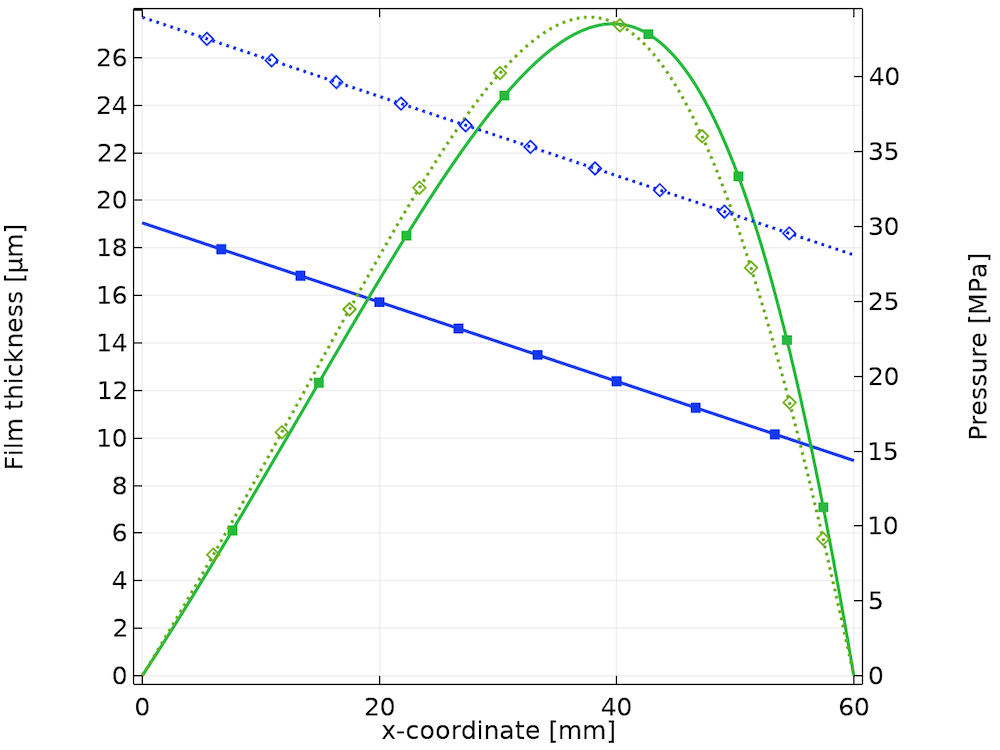
比较相同情况下的薄膜厚度(蓝色)和压力(绿色),有(实心方块)和没有(轮廓方块)热效应。图片由 SIMTEC 提供。
最终,这些结果,以及针对不同物理现象的类似研究结果帮助他们预测了摩擦和磨损。
虽然极其精确的结果需要复杂的流变学建模,但幸运的是,现在我们通过这里讨论的模型已经能够为实际工业案例提供定量预测了。SIMTEC 团队能够预测由于剪切速率增加导致摩擦增加,又由于热和非牛顿效应而导致摩擦下降,如下图所示。由此,我们获得了滑动轴承摩擦的基本预期行为。
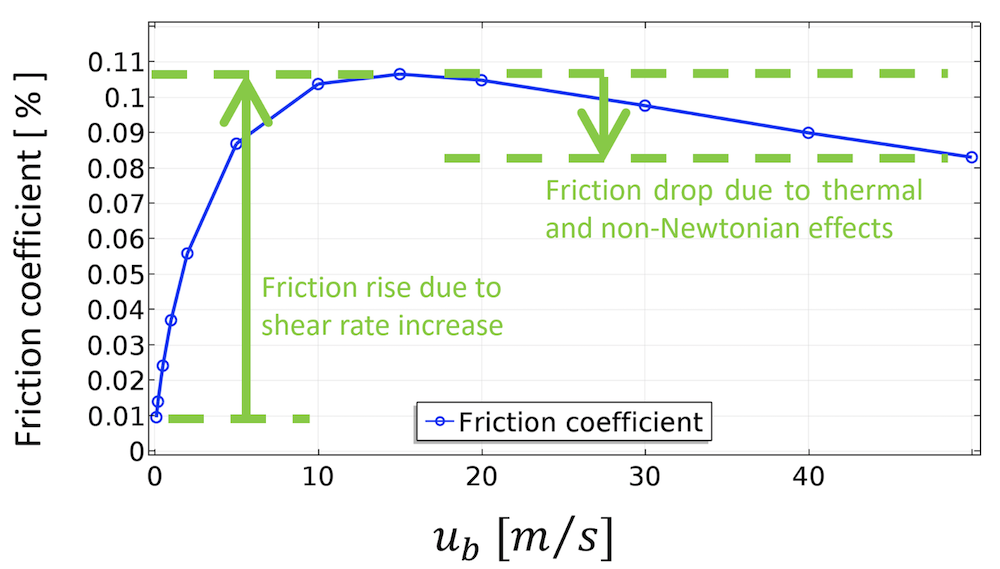
滑动轴承的摩擦预测。图片由 SIMTEC 提供。
至于磨损,仿真结果有助于确定滑动轴承所需的操作条件。该滑动轴承需要以 ub≥ 1 m/s 的速度运行才能有效。
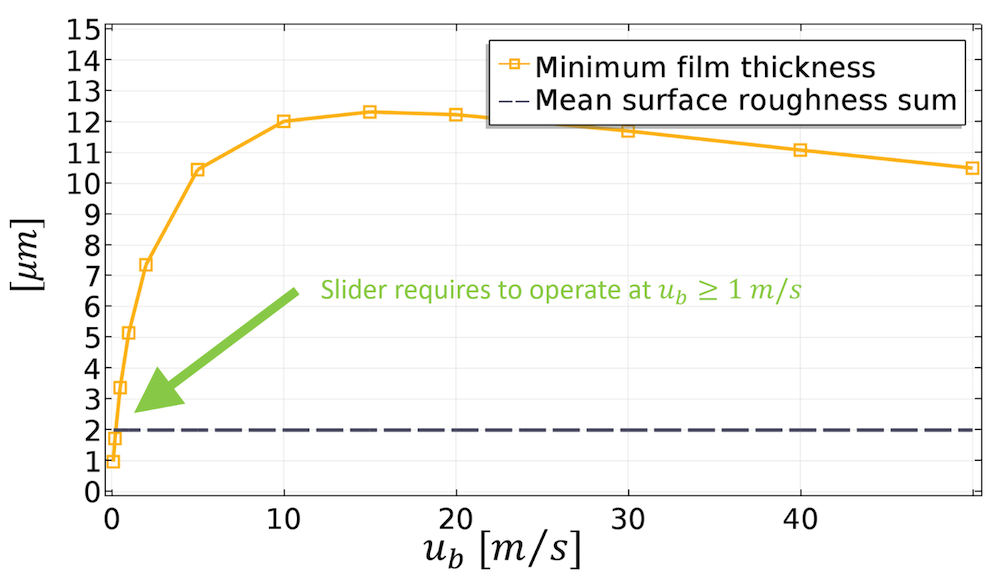
滑动轴承的磨损预测。图片由 SIMTEC 提供。
为了轻松求解所涉及的方程并使客户能够访问模拟,SIMTEC 创建了一个用户界面友好的应用程序,在这个应用程序里用户可以分析润滑垫在多种条件和参数下的行为。他们构建了一个演示应用程序,以方便任何感兴趣的人都可以看到自己运行分析是多么容易。
“我们的滑动轴承演示应用程序专门用于滑动轴承的建模,”SIMTEC 团队说,“用户可以在基本和高级假设下定义各种几何形状、工作条件和润滑剂。在演示应用程序中,可以触发所有参数,但只能同时选择几个参数。当然,完整的应用程序没有这样的限制。”
该应用程序可以模拟如上图所示的润滑垫的几何形状。图片由 SIMTEC 提供。
下一步
想自己动手尝试滑动轴承演示应用程序吗?请联系 SIMTEC,申请免费、安全的访问。
SIMTEC 还可以提供根据您的需求量身定制应用程序。
边坡稳定性分析对于确保堤坝的可靠性和附近人员的安全至关重要。通过在 COMSOL Multiphysics® 软件中使用剪切强度折减法,土木和岩土工程技术人员可以评估堤坝的稳定性,从而预测事故,防止悲剧发生。
为什么要分析大坝事故
如果大坝发生事故,后果可能是毁灭性的,甚至是致命的。举个例子,奥斯汀大坝建于 19 世纪晚期,位于德克萨斯州奥斯汀附近,造价昂贵,建造难度也很大。然而,许多市民认为大坝会吸引商业并为城市供电。1900 年 4 月 7 日,前一周的强降雨和洪水导致大坝后面的湖水膨胀。大坝抵挡不住水的力量,最终破裂了。大坝部分坍塌,排出洪水,500 多个家庭遭受生命和财产威胁。
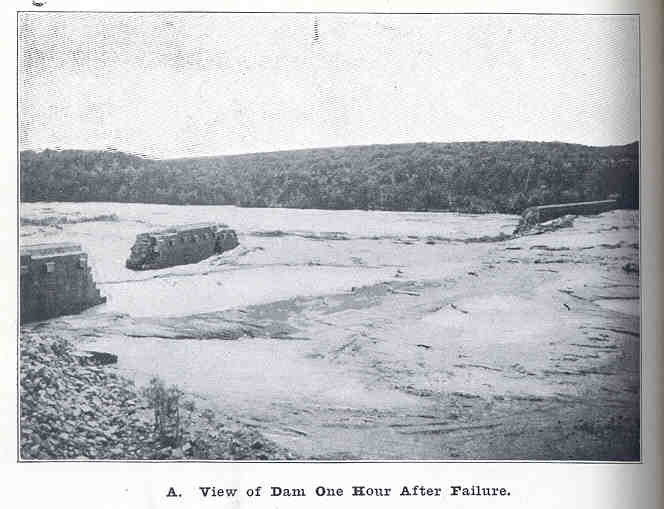
奥斯汀大坝坍塌一小时后造成的破坏。图片来自公共领域,通过 Wikimedia Commons 分享。
在所谓的“花岗岩大坝溃决”之后,大坝的结构完整性受到质疑。人们猜测,由于设计和施工质量欠佳,大坝的倒塌是不可避免的。
然而,在建造之前相关人员就可以分析大坝的稳定性和可靠性。比如说,边坡稳定性分析可用于预测因各种载荷和环境条件引起的堤坝土壤的沉降、变形和滑移。
进行边坡稳定性分析有许多方法。在这里,我们讨论了利用 COMSOL Multiphysics 和附加的“岩土力学模块”对这一过程进行建模的技术,其中使用了“案例下载”中的路堤边坡稳定性教程模型。
强度折减和安全系数
稳定性 是指边坡抵抗将地球物质推下边坡的力的能力。剪切强度折减(SSR)法用于计算边坡在事故点或失稳点 的安全系数。
在本文讨论的模型中,我们使用 SSR 法对堤坝进行了边坡稳定性分析。该模型还采用平面应变近似在二维模式下对堤坝进行建模,其计算效率高于三维分析。
安全系数(FOS)定义为保持整个表面平衡所需的土壤可用剪切强度之比。FOS 比率表明结构(本例中是大坝)能承受多少载荷。在边坡稳定性背景下,FOS 理想情况下是指不会导致边坡(本例中是堤坝)中材料滑动的比率。
FOS 不是路堤可靠性的衡量标准,而是边坡稳定性分析中抵抗任何驱动力的相对指标。如果 FOS 等于 1,则结构或部件承受其能承受的精确应力,增加或承受更高的应力(或载荷)将导致结构失效。对于 FOS 值为 2 的情况,结构或部件可能将在两倍的工作应力下失效。如果 FOS 小于 1,则表示结构不稳定。
想想你小时候在沙滩上建的沙堡。如果你堆了一堆沙子,然后慢慢地把你的手以一定角度放在沙堆上,用一定的力压住你手下的沙子会使沙子“滑动”并向边坡底部移动。现在,想象一下,在沙堡周围的沙地上挖一条深沟:你越挖越深,深沟最终会因边坡强度降低而坍塌。
边坡土壤特性由以下元素表示:
- 达西定律:
- 孔隙压力
- 流体通过多孔介质的流动
- 莫尔-库仑准则:
- 弹塑性分析
包括达西定律在内的土壤定律可以解释路堤中的压头,从而可以区分饱和与非饱和条件。然后,通过在固体力学 接口中添加莫尔-库仑准则,可以确定边坡的稳定性。
莫尔-库仑准则
莫尔-库仑理论是一个数学模型,描述了材料(特别是脆性材料)如何对剪切应力和法向应力做出反应。莫尔-库仑准则是岩土工程中常见的破坏准则,它证明了破坏点法向应力与剪切应力之间的线性关系。
在 SSR 方法中,莫尔-库仑材料参数是 FOS 的函数。利用 SSR 技术,FOS 不仅影响内聚力,还影响内摩擦角。
内聚力描述了材料粘在一起的强度。想象一下,将沙子装入沙堡的模具中。如果沙子是湿的,当翻转模具时,沙子不太可能散开。
内摩擦角描述了土壤的摩擦剪切阻力。如果将沙子倒入表面上的某个特定位置,沙子就会堆积起来,但如果你尝试使用不同的物品(如弹珠)执行相同的任务,结果就不一样了。弹珠是完美的圆形,会一个接一个地滑过去,到达你倾倒的表面(右),但由于内摩擦角较大,沙子会堆积成一堆(左)。
根据莫尔-库仑准则,这些因素决定了土壤的抗剪强度,我们可以根据这些因素预测堤坝边坡滑动或保持不变的可能性。
解释仿真结果
为了找到堤坝达到不稳定状态的点,我们可以系统地运行模型来增加 FOS 值,直到它不能收敛,不能收敛的点表明边坡不再稳定;也就是说,我们已经确定了它的预期 FOS。
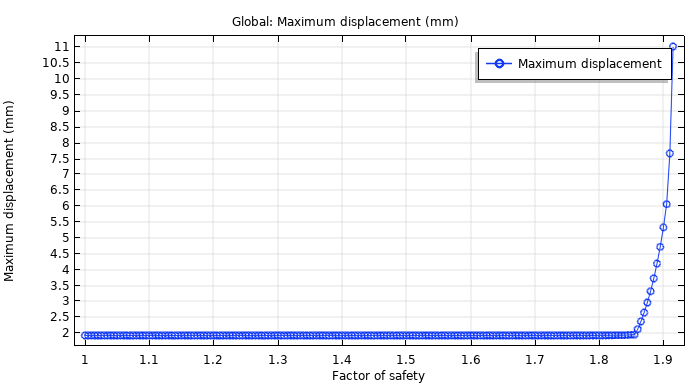
堤坝最大位移与安全系数的关系图。



左:堤坝中的压头。中:塌陷前的有效塑性应变。右:塌陷前的滑弧。
这里,对于超过 1.915 的 FOS 值,弹塑性分析不收敛。如上所述,FOS 接受的最低值为 1,而 2 表示结构在两倍的工作压力下失效。当 FOS 为 1.915 时,土壤的可用剪切强度几乎是维持边坡所需强度的两倍。此时,由于应变增加和随后剪切强度的降低,边坡会坍塌。这种坍塌是由塑性应变局部化到剪切带中形成滑弧而导致的。
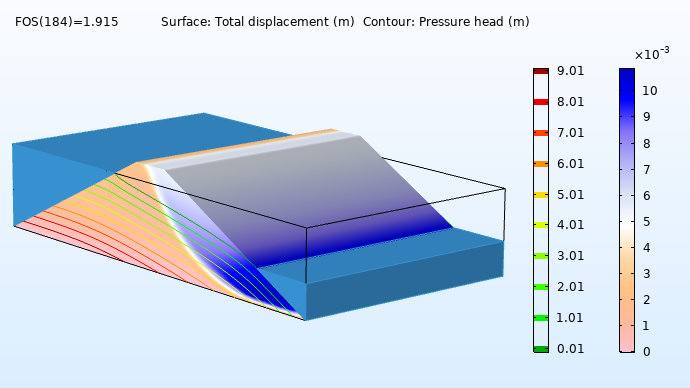
边坡坍塌前的总位移。
一般来说,边坡稳定性可用于评估人工建造和自然形成的大坝和边坡的稳定性和安全性。这种类型的分析可用于观察荷载条件下的破坏机制,并引起对其他因素(例如植被和土壤变化)的关注,这些因素可能影响自然形成的边坡。
后续操作
亲自尝试操作:单击下面的按钮访问教程模型(下载 MPH 文件需要有效的软件许可证。)
扩展阅读
阅读与岩土力学相关的其他博客文章: