Jan Czochralski 在研究金属结晶的速度时,将装满熔融锡的热坩埚放在桌子上冷却。他专心致志地工作,不小心把笔插入了熔融的锡里,而不是墨水瓶中。注意到自己的失误后,Czochralski 把笔拔了出来,却发现笔尖上挂着一条凝固的金属丝……
直拉法背后的历史
后来,Czochralski 证明了这种凝固金属是单晶体。将近 110 年后,他的简单失误被公认为直拉法奠定了基础。该方法是制备单晶硅的最重要方法之一,而单晶硅是一种广泛应用于电子产品制造的材料。
如今,直拉法采用的工艺与 Czochralski 意外的钢笔蘸取过程类似。首先,在坩埚中熔化高纯度的半导体级硅。然后,加入掺杂的杂质原子,使硅掺杂变成正型或负型硅。接着,把固定在一根棒上的籽晶浸入到熔化的混合物中,并在氩气的惰性气氛里小心地向上提拉,同时进行旋转。最后,熔融物会在籽晶上形成一根大的圆柱形单晶锭。
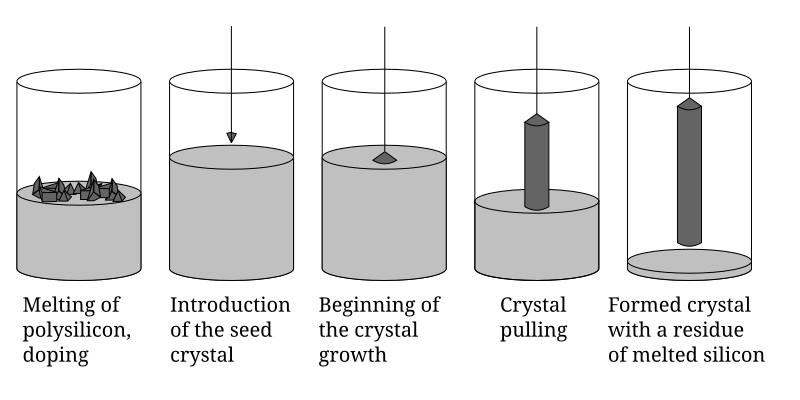 直拉法的各个阶段。这张照片已进入公有领域,通过 Wikimedia Commons 共享。
直拉法的各个阶段。这张照片已进入公有领域,通过 Wikimedia Commons 共享。
Czochralski 探索了使用锡、铅和锌等金属制造晶体的方法,并于 1917 年发表了有关该方法的论文。这篇论文和方法一经发表便引起了人们的极大兴趣,但直到 20 世纪 40 年代末,这种方法才成为如今的主流技术。这在很大程度上要归功于贝尔实验室的研究人员,他们重新发现了这种方法,并利用它生产硅和锗晶体以开发半导体。从那时起,直拉法就成为半导体工业的基石。

波兰化学家Jan Czochralski,1929 年在华沙理工大学担任教授时的照片。这张照片属于公有领域,通过 Wikimedia Commons 共享。
直拉法是制备单晶硅(mono-Si)晶锭最常用的方法。该方法可以制备出长达 2 米的晶体锭,之后这种晶体锭可被切割成标准尺寸的晶圆。这些晶圆可用于制造集成电路,在光伏领域则用于制造太阳能电池。在这篇博客中,我们将探讨如何使用 COMSOL Multiphysics® 软件模拟保护气体流动和对流传热,以维持晶体生长界面所需的温度梯度。
典型晶体生长炉的模型定义
通过精准调控加热功率、拉速和晶体旋转速率,可以有效控制晶锭的形状,尤其是直径。可以在原型阶段对这三个因素进行调整,但必须使用昂贵的物理材料。作为这些实验的补充,建模和仿真可用于虚拟复制、监控和更改设计,从而减少所需的物理实验次数。
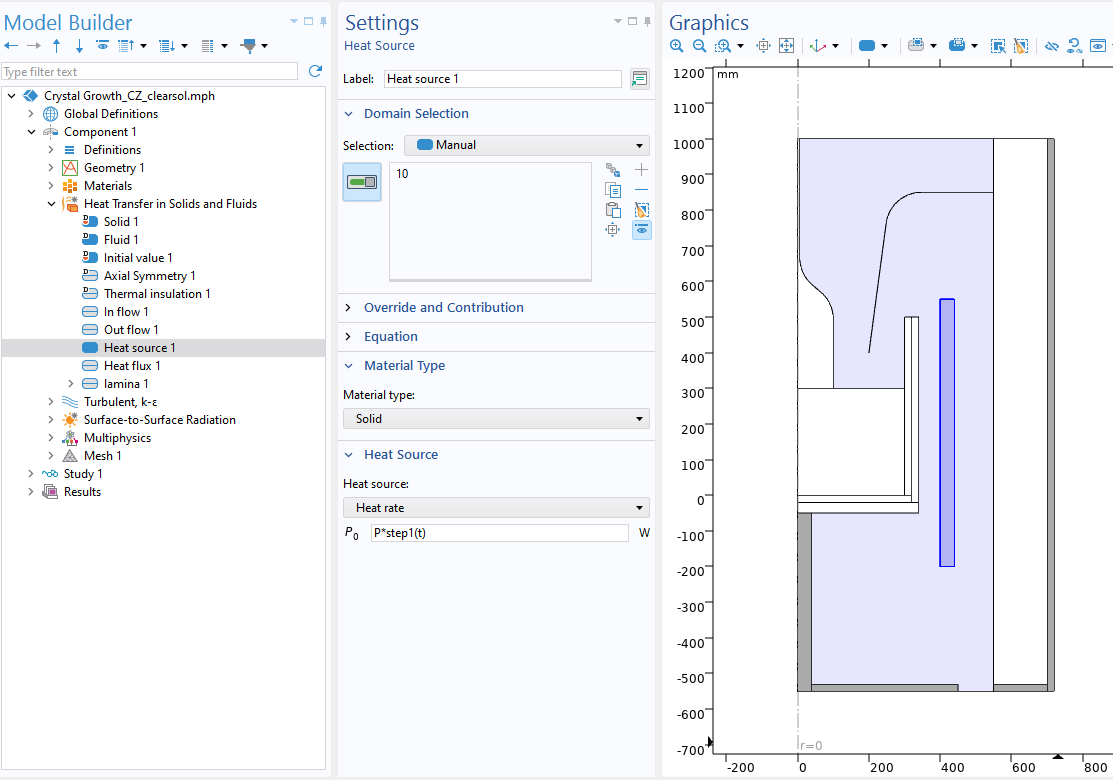
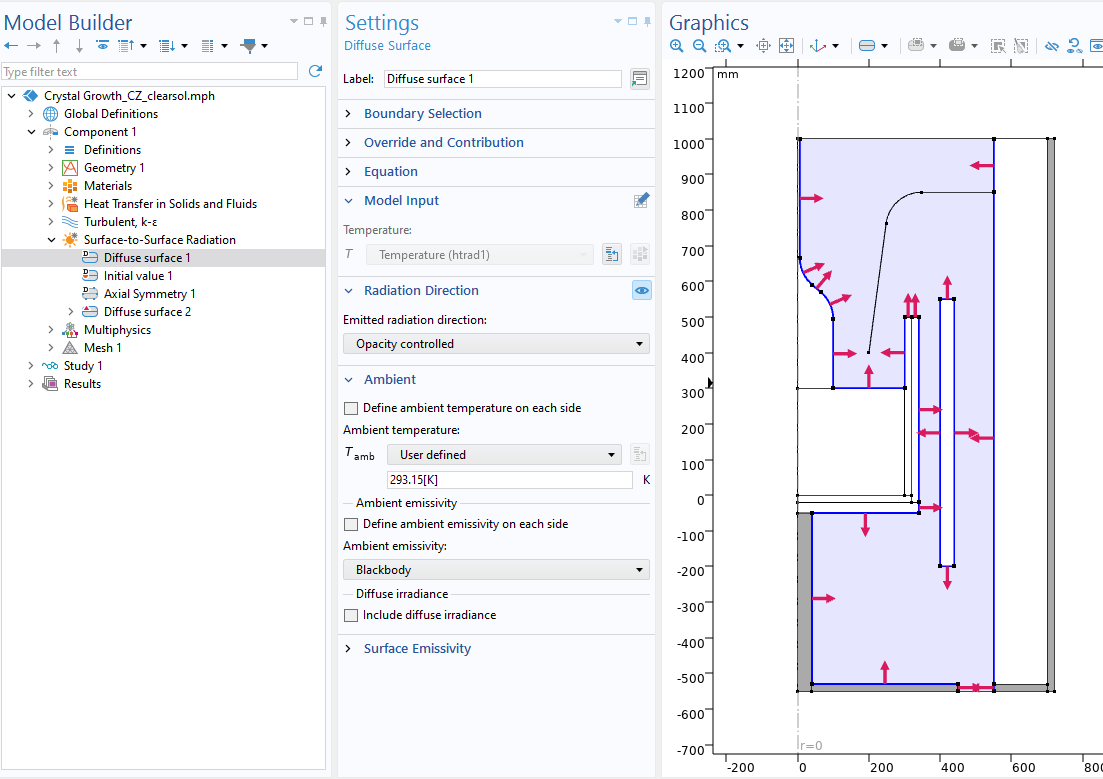
查看在软件中建立的热传导(左)和热辐射(右)模型。
直拉法晶体生长炉的热分析教程模型模拟了上述过程。该模型的几何结构包括一个装有熔体的石英坩埚和一根位于熔体表面中间的晶棒,二者均放置在生长炉内。在生长炉内,氩气流冷却晶棒,以维持所需的温度梯度,并将挥发性物质排出炉外。炉内放置了一个石墨加热器,用于维持稳定的温度。坩埚和晶棒均以 5 r/min 的速度旋转,但方向相反。上述过程的整个几何结构具有旋转对称性,因此可以在 COMSOL Multiphysics® 中使用二维轴对称模型创建。
假设热传导是主要的传热机制,对熔体、晶棒、石墨加热器和炉壁的热传导进行模拟。炉内表面之间的热传导由表面对表面辐射模型计算。炉内氩气的非等温流动采用弱可压缩流假设进行建模,同时将 k-ε 湍流模型和湍流中的热传递相耦合。晶棒和坩埚的旋转则使用滑移壁条件描述。
此模拟的重点是研究保护气流和对流传热,找出维持晶体生长界面所需的温度梯度和最佳参数。
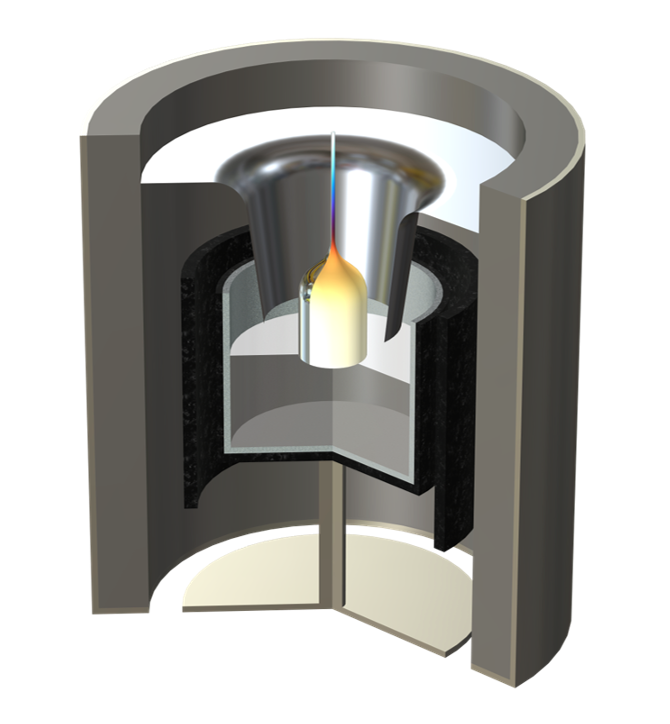
使用COMSOL模拟的晶体生长炉模型。
在模型几何结构内部,石墨加热器的功率为 310 kW,保护性氩气的引入速度为 100 L/min。炉压保持在 2500 Pa。坩埚以 5 r/min 的速度正向旋转,晶体棒以 5 r/min 的速度逆向旋转,从而产生有效晶体生长所需的扭转运动。这种熔炉的旋转速度远高于拉速,因此本模拟忽略了拉速。
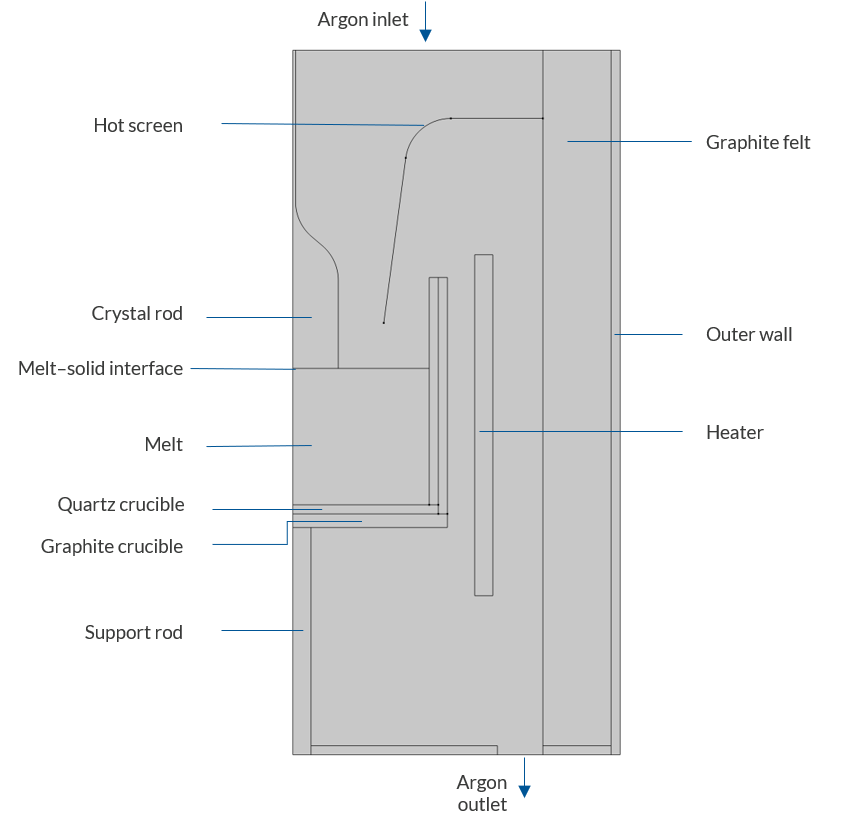 标注了各个部件的晶体生长炉几何图形。
标注了各个部件的晶体生长炉几何图形。
结果讨论
在模型中,我们进行了两步研究。第一步是求解稳态流动方程,为随后的瞬态研究步骤建立良好的初始条件。在瞬态研究步骤中,流动方程和传热方程是完全耦合求解的。
流场
仿真计算得出的流场显示,晶棒表面附近的流速最大。热屏和晶棒之间存在一个回流区,该回流区主要由热屏高温产生的浮力驱动形成,来自入口的轻微向下流动也对其产生一定影响。这种高速运动有利于有效散热,从而在晶棒内形成明显的温度梯度。
坩埚和加热器之间的水流向下流动,这与直觉相反,因为人们可能会认为这一区域会产生烟囱效应。但实际上这种效应发生在加热器外部,即加热器和炉壁之间,那里的水流主要是向上流动的。
值得注意的是,炉内自由对流的影响比氩气的入口和出口流动的影响更为显著,后者在图中几乎无法辨别。如果没有模型,预测整个流场将非常困难。
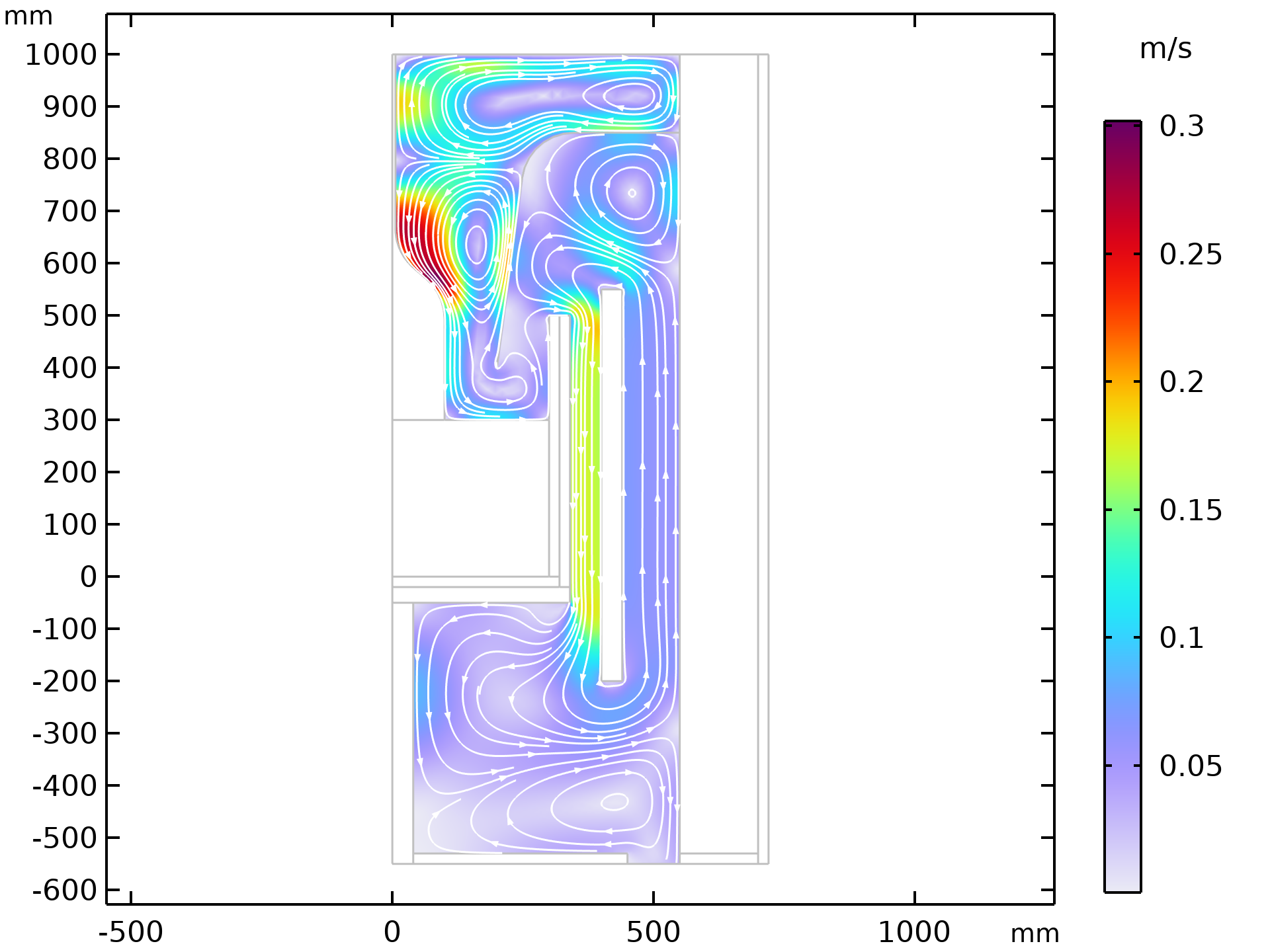 炉内流场图。
炉内流场图。
温度
我们的研究表明,熔体与晶棒接触面的平均温度在大约 400 分钟后达到稳定状态。熔化温度(Tm=1414 °C)等值线靠近该接触面,见下图中的 1415 °C 等值线。晶棒与熔体接触点的温度在 1403—1407.5°C 变化,最高温度出现在晶棒的中部,接近于 1414 °C 的实际熔化温度。温度沿晶棒高度方向逐渐降低,在 Z 方向上呈现出 500—100 °C/m 的温度梯度。这表明氩气流对单晶棒进行了有效冷却。
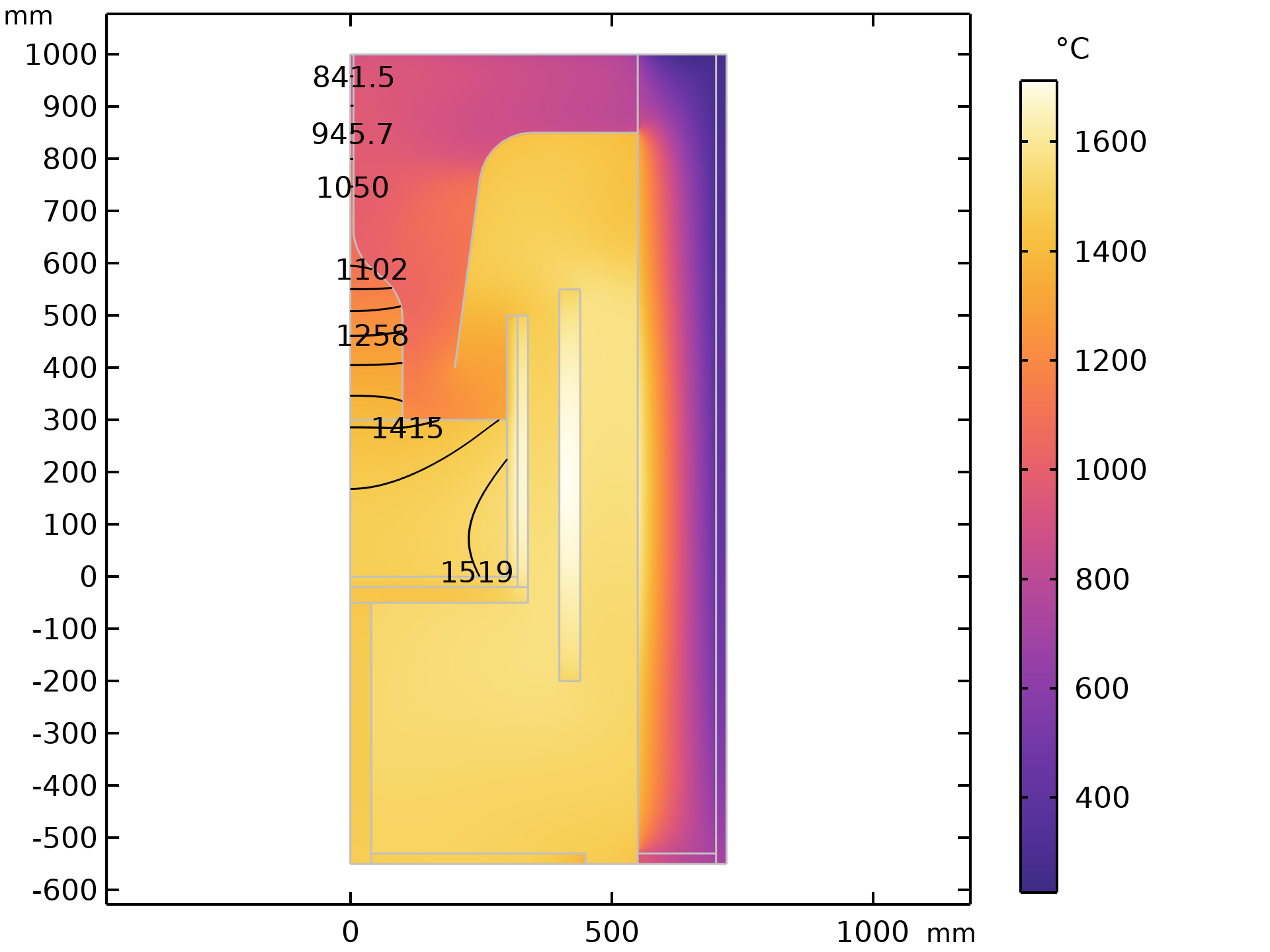
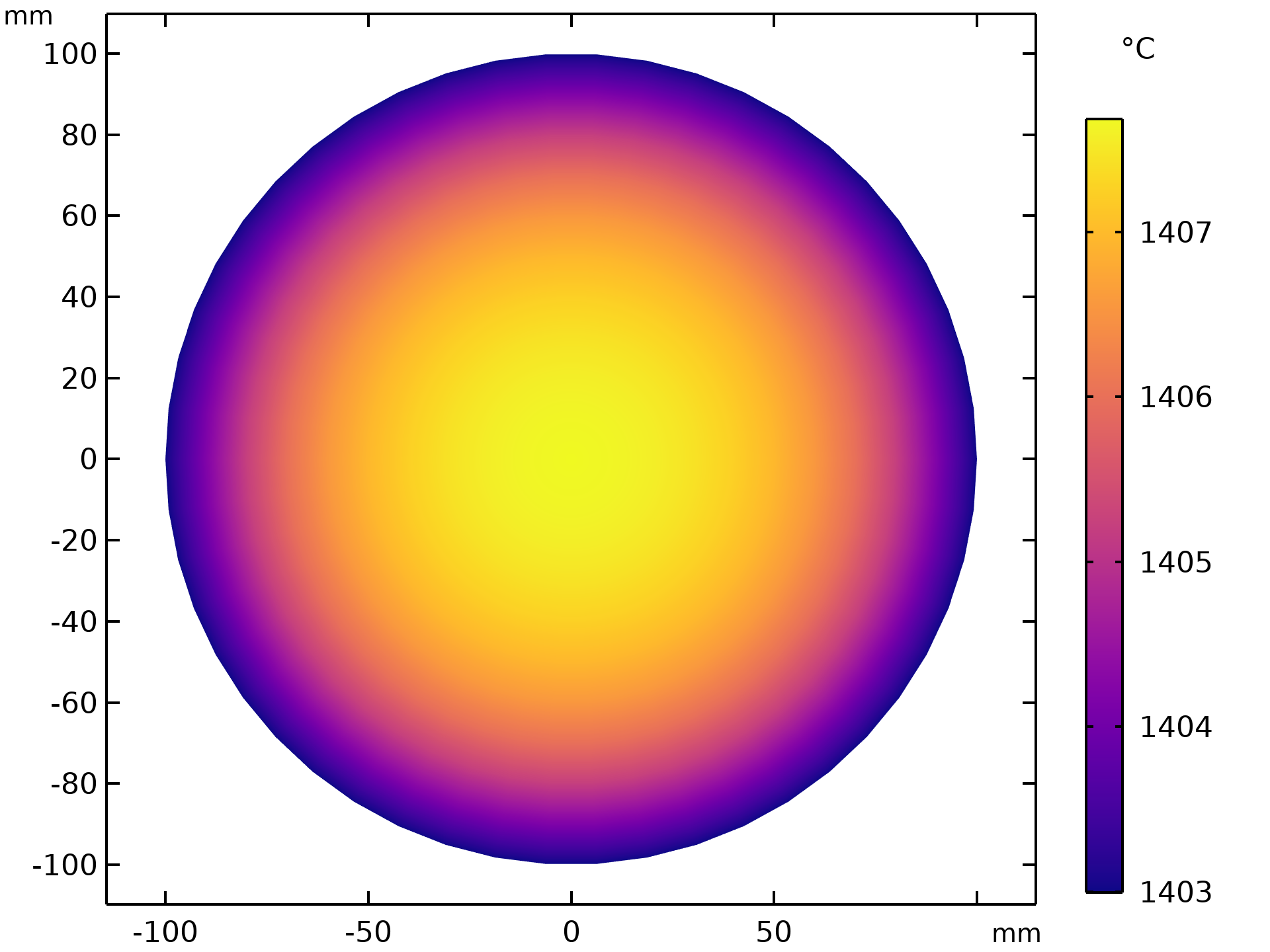
左图:突出显示了 600 分钟时平均温度的模型图。右图:晶棒与熔体接触面的温度分布。
晶体炉模型的扩展
借助上述仿真模型,我们将晶体和熔体模拟为固体,并在设计阶段进行了热分析。该模型既可以实现这一目标,也可以进行扩展。例如,您可以对其他加热方式(如感应加热)进行模拟。更复杂的扩展可能还包括重点模拟熔体中的流动及其内部的自然对流、表面对流(马兰戈尼效应)和强制对流(磁性流体)。您还可以使用 相变 接口查看从熔体到晶体的相变,以及晶体潜热和拉力的凝固过程。虽然本演示中忽略了晶体提拉速度,但您也可以在壁边界条件中设置该速度,即切向的移动壁速度。
动手尝试
想自己亲自动手尝试模拟这个 Czochralski 晶体生长炉吗?COMSOL 案例应库中提供了相关的 MPH 文件和分步说明,欢迎下载。
汽车行业正在快速创新以生产更加环保的汽车,尤其是通过使用电动马达、自动驾驶系统和主动空气动力学等技术。主动空气动力学系统能够提升车辆的操控性和稳定性,改善燃油效率并优化冷却效果(参考文献 1–3)。主动空气动力学的一个非常成功的应用是世界一级方程式锦标赛(Formula 1®),其中的可调式尾翼系统(DRS)使比赛更加精彩。这篇博客,我们将使用一个在 COMSOL Multiphysics® 软件中建立的简单模型来研究 DRS 对车辆阻力和下压力的影响。
汽车中的主动空气动力学
长期以来,汽车工程师一直致力于通过微调空气动力学来提高汽车的效率、速度和稳定性。汽车最重要的两个空气动力学指标是阻力和下压力。阻力是一种阻碍汽车向前行驶的力,能够降低速度和燃油效率;下压力则是一种垂直向下的力,它通过将汽车推向地面来增加牵引力,从而提高汽车的稳定性和操控性。下压力通常是有益的,但产生下压力往往会增加阻力,从而在速度和稳定性之间产生权衡,设计师必须进行平衡才能实现汽车的速度、操控性和燃油效率的综合提升。
主动空气动力学通过一种动态移动组件的方法,实时优化阻力和下压力,从而提供更加精细和响应灵敏的驾驶体验,改变了汽车设计。与使用固定组件的传统被动空气动力学设计相比,主动空气动力学的特点是配置了可以改变位置和形状的机翼、襟翼和通风口等组件。在合法上路的汽车中,这些调整由利用实时数据并根据驾驶条件来改变这些组件的车载电脑控制。

Bugatti Veyron® 的尾翼在高速行驶时会升起,以产生更大的下压力。图片属于公有领域,通过 Wikimedia Commons共享。
1986 年发布的 Porsche®959 是第一款配备主动空气动力学系统的合法公路用车。这项技术很快便引起了人们的关注,并在布加迪威龙(Bugatti Veyron®)、三菱(Mitsubishi® 3000GT)和帕加尼 (Pagani Huayra®) 等高性能汽车的设计和性能中发挥了重要作用。如今,许多合法上路的汽车都采用了主动空气动力学设计,部分原因是为了提高燃油效率。汽车可以配备多种主动空气动力学特征,包括:
- 可以根据车速和驾驶模式升高和改变角度的可调式尾翼,用于平衡燃油效率、提高车辆性能和充当空气制动器(参考文献 1)
- 用于提高操控性的可调节式前分流器(参考文献 1)
- 可以根据发动机的冷却需求打开或关闭的前格栅中的主动式挡风板,从而在不需要冷却的情况下减少阻力(参考文献 2)
另一个采用主动空气动力学创新技术的示例是当今最惊险刺激的高性能运动之一—一级方程式赛车中的 DRS。

2015 马来西亚大奖赛(2015 Malaysian Grand Prix)。图片来源于 Wikimedia Commons,获 知识共享署名–相同方式共享 4.0 国际版许可。
赛车运动中的 DRS
DRS 被视为一种主动空气动力系统,因为它涉及对一级方程式赛车的空气动力组件进行实时调整。与前面提到的公路赛车不同,一级方程式赛车的 DRS 可让驾驶员直接控制该系统。
在赛车运动中,DRS 旨在减少追赶赛车的空气阻力,以在比赛中获得超车机会。通过减少空气阻力,DRS 能够使赛车在赛道的指定直线段(也称为“直道”)获得显著的速度优势,从而更容易超越前车。这就为许多观众带来更加激动人心和充满活力的比赛。因此,DRS 已成为大奖赛(Grand Prix™ )比赛中关键的战略和战术要素。

红牛赞助的一级方程式赛车上的可调式尾翼。图片来自 Wikimedia Commons, 获 知识共享署名–相同方式共享 4.0 国际版许可。
DRS 的核心组件是可调式车翼,我们在此将其称为 “DRS 襟翼”。DRS 襟翼可在两个位置之间转动,一个用于产生高下压力,另一个用于产生低阻力。当 DRS 启动时,DRS 襟翼上升以减小攻角,即弦线与迎面气流或车辆行驶轨迹之间的夹角。这种变化会降低翼面产生的下压力,进而减小空气阻力。阻力减小后,汽车受到的空气阻力也会减小,从而能在直道上达到更快的速度。赛车工程师估计,DRS 工作期间的车速可提升至 10–12 km/h(6.2–7.5 mph)。
DRS 被设计为仅在最适合超车的指定直道上使用。这是因为下压力减小也意味着赛车的抓地力降低,从而使稳定性降低,最终导致汽车在过弯道时非常不安全。当驾驶员驶出 DRS 区域并关闭系统时,DRS 襟翼会下降,阻力和下压力会恢复到正常水平,从而提高赛车的抓地力。
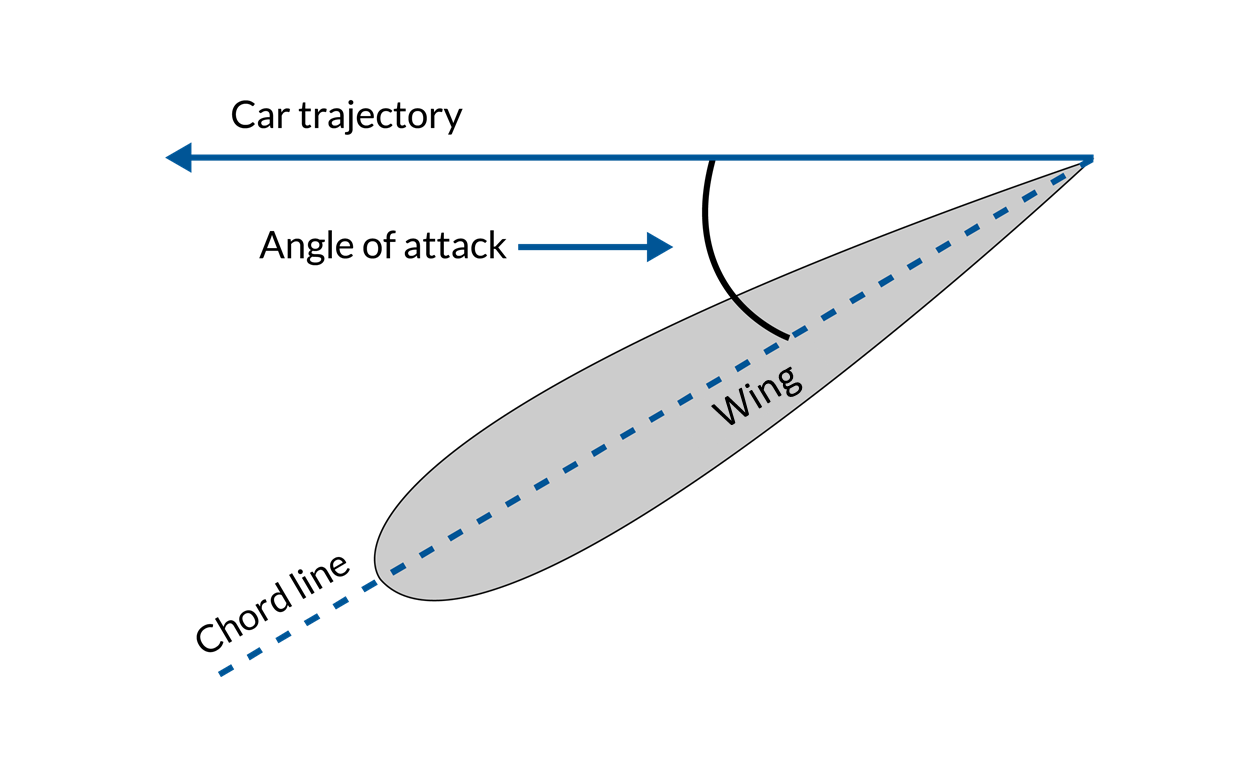
机翼的攻角,在决定机翼产生的阻力方面起关键作用。
模拟 DRS 效应
在汽车设计中,计算流体动力学(CFD)可用于模拟和分析汽车周围的气流,并预测汽车设计的改变如何影响其空气动力性能。CFD 仿真具有独特的优势,因为它可用于直观地显示气流模式、评估车辆各组件所受到的气动力,以及优化设计参数,同时避免了反复试验所带来的成本和时间问题。CFD 仿真不仅是设计主动空气动力组件的关键步骤,也在汽车制造的其他几个方面发挥着重要作用。
现在,让我们在 COMSOL Multiphysics® 中建立一个简单的 DRS 襟翼模型,来模拟类似于一级方程式赛车配备的可调式尾翼。模拟目标是对 DRS 运行期间尾翼上的空气阻力和下压力变化进行量化检测,以更好地了解激动人心的超车背后的物理原理。
一级方程式赛车的典型尾翼组件由两个横跨车身宽度的翼板组成。尾翼两侧安装了垂直端板,用于管理气流和减少翼尖涡流造成的阻力。在我们的模型中,为了简化分析,考虑了尾翼组件的二维横截面。这样,我们就可以忽略端板,只考虑两个翼板的横截面几何形状。我们将上翼称为 “DRS 襟翼”,下翼称为“主襟翼”。(注意,只有上翼是可调节的。)两个翼板均使用 NACA 6409 翼面。虽然 NACA 6409 翼面并不能真正代表一级方程式赛车的尾翼,但我们的模型旨在简单演示可调式襟翼对空气阻力和下压力的影响。在 DRS 襟翼的尾端固定了一个格尼襟翼(gurney flap),以在不显著增加阻力的情况下增加下压力。假设翼板是完全刚性的。
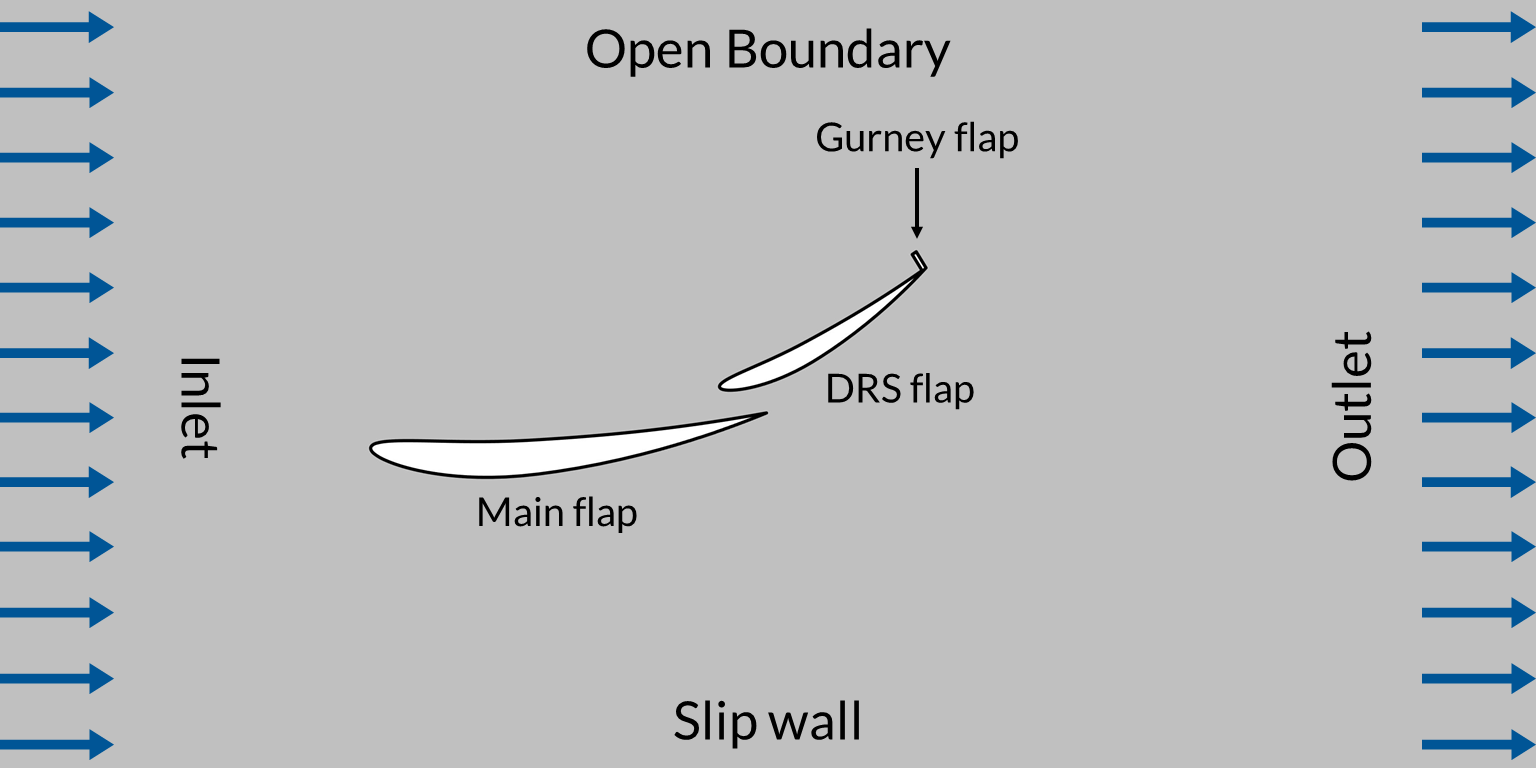
由两个 NACA 6409 翼板组成的模型的数值设置。入口和出口分别被定义为左边界和右边界。分别使用开放边界条件和滑移壁条件定义上、下边界。
使用 COMSOL® 中的 动网格 接口模拟 DRS 襟翼的驱动,使其与主襟翼间距不超过 85 mm。这符合一级方程式的规定,即 DRS 襟翼与主襟翼的最大距离为 85 mm。使用 湍流、k-ε 接口计算域中的气流。由于我们将参考坐标系固定在尾翼上,因此将进气速度定义为 90 m/s 来模拟赛车在赛道上以 323.7 km/h(201 mph)的速度行驶的情况。在 DRS 处于非激活状态(即 DRS 襟翼放下)时,执行稳态研究以获得稳态气流分布。然后,执行瞬态研究来模拟可调式襟翼的瞬态效应。
度量指标
阻力系数是一个无量纲数,用于测量物体在流体中运动时所受到的阻力或流阻。它表示流体(在本文示例中为空气)在物体周围流动的顺畅程度,阻力系数越小,通常表示阻力越小,空气动力学效率越高。阻力系数  可以表示为
可以表示为
式中, 是流体密度,
是流体密度, 是速度大小,
是速度大小, 是翼上力的 x 分量,
是翼上力的 x 分量, 是翼的横截面, 可表述为
是翼的横截面, 可表述为
和
式中, 是壁面剪切应力,
是壁面剪切应力,  是切向速度。对机翼边界进行表面积分。
是切向速度。对机翼边界进行表面积分。
下压力可以使用表达式  ,由牵引力的垂直分量
,由牵引力的垂直分量  计算。
计算。
模拟结果
下图中的动画演示了 DRS 运行期间的不同指标。本文,DRS 在研究开始后 2s 启动,然后大约持续 3s。在我们的模型中,运行时间有些随意,但这与比赛中真正的 DRS 操作非常相似。
动画 A 显示了网格如何随着 DRS 襟翼的移动而变形。图中显示了 DRS 襟翼从主襟翼上抬起的幅度。DRS 襟翼旋转 19.5˚ 相当于从主襟翼上抬起 84 mm,符合规定。
动画 A:仿真结果显示了使用 动网格 接口模拟的网格单元的变形(左)以及 DRS 襟翼相对于主襟翼的位置(右)。
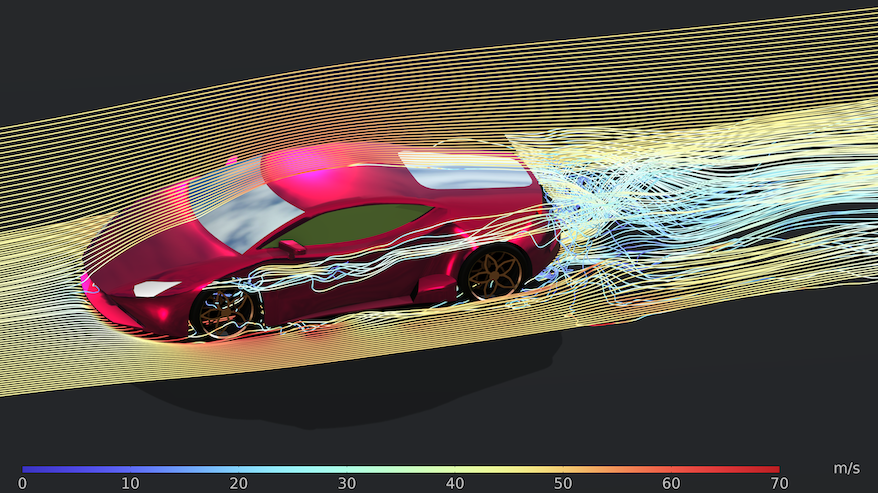
动画 B 显示了 DRS 运行期间的速度流线。从图中可以看出,当 DRS 启用时,空气的最大速度较低。但不应将这与汽车的速度相混淆,因为当襟翼升起时,汽车的速度会更高。
动画 B:仿真结果显示了速度分布和流线(左)以及域中的最大速度(右)。
动画 C 显示,当启动 DRS 后,尾翼的阻力系数最多可降低 27.1%。同时绘制了襟翼上的下压力,结果显示启动 DRS 后,襟翼上的下压力最多减少 23.6%。
动画 C:仿真结果显示了 DRS 运行期间的风阻系数和下压力。
虽然这些结果是通过任意几何形状建立的模型得出的,但在现实生活中应用 DRS 可对阻力产生重大影响。例如,在大学生方程式赛车中,DRS 可减少高达 78% 的阻力(参考文献 4)。阻力的减少会根据赛车的速度、空气动力设置、具体的 DRS 设计和赛道布局而有所不同。
仿真的优势
主动式空气动力学技术为高速赛车带来了显著优势,在合法上路的汽车中也越来越受欢迎。文中介绍的模型使用赛车尾翼组件的简单二维横截面表示,展示了可调式襟翼对阻力和下压力的影响。这种简单的模型可以帮助理解 CFD 原理,并展示了空气动力学的精彩应用。文中介绍的模型设置还可以扩展到使用 COMSOL® 中的 流-固耦合 多物理场接口来模拟襟翼在压力应力作用下的结构变形。
使用 COMSOL 模型研究汽车的空气动力学。
动手尝试
如果您想自己尝试研究可调式襟翼对阻力和下压力的影响,请单击下方按钮,进入 COMSOL 案例库,下载文中的相关模型。
参考文献
- J. Piechna, “A Review of Active Aerodynamic Systems for Road Vehicles,” Energies, 2021.
- C. Pfeifer, “Evolution of active grille shutters,” SAE Technical Paper, 2014.
- W. Yu and G. Wei, “A Review of the influence of active aerodynamic tail on vehicle handling stability,” Journal of Physics: Conference Series, 2021.
- R. Loução, D. Gonçalo, and M. Mendes, “Aerodynamic study of a drag reduction system and its actuation system for a formula student competition car,” Fluids, 2022.
- J. Noble, “How F1’s new active aero will work in 2026,” Autosport, 2024.
延伸阅读
阅读下列 COMSOL 博客,了解更多文中讨论的相关主题信息:
本文提供的信息与 2024 赛季相关。一级方程式赛车中的 DRS 系统将于 2026 年被更复杂的主动空气动力学系统取代,该系统可进行更多的动态调整(参考文献 5)。一级方程式赛车是一项不断变化和创新的运动,本文所讨论的技术在未来可能会过时。本文旨在展示仿真在理解空气动力学原理方面的功能,而非赛车运动的规则指南。一级方程式是 Formula One Licensing B.V. 的注册商标,大奖赛是其未注册商标。Huayra 是 PAGANI S.p.A. 的注册商标。 Mitsubishi 是 MITSUBISHI JUKOGYO KABUSHIKI KAISHA 的注册商标。Porsche 是 Dr. Ing. h.c. F. Porsche Aktiengesellschaft 的注册商标。
声阱为各种生物医学应用提供了一种操控细胞和粒子的无接触式方法。在典型的声阱设备中,压电换能器在流体中产生压力场,从而产生能有效捕获流体中微小悬浮物的声辐射力。这篇博客,我们将深入探讨一个包括热声流和粒子追踪的声阱模型。
声阱简介
1874 年,August Kundt 首次证明了声波可以对暴露粒子施加声辐射力。自 20 世纪 90 年代以来,这一原理就已经被应用在微流体装置和片上实验室系统中,如今,商业化的声阱设备已被全球生命科学实验室和医疗机构广泛采用,用于低浓度样品的富集和纯化,细胞之间的相互作用研究、粒子分选,以及现场即时诊断的细菌、病毒或生物标记物的分离等。
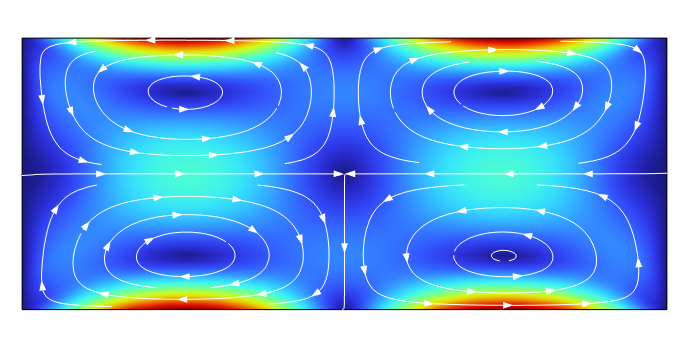
图 1 微流体通道横截面上的声流,可用于生物流体样品中对粒子进行浓缩或分离。
声阱中诱发的声波会产生声流,即在捕获位点周围形成快速移动的涡流。这种声流会对流体中的颗粒产生黏性阻力。同时,颗粒也会受到声辐射力的作用。对于大颗粒,声辐射力占主导地位,对于小颗粒,黏性阻力占主导地位。改变主导力性质的颗粒临界尺寸取决于具体的设备和颗粒的声学特性。在大多数设备中,声辐射力用于捕获或控制颗粒,因此,来自声流场的黏性阻力通常会阻止小于临界尺寸的小颗粒被声阱捕获。
了解这些信息后,让我们深入探讨如何在 COMSOL Multiphysics® 中模拟声阱。您可以从案例库中下载文中讨论的玻璃毛细管中的声阱和热声流三维模型。
声阱仿真
示例的三维声阱几何结构如下图所示。声阱系统的几何沿两个平面对称,因此只需要计算系统的 1/4 几何:装满水(蓝色)的 1/4 玻璃毛细管(黄色)及其下方的 1/4 微型压电换能器(灰色)。实际上,相较于 0.48 mm 的高度和 2.28 mm的宽度,约 5 cm 的玻璃毛细管非常长,因此使用完美匹配层(PML)对其两端进行模拟。完美匹配层是一个可添加到几何体中的域,用于模拟所有出射波的衰减和吸收。下图中绿色显示为包含 1/2 毛细管一端的完美匹配层。在此模型中,完美匹配层在玻璃毛细管和流体中都处于激活状态。
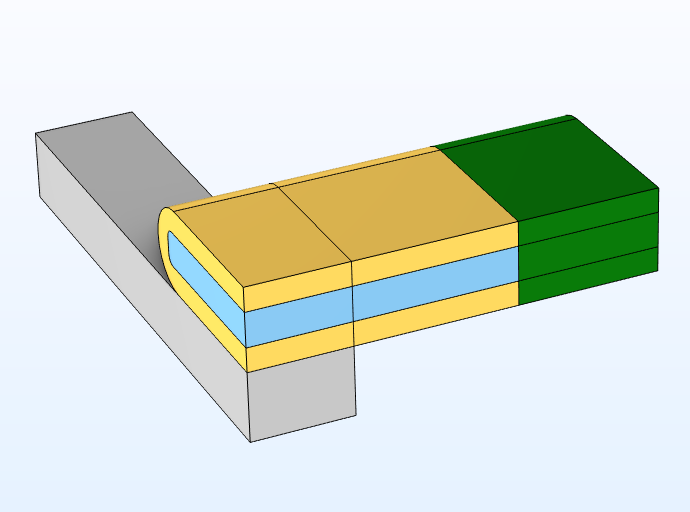
图 2 声阱的 1/4 几何结构。
声阱仿真是一个复杂的多物理场问题,涉及电磁学、固体力学、声学和流体流动等多种现象,某些情况下,还包括传热。压电换能器上的振荡电压差会引起压电材料振动,进而引起玻璃毛细管振动。这种压电效应通过耦合压电传感器域中的静电与压电传感器和玻璃毛细管的固体力学来模拟。为了模拟流体中产生的压力场,在玻璃毛细管和流体之间的边界上使用了声-结构多物理场接口,用于耦合固体力学与压力声学。
此外,压电换能器中的能量耗散会使系统升温,在玻璃毛细管和流体中产生温度梯度,进而在流体的声学特性中产生梯度,影响声流。非等温流动的多物理场耦合考虑了这种温度梯度的影响,将整个几何结构(固体和流体)的传热仿真与流体域中的蠕动流模型相结合。蠕动流和压力声学之间的耦合用于模拟声流。最后,为了验证声阱模型是否按照预期工作,使用了粒子追踪技术来确定流体中两类颗粒的轨迹,即大颗粒硅玻璃和小颗粒聚苯乙烯。
接下来,我们来看看仿真结果!
仿真结果
声场
声场使用频域计算。在频率为 3.84 MHz 的超声状态下激励系统。该频率波长的 1/2 约等于流体腔的高度。压电换能器中的电场、压电效应在压电换能器和玻璃毛细管中产生的位移场,以及由此在流体中产生的声压场如下图所示。在压电换能器上方,声场包含一个最小压力区域,称为压力节点。
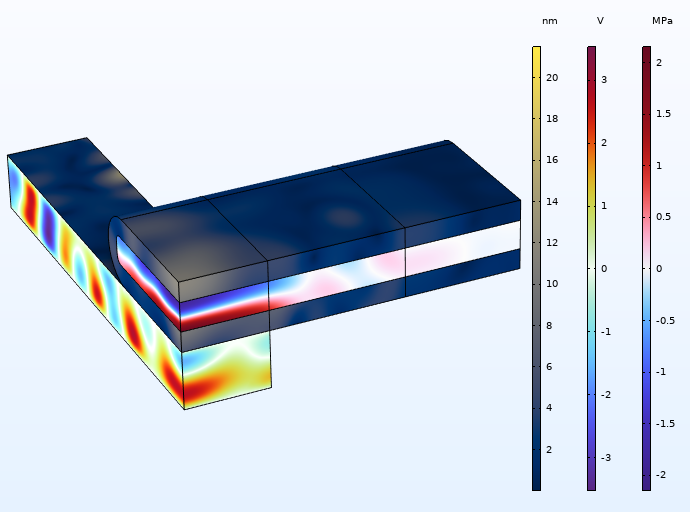
图 3 声阱中的位移场(nm)、电场和压力场。
声场中作用在颗粒上的声辐射力可以用 Gor’kov 势能来描述。图 4 显示了模型中计算的小颗粒聚苯乙烯 Gor’kov 势能。悬浮在流体中的颗粒会被推到最小 Gor’kov 势能处,从而被困在玻璃毛细管的中心。有关声辐射力的详细讨论以及如何使用 COMSOL Multiphysics® 计算声辐射力,请查看我们之前的博客。
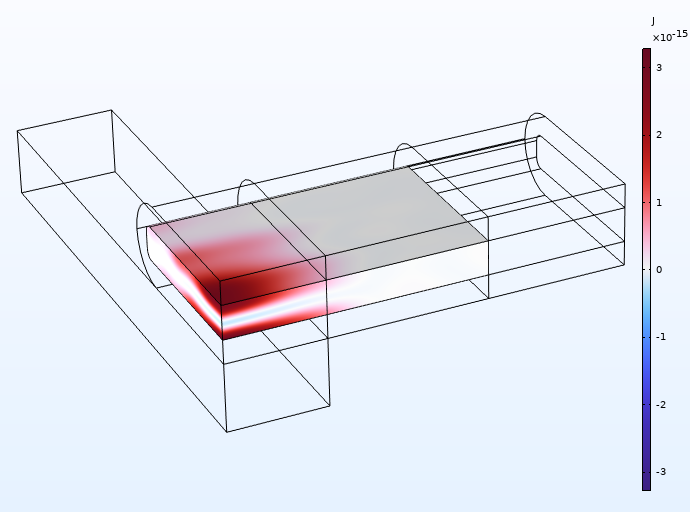
图 4 直径为 1 µm 的聚苯乙烯颗粒的 Gor’kov 势能。
热声流
声流的仿真结果如何?下图的模拟结果显示,压电换能器上方有四个涡流,这只能用温度场来解释。压电换能器的升温引起玻璃毛细管和流体产生温度梯度,从而产生流体密度梯度和可压缩性梯度。流体材料参数中的这些梯度与声学相互作用产生热声体积力,热声体积力产生声流,最终形成这种特定的声流模式。
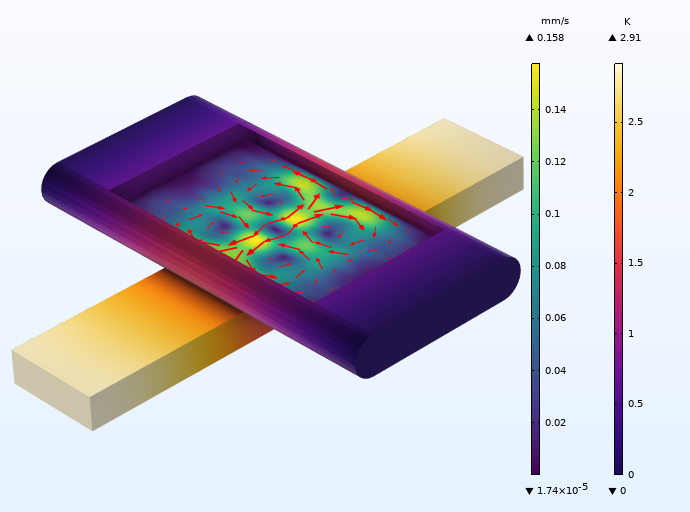
图 5 玻璃毛细管内的热声流和温度梯度。根据对称平面绘制的声阱实际几何。
粒子轨迹
通过粒子追踪,我们还可以了解具有特定性质的颗粒是否会被吸入声阱。下面的动画显示了直径为 10 µm 的大颗粒硅玻璃和直径为 1 µm 的小颗粒聚苯乙烯的计算轨迹。压电换能器上方的硅玻璃颗粒向玻璃毛细管中心移动并被困在那里,而较小的聚苯乙烯颗粒的移动则受流体流动的控制。
图6 大颗粒硅玻璃的运动轨迹。
图 7 小颗粒聚苯乙烯的运动轨迹。
动手尝试
有兴趣自己动手建立文中示例的多物理场模型吗?点击下面的按钮即可下载该模型的 MPH 文件:
扩展阅读
您也可以在 COMSOL 案例库中找到一些包含声流和声阱的教程模型:
暖通空调系统的作用不仅仅是在室外温度升高时提供平稳的冷空气。在这类系统中,空气通过过滤器流动,从而获得清洁的空气。清洁的空气至关重要,建模和仿真有助于深入理解空气通过过滤器时的行为背后的物理原理。
模拟空气过滤器
暖通空调系统中的过滤器依靠一种材料,通常是玻璃纤维或棉叠片来过滤空气并捕获灰尘、花粉和细菌等微粒。这些材料会对气流产生影响,在捕获不需要的微粒的同时使过滤后的空气流过。对这些装置及其引起的湍流进行模拟,可以确定使用不同的材料作为过滤器时的效果,帮助设计人员在投资实际实验之前缩小材料选择范围。
在这篇博客中,我们将以常见的空气过滤器几何结构(如下图所示)为例来阐述。
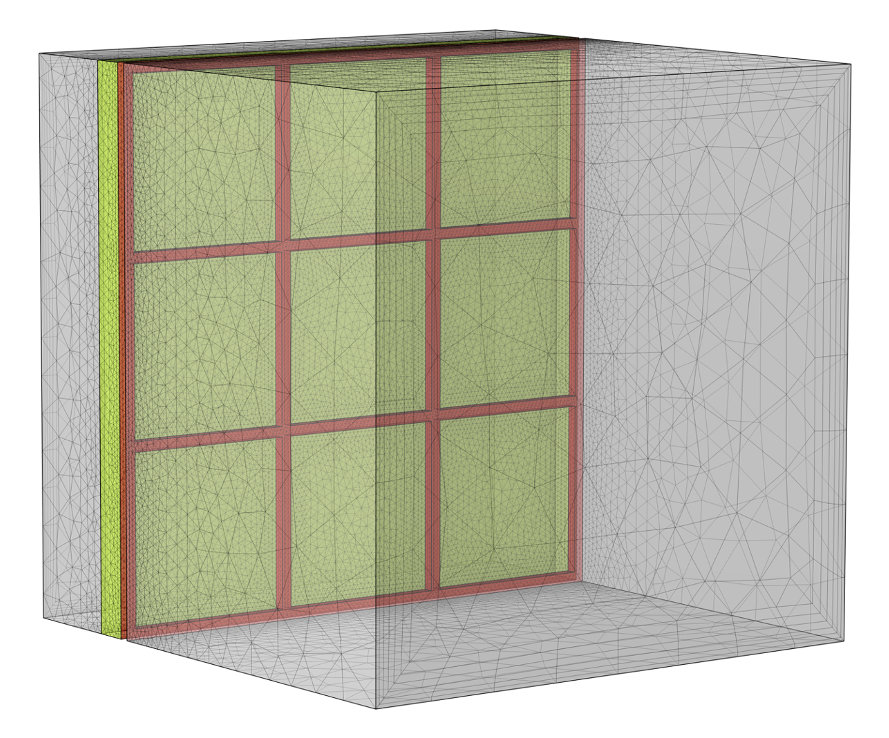
模型几何结构显示了入口和较长的出口,以及二者中间的过滤器。过滤器几何结构的网格比开放流体域的网格划分更加密集。
CFD 模块是 COMSOL Multiphysics® 软件的附加产品之一,它提供在开放域和多孔域中创建雷诺平均纳维-斯托克斯(RANS)湍流模型的功能。在本文的示例中,空气过滤器被模拟为一个高多孔域,其 90% 的材料充满了直径为 0.1mm 的圆柱形小孔。空气过滤器的支架由一个无滑移壁的框架表示。在此示例中,我们采用了 湍流 k-ω 接口,因为该接口对于包括无滑移壁在内的多壁模型计算非常精确。(有关模型设置的详细介绍,请参阅模型文档,您可以通过文末的按钮访问该文档)。
评估结果
通过求解模型,可以直观地看到空气向过滤器移动、通过过滤器以及通过过滤器时湍流、速度和压力的变化。从空气向过滤器移动(下图中为紫色)时开始计算。当空气通过过滤器时,间隙速度增加(尽管多孔平均速度保持不变),从而导致湍流动能增加。此外,由于速度增加以及壁面数量较多,导致摩擦和压力损失增加,压力突然下降。当空气离开过滤器时,由于过滤器的框架阻止了空气的自由流动,因此造成了下游的空气湍流。
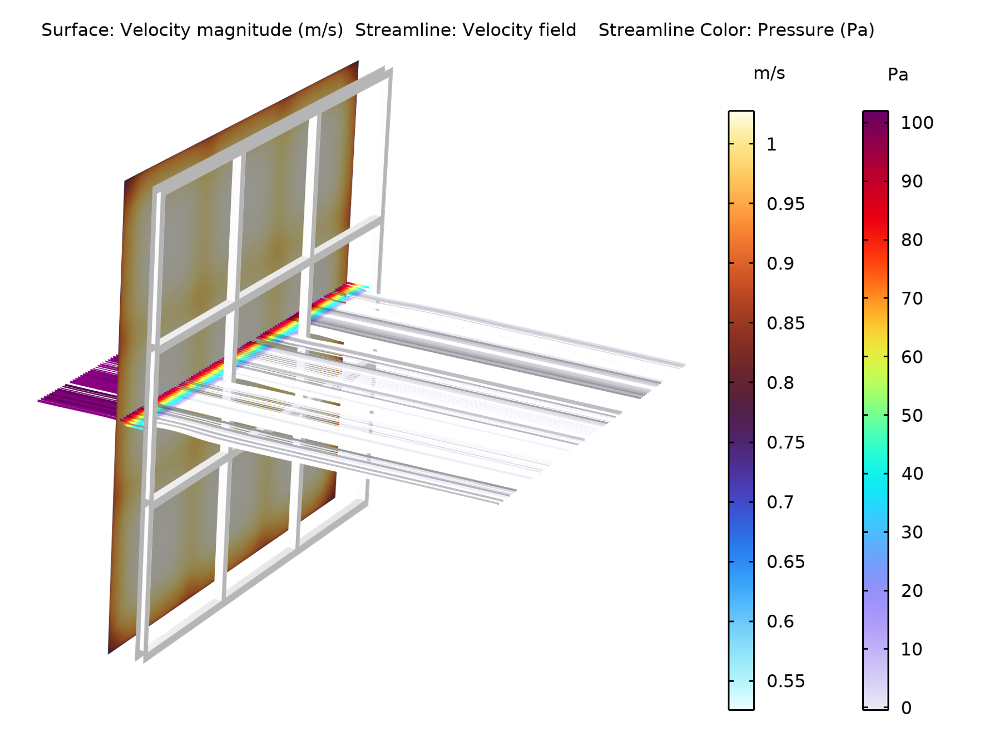
通过多孔空气过滤器的流体压力明显降低。
空气通过过滤器时的可视化效果可以用来判断过滤器是否能去除空气中的污染物。为了验证这一结论,我们可以用不同的切片图来评估解。本例中的切片图显示,多孔空气过滤器和框架对空气流速的影响最大,空气流速在通过尾流区时趋于均匀。测量湍流动能的切片图显示,湍流动能在过滤器内明显达到峰值,在无滑移壁上达到典型值。
总的来说,该模型表明过滤器内的压力下降,湍流急剧增加,造成垂直于主要流动方向的速度扰动,从而也增加了颗粒与孔壁碰撞并停留在孔壁的概率。换句话说,湍流增加提供了过滤不需要的微粒所需的混合,否则这些微粒将不受干扰地流过孔隙。
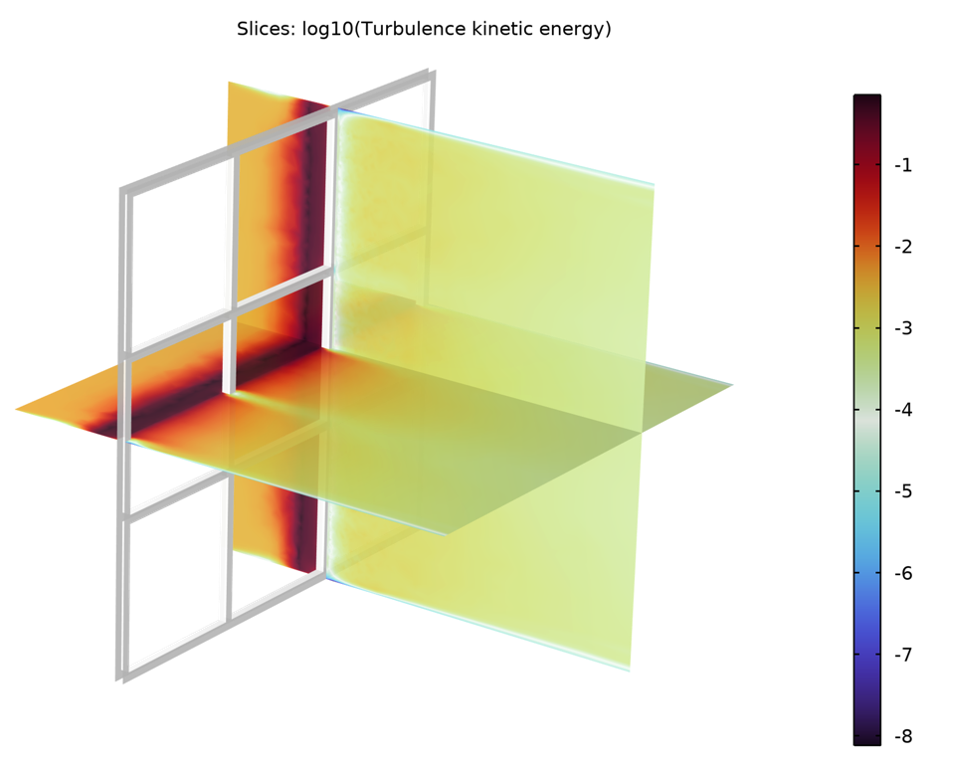
显示湍流动能的切片图。多孔空气过滤器中的湍流水平明显高于自由流或管壁附近。
动手尝试
想自己动手创建文中示例的空气滤清器的模型吗?COMSOL 案例库中提供了相关的 MPH 文件和详细分步说明,点击下方按钮获取案例模型:
扩展阅读
在这篇博客中,我们重点讨论了空气过滤器中的湍流。实际上,湍流模型也可用于描述室内气候、通风和空调系统。阅读下列 COMSOL 博客,探索更多涉及湍流的仿真方案In
仿真是运行实验的一个方便的手段,因为你可以相对快速和经济地运行大量测试,进而减少风洞试验的次数。为了让你相信跨音速流的仿真结果,我们基于著名的 ONERA-M6 机翼创建了一个验证模型。
使用 COMSOL Multiphysics® 模拟跨音速流
当你将 CFD 模块添加到 COMSOL® 多物理场仿真平台后,就可以访问专门用于模拟流体流动的功能,包括各种预定义的物理场接口。广义上讲,物理场接口定义了方程、分析、网格、研究和求解器,以及适用于特定工程领域或物理现象的结果评估和可视化功能。你始终可以访问 COMSOL Multiphysics 平台包含的基本物理场接口,并且可以通过添加与你的工作相关的模块,例如这个例子中的 CFD 模块来扩展可用的接口列表。

COMSOL Multiphysics 用户界面与正在使用的 CFD 模块中的高马赫数流接口。图形窗口显示求解 ONERA-M6 机翼模型后的结果。
如果你要使用 COMSOL Multiphysics 对机翼上的跨音速流进行建模,需要添加 CFD 模块并使用高马赫数流 接口,最好使用 Spalart-Allmaras 湍流模型,这是一个为空气动力学开发的单方程模型。请注意,我们不会在这里介绍如何设置模型的详细信息,但欢迎你从 COMSOL 案例下载页面下载 MPH 文件和相关说明。
关于 ONERA-M6 机翼模型
ONERA-M6 机翼最初创建于 1970 年代,用于验证涉及跨音速和高雷诺数的(3D)流动计算机模型。通过将我们的模拟结果与 ONERA-M6 实验数据进行比较,我们可以验证 COMSOL 模型是否准确。我们的验证模型基于 NASA 兰利研究中心提供的机翼 CAD 几何结构,我们使用 CAD 导入模块将它导入到 COMSOL Multiphysics 中。(顺便说一下,如果你以前没有看过原始机翼设置的照片,可以在 ONERA 网站上查看。)
结果和验证
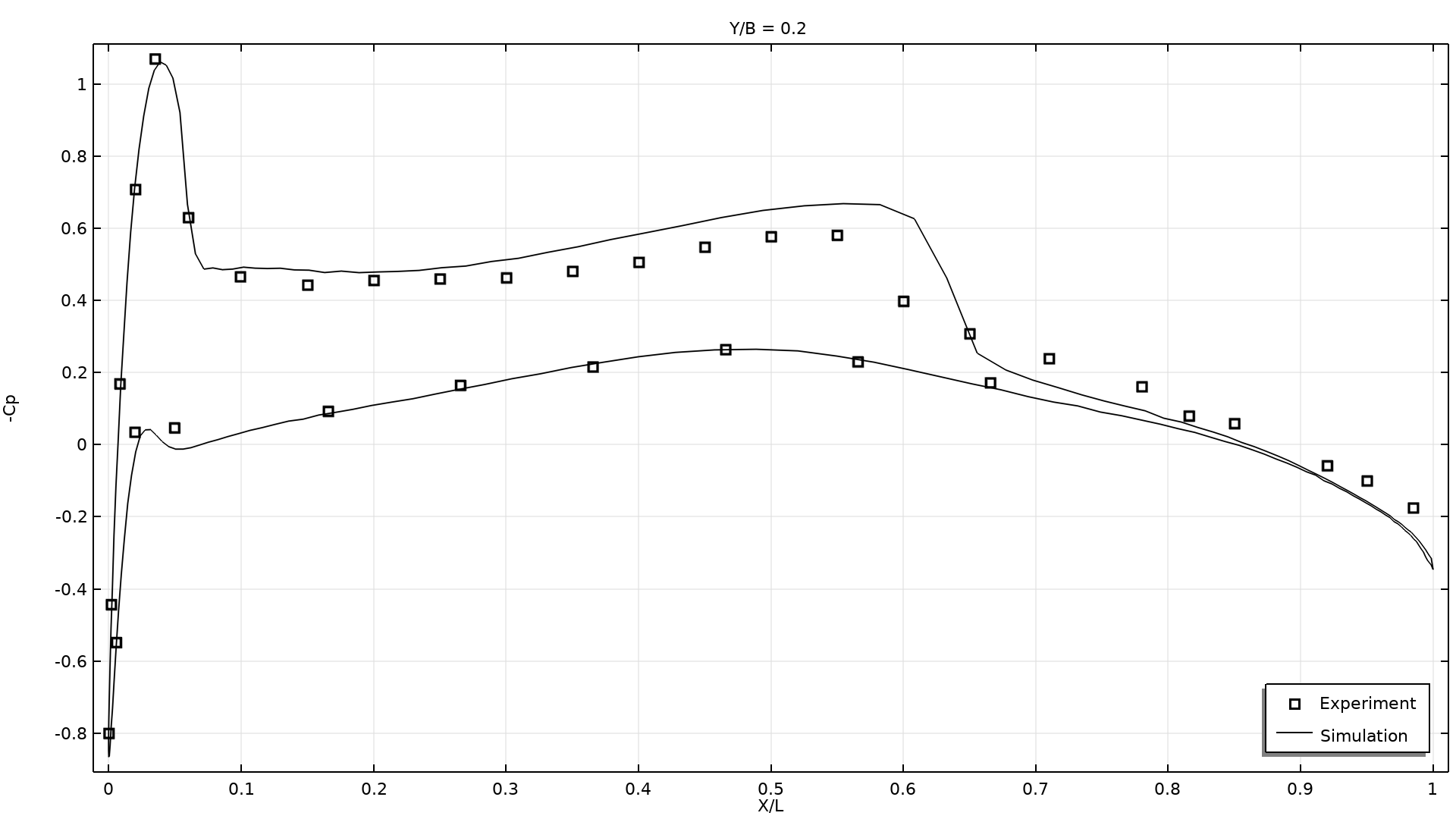
运行并求解模型后,我们可以使用表面图和轮廓图可视化机翼上的马赫数和压力分布。结果显示机翼表面存在两个弱激波:

这个结果与 ONERA-M6 机翼的实验结果相比如何呢?通过绘制仿真结果和风洞试验的结果,我们看到二者之间存在良好的一致性。简单来说,这个模型准确地描绘了激波的位置和压力系数曲线跳跃的大小。你可以浏览二者结果的比较图:
 仿真与实验结果对比(1/8)
仿真与实验结果对比(1/8)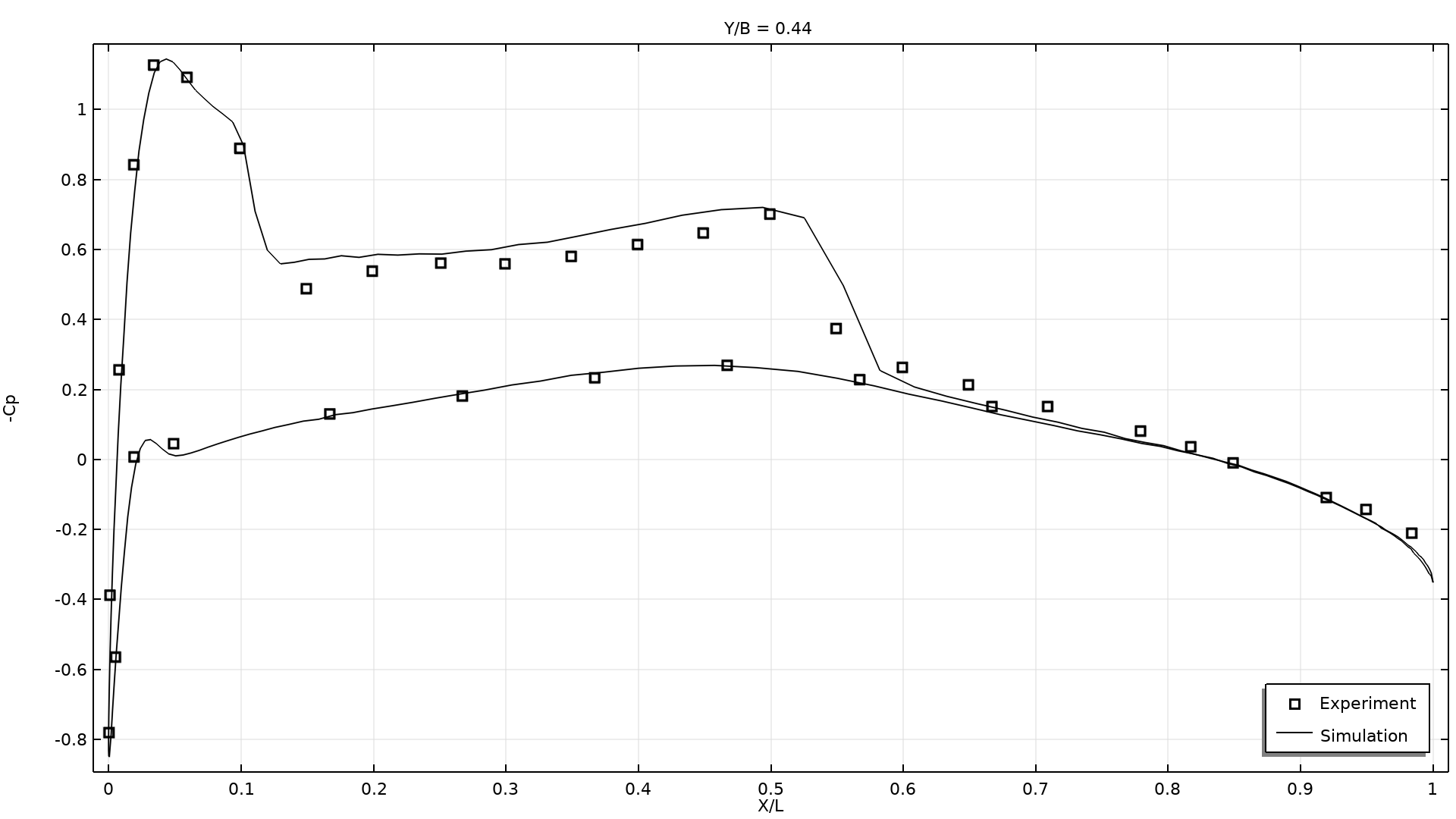 仿真与实验结果对比(2/8)
仿真与实验结果对比(2/8)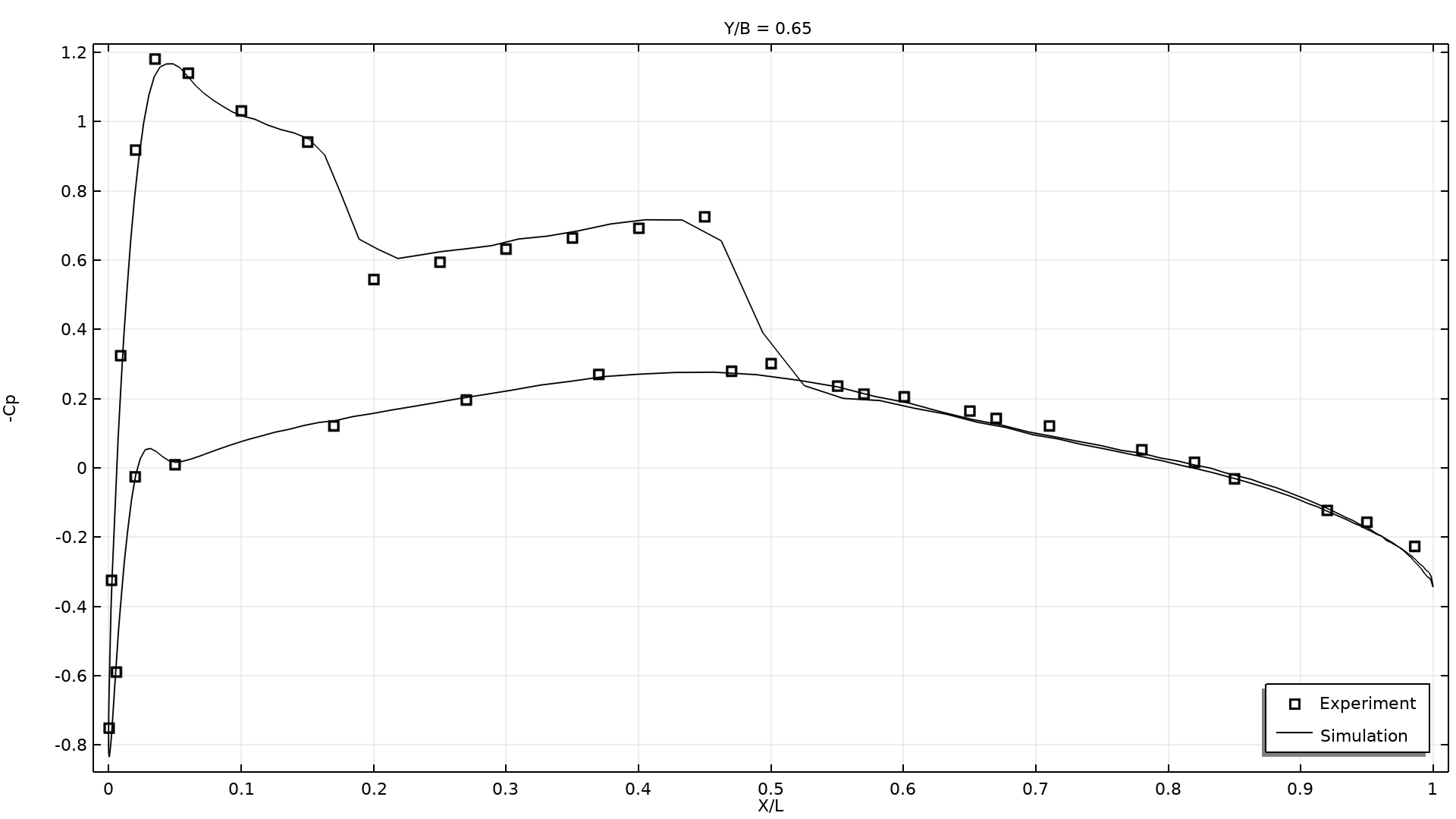 仿真与实验结果对比(3/8)
仿真与实验结果对比(3/8)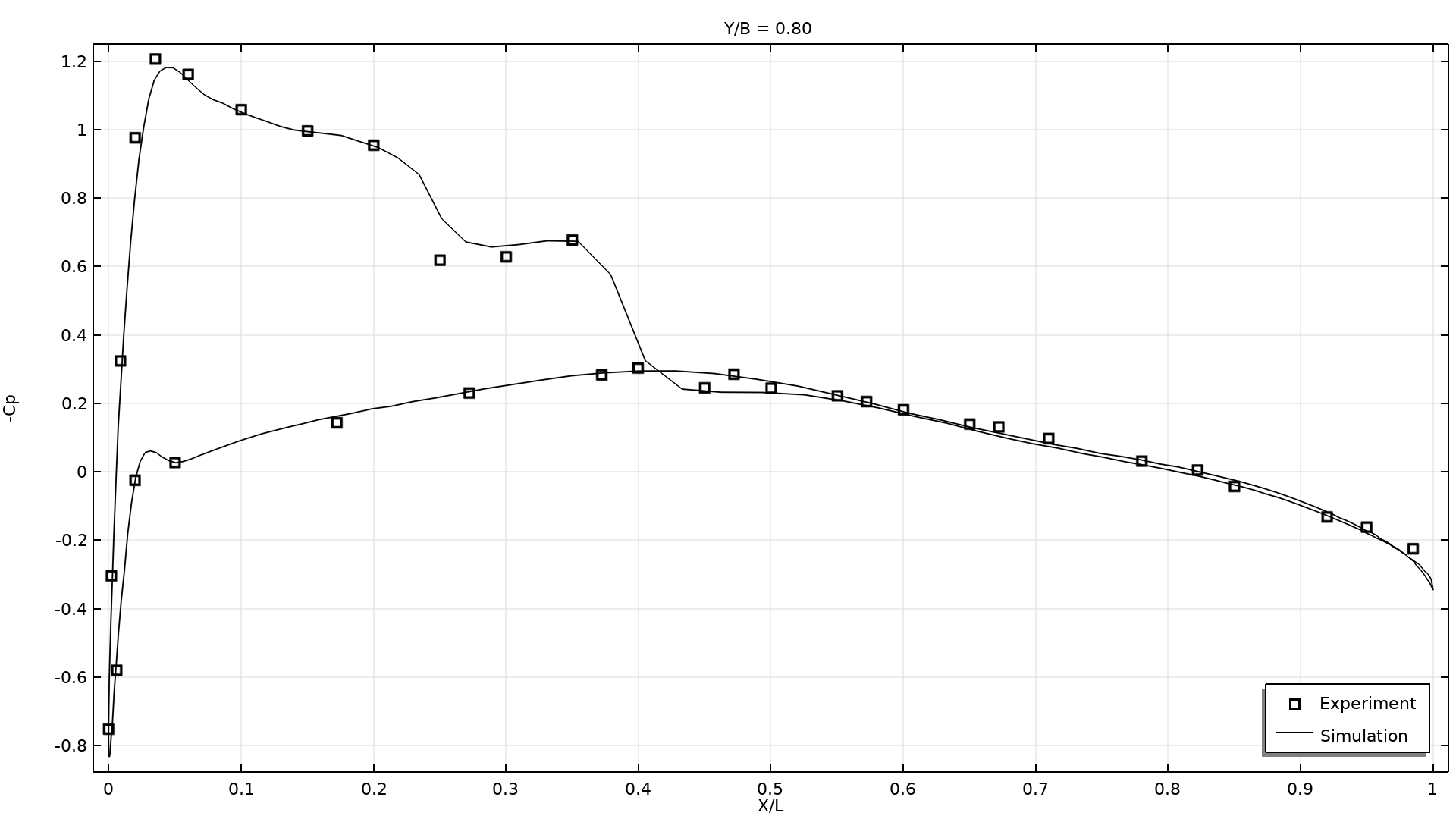 仿真与实验结果对比(4/8)
仿真与实验结果对比(4/8)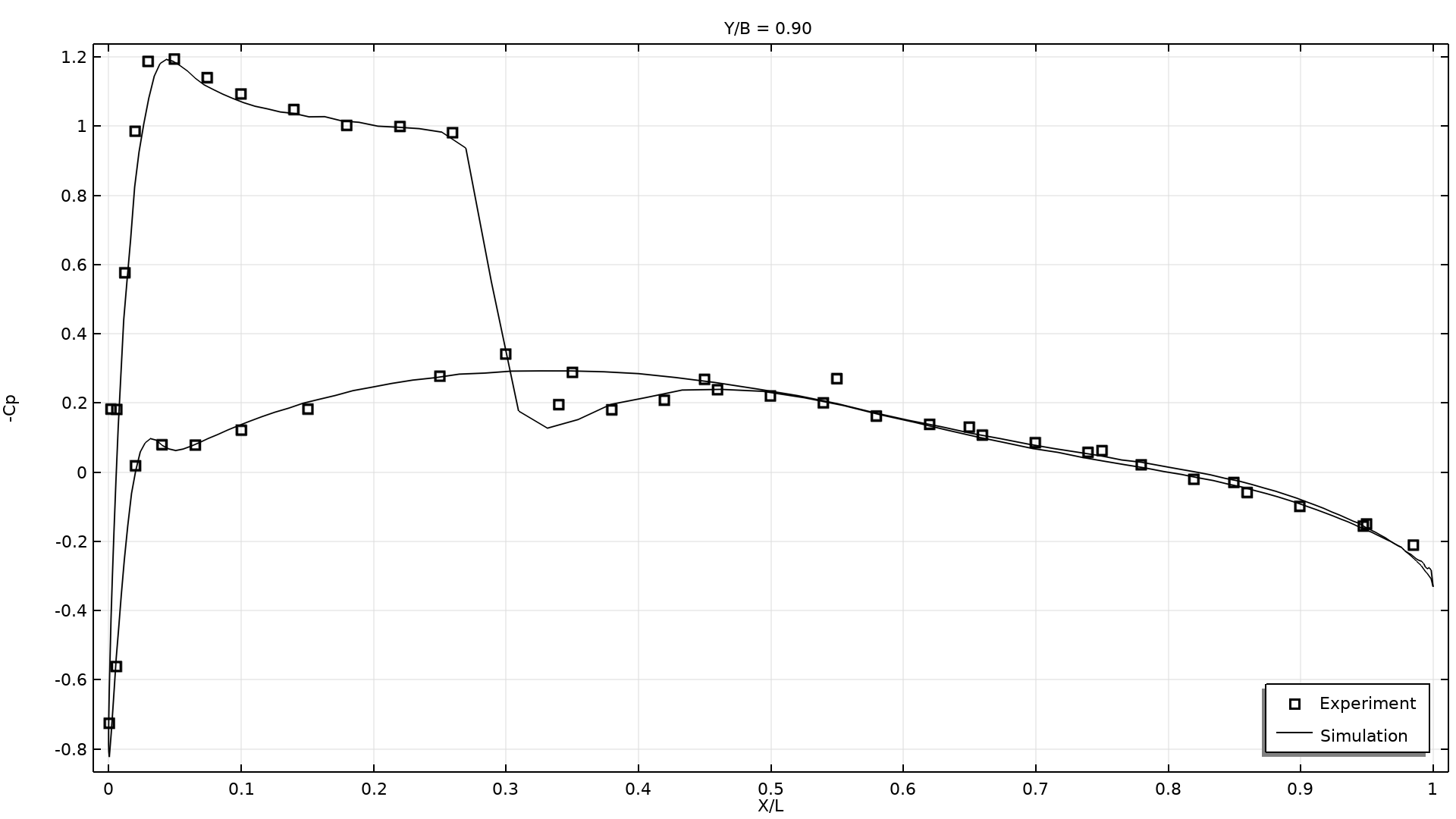 仿真与实验结果对比(5/8)
仿真与实验结果对比(5/8)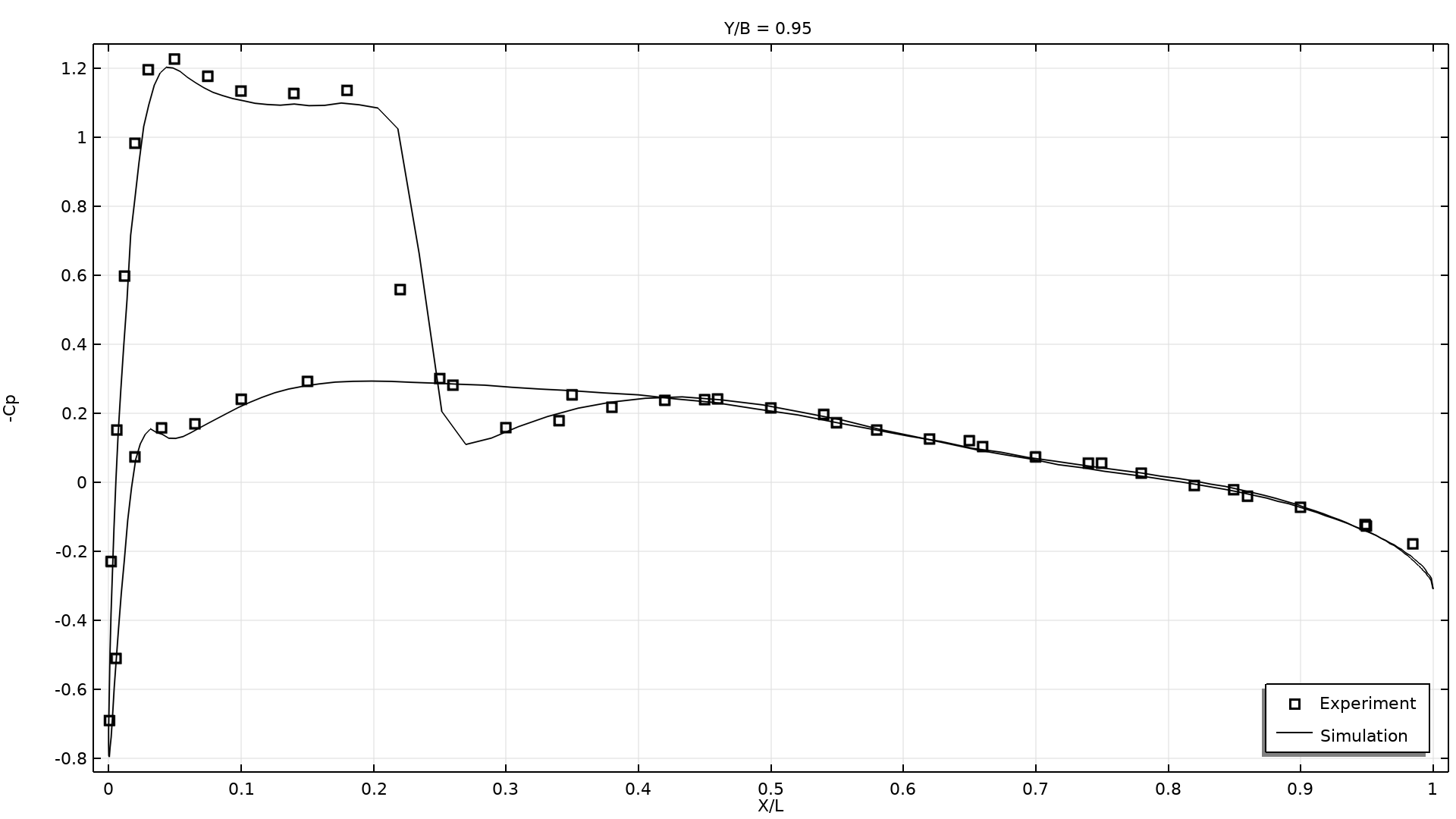 仿真与实验结果对比(6/8)
仿真与实验结果对比(6/8)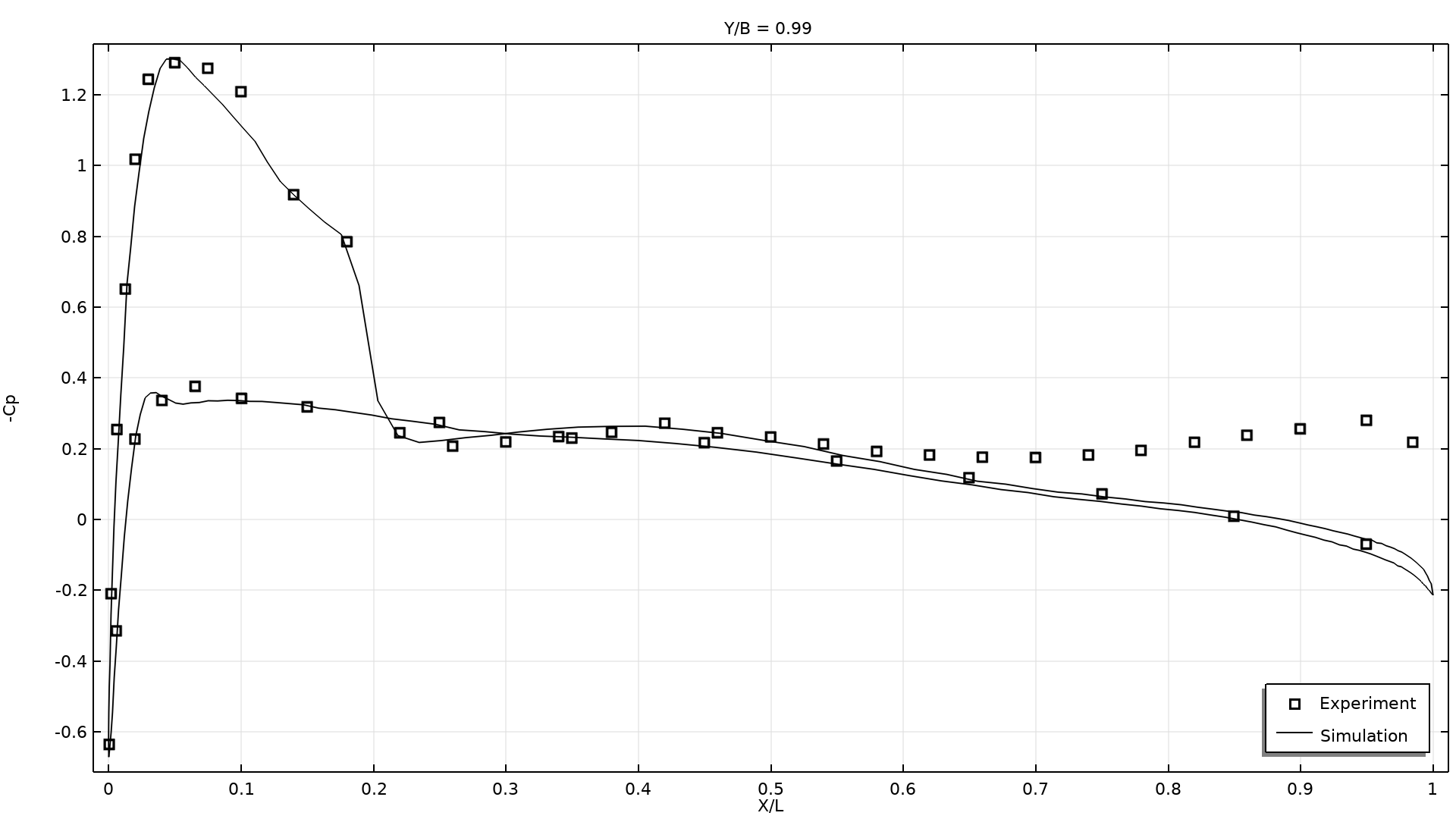 仿真与实验结果对比(7/8)
仿真与实验结果对比(7/8)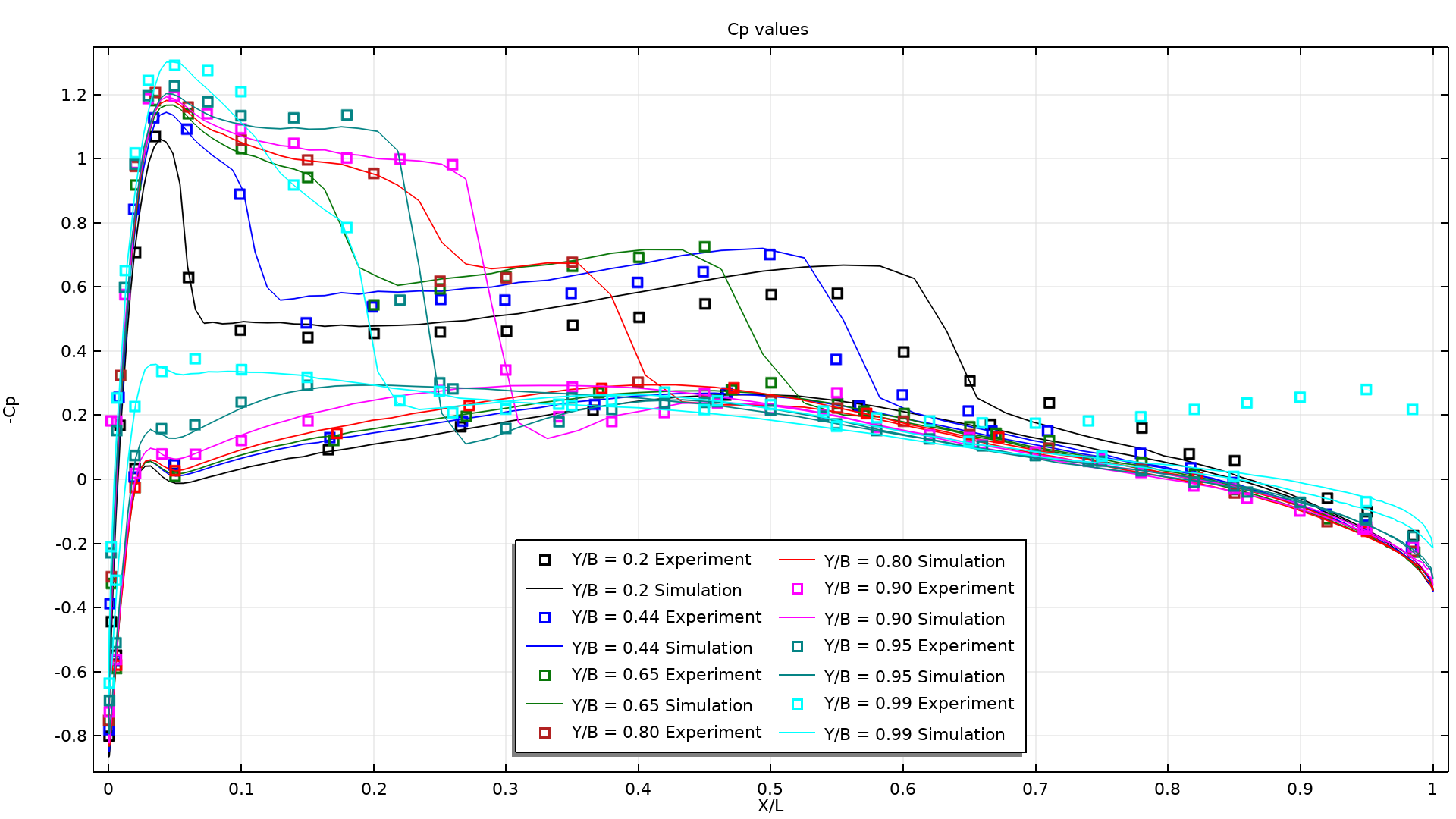 仿真与实验结果对比(8/8)
仿真与实验结果对比(8/8)
自己动手尝试
准备好带着模型进行试飞了吗?文中介绍的所有模型文件(包括分步说明)均可从 COMSOL Multiphysics 6.1 版本的案例库中下载。
ONERA-M6 模型只是可供下载的众多验证和确认模型之一。如需你想要了解更多信息,请访问 博客文章“现已推出:验证和确认 COMSOL 软件的模型集”的,访问完整模型集。
这个模型使用来自 ONERA-M6 机翼的数据作为参考。这个模型不属于 ONERA,没有获得 ONERA 的认可或赞助。
计算流体动力学(CFD)建模是对心血管应用和设备中的流体流动进行建模的一种有效方法,已被广泛用于模拟血液接触医疗设备中的血流动力学。使用 CFD 建模代替物理测试方法进行虚拟测试,使设备开发人员能够加快开发周期、降低成本,以及验证设备的安全性和有效性,让患者不需要接触没有经过验证的医疗设备原型。
由于这些优点,美国食品和药物管理局(FDA)经常建议行业使用建模和仿真来预测临床结果、为临床试验设计提供信息并支持有效性证据(参考文献 1)。为了改进 CFD 建模在心血管设备监督意见书中的使用并使其标准,FDA 开发了模拟喷嘴和离心血泵中流体流动的两个基准模型。为了验证 CFD 模型,他们在多个实验室进行了 体外 实验,以获得实验速度、压力和溶血数据。喷嘴基准的 CFD 建模预先由 COMSOL 认证咨询公司 Veryst Engineering 完成。
在这篇博文中,我们展示了使用 COMSOL® 软件模拟的离心血泵模型。
离心血泵模型
我们从美国国家癌症研究所的网站上获得了泵的几何形状,并根据 FDA 提供的规范为在 COMSOL® 软件中进行 CFD 建模做准备。我们使用 COMSOL® 软件中的 CFD 模块和搅拌器模块来运行冻结转子研究,该研究需要将流体域划分为静止子域和旋转子域。研究中尽可能保持最小的几何清理和修改。
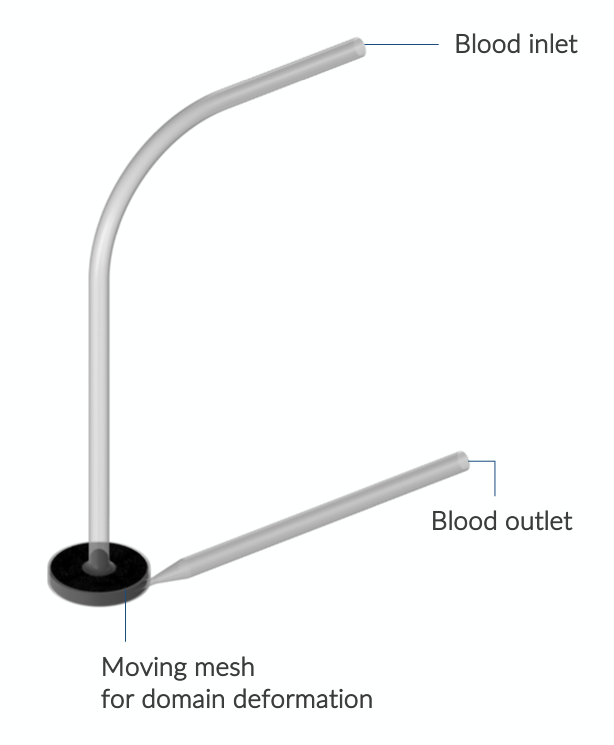
离心血泵的模型定义。
根据 FDA 指南,使用牛顿流体来描述血液。先求解 k-epsilon 湍流模型获得良好的初始流体流动解,并将其代入剪切应力输送 SST 模型,再求解 SST 模型获取具有更高保真度的流动解。在 3500 r/min 泵速,2.5–7 l/min 流速条件下进行了模拟。
进行冷冻转子研究来计算(伪)稳态解。
验证
FDA 于 2017 年发布了基准离心血泵研究,报告了计算研究的结果以及 体外 实验的数据(参考文献 2)。我们从出版物中的图表中提取了实验数据,并将这些数据与我们的 CFD 模型的结果进行了比较,用于验证 CFD 建模结果。
在 3500 r/min 的泵速下,计算了几种不同流速的泵的压头。计算结果与物理测量值非常吻合,如下图所示。

图表显示了在 3500 r/min 下运行的离心泵在几种不同流速下的压头计算结果。
在 6 l/min 和 3500 r/min 的泵条件下,计算了上叶片平面的二维速度大小。计算出的径向速度大小与测量值基本吻合,并且与其他 CFD 的研究报告一致(参考文献 2,图 6A、C )。
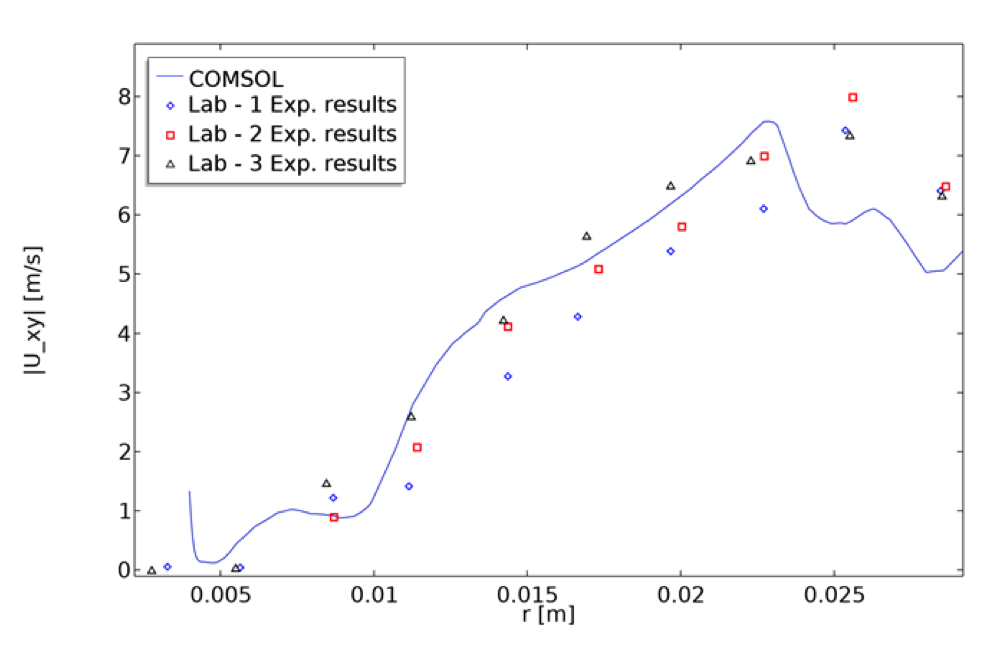
图中显示了基于沿径向切线的 x 和 y 速度分量的血泵模型内部的速度大小。该图还显示了该模型的结果与 Malinauskas 等人(参考文献 2)的实验结果的比较。
同样,在扩散器区域的 x = 0.035 m 处, 6 l/min 和 3500 r/min 的泵条件下,计算了速度曲线。计算出的速度大小与测量结果基本吻合,并与其他 CFD 研究报告一致(参考文献 2 的图6B、D)。
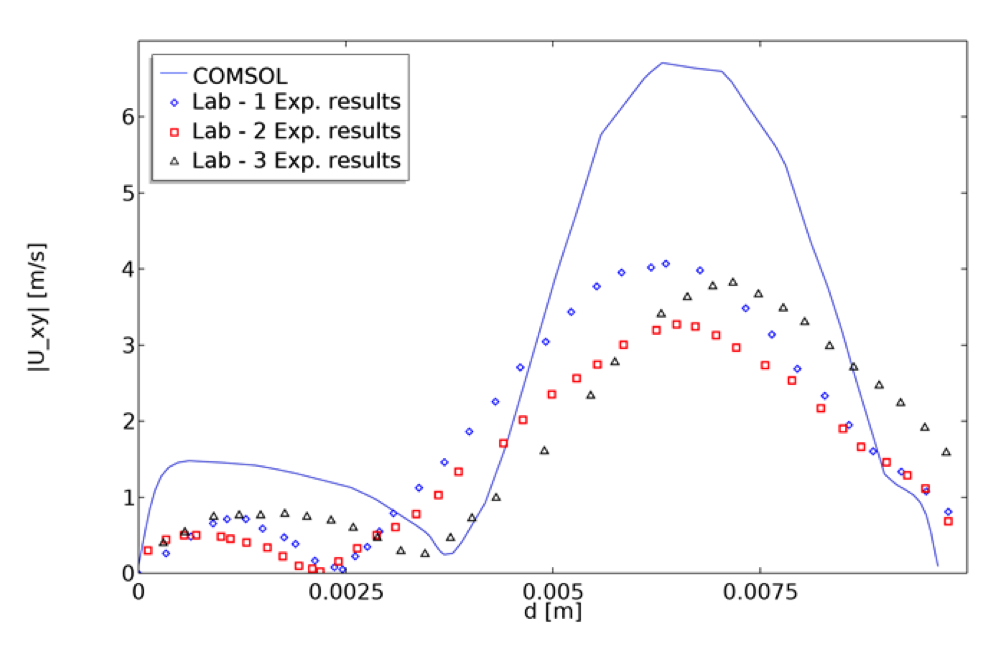
图表显示了基于扩散器切线 的 x 和 y 速度分量血泵内部的速度大小。该图还显示了模型结果与 Malinauskas 等人(参考文献 2)的实验结果的比较。
该模型文件演示了 COMSOL Multiphysics 如何使后处理变得简单。用户可以设置探针和非局部耦合算子(例如,平均值、表面积分等),由计算 CFD 的结果中计算出衍生值。使用各种类型的截取操作从 CFD 数据集中提取数据子集也非常方便。
最后,我们绘制了 6 l/min 和 3500 r/min 泵条件下,上叶片通道平面的三维速度大小的插值轮廓。结果与参考文献 2 中报告的其他 CFD 研究基本上是一致的。
使用 变换三维数据集得到的旋转和速度切片的可视化结果。
验证和确认
在医疗设备评估中接受建模和仿真需要充分的验证、确认和不确定性量化(VVUQ)。ASME V&V 40 标准(参考文献 3)于 2018 年发布,为评估医疗设备计算模型的可信度提供了一个框架,并考虑到了设备的风险因素。模型风险评估的关键概念是使用环境(COU)。在 V&V 40 推荐的框架中,“模型风险是计算模型相对于其他帮助决策的证据的影响,以及如果决策不正确对患者或终端用户的影响的综合考量。”换句话说,可信度应该与依赖计算模型作为证据的程度相当。对于像血泵这样的左心室辅助设备(LVAD)来说,一个不正确的可信度决定会对病人造成损伤。因此,相关的决策结果被评为“高”(参考文献 3)。
V&V 的一个重要方面是代码验证。COMSOL 验证和确认模型网页提供了 140 多个可供下载的验证和确认案例。在流体流动领域,COMSOL 模型已通过解析解以及求解相同方程的科学出版物进行了验证,并使用广泛接受的实验数据进行了验证。
我们还在 COMSOL Multiphysics 6.0 版中发布了不确定性量化模块。目标是为 COMSOL 用户提供一个可与 COMSOL Multiphysics 模型轻松集成的 UQ 工具。在生物医学应用中,实际模型参数通常不能确定指导。变异性也是生物体固有的。我们希望这对研究兴趣量如何依赖于模型输入变量的医疗设备建模人员有所帮助。
结论
CFD 可以有效地表征医疗设备中的流体流动。在这篇博文中,我们展示了使用 CFD 模块和搅拌器模块模拟的 FDA 血泵基准模型的 CFD 解。这两个模块为旋转机械中的流体流动提供了有效的 CFD 解决方案,这在离心血泵中很常见。模拟结果与 FDA 报告的实验和计算研究一致。
自己尝试
我们通过 FDA 血泵模型向您展示了 COMSOL Multiphysics 如何简化后处理。单击下面的按钮进入 COMSOL “案例库”,尝试自己动手模拟。
对其他生物医学应用仿真感兴趣?
如果您对其他生物医学应用仿真感兴趣,可以查看以下相关资源,了解 COMSOL Multiphysics 如何用于模拟各种生物医学应用:
参考文献
- T. Morrison, “How Simulation Can Transform Regulatory Pathways”, U.S. Food & Drug Administration, 9 Aug. 2018; https://www.fda.gov/science-research/about-science-research-fda/how-simulation-can-transform-regulatory-pathways
- R. A. Malinauskas, P. Hariharan, S. W. Day, L. H. Herbertson, M. Buesen, U. Steinseifer and B. A. Craven, “FDA benchmark medical device flow models for CFD validation”, Asaio Journal, 63(2), 150–160, 2017; https://pubmed.ncbi.nlm.nih.gov/28114192/
- ASME, “Assessing Credibility of Computational Modeling through Verification and Validation: Application to Medical Devices”, 2018; https://www.asme.org/codes-standards/find-codes-standards/v-v-40-assessing-credibility-computational-modeling-verification-validation-application-medical-devices
流体流动计算仿真中存在的一个问题是实验相关问题。尽管我们在 COMSOL 中可以很容易地生成漂亮的三维可视化数值结果,但将这些结果与实验结果进行比较通常比较困难。纹影成像是一种实验技术,它可以生成一组含三维流场的二维图片。事实上,在 COMSOL Multiphysics® 软件中也可以很容易地创建这种成像图。下面,我们来了解更多详细内容。
纹影成像的背景
纹影成像技术的历史可以追溯到很远,甚至可能早于书籍记载。古代穿越沙漠和海洋的旅行者们都非常熟悉海市蜃楼的原理,例如海市蜃楼和 颠倒的帆船等物体的遥远幻影(这可能是导致Flying Dutchman这类寓言产生的原因)。发生这些现象是因为光线在穿过不同密度的空气时会轻微弯曲。这种原理可能在1000 年前就以某种形式被人们所理解,但直到最近 500 年左右,人类才开发出这种实验技术。
虽然纹影成像方法有很多变化,但基本操作原理非常简单。流体(或固体)内的任何温度或压力变化都会导致密度局部变化,而密度会影响折射率。对于大气,折射率  与密度
与密度  满足 Gladstone-Dale 关系:
满足 Gladstone-Dale 关系:
对于可见光, 约为 0.23 cm3/g。
约为 0.23 cm3/g。
需要注意的是,上面的表达式只是一个简单的起点,我们可以使用更完整的表达式,对于气体混合物和反应流,还有更复杂的表达式。开发纹影成像实验方法的目的是捕捉到流体中这些密度变化的气流中光学图像。
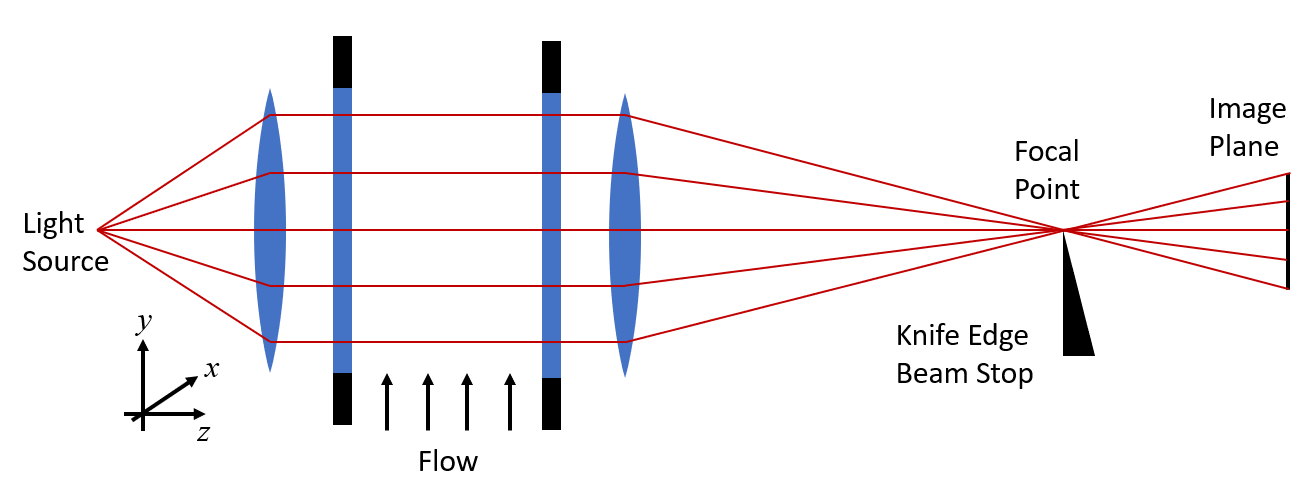
纹影成像设置。
典型的纹影成像实验装置如上图所示。此装置有两个透明的窗口,例如围绕风洞的两侧有一个流场。我们首先假设流场没有变化。在一侧有一个光源,以及一些提供均匀照明的光学元件(透镜或镜子)。通过几何光学方法,我们将这种光视为一组穿过流场的平行光,然后让它们通过另一组将光线聚焦到图像平面上的光学元件。
焦点处未受干扰的光线。用刀刃挡住一半的光,并忽略边缘处的衍射。
但是我们要知道,所谓的焦点不是一个单一的点。光不能被聚焦到一个点上;聚焦光束总会有一些有限的半径。你可以通过了解电磁波相关知识来理解这个内容。
但是,对于本文而言,我们只需要了解一个关键点,就是放置在焦点处的障碍物会遮挡一部分光。这已经足够保持这个几何光学方法了。如果我们在焦点处放置一个刀刃(实验上通常是剃须刀片),就可以阻挡全部光线的一半,但仍然可以获得完整的图像,尽管光强只有一半。为了便于理解,我们可以考虑将每条光线看作具有一定的有限厚度,如上图所示。
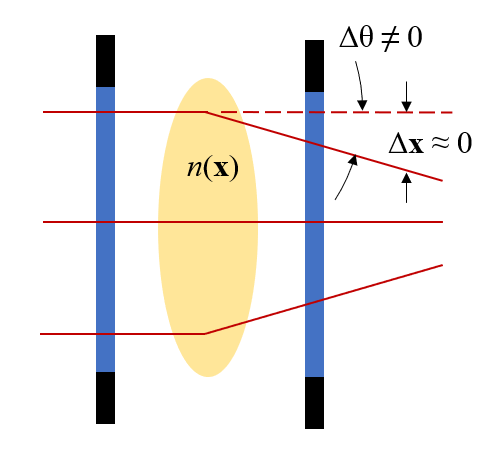
折射率略有变化的区域会稍微改变光线的方向,但不会改变它们在出射平面上的位置。
现在,我们来考虑当流动中存在密度变化时会发生什么。我们已经知道折射率是密度的函数,所以在示意图中引入一个小的折射率变化,看看会发生什么。上图显示了光线的关键行为。跳过整个推导,我们仅强调以下几点:
- xy 平面中折射率的变化将导致光束在沿 z 方向传播时非常轻微地改变方向(角度)
- 假设当光线通过实验域时,光线在 xy 平面中的位置变化可以忽略不计
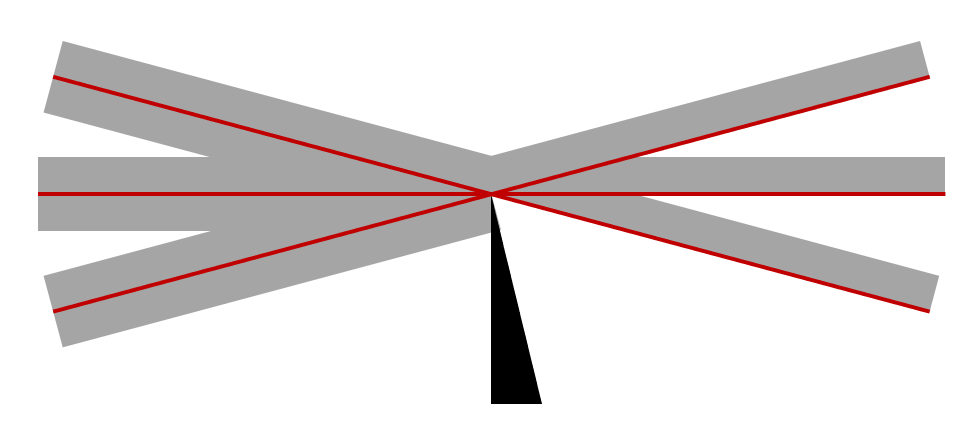
也就是说,在位置 (x,y) 进入域的任何光线都将离开其在xy平面中的原本位置,但会朝着稍微不同的方向前进。接下来,我们看这对焦点有什么影响。正如我们在下图中看到的那样,折射率的变化会稍微扰乱光线,因此稍微多一点(或稍微少一点)的光线会被刀刃遮挡。这在图像平面上显示为亮区和暗区,并形成基本操作原理。
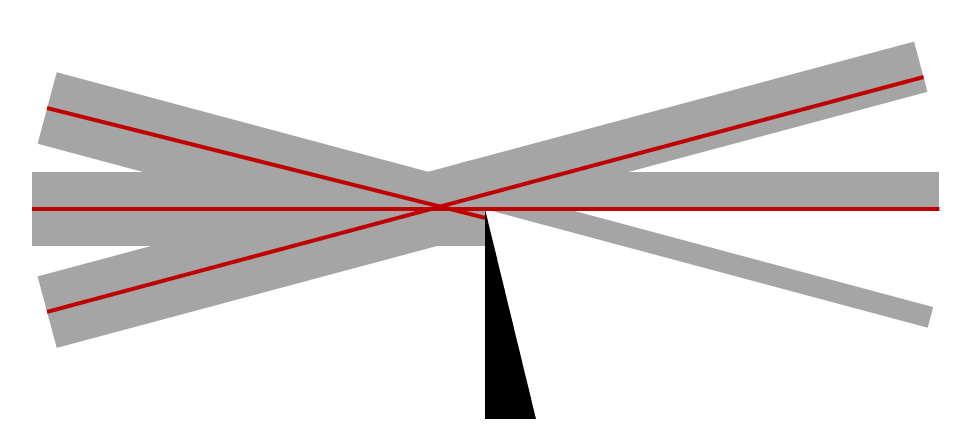
焦点处的扰动光线。对于以略微不同的角度入射的光线,刀刃阻挡的光量不同。
刀刃可以旋转到平行于 x 轴或 y 轴,或者可以被针孔光束挡板代替,每个挡板都会产生不同的明暗图案。纹影图像中的这些亮带和暗带对应于流动域中的以下积分:
| 障碍物类型 | 方程 |
|---|---|
| 平行于 x 轴的刀刃 |  |
| 平行于 y 轴的刀刃 |  |
| 针孔遮挡板 |  |
事实证明,这些积分在 COMSOL Multiphysics 中实现起来非常简单。
在 COMSOL® 软件中创建纹影图像
在创建图像之前,我们需要先介绍计算流体动力学的一个相关知识:如何处理可压缩流体 。简单来说,出于数值建模的原因,我们经常假设流体具有恒定的密度。从流动模型的角度来看,这是完全合理的。小于约 1% 的密度变化可能不会对速度场或压力场的解产生太大影响,但会显著改变折射率。因此,如果在假设密度不变的情况下对流动进行建模,例如使用布辛涅斯克近似时,请确保使用压力场(如果计算了温度场)对空间密度的变化进行后评估。对于大气空气,宜采用理想气体定律,但请确保这里使用的是绝对压力而不是表压。
一旦我们在建模空间中建立了密度变化的表达式,就可以用它来计算折射率分布以及折射率在一个或两个方向上的导数。为此,我们使用了内置的微分算子。例如,如果密度表达式是变量 rho,我们可以将 x 导数作为 d(rho,x)。我们现在只需要沿流动的方向对该表达式进行积分,并将它们绘制到平行于流动的平面上。为此,我们使用了广义投影算子,我们甚至可以投影到流动域之外的边界上,如果我们希望使用比存在于流动域边界上的网格更精细的网格来评估该算子,这将是非常有利的。
我们还需要考虑当流动中有不透明障碍物时会发生什么。在这种情况下,我们不想用上面的任何一个积分进行求解。我们可以使用从 COMSOL Multiphysics 6.0 版开始提供的CAD 导入模块、设计模块,或 LiveLink 产品中提供的工作平面 投影 功能,将任何障碍物的轮廓投影到光学出射平面边界上,并且只评估非阴影表面上的积分。
产品中提供的工作平面 投影 功能,将任何障碍物的轮廓投影到光学出射平面边界上,并且只评估非阴影表面上的积分。
使用 工作平面投影 功能,将几何图形的轮廓投影到平面上。
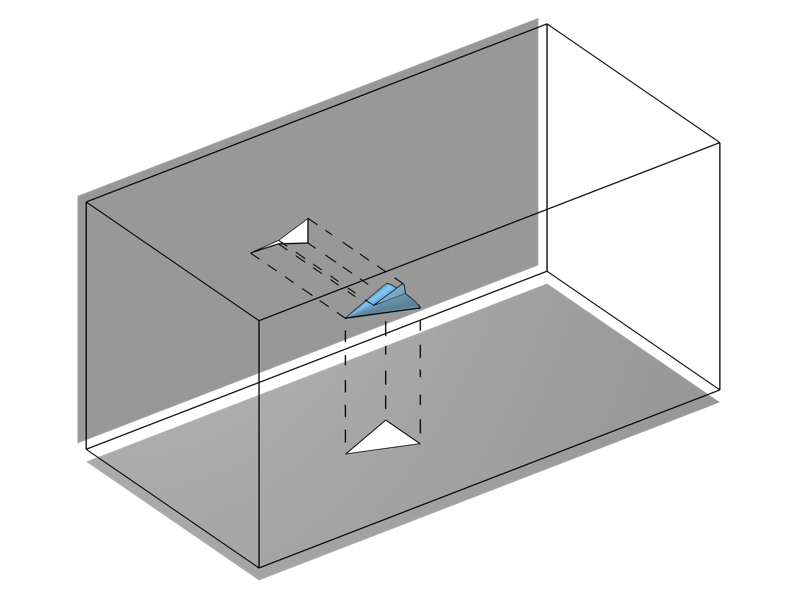
在我们的建模中使用这些技术,可以制作与纹影成像设置的实验结果相关的图。下图是围绕一个物体的高马赫数流模拟,这与 含凸起流道中的超音速三维教程模型中演示的类似。同样的技术也可以用于声学模型的结果可视化研究中。
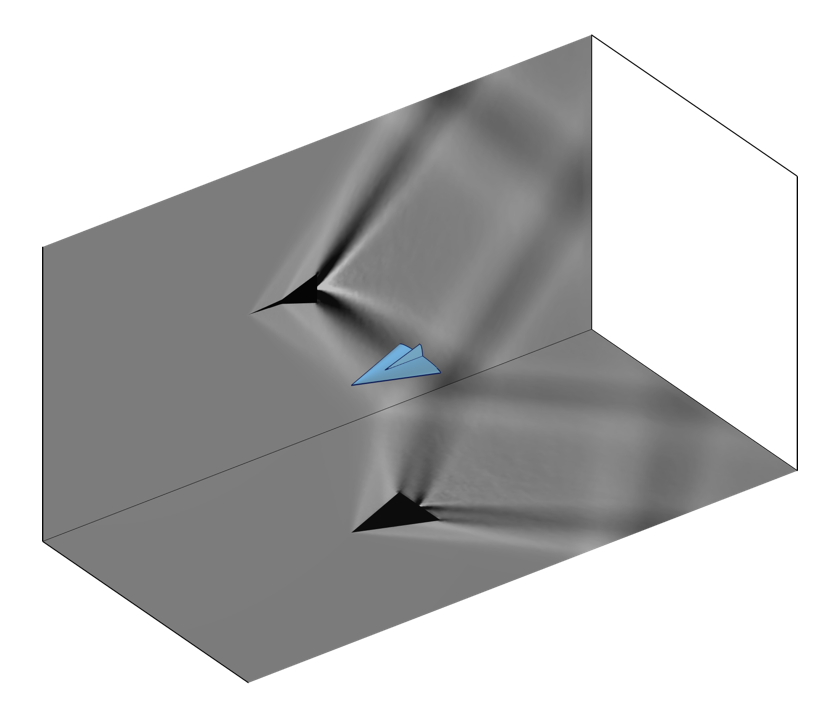
通过 广义投影 算子创建的与超音速风洞流道模型的纹影成像相关的图像。
下一步
想了解有关 COMSOL 软件中 CFD 建模功能的更多信息吗?请联系我们!
将谷物磨成面粉,加水加压揉成面团,然后再切块煮沸。意大利面看似是一种非常基本的厨房素材。然而,它的一些特点似乎激发了人们的创造力,而且不仅仅是发生在厨房里。你有没有听说过这样一个故事:马可波罗于 13 世纪在中国发现了意大利面并把它带到了意大利?这可能并不是真的,因为当时古罗马和希腊已经开始食用小麦制作的面食了(参考文献 1)。
我还听过一个值得怀疑的故事。小时候,我的一位小学老师告诉我们,意大利的妈妈们会从锅中取出一些正在煮的意大利面,将它们扔到墙上来看是否会掉落,来测试意大利面的成熟度。真的是这样吗? 在我9年的生命中,我从未见过我的意大利裔美国祖母扔过一根面条!
是什么让这种传闻如此 根深蒂固 呢?难道仅仅是因为意大利面和人一样,比表面上看起来更复杂吗?欢迎查阅我们的意大利面挤出 案例教程模型,了解意大利面制作的真实故事。
意大利面的流变学平衡行为
艺术与科学、面粉与水、橄榄油和大蒜,无论我们是生产面条还是把它们做成晚餐,我们都必须平衡互补元素之间的紧张关系。制作意大利面粉的谷物中含有淀粉和蛋白质。为了制作面团,我们在面粉中加水,然后用手或工具搅拌。这个过程中增加的水分和压力会将湿粉末变成黏且有弹性的圆球。
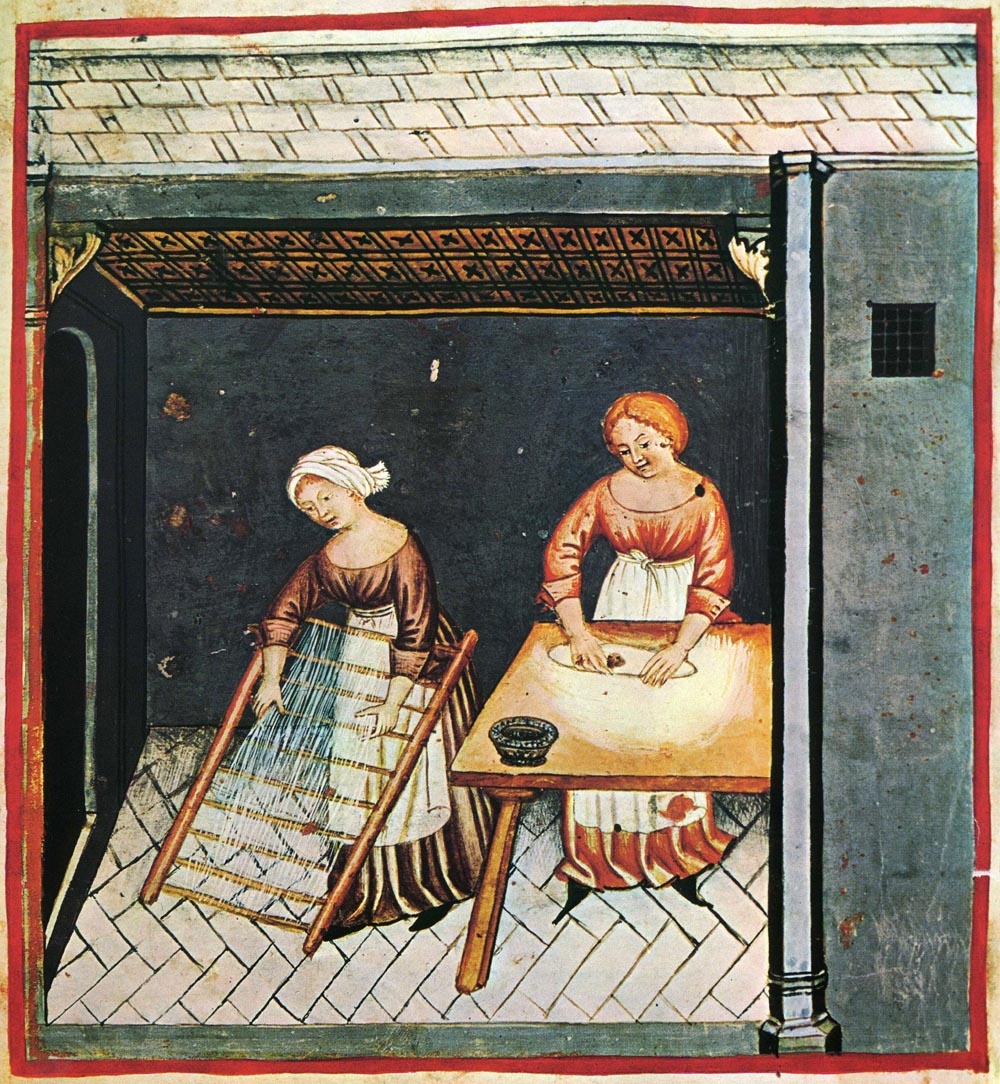

左图:15 世纪的意大利绘画中制作意大利面的妇女。图片来自 Wikimedia Commons在公共领域中的图像。右图:中国辽宁大连的一名男子正在制作拉面。照片由 CEphoto, Uwe Aranas 拍摄,通过 Wikimedia Commons 获得许可( CC BY-SA 4.0 )。
生意大利面面团可能看起来很均匀,但实际上,面团中的淀粉和蛋白质分子分布并不均匀。这些不同的分子可以帮助定义意大利面面团的 流变性,用于描述当施加水分、机械应力和热量后面团如何发生流动和变形。无论这个面团最终是被制作成 松饼 还是花卷意面,面团的流变性都会受每个生产阶段处理方式的影响。
挤出机如何将原料变成面条
当我们从和面开始制作意大利面时,可以根据面团的外观和手感对其进行调整:这里加一点水,那里揉一揉。当工业级别生产意大利面时,这种用手调整面团的流变性就不再适合了。面条厂通常使用机器(例如挤出机)来混合和揉搓生意大利面面团。下图显示了一个典型的面食挤出机设计示例:
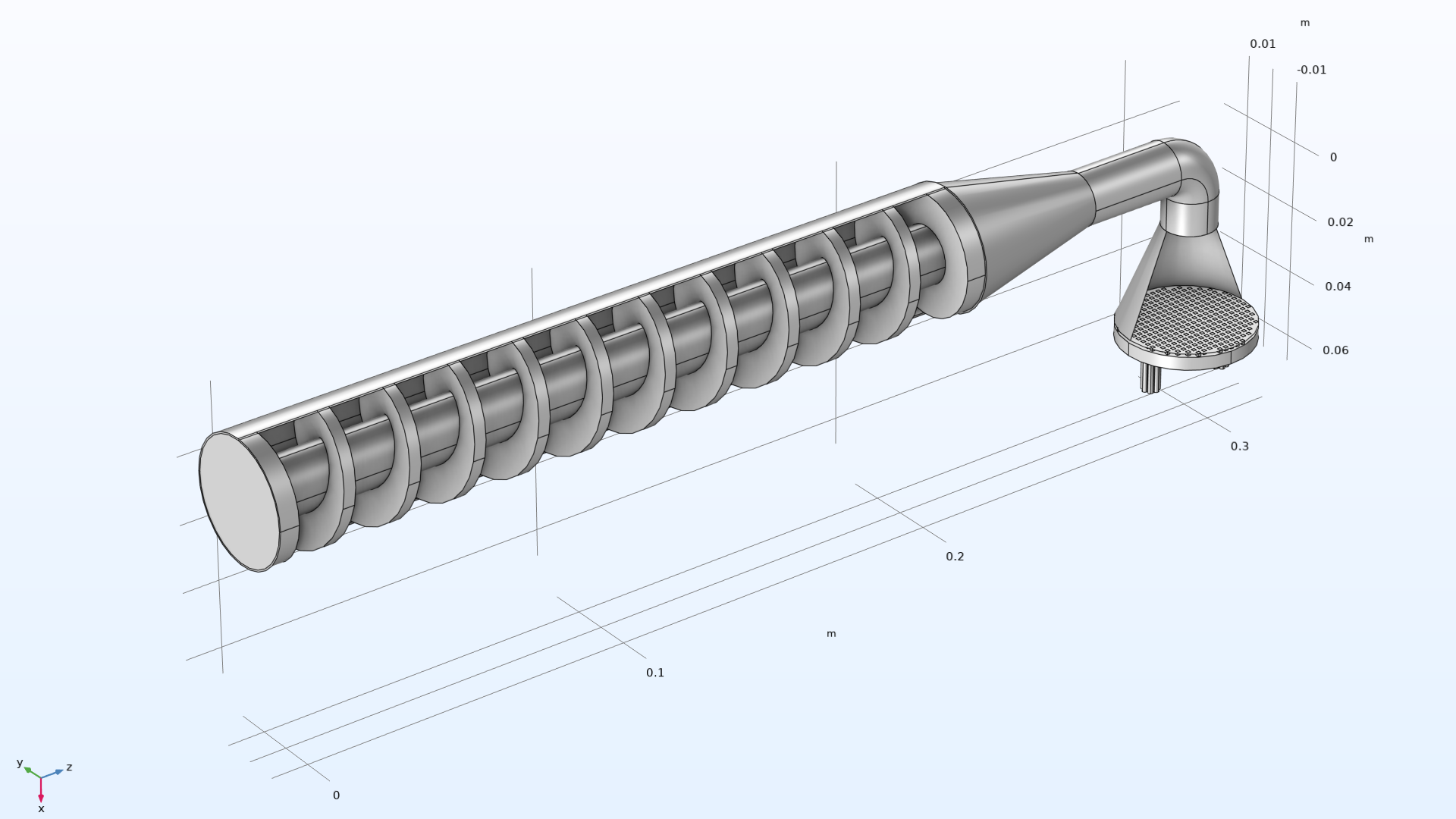
案例模型中的面食挤出机内的组件。
挤出机的核心是挤出螺杆或蜗杆,它是由一个螺旋状刀片和旋转轴组合而成。(它看起来像一个巨大的意大利螺旋 面!)水和面粉被送进如图中设计的挤出机的左侧。当挤压蜗杆转动时,配料会被用力推向右移动。蜗杆运动产生的热量、运动和压力将混合物转化为面团,在将面团被推入图中右侧机器出口喷嘴中的孔。各种配件被安装在出口处,用于制作各种形状的面条,并使用其他设备切割和干燥最终产品。
挤出工艺的潜在问题
尽管使用这种机器制作意大利面已经有数百年的历史了,但这项技术仍然存在问题。University of Naples的一项研究(参考文献2)指出,挤压过程涉及复杂的“由压力和温度共同驱动的聚合现象”。挤出机内部可能出现的问题包括:
- 面粉和水混合不充分
- 压力分布和挤出速度不均匀
- 面团循环不良,容易形成霉菌
这些问题会影响最终产品的外观和味道,甚至无法安全食用。为了帮助预测可能导致这类问题的条件,我们可以使用 COMSOL Multiphysics® 软件对意大利面挤压过程进行建模。
模拟热量和速度的不均匀分布
自 6.0 版本开始,COMSOL Multiphysics 案例库中新增了如何模拟面团通过面食挤出机时的非等温流动案例模型。该模型可用于预测挤出机内的条件如何影响最终产品。
由于机械搅拌产生的温度升高,面食面团的黏度会随着通过挤出机而降低。
注意:为简单起见,模型中假设水分含量为常数,此处不作说明。
非等温流动,层流 接口提供了蠕变 和流体传热 接口之间的耦合,使我们能够计算这种黏度耗散。挤出螺杆在旋转域内以 20 转/分的角速度运动。使用冻结转子分析可以对螺杆作用和产生的面团流场进行有效的近似,节省了内存和时间。
挤出机模型的模拟结果显示了热和剪切应力对面团的综合影响。在螺杆表面与外壁相遇的地方,剪切速率最大,黏性热最大。壁附近产生的热量以螺旋形路沿径向连续对流离开挤出机口模。由于面团的剪切变稀效应,黏度随着剪切速率的增加而降低。黏度也会随着温度升高而降低。这些不均匀分布的影响导致了近一个数量级的黏度变化。靠近刀片中间的部分面团,剪切速率低,几乎像刚体一样旋转。这些效应使得垂直于流动方向的混合非常差,从而导致面团质量不均匀。


意大利面挤出机模型内的模拟温度曲线(左)和表观黏度(右)。
此外,靠近出口处的面团温度不均匀。这些仿真结果表明,对挤出机进行隔热将使螺杆部分出口处的温度更加均匀,从而确保面团在到达喷嘴之前具有更加均匀的面团特性。


意大利面挤出机模型内的模拟速度曲线(左)和剪切速率(右)。
尝试自己动手
虽然我没法让你尝尝我祖母制作的意大利面,但可以提供文中提到的的意大利面挤出机仿真模型。请点击下方按钮,下载案例教程,尝试自己动手模拟 —— 但是,说了这么多有关意大利面的话,你是不是感觉有点饿了,先吃点意大利面再开始吧!
想了解更多与食品科学相关的内容吗?
请查阅下面这些有关食物仿真的博客:
参考文献
- S. Marchetti, “Chinese Noodles Not The Inspiration for Pasta, Historians Say, Its Roots Are in Ancient Greece — And They Have The Texts to Prove It”, South China Morning Post, 23 Apr. 2020; https://www.scmp.com/lifestyle/food-drink/article/3080891/chinese-noodles-not-inspiration-pasta-historians-say-its-roots
- F. Sarghinia, A. Romano, and P. Masi, “Experimental Analysis and Numerical Simulation of Pasta Dough Extrusion Process”, Journal of Food Engineering, vol. 176, pp. 56–70, May 2016; https://doi.org/10.1016/j.jfoodeng.2015.09.029
沉降是一种简单的物理现象,颗粒或团块由于重力或离心力在溶液中沉降。由于这种现象非常简单,因此广泛应用于毒理学、生物化学、生物医学、遗传学和制药工程等许多技术领域。在这篇博客中,我们将讨论一个关于重力如何影响试管中的沉降的数学模型,以及如何制作一个用于纳米毒理学的实用仿真 App (作为各种应用中的一个示例)。

提取的 DNA,其中的颗粒沉淀到试管底部。图片由 Isaevde 提供。通过Wikimedia Commons获得许可(CC BY-SA 4.0)。
沉降如何应用在生物化学领域
自 2020 年 3 月以来,COVID-19 大流行的传播以不同的方式影响着我们的生活。你可能在旅行或工作之前已经做过聚合酶链反应 (PCR) 测试,这是测试 COVID-19 最常用的技术之一。众所周知,Kary Mullis 和 Michael Smith 是 PCR 的发明者,并因此获得 1993 年诺贝尔奖。同样,COVID- 19 的大流行也需要 COVID-19 疫苗,希望它能够防止病毒传播。基于 mRNA 的 SARS-CoV-2 疫苗背后技术的主要贡献者 Drs.Drew Weissman 和 Katalin Karikó 被授予了 2021 年拉斯克奖,这是美国最高的生物医学研究奖。
在 COVID-19 大流行期间,我们几乎每天都会不自觉地听到和看到许多基因工程术语,例如病毒、疫苗、PCR 和 mRNA 等。这些术语都由生物分子组成,或与其相关。各种各样的生物分子都可以通过离心机的沉降系数来表征。这项研究的先驱是瑞典化学家 Theodor Svedberg,他因对分散系统的研究而获得 1926 年的诺贝尔奖。他的姓的首字母现在是沉降系数的单位名称(S,svedberg),表示粒子在一定力(重力或离心力)的作用下达到终速的速度。例如,完整的真核生物核糖体的沉降系数为 80 S。
虽然COVID-19 被认为是一种自然疾病,但也存在人为疾病,例如,由工厂、汽车和其他人为排放的材料和污染源引起的各种尺寸(从纳米到微米)的颗粒(通常是金属)造成的空气污染。毒理学领域研究这些颗粒如何对人类健康造成损害。剂量学是解决体内(动物测试)和体外(基于细胞的测定)结果之间差异的关键技术之一。对颗粒剂量和浓度的更加准确的量化和预测,将有助于体外 实验更加准确。为此,使用了沉降实验和模拟。
在生物医学研究中,血液沉降被用于研究人体炎症。更快的沉降意味着更多的炎症,也是某些以产生异常蛋白质为特征的疾病的迹象,例如多发性骨髓瘤。沉淀也被用于分离白细胞、红细胞和血小板。在制药应用中,沉降法被用于从结晶后的母液中分离药物,以及从其他蛋白质材料中提纯胰岛素(“制药工业中的离心法综述”)。药物吸附和解吸的研究对制药工业也很重要。
大量非常重要的应用都使用沉降。虽然沉降或离心可以相对容易和快速地进行实验,但是使用计算机绝对更有利,因为可以一次模拟材料和条件的多种组合。此外,数学建模对于理解复杂的沉降现象(如吸附和解吸)通常是必不可少的。
重力作用下的试管沉降方程
在生物工程、基因工程、医学工程和制药应用中,超高速离心机被用于分离颗粒或分子。这主要是因为生物大分子比其他类型的颗粒“更黏”,往往需要更大的力才能沉降。想象一下含有 DNA/RNA 的生物材料有多黏:地球和太阳之间距离的 90 倍被缠绕在一起,装在一对 DNA 链里。有些商业离心机可以产生高达 70000 g (这里是指重力单位)的力。有些离心机上装有激光源,照射在水平旋转的试管上,可以实时测量浓度。
用于描述离心沉降的控制方程称为 Lamm 方程。Ole Lamm 是 Svedberg 的博士生。这个方程只是 Mason-Weaver 方程在柱坐标下的形式,接下我们将对它进行讨论。
与生物分子相比,用于毒理学研究的颗粒(通常是金属或陶瓷)更重、下沉更快。因此,在这些应用中,重力完成了这一工作。将试管垂直放置,颗粒会垂直下沉,如下图所示。
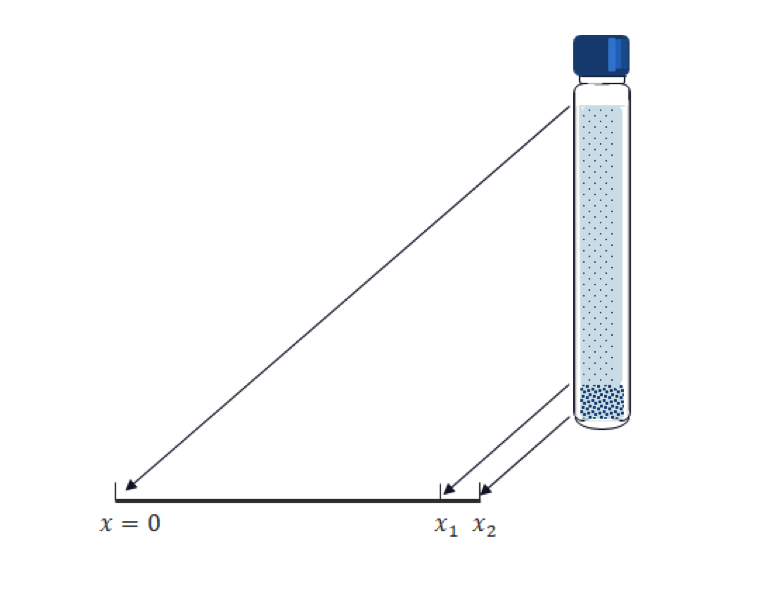
将垂直位置转换为一维坐标  ;对于给定的管长度
;对于给定的管长度  和计算时间
和计算时间  ,可以得到以下 Mason-Weaver 方程:
,可以得到以下 Mason-Weaver 方程:
{\partial c}{\partial t} – \frac{\partial}{\partial x} \left ( A \frac{\partial c} {\partial x} + Bgc \right) =0, \ (x,t) \in [0,x_2] \times [0,T]
其中, 是粒子浓度,待求解的变量 和
是粒子浓度,待求解的变量 和  分别为粒子的扩散系数和沉降速度;
分别为粒子的扩散系数和沉降速度; 是重力加速度。
是重力加速度。
管顶部和底部的边界条件就是所谓的零通量边界条件,即
这个条件意味着边界上的总质量通量(不仅是扩散通量)为零;也就是说,下沉的颗粒在底部积累,因为它们无法排出试管。我们的主要兴趣是粒子的累积质量。为了测量,我们需要设置一个虚构的体积(一维中的段)。在上述几何图形中,区间  就是为此而准备的。请注意,计算出的累积质量因区间大小而异。
就是为此而准备的。请注意,计算出的累积质量因区间大小而异。
初始条件通常均匀分布,如下所示:
式中, 是一个常数函数。
是一个常数函数。
现在,我们有了模拟沉降的所有公式。
Mason-Weaver 方程是一个容易理解和求解的方程,除了极快的沉降情况。让我们试着解释一下它的物理意义。它由两个方程组成:
- 扩散(第二项)
- 重力对流(第三项)
如果我们分别考虑每个现象,会发现对这个方程的解释其实很容易。首先,重的颗粒迅速下沉,几乎没有扩散,并积聚在试管底部。最初,颗粒是均匀分布的。随着沉降的开始,颗粒从顶部消失,底部周围的颗粒数量增加。最后,几乎所有的颗粒都聚集在底部,这意味着浓度函数变得像试管底部的δ函数。较轻的颗粒倾向于漂浮在溶液中,因为它们不受重力影响。这两种现象在现实中是同时发生的。我们用下面的动画演示了两个极端情况。
较重的颗粒(左)和较轻的颗粒(右)的空间浓度分布比较。
粒度分布颗粒沉降仿真 App
上图所示的情况比较简单。然而,在现实世界中,颗粒通常不会单独漂浮在溶液中,并且通常会根据表面电荷或颗粒可能具有的某些结合机制,形成不同尺寸的团聚体。在溶液中,不同大小的团聚体表现不同,正如我们在上面的动画中看到的那样。因此,想象整体浓度分布的样子便不再那么容易了。在 COMSOL Multiphysics® 软件用户界面使用偏微分方程 可以很轻松地模拟单个粒径的 Mason-Weaver 方程,但要模拟更实际的情况并不容易,因为必须考虑粒度分布或其他一些条件或约束。在这种情况下,制作仿真 App 可以提供更大的灵活性和更令人满意的结果。
在下面的部分,我们将演示一些(但不是全部)关键步骤,来制作一个重现 DeLoid 引用的论文结果的仿真 App。
步骤1
在模型开发器中设置几何、材料、基本物理场以及初始条件和边界条件。
代表试管的一维几何图形(左侧为盖子,右侧为底部)。
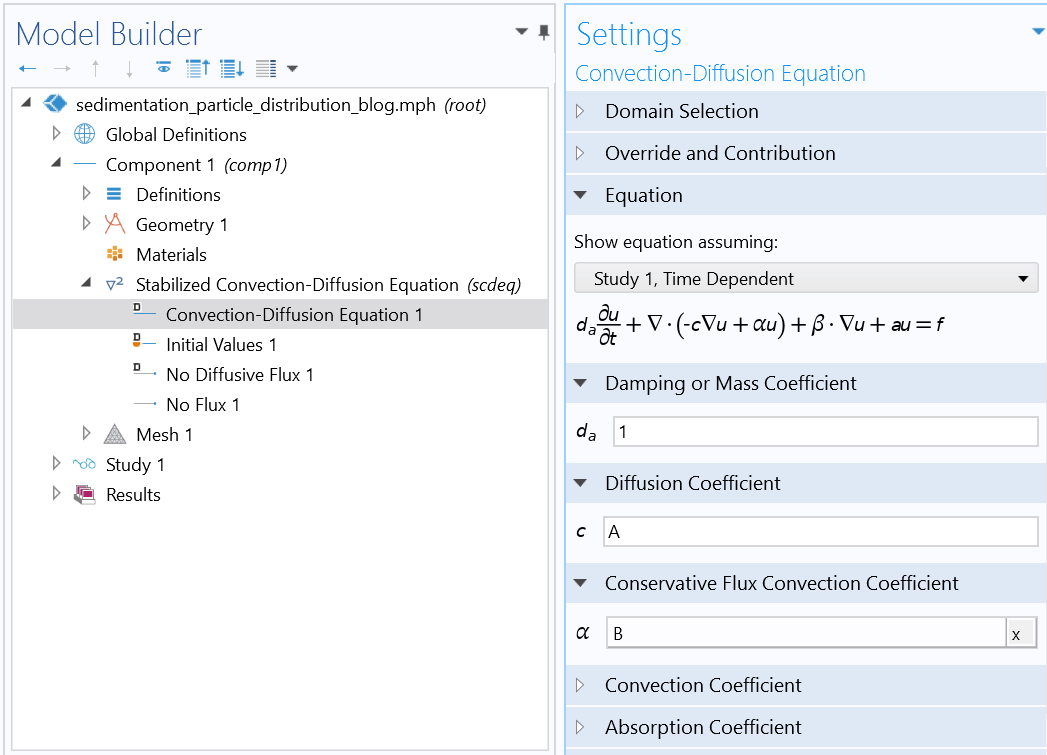
使用经典偏微分方程接口中的 稳定对流-扩散方程接口设置 Mason-Weaver 方程。
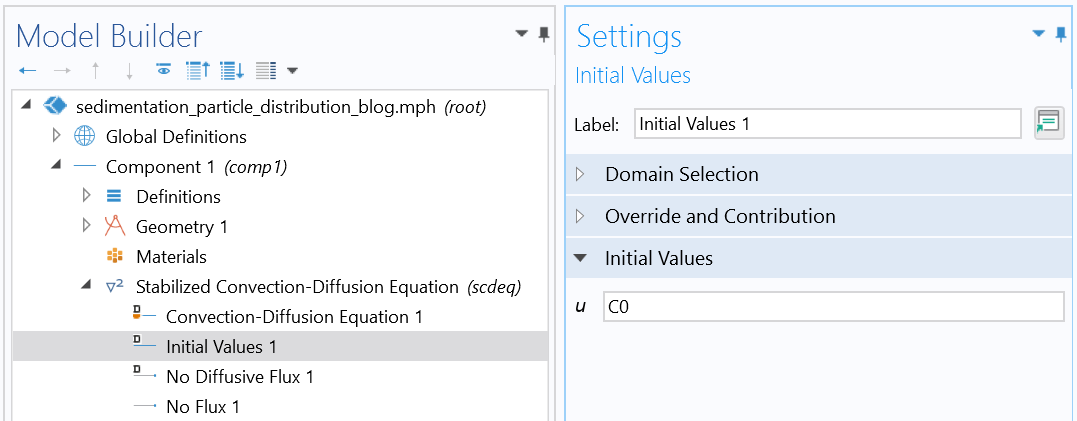
初始条件(均匀分布)。
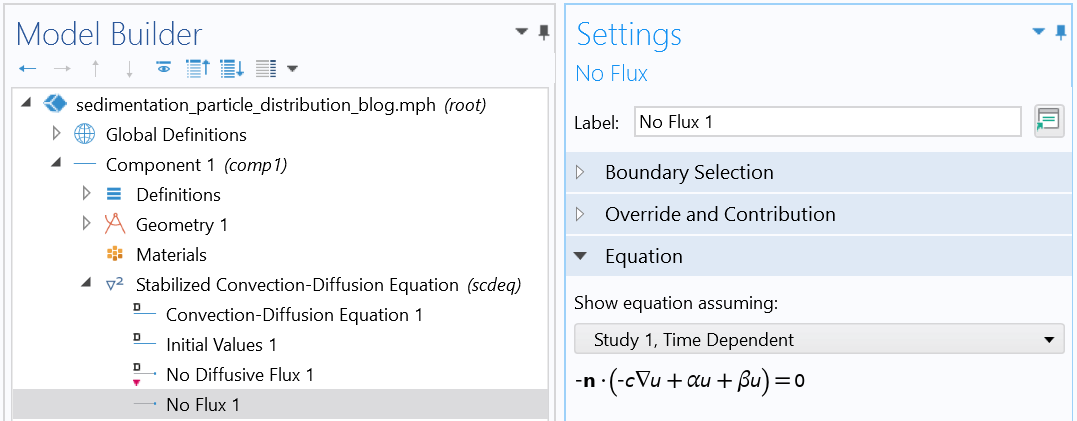
边界条件(反射边界条件)。
步骤2
在 App 开发器中制作自定义 App 的用户界面。

自定义仿真 App 的用户界面,包括几个功能区按钮(顶部)、 参数设置窗口(左)、粒度分布曲线(右上)和 结果图形窗口(右下)。
步骤3
编写 Java® 代码。
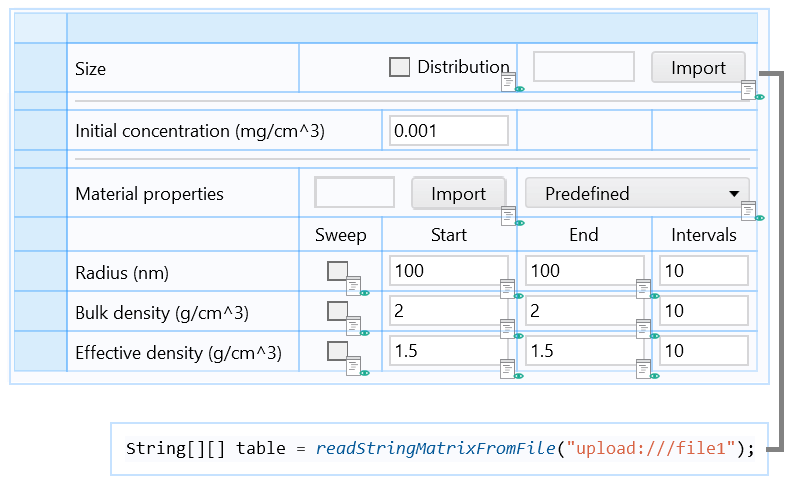
表单的一部分包括与 Java 方法关联的 导入按钮,该方法从文件加载粒度分布数据并将其存储在 二维字符串数组中。

一个用于主 for-end 循环的 Java 方法,对每个更新的粒子大小重复运行。底部的粒子质量是在每个时间步长下被计算出来的,并存储在 二维双精度浮点数组(未显示)中。在运行结束时,将粒子质量相加来计算在底部累积的总质量分数。
使用按照上述步骤制作的这个仿真 App,我们可以获得如下图所示的最终结果。本例中使用的颗粒是 CeO2,它相对较重,容易在底部快速下沉和堆积,如下图(蓝线)所示。颗粒大小显著影响质量分数。较小的颗粒倾向于通过扩散漂浮,而不会一直下沉。因此,当考虑大小分布时,质量分数达到稳定的速度更慢,低于 100%。
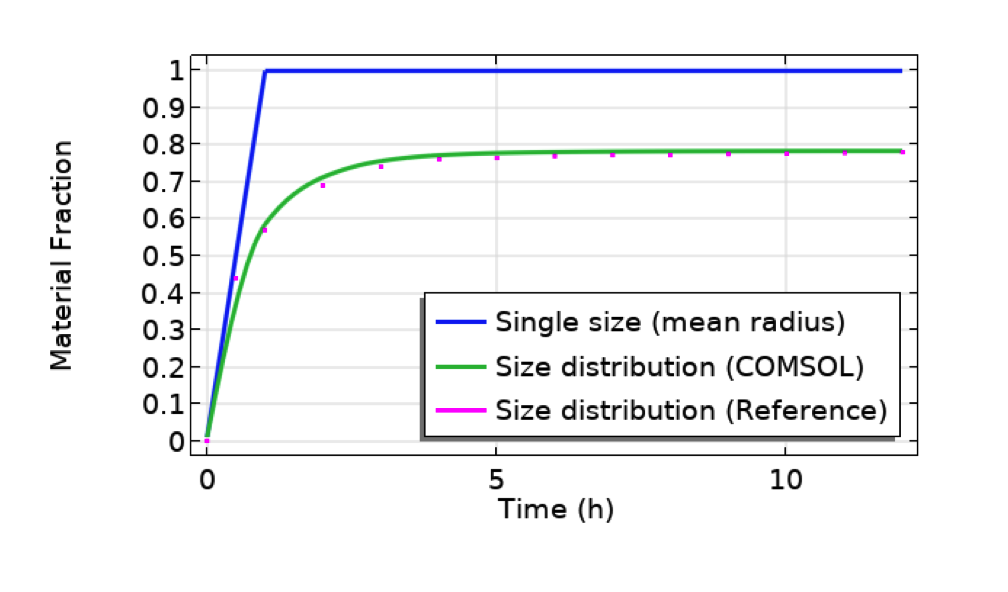
单个粒径(上图用户界面中显示的分布曲线的平均半径为 491nm)和粒径分布的比较(COMSOL Multiphysics 与参考论文的结果一致性较好)。颗粒:CeO2。试管长度:10mm。底部长度:10um。
附加说明
系数 和 可以通过实验得出,或者通过下面列出的流体动力学关系从材料属性中计算。
式中, 分别是玻尔兹曼常数、温度、溶液的动态黏度和粒子的半径,
分别是玻尔兹曼常数、温度、溶液的动态黏度和粒子的半径, 和
和  分别是粒子的有效密度和溶液的密度。
分别是粒子的有效密度和溶液的密度。
如果你想要增强这个仿真 App,可能需要修改或添加更多功能。对于制药或生物医学应用,可能需要考虑颗粒的可溶解性。在底部边界,可能需要考虑另一个解释吸附和解吸的边界条件,而不是反射边界条件。这些增量可以通过添加一个辅助方程来完成。详请参阅 Christmann、Ramteke 和 Dokoumetzidis 的文献。
下一步
单击下面的按钮,探索本文中讨论的沉降仿真 App。以此为灵感,尝试构建您自己的仿真 App,并在评论中告诉我们您的体验!
参考文献
- G.M. DeLoid et al., “Advanced computational modeling for in vitro nanomaterial dosimetry”, Particle and fibre toxicology, vol. 12, no. 1, pp. 1–20, 2015.
- K. Christmann, Introduction to Surface Physical Chemistry, Springer Science & Business Media, vol. 1., 2013.
- K.H. Ramteke et al., “Mathematical models of drug dissolution: a review”, Sch. Acad. J. Pharm, vol. 3, no. 5, pp. 388–396, 2014.
- A. Dokoumetzidis and P. Macheras, “A century of dissolution research: from Noyes and Whitney to the biopharmaceutics classification system”, International Journal of Pharmaceutics 321.1-2 (2006): 1–11.
Oracle and Java are registered trademarks of Oracle and/or its affiliates.
在我年轻的时候,我花了很多时间参加体育锻炼和比赛。随着年龄的增长,我的训练和比赛被安排的越来越晚。我经常会在晚上去踢足球。然而,当我踏上球场时,它几乎像白天一样明亮……
依靠 LED 技术的球场内外
球场附近的灯光使我和我的球队可以一直比赛到深夜。

夜晚灯光明亮的足球场。图片来自 Jonathan Petersson,Unsplash
我的经历并不是独一无二的:几十年来,世界各地的运动队都会在晚上比赛和练习。然而,最近几年,你可能已经注意到,球场上的一些区域比以前更加明亮了。这是为什么呢?
为了提高可持续性,许多体育组织选择用发光二极管(LED)技术来取代他们体育场馆的传统照明系统。LED 灯泡不仅比传统的白炽灯泡更节能,而且更亮。根据美国环境保护署(EPA)的说法,“绿色运动”的好处包括:
- 保护生物多样性
- 降低运营成本
- 创造和扩大绿色产品和服务市场
- 其他更多的好处
一种常用来为各种户外(和室内)体育场馆和球场照明的 LED 灯泡是 LED 玉米灯泡。就像一个运动员将日常生活和体育锻炼融入到一个时间表中一样,LED 灯泡必须将许多功能融入到一个系统中。通过仿真,工程师可以研究和更好地理解 LED 技术背后的原理。我们将在今天的博客文章中探讨一个例子。
多功能 LED 灯泡
走进一家五金店,经过庭院家具、烧烤架和户外电源设备的陈列台,你可能会发现一片 LED 玉米灯泡整齐地藏在一个专门用于照明设备的过道里。在这个区域,你可以看到各种各样大小、样式和价格不同的 LED 灯。它们通常由一二百个微小的发光二极管组成,排列在一起并固定在金属或环氧树脂结构上。非常贴切地,LED 玉米灯泡是以与它们形状相似的蔬菜命名的:玉米棒。

一个 LED 玉米灯泡。图片来自 Dmitry G – 自己的工作。通过Wikimedia Commons 获得CC BY-SA 3.0许可共享。
玉米 LED 灯泡的独特形状可能会吸引消费者的眼球,但正是它们的节能性能让它们成为高强度放电(HID)和白炽灯泡的热门替代品。与白炽灯泡相比,LED 预计将节省 75% 的能源,使用寿命可延长 25 倍。(参考1)。
为了增加它们的多功能性,这些灯泡的色温范围从 2700K 到 6000K。LED灯泡的色温代表灯的颜色。高开尔文(5500K-6500K)的灯泡是亮白色,低开尔文(2700-3000K)的灯泡是暖白色。
LED 玉米灯泡有多种风格,可适用于室外和室内应用,照亮从车库和仓库到高速公路和体育场的所有地方。
设计 LED 的挑战
尽管 led 通常被认为比传统灯泡更有高效,但在将电转化为光方面,它们仍然不是 100% 的有效。它们的一些能量以热量的形式释放出来。这种热量会滞留在灯泡的颈部,导致灯泡中的电子元件(如芯片)随着时间的推移而退化。因此,有些人已经注意到,LED的寿命只是其包装上承诺的寿命的一小部分。因此,热管理是设计 LED 灯泡时的一个重要考虑因素。
传热建模可以用来优化LED灯泡设计的几何形状和材料,估计灯泡内将会发生的最高温度。今天,我们将探索LED玉米灯泡的热模型。
在COMSOL Multiphysics®中模拟LED灯泡
LED 灯泡冷却教程模型
LED 灯泡冷却教程模型通过考虑 LED 芯片的加热、浮力驱动气流的冷却和周围环境的辐射来估计 LED 玉米灯泡的温度。此外,还考虑了能量传输和动量传输之间的耦合,来计算 LED 灯泡内外的非等温气流。
模型概述
模型灯泡由以下部分组成:
- 透明丙烯酸塑料,顶部有 6 个孔
- 8 个横向 PCB 支持 18 个 LED 芯片
- 1 个顶部 PCB 支持 12 个 LED 芯片
- 一个钢底座
灯泡的总功率为5 W。
下面,我们可以看到四分之一 LED 灯泡几何形状的两个不同角度。请注意,由环氧树脂制成的 LED 芯片显示为橙色。由铝制成的多氯联苯显示为棕色。


LED 灯泡几何形状的正面视图,突出 LED 芯片在侧面 PCB 上的位置(左)。显示 LED 芯片在顶部 PCB 上位置的视图(右)。
建模结果
使用 固体和流体传热 和层流 接口计算了灯泡内外气流的温度分布和速度大小。
如下图所示,本研究中 LED 芯片的最高温度达到76 °C。自然对流的最大速度量级为 0.2m/s。


标称功率为 5W 的灯泡中 LED 芯片的温度分布(左图)。灯泡内外气流的速度场大小(右)。
注意:在 COMSOL Multiphysics 的 5.6 版本中,这个 LED 灯泡模型的计算时间比 5.5 版本缩短了 10%。点击此处了解更多信息。
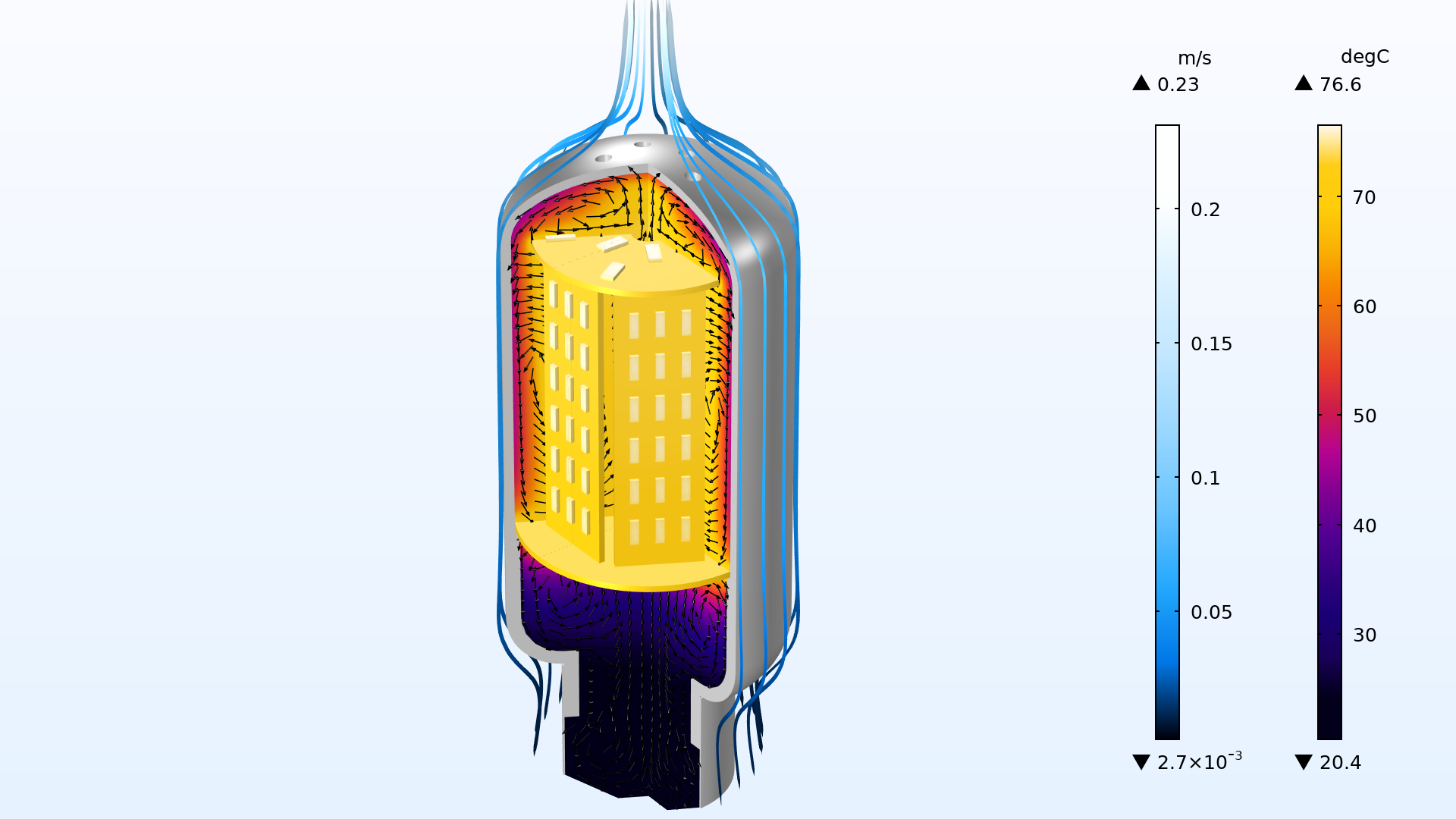
LED 灯泡模型中温度分布(表面图)和速度(箭头和流线)的仿真结果。
研究现实生活中的 LED 灯泡设计
在教程文档中,我们做了一些之前从未做过的事情:将模拟结果与我们进行的真实实验进行比较!
在我们的实验中,两个 LED 灯泡被固定在一个垂直的板上,它们的属性与教程模型中的 LED 灯泡相似。它们通过 230V 交流家用电流供电。两个灯泡内部的温度是用一个基本的红外摄像机计算出来的。72°C 是观察到的最高温度(接近本教程中观察到的最高温度)。

我们的实验装置。

和教程模型一样,实验中使用的两个玉米灯泡都有一个塑料保护层,这有助于保护它们的二极管不受外界环境的影响,比如灰尘。
虽然我们可能需要一个更细致的实验来给出模型和现实之间差距的精确定量,但这个实验可以作为概念的证明。具体来说,它强调了LED灯泡的冷却受其垂直或水平方向的影响最小。这些结果与LED灯泡冷却教程模型的结果吻合较好。
现在轮到你了…
在今天的博客文章里,我们讨论了如何通过传热模拟来分析LED灯泡的热管理。点击下面的按钮,自己动手尝试LED灯泡冷却教程模型:
进一步的阅读
在 COMSOL 博客上阅读其他 LED 建模的例子:
参考文献
- “LED Lighting”, Office of Energy Efficiency and Renewable Energy, U.S. Department of Energy, https://www.energy.gov/energysaver/save-electricity-and-fuel/lighting-choices-save-you-money/led-lighting.