你是否也经历过这些烦恼:正准备出门,却发现忘了给手机充电;或者正在路上,突然想起电动汽车需要充电。固态电池一旦应用于电动汽车、电子设备和储能系统,诸如此类的问题将彻底成为历史。固态电池不仅有望实现充电更快、续航更长,还具备更高的安全性。仿真技术能够帮助电池设计师深入研究固态电池,更准确地预测其在未来应用中的性能表现。
固态电池:一项备受期待的技术
固态电池(Solid-state batteries,SSB)采用固态电解质在电极间传导离子,而传统电池则使用液态电解质或凝胶聚合物。这种差异使得固态电池相较于锂离子电池具备诸多优势,例如更长的使用寿命。当前电动汽车电池的使用寿命通常为 5–8 年,而固态电池可将寿命延长至 15–20 年。此外,常规的锂离子电池在 1000 次充放电后性能衰减明显,固态电池则能在 5000 次充放电循环后仍保持 90% 的初始容量(参考文献 1)。
 固态电池应用于电动汽车意味着更短的充电等待时间。照片来自 Haberdoedas, 发布在 Unsplash.
固态电池应用于电动汽车意味着更短的充电等待时间。照片来自 Haberdoedas, 发布在 Unsplash.
固态电池的充电速度也远超其他类型的电池。普通锂离子电池充电至 80% 的电量大约需要 45 分钟,而固态电池充电到相同电量仅需 12 分钟,甚至最短只需 3 分钟。固态电池的安全性也更高——由于不含液态电解质,其可燃性和挥发性远低于其他电池。此外,通过避免使用液态电解质和碳阳极,它们还能提供更高的能量存储密度(参考文献 1)。
跨越数十年的设计挑战
固态电解质最早是由物理学家迈克尔·法拉第于19 世纪 30 年代初发现的,其工作原理与潜在应用从那时起就成为研究焦点。时间快进至21世纪20年代,众多汽车制造商、电子企业和研究机构正将大量研发资源投入到固态电池领域。然而,电池的研究和设计是一个成本高昂且资源密集的过程,仿真技术可协助开发者研究和探索在不同工况和应用场景下的设计难题。
固态电池会受到 锂化 现象的影响,在这一过程中,电池固态组件内的电极会发生膨胀和收缩,从而产生机械应力。此外,在充放电过程中电池内部离子的迁移同样会导致应力与体积变化。这些问题可能会缩短电池寿命、降低储能效率,甚至导致机械故障。
多物理场建模和仿真可用于分析固态电池的设计。在固态电芯的异构模型教程模型中,我们将带您了解在 COMSOL Multiphysics® 软件中的建模过程。
在 COMSOL Multiphysics® 中模拟固态电池
固态电芯异质模型的教程模型模拟了固态电池的充放电循环,重点研究了电荷和质量传输与固体力学之间的相互作用。该模型的几何结构由复合正极、锂金属负极以及位于两个电极之间的固态电解质隔膜组成。
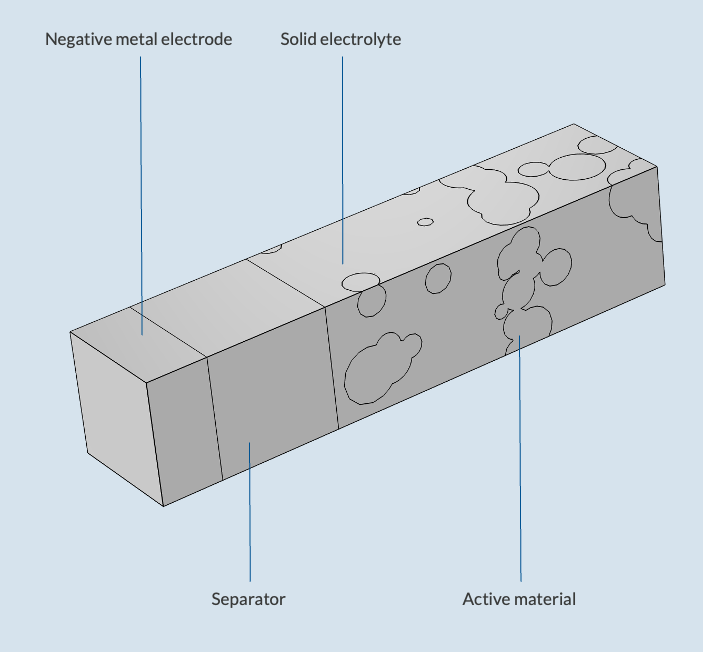 固态电池模型的几何结构。
固态电池模型的几何结构。
软件中内置的专用物理场接口与功能使模型设置简单直观。通过 锂离子电池,固体传递, 以及 固体力学 接口,可分别实现电荷守恒、质量守恒与动量守恒的建模。此外,软件还提供专门的功能用于模拟:
- 负极金属锂的沉积与溶解
- 正极的膨胀与收缩
- 电极-固态电解质界面处的氧化还原反应
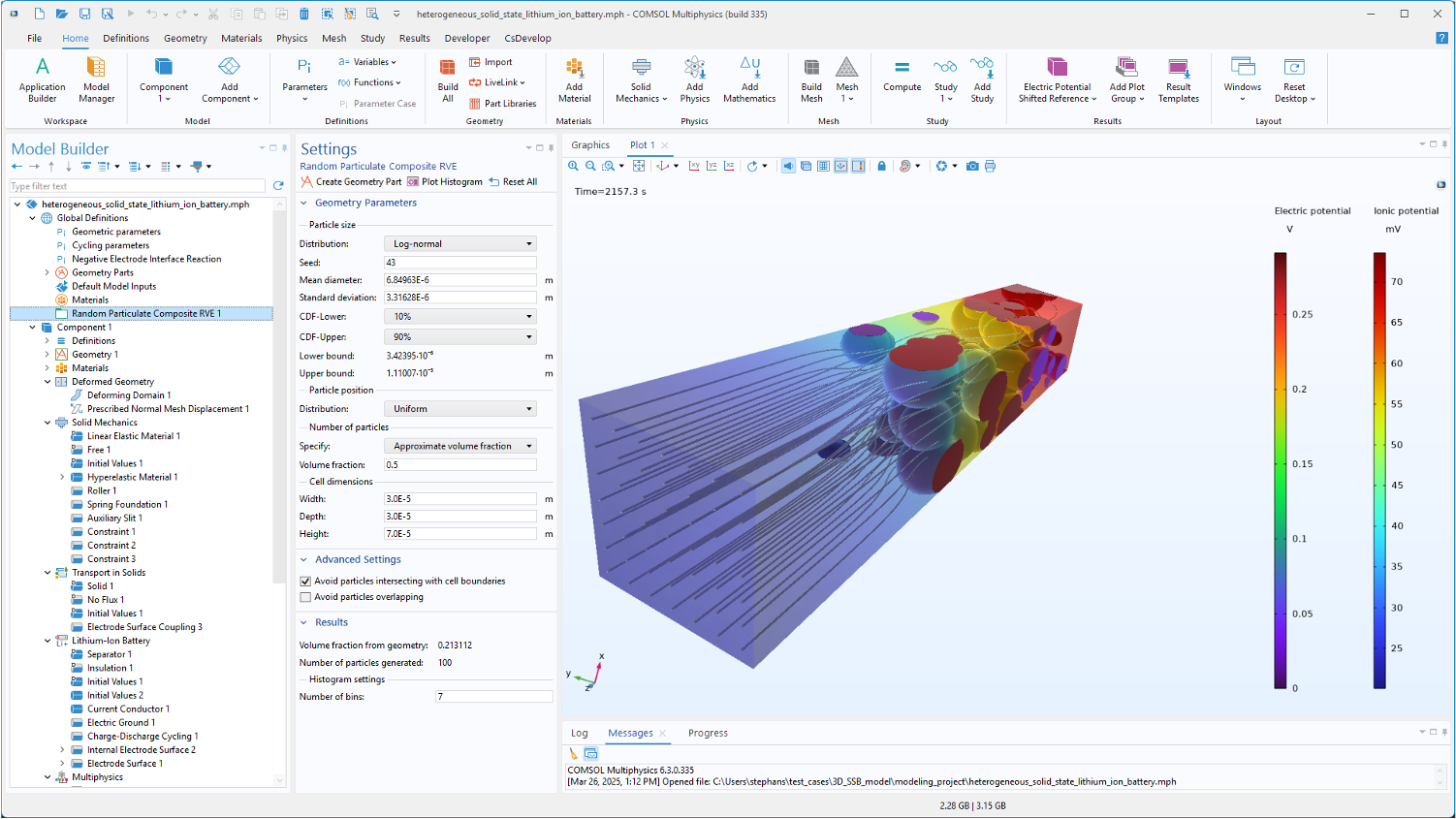 COMSOL Multiphysics® 中的固态电池模型与物理场的设置。
COMSOL Multiphysics® 中的固态电池模型与物理场的设置。
异质固态电池的模拟对充电结束时的若干物理量进行了评估,包括固态电解质中的电势、离子电势及 von Mises 应力。
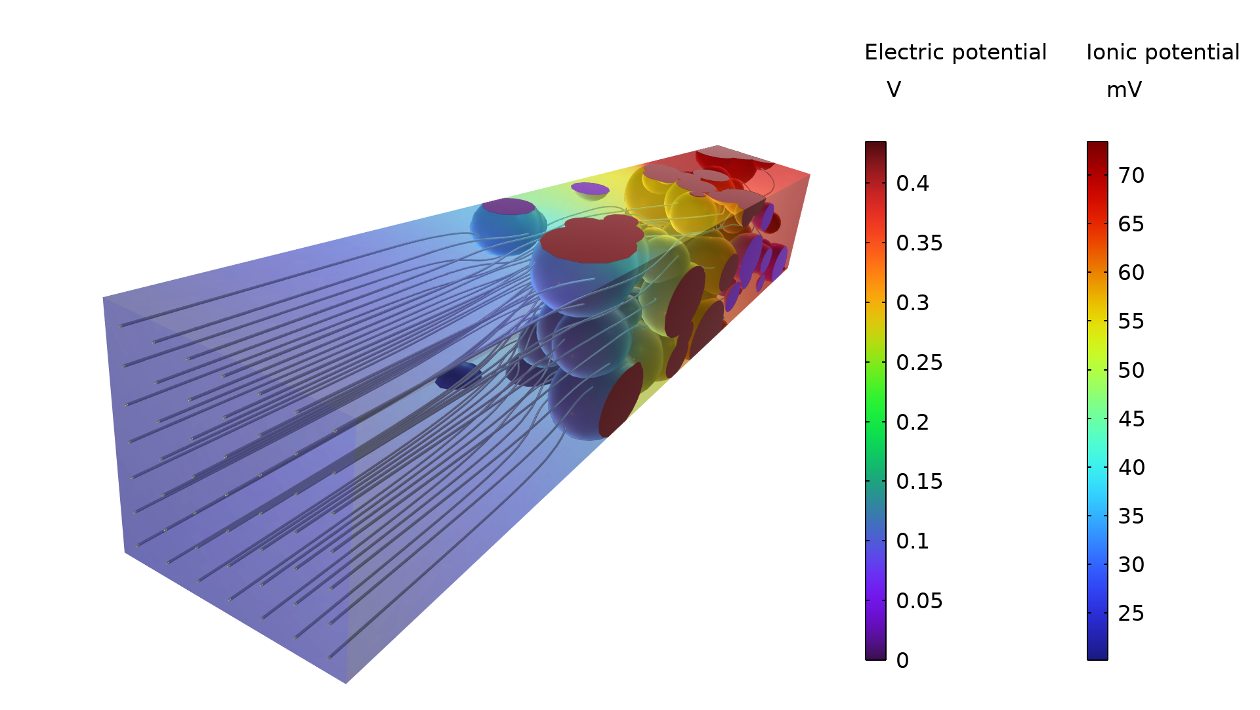
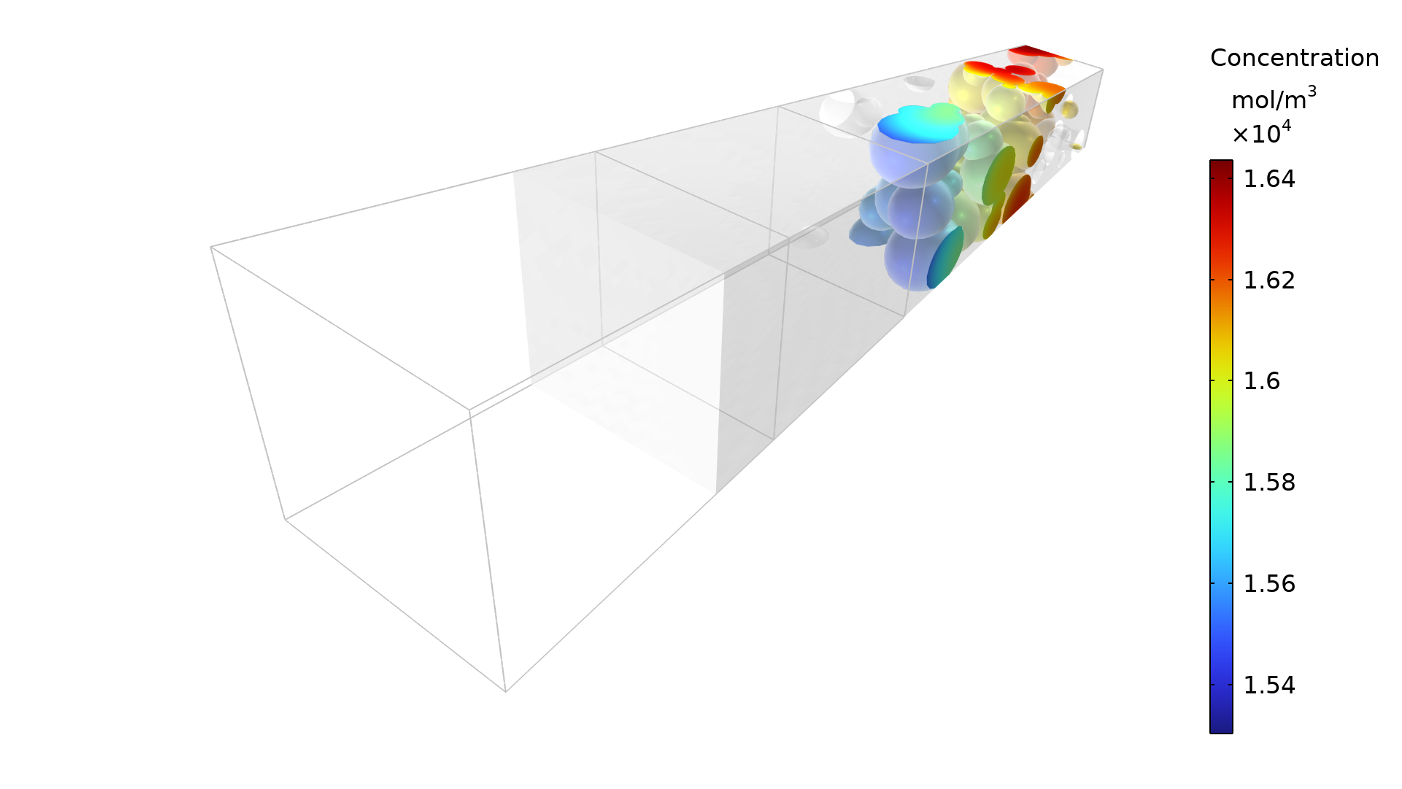
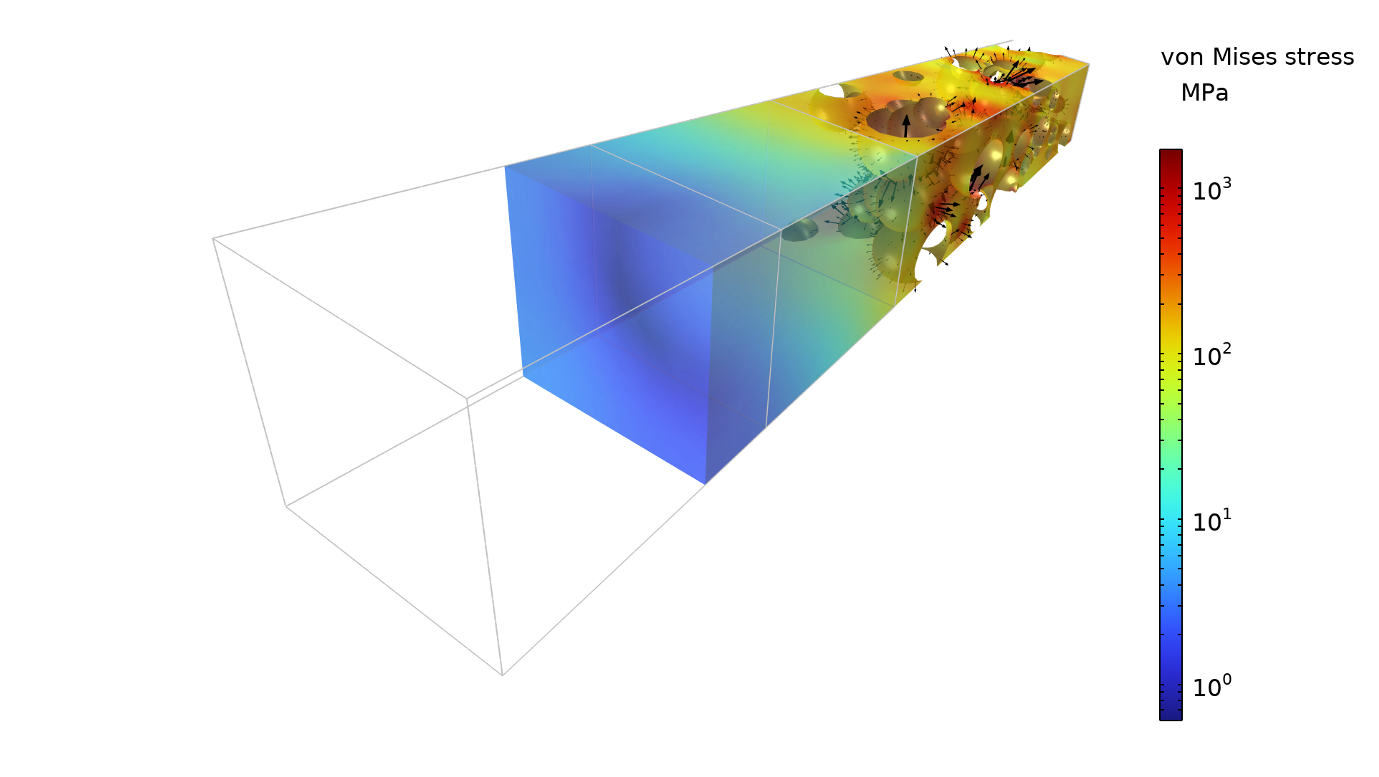
固态电解质中的电势(左)、正极浓度(中)以及应力(右)。
模拟结果还包括对全局量的评估,包括电池电压、充电状态以及 z 方向的应力。
为固态电池的发展铺平道路
借助仿真技术研究固态电池的力学特性,可帮助研究人员、汽车制造商及电子企业在未来几年(而非几十年)将固态电池整合到零部件与设备中。
点击下方按钮,亲自动手尝试固态电芯异质模型的建模与仿真。我们也建议您为电池仿真配备以下 COMSOL Multiphysics® 附加产品:电池模块、CAD导入模块、结构力学模块以及非线性结构材料模块。
扩展阅读
参考文献
- Shang et al., “A comprehensive review of solid-state lithium batteries: Fast Charging characteristics and in-operando diagnostics,” Nano Energy, vol. 142, part B, 2025. Doi: 10.1016/j.nanoen.2025.111232
软体机器人是工程师越来越感兴趣的一个领域,特别是由于其在生物医学行业的应用正日益增加。随着仿生学的不断发展和进步,软体机器人在如假肢、人造肌肉和手术器械等应用中的潜力巨大。在这一领域,执行器发挥着重要的作用,因为它们实质上充当的是机器人的肌肉。这篇博客,我们将通过一个受蝠鲼启发的软体机器人模型,探讨离子聚合物金属复合材料(IPMC)如何被作为执行器使用。
受蝠鲼启发的软体机器人
传统上机器人是由刚性硬质材料制成的。然而,软体机器人的开发(利用弹性体、凝胶或硅橡胶等柔性材料设计机器人)极大地扩展了机器人的应用方式,尤其是在仿生学和生物医学领域。例如,受蝠鲼启发设计的软体机器人可以被远程控制或在其底部安装传感器,这让科学家可以在不干扰水生生物的情况下收集数据,用于海洋多样性研究。相较于传统的螺旋桨动力水下航行器,软体机器人的机动性更高,不容易被水生植物缠住,并且造成的湍流也更小。
 自然环境中的蝠鲼。照片由 Ishan @seefromthesky 拍摄,通过Unsplash 共享。
自然环境中的蝠鲼。照片由 Ishan @seefromthesky 拍摄,通过Unsplash 共享。
借助建模和仿真,软体机器人工程师能够研究蝠鲼机器人的设计,来提高其仿生能力。COMSOL 案例库中的机器人蝠鲼中的离子聚合物-金属复合材料执行器模型展示了一种通过建立模型来研究蝠鲼机器人执行器性能的方法。该模型长约 20 cm,翼展宽约 50 cm,与真实建立的蝠鲼机器人大小相当。该模拟使用 IPMC 执行器为机器人提供动力,通过 收缩和膨胀 多物理场耦合节点对流体环境(如海水下)中的运动做出反应。IPMC 是一种电活性聚合物,常用作在电刺激下能产生较大变形的驱动材料。离子电活性聚合物由离子传输产生的膨胀效应提供动力,通常只需要 1 或 2 V 的驱动电压,就能自然产生弯曲运动。这种材料具有质量轻、可操作性强的特点,并且能够在电刺激下产生拍打运动,而不是能效低下的电力传输,因此是人造肌肉的理想材料。
收缩和膨胀 多物理场耦合节点是 COMSOL Multiphysics® 6.3 版本的新增功能。这种耦合对于模拟因物质进入和溶出材料时分别经历的膨胀和收缩尤为有用。在这类模型中,当物质离开材料时会产生收缩,类似于海绵吸水后膨胀而变干后收缩。在本文示例的模型中,这种物质是水合阳离子,它会导致蝠鲼鳍收缩和膨胀从而产生运动。
蝠鲼机器人模型
模拟离子聚合物-金属复合材料
在示例模型中,鳍的两根悬臂梁由三层 IPMC 材料制成,中间层包含容纳移动离子的聚合物。顶层和底层均由一块薄金属板组成,金属板能够导电并形成电压差,使带电粒子上下移动,产生拍打运动。
驱动力由施加在两个金属电极板上的外部电压提供,上部电极施加正弦电压,下部电极接地。鳍片被牢固地固定在梁上,并且可以被动变形。通过测量变形来检测由于运动导致的形状变化程度。在这个示例中,运动由聚合物中水合阳离子浓度变化产生的膨胀引起。IPMC 通过多物理场效应产生力,其中涉及结构变形、质量传输和电流。该模型通过耦合 固体传递 和 固体力学 接口来考虑由膨胀引起的悬臂梁变形,所使用的与位移、浓度和电势相关的本构方程根据热力学原理推导。
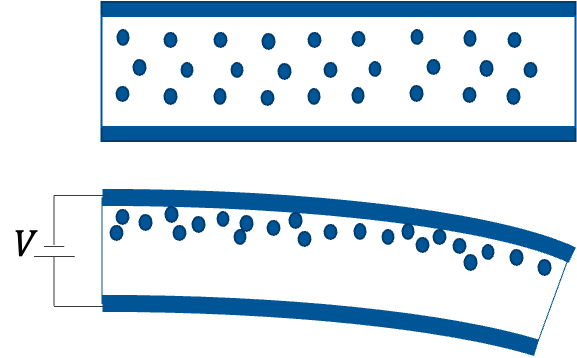 IPMC 悬臂梁如何因粒子位置的改变而弯曲、收缩和膨胀的直观展示。
IPMC 悬臂梁如何因粒子位置的改变而弯曲、收缩和膨胀的直观展示。
此外,固体中的电荷守恒 功能用于实现离子聚合物悬臂梁所在的固体域电荷守恒,固体传递 接口用于跟踪由化学势梯度驱动的扩散。
蝠鲼的运动
模拟结果表明,两根 IPMC 悬臂梁的移动可以通过电压控制。这项研究的重点是展示当改变输入电压(例如电池电源)时,蝠鲼可以运动,突出展示了两根 IPMC 悬臂梁可以成功地产生均匀的拍打运动。然而,并未对该模型进行扩展来演示蝠鲼如何在水中响应或是否会游泳。
下图左显示了所施加的正弦输入电压(5 V,0.2 Hz),可以看出两根 IPMC 悬臂梁之间存在相位延迟。下图右显示了 IPMC 梁产生的挠曲,可以看出靠近后缘的梁(绿线表示)由于长度较长,变形更为明显。正阳离子在聚合物中的周期性运动导致悬臂梁膨胀而发生周期性弯曲。
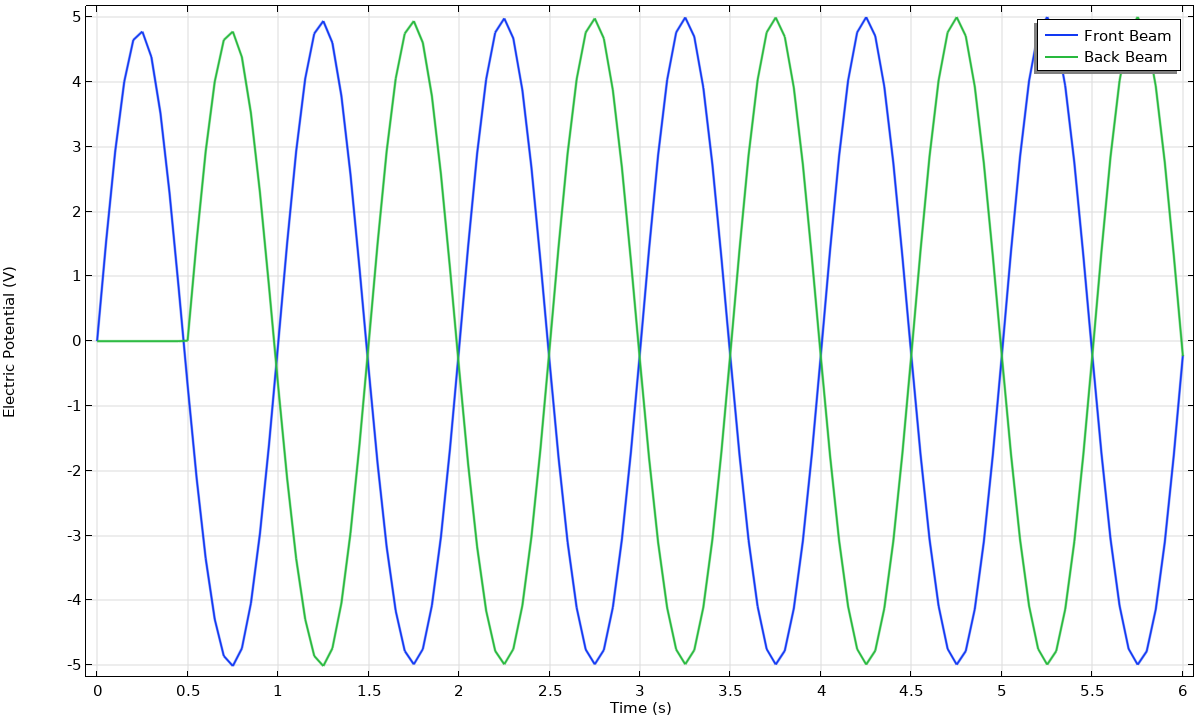
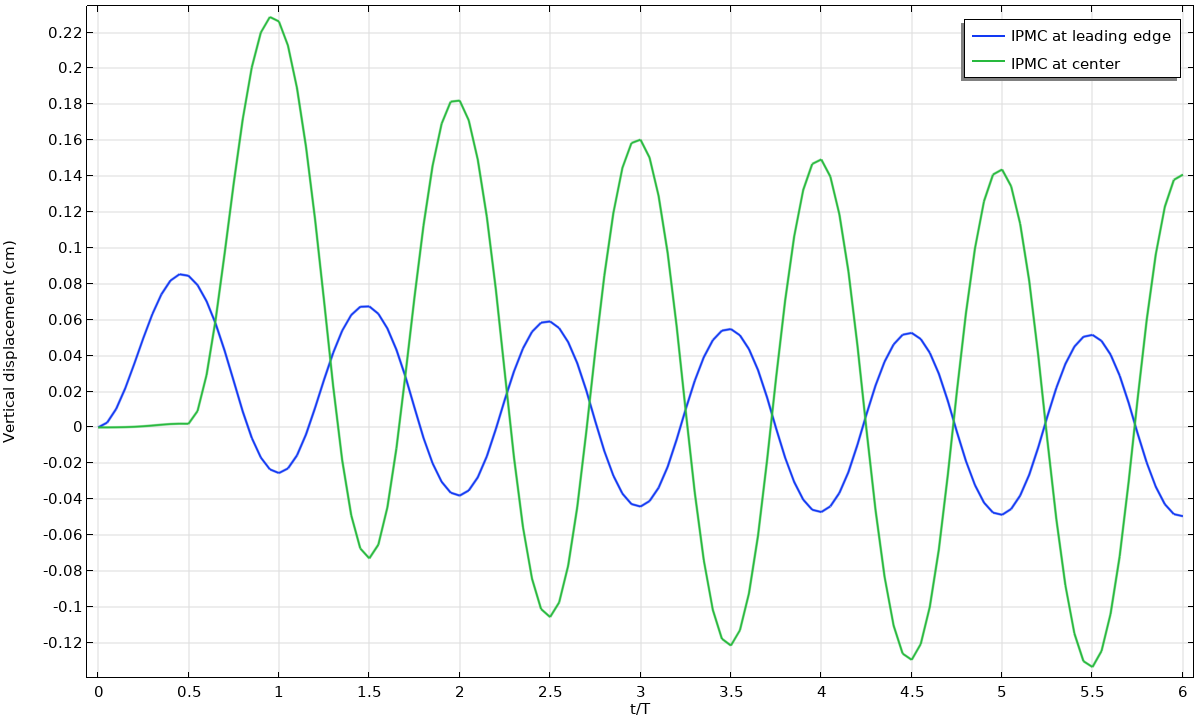
左图显示了两个 IPMC 悬臂梁的施加电压(相位差)。右图显示了悬臂梁因膨胀而发生周期性弯曲。
下图显示了沿整个悬臂梁厚度的粒子浓度分布,左侧为梁底部,右侧为梁顶部。从图中可以看出,电极交界处附近的浓度梯度变化很大,这表明阳离子在厚度上的不均匀分布导致悬臂梁膨胀变形而发生周期性弯曲。当一侧粒子浓度较高时,需要更多的空间来容纳,因此材料发生膨胀以尽可能多地容纳它们。
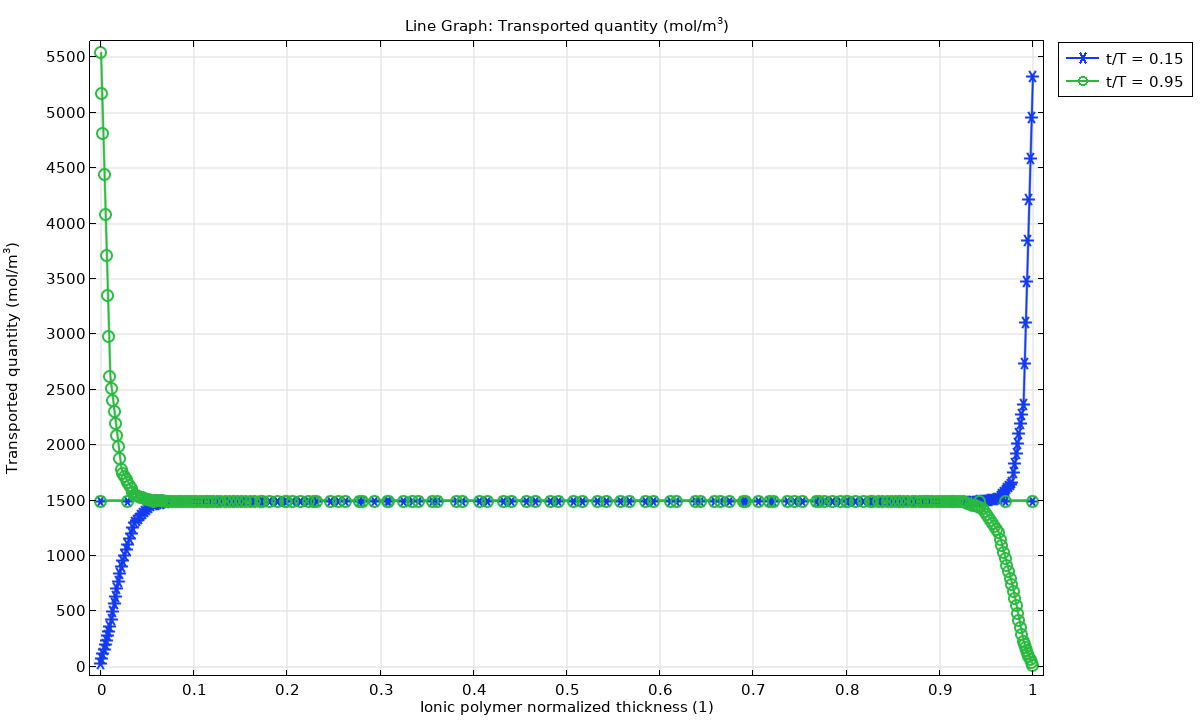 图中显示了阳离子沿每个悬臂梁厚度的分布不均匀,产生浓度梯度,引起悬臂梁膨胀而导致梁弯曲。
图中显示了阳离子沿每个悬臂梁厚度的分布不均匀,产生浓度梯度,引起悬臂梁膨胀而导致梁弯曲。
下一步
想亲自动手尝试模拟蝠鲼机器人模型吗?点击下方链接,进入 COMSOL 案例库下载相关的 MPH 文件:
延伸阅读
- 点击此处,了解更多有关软体机器人世界的信息:
- 了解软体机器人技术的可能性: 软机器人技术让柔性机器人设计初具雏形
- 了解科学家如何利用机器鱼设计水生机器人: 借助仿真研究鱼类的游动形态
褶皱研究是一个跨学科的课题,无论是空间工程领域的充气天线,还是生物工程中常见的皮肤褶皱研究均有所涉及。无论从事哪个领域工作的工程师和研究人员,只要涉及薄结构,都熟悉褶皱产生的基本原理:当薄结构受到压应力时,刚度不足或刚度降低将会产生褶皱。这篇博客,我们将探讨如何使用 COMSOL Multiphysics® 软件模拟褶皱。
引言
在结构仿真中,薄结构通常使用壳单元或膜单元模拟。壳单元会考虑结构的弯曲刚度,而膜单元不会。这一基本差异决定了这两种单元类型处理褶皱仿真的方式。当考虑弯曲刚度时,与壳模拟一样,在以弯曲刚度为特征的临界压应力下,会出现褶皱。另一方面,如果不考虑弯曲刚度,与膜模拟一样,则在一开始产生压应力时就会出现褶皱。
在这两种情况下,褶皱都被认为是一种不稳定特征,也称为 局部屈曲。使用壳单元模拟褶皱时,有必要进行屈曲后分析。值得注意的是,网格离散化和任何几何缺陷都会对最终结果产生重大影响。壳模拟的优势在于可以获得有关波长和振幅等褶皱特征的详细信息。然而,在许多仿真场景中,皱褶的详细特征并不特别重要;相反,主要目标是避免问题区域出现皱褶。在这种情况下,使用膜单元模拟褶皱可能更有优势,因为这种方法计算成本低,而且数值稳定性更好。
接下来,我们将逐一介绍这两种模拟方法。在 COMSOL Multiphysics® 中,壳单元和膜单元分别使用 壳 接口和 膜 接口模拟。

另一个熟悉的褶皱示例:船帆。照片来自Unsplash,由 Karla Car 提供。原作品经过修改。
使用膜接口仿真
使用 COMSOL 中的 膜 接口模拟变形的薄结构存在以下三种可能的状态之一:
- 绷紧的 — 当两个面内主应力均为正值时
- 松弛的 — 当两个面内主应力均为负值时
- 褶皱的 — 当面内主应力之一为负值时
常规膜理论采用的是考虑了褶皱区域中压应力的全应变能公式,从而产生了不稳定的解。为了避免由压应力产生的平衡不稳定性,我们提出了(基于张力场理论的)修正膜理论。修正膜理论在褶皱区域返回单轴应力状态,在松弛区域返回零应力状态,从而避免了平衡不稳定性。修正膜理论有两种主要方法: 修正的变形张量和修正的本构关系。
修正的变形张量公式
为了理解褶皱动力学,我们来看下面这幅图:
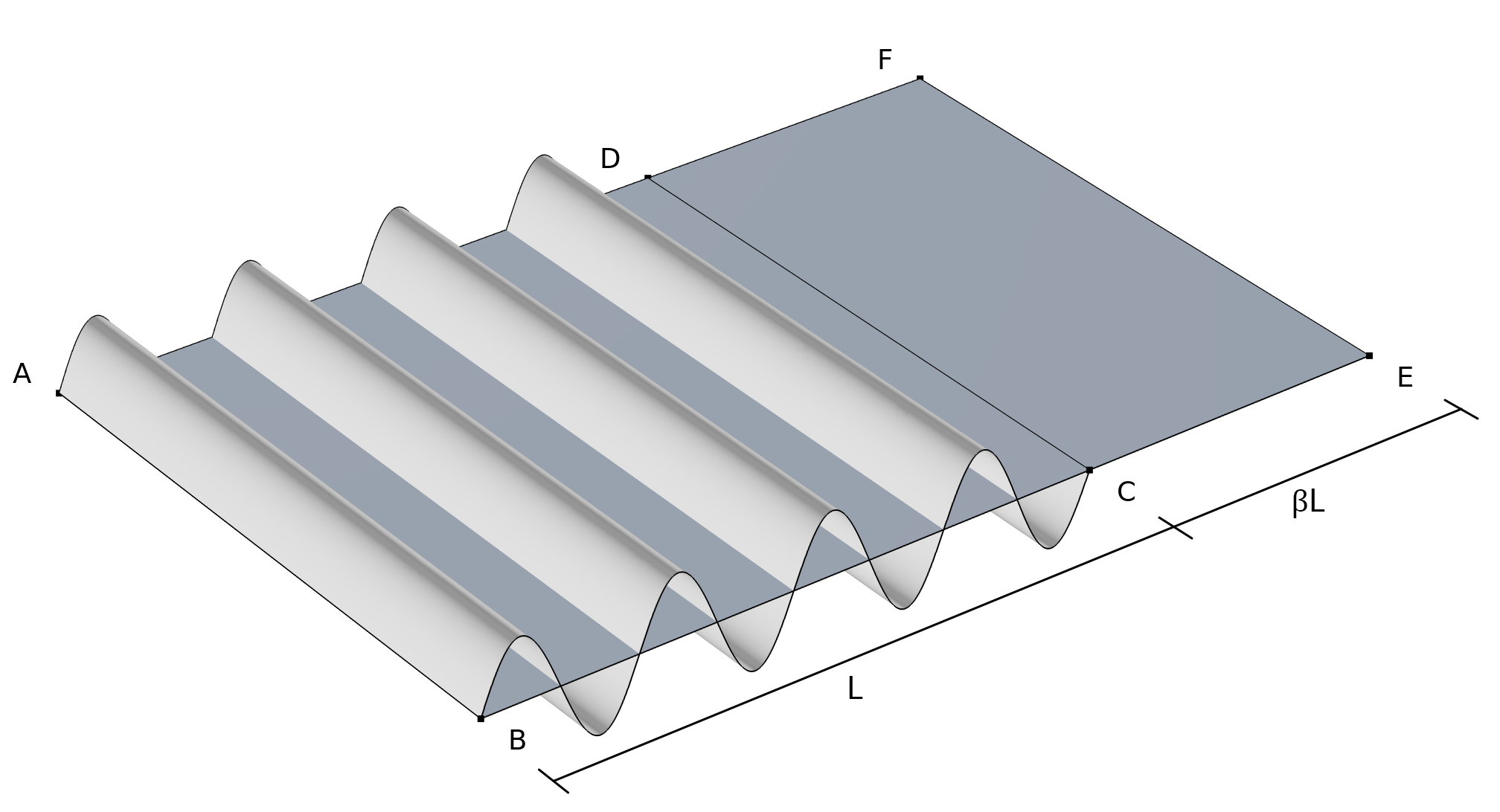
褶皱动力学。弧形表面 ABCD 代表褶皱构型,平面 ABCD 代表平均构型,平面 ABEF 代表加长构型。
对于褶皱膜,上图显示了三种不同的动力学描述:
- 变形张量
 将参考构型映射为真正的皱褶构型(弧形表面 ABCD)。
将参考构型映射为真正的皱褶构型(弧形表面 ABCD)。 - 不适合测定褶皱膜中的应变场
- 变形张量
 将参考构型映射为平均构型(平面 ABCD), 其面积小于实际皱褶面积。
将参考构型映射为平均构型(平面 ABCD), 其面积小于实际皱褶面积。 - 不适合测定褶皱膜中的应变场
- 变形张量 将参考构型映射到一个虚构的加长构型(平面 ABEF),其面积等于实际皱褶面积。
- 适用于测定褶皱膜中的应变场
假设褶皱发生在  方向,且
方向,且  为单轴拉伸方向, 为修正的变形张量,记为
为单轴拉伸方向, 为修正的变形张量,记为
式中,  是拉伸/褶皱参数 (参考文献1)。符号
是拉伸/褶皱参数 (参考文献1)。符号  表示两个向量的外(二元)积,产生一个张量。
表示两个向量的外(二元)积,产生一个张量。 表示绷紧条件。根据正交条件和张力场理论,
表示绷紧条件。根据正交条件和张力场理论,
其中,  是柯西应力。用第二皮奥拉-基尔霍夫应力表示为
是柯西应力。用第二皮奥拉-基尔霍夫应力表示为
假设平均构型已知 ( ), 那么未知数就是 和 。
), 那么未知数就是 和 。
让我们把这些方程映射到更方便的参考构型中,因为膜动力学和材料特征都在参考构型中。假设  是参考构型中与矢量 相对应的矢量。因此,虚构的格林-拉格朗日应变张量
是参考构型中与矢量 相对应的矢量。因此,虚构的格林-拉格朗日应变张量  可写成
可写成
式中, 是平均右柯西张量,
是平均右柯西张量,  是参考配置中的单位向量,
是参考配置中的单位向量,  是新的皱褶参数。
是新的皱褶参数。
膜表面有一个坐标系,有两个面内正交单位矢量,  和
和  。
。  和 与角度
和 与角度  的关系式为
的关系式为
下列非线性耦合方程用于求解两个未知数 和 ,
这两个非线性代数方程可以用牛顿-拉夫森方法求解:
f_{1,\alpha} & f_{1,\beta^*}\\
f_{2,\alpha} & f_{2,\beta^*}
\end{pmatrix} \begin{pmatrix}
\Delta \alpha\\
\Delta \beta^*
\end{pmatrix} = \begin{pmatrix}
-f_1\\
-f_2
\end{pmatrix}
式中, 和 在每个高斯点上应用局部牛顿-拉夫森方法,并在全局范围内进行迭代求解得到的。
褶皱功能
修正的变形张量方法可以通过 皱褶 子节点实现,该节点内置在 膜 接口的 线弹性材料 和 超弹性材料 节点下。皱褶 子节点有三种不同的局部牛顿-拉夫森方法的终止准则选项,并允许用户调整公差。
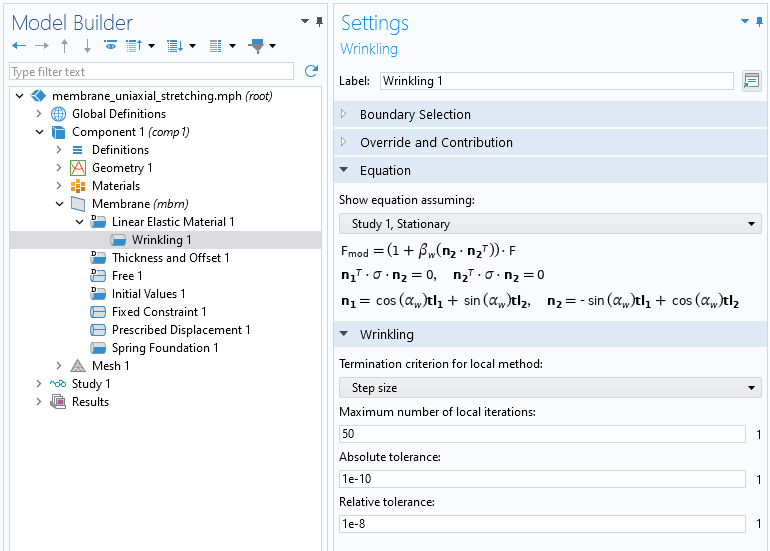
线弹性材料 特征下的 皱褶 子节点。
COMSOL 案例库中有几个示例展示了如何使用 膜 接口的内置功能建立褶皱模型。矩形膜的单轴拉伸 模型是一个容易分析验证的简单模型。在这个例子中,将数值结果与分析结果进行了比较,如下图所示:
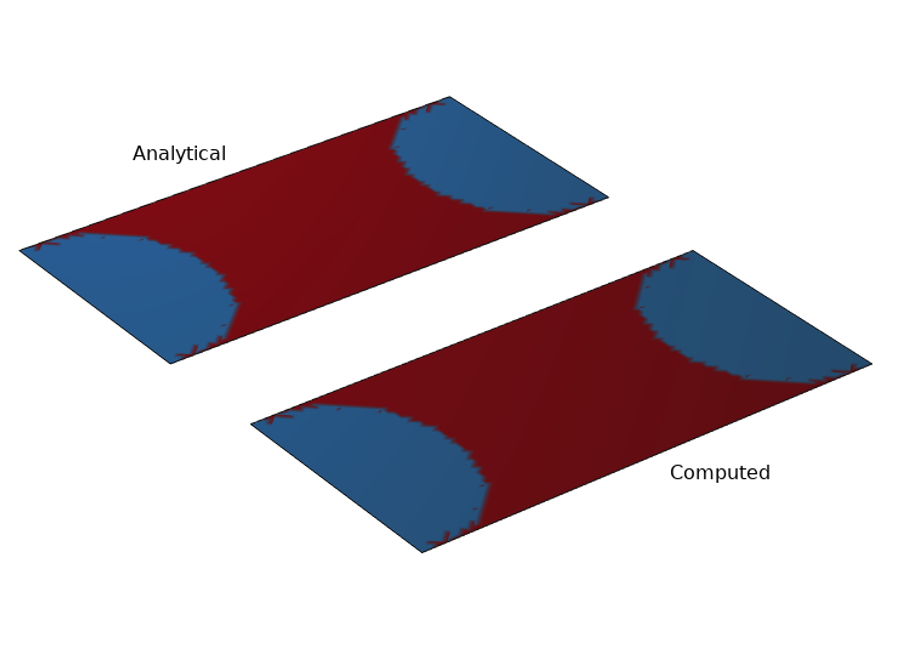
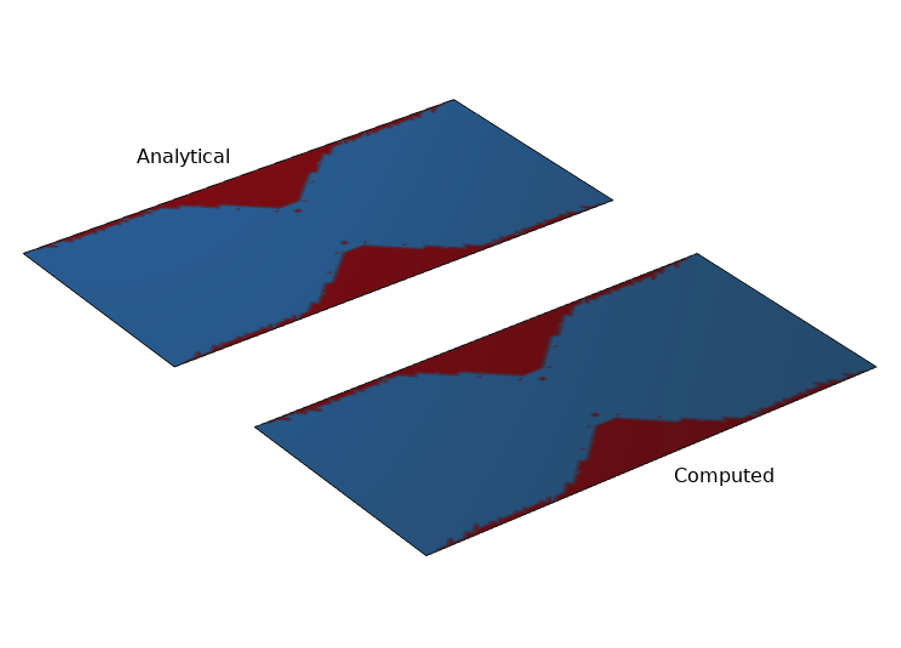
矩形膜的皱褶区域用暗红色显示。 左图使用的是各向同性材料,右图使用的是各向异性材料。这两幅图比较了分析结果与计算(数值)结果。
方形安全气囊的膨胀模型更符合实际情况,因此也更加复杂。该模型展示了使用线弹性材料的方形安全气囊在充气过程中的起皱情况。类似的,方形超弹性气囊的膨胀, 模型使用的是超弹性材料。
使用线弹性材料模拟的方形安全气囊。褶皱区域用暗红色显示。
另一个使用 膜 接口内置功能分析褶皱的示例是圆形膜的扭转模型。在该模型中,仅在圆形膜的内边施加了扭矩以产生褶皱。在这个示例中,可以观察到不同网格模式和离散度对褶皱模式的影响。
修正的本构关系
如上所述,COMSOL Multiphysics® 中的 褶皱 子节点使用的是修正变形张量公式。由于软件的灵活性,也可以使用第二种方法模拟褶皱:修正的本构关系。
第二个公式对皱褶区域的本构关系进行了修改。用于皱褶区域的应变能称为 松弛应变能,而用于绷紧区域的应变能也被称为 完全应变能。这种方法适用于所有各向同性超弹性材料模型,但为了简单起见,这里考虑的是 neo-Hookean 不可压缩材料。用主拉伸  和
和  表示的全应变能密度可写成
表示的全应变能密度可写成
主柯西应力  的计算公式为
的计算公式为
各方向的柯西主应力分别为
假设拉伸发生在第一主方向,褶皱发生在第二主方向。那么,在褶皱区域,以下等式必须成立:
该方程确定了褶皱区域的单轴应力状态,褶皱方向的应力变为零。根据褶皱方向上的零应力,可以得到主拉伸的褶皱条件:
因此,皱褶区域由以下不等式确定: 。在全应变能中插入根据主拉伸得到的褶皱条件,neo-Hookean松弛应变能的计算公式为
。在全应变能中插入根据主拉伸得到的褶皱条件,neo-Hookean松弛应变能的计算公式为
松弛应变能与褶皱方向的拉伸无关,这意味着该方向的柯西应力将自动变为零。
利用上述褶皱条件和能量密度,绷紧区域和褶皱区域的应变能密度可写成
可以证明,对于各向同性膜,修正的变形张量和修正的本构关系公式是等价的(详见参考文献1 )。然而,修正的本构关系法只适用于各向同性膜,而修正的变形张量方法更为普遍,也适用于各向异性膜。
比较 COMSOL Multiphysics® 中的计算公式
在不同厚度圆筒膜的起皱案例模型中,我们对两种公式进行了比较,发现结果是一致的。在该模型中,圆柱形膜首先被轴向拉伸,然后用水压进行充气。在充气过程中,外边界固定。
在 COMSOL Multiphysics® 中,可以通过选择 超弹性材料 特征的 用户自定义 选项来实现修正后的本构关系。请注意,此案例模型中 neo-Hookean 材料的应变能是专为不可压缩的各向同性膜编写的。在这个示例中,不应该使用内置的不可压缩公式,因为它增加了可能导致冲突的额外项。您可以在用户定义的超弹性材料中使用 可压缩 选项,该选项完全按照所编写的内容使用给定的应变能密度。
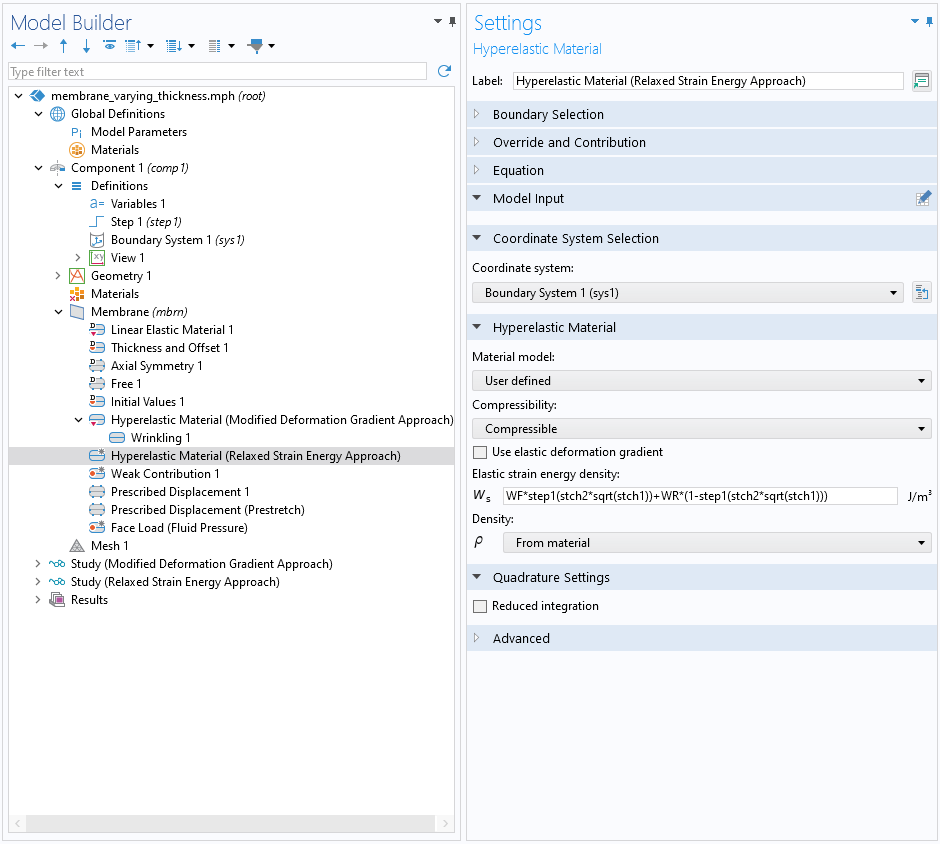
皱褶 子节点(使用修正后的变形张量公式)和用户定义的超弹性材料模型(使用修正后的本构关系公式)。
下图展示了采用两种方法模拟的不同水位高度下圆柱形膜出现的褶皱区域。结果表明,两种方法基本是等效的,并且得出的结果也相同。
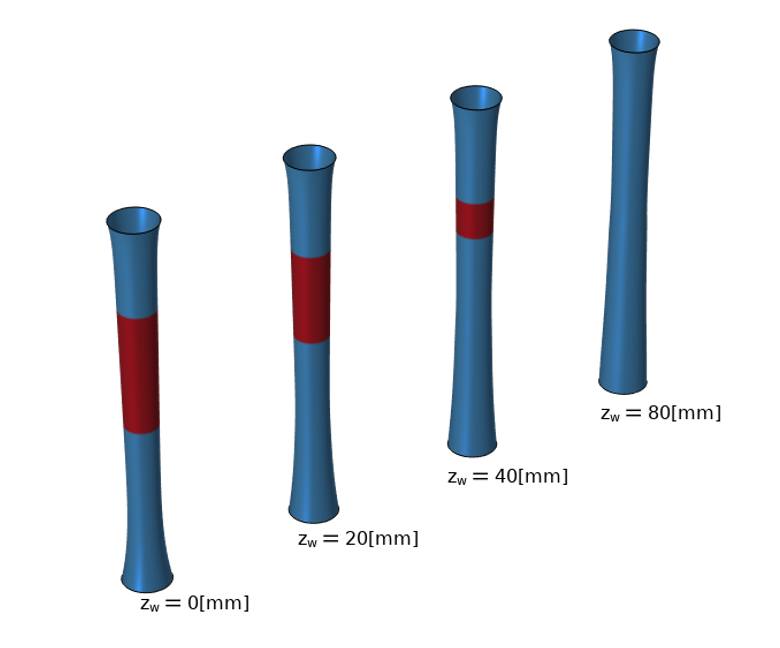
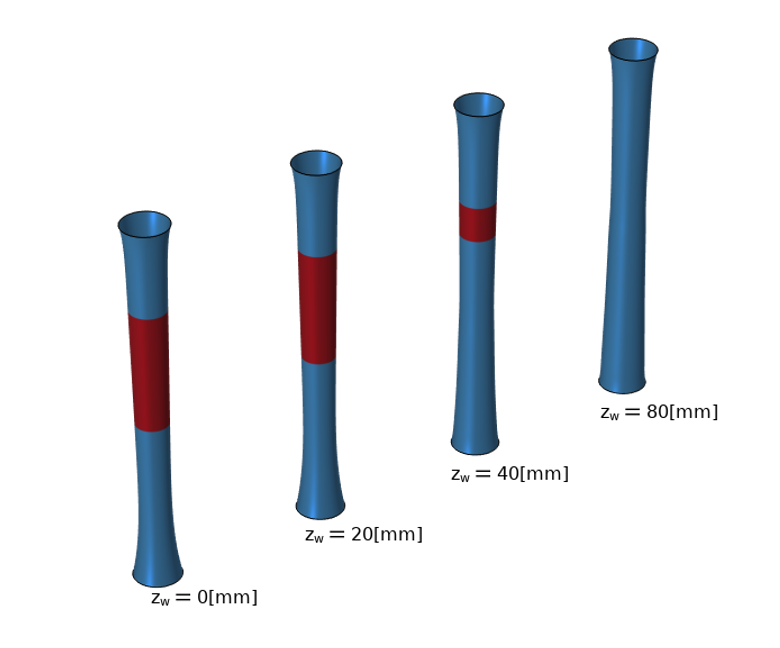
圆柱形薄膜的皱褶区域用深红色显示。左图使用的是修正的变形张量方法,右图使用的是修正的本构关系方法。注释显示了膜中不同的流体高度,膜高 80 mm,半径为 10 mm。
使用壳接口仿真
使用 壳 接口时,褶皱的处理方法基于分岔分析。由于压应力的作用,褶皱被认为是一种局部屈曲现象,因此需要进行后屈曲分析来模拟褶皱。使用后屈曲分析的优势是可以确定褶皱的波长和振幅。处理褶皱的第一步是进行预应力特征值分析,以确定潜在的屈曲模式。然后,选择几个具有适当比例的屈曲模式,并将其作为后屈曲分析的几何缺陷。
在 矩形片材的单轴拉伸模型中,通过使用壳的后屈曲分析来研究矩形薄板中褶皱的产生。下图显示了包含该分析所需节点的模型树。
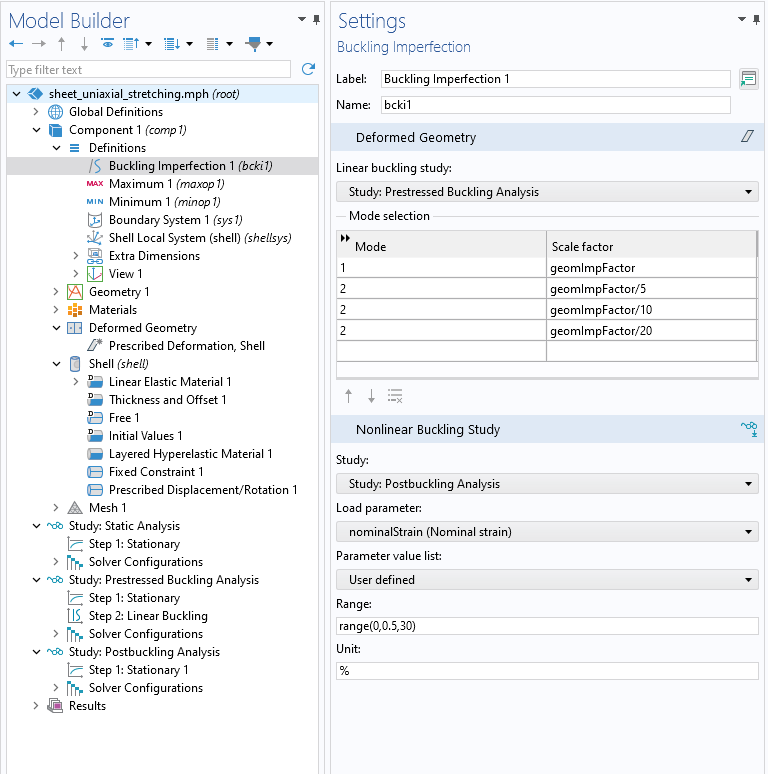
矩形片材的单轴拉伸模型的 屈曲缺陷节点和所需的研究
该教程模型的第一步是通过静态分析确定潜在的褶皱区域。在此阶段,矩形板受到单轴拉伸。目标是找到第二主应力变为压缩应力的区域。随后,使用 稳态 和 线性屈曲 研究步骤进行预应力屈曲分析。
对于后屈曲分析,可以使用 屈曲缺陷 节点,如上图所示。在该节点中,可以选择所需的屈曲模式数量及其相应的缩放因子。然后将这些缩放模式组合起来,作为几何缺陷应用于后屈曲分析。通过 屈曲缺陷 节点,还可以创建参数非线性屈曲研究。
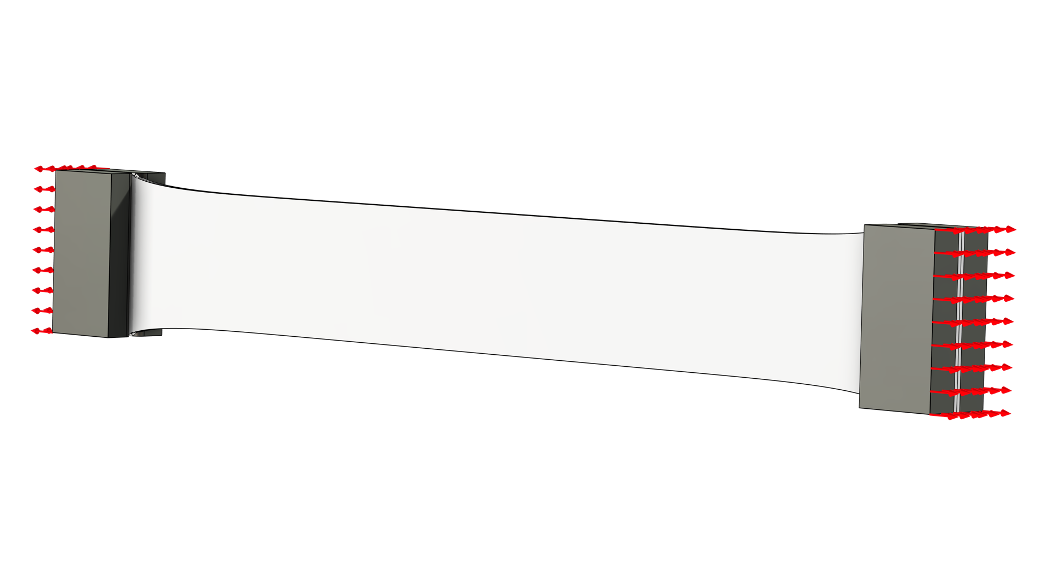
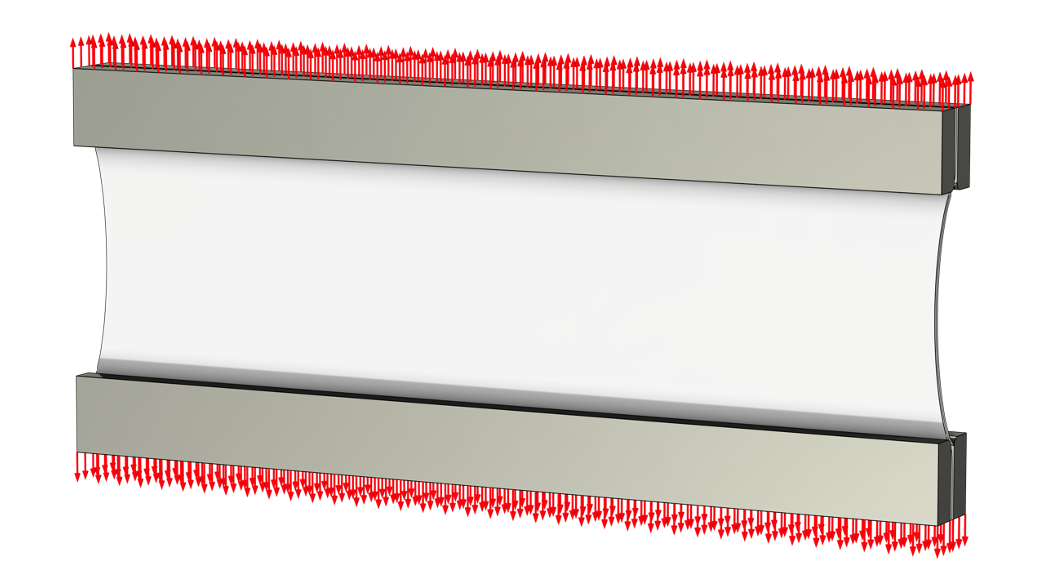
下面的动画显示了矩形片材在单轴应变增加时产生的褶皱,第二幅图则显示了沿褶皱方向中心线的褶皱幅度。起初,当矩形片材上的应变增加时,褶皱开始出现。褶皱幅度随着应变的增加而增大,直到达到临界值,之后开始减小。在达到某个应变值时,褶皱幅度变得非常小。
屈曲后分析中的褶皱。颜色方案显示了 褶皱振幅,其中蓝色代表负值范围,红色代表正值范围,绿色代表零位移。
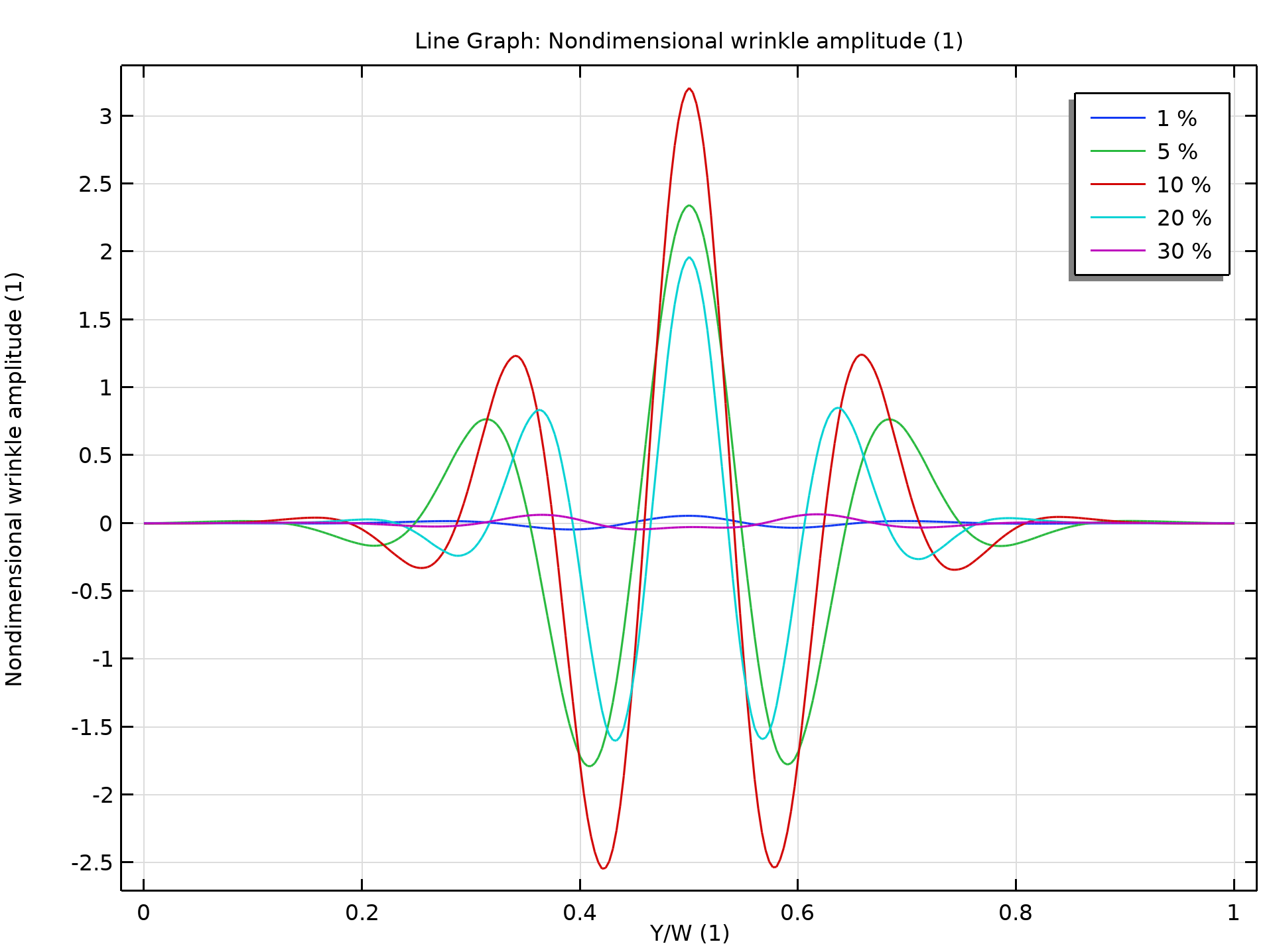
后屈曲分析中的皱褶振幅。
结语
如文中所演示的,您可以在 COMSOL Multiphysics® 中使用 膜 和 壳 接口模拟皱褶。可以通过修正变形张量或本构关系对皱褶进行膜分析。这种方法快速且计算效率高,能准确识别皱褶区域和应力分布。但是,它无法提供有关皱褶振幅和波长的信息。另一方面,皱褶的壳分析不仅耗时长,计算量大,还对几何缺陷输入敏感,但它能准确预测应力分布和皱褶区域,并能提供有关皱褶振幅和波长的宝贵数据。这两种分析类型各有优缺点,工程师可根据具体的建模要求选择其中一种分析类型。
参考文献
- A. Patil, Inflation and Instabilities of Hyperelastic Membranes, PhD thesis, Royal Institute of Technology (KTH), Stockholm, 2016.
- H. Schoop et al., “Wrinkling of nonlinear membranes,” Computational Mechanics, vol. 29, pp. 68–74, 2002; https://doi.org/10.1007/s00466-002-0326-y
机械系统中常常包含一些表现出非线性材料行为的部件。例如,密封件和垫圈中的大弹性变形、橡胶和生物软组织在承受循环载荷过程中的应变率依赖性和滞后性,以及金属中的弹塑性流动和蠕变。COMSOL Multiphysics® 软件及其附加的非线性结构材料模块包含 100 多个内置材料模型,可用于模拟高度复杂的材料行为。然而,这些模型(通常是现象学模型)有一个缺点,可能包含大量需要针对每种特定材料进行校准的材料参数,以获得准确的仿真预测结果。在今天的博客中,我们将介绍如何利用非线性最小二乘最小化方法,由从普通材料测试获得的实验数据对这些参数进行估计。
常见的材料测试
估计材料参数首先要获取相关实验数据。如上一篇博客所讨论的,相关数据在很大程度上取决于材料类型和最终应用中的预期载荷类型。例如,各向同性线弹性材料可以通过单轴测试进行表征。具有应变率和载荷-历史依赖性的材料则需要进一步的试验,如松弛、蠕变或不同应变速率下的循环试验。如果部件在高温和(或)不同的温度下工作,可能还需要考虑与温度相关的材料特性。
对于经历大变形的材料,即使材料行为是各向同性的,测试不同应力状态下的材料特性也很重要。与线弹性一样,虽然根据单轴测试校准超弹性模型很有吸引力,但在压缩或双轴载荷下对该模型进行预测,可能会产生意想不到甚至不稳定的材料行为。相反,校准橡胶类材料通常采用的试验组合包括单轴拉伸、纯剪切和等双轴拉伸试验。接下来,我们以一个橡胶薄板试样为例,来说明如何进行此类试验。
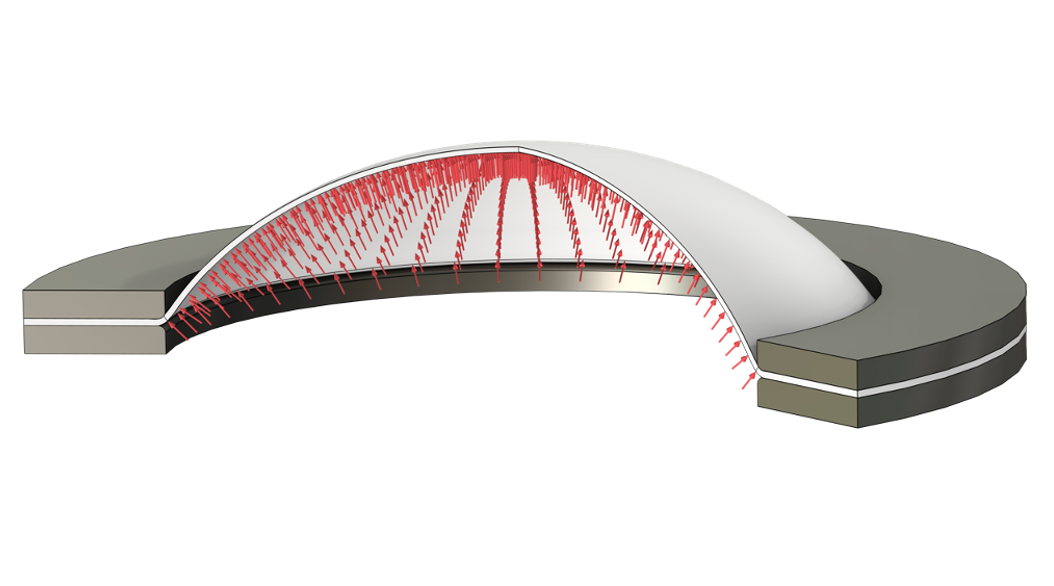
从左到右:橡胶薄板的单轴拉伸、纯剪切和等轴膨胀试验。红色箭头表示指定位移,在拉伸试验中表示施加的拉伸压力。
对于长宽比合适的试样,上述配置会在试样中心产生均匀的应力和应变状态。这些应力和应变可以通过可测量的量来估计,例如施加的位移和反作用力,或施加的压力和充气膜的曲率半径等。产生均匀的应力和应变状态的材料测试尤其适合进行参数估计,因为它们可以用单个单元建模,从而大大降低了计算成本。
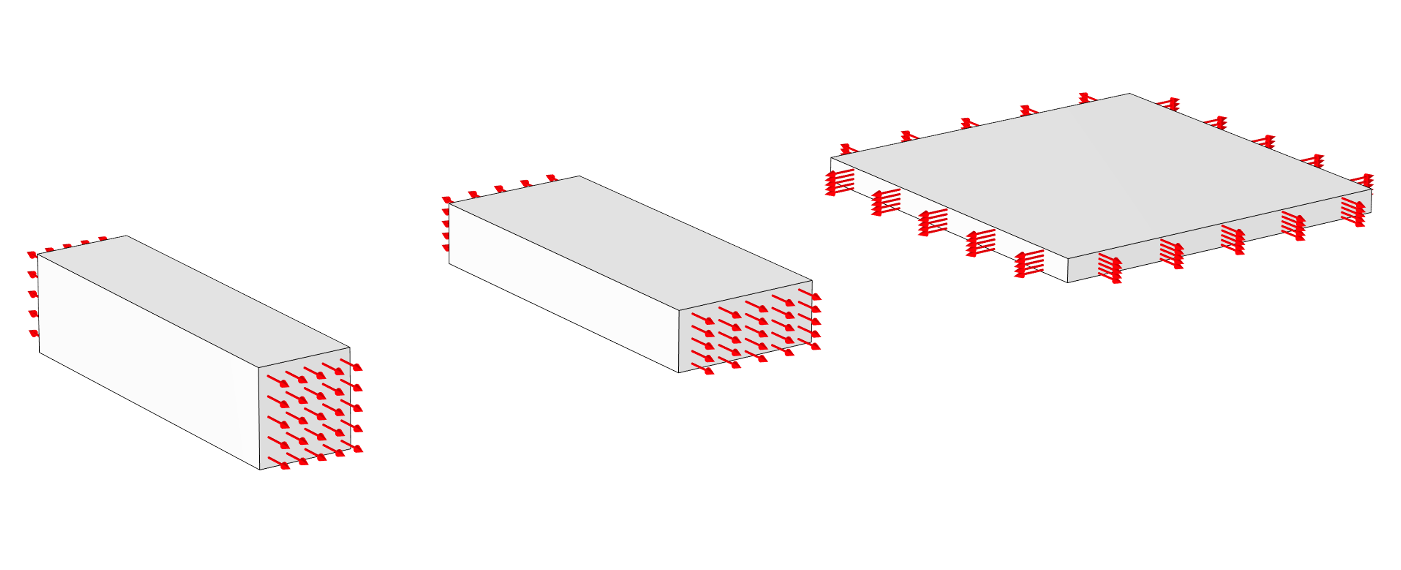
从左到右:等效均匀单轴拉伸、纯剪切和等双轴拉伸的载荷情况。
非线性最小二乘参数估计
在获得实验数据并选择好材料模型后,我们还需要选择一种优化算法,将当前的模型预测与实验数据进行比较,并更新材料参数,使差值最小。因此,寻找未知材料参数  相当于求解一个逆问题。我们用数学形式将其表示为一个加权最小二乘问题,
相当于求解一个逆问题。我们用数学形式将其表示为一个加权最小二乘问题,
式中, 是权重矩阵,
是权重矩阵, 是缺陷 或残余矢量,包含模型预测值
是缺陷 或残余矢量,包含模型预测值  与实验数据
与实验数据  之间的差值。模型预测可能明确或隐含地取决于材料参数,即
之间的差值。模型预测可能明确或隐含地取决于材料参数,即  ,
, 是正演问题的解。
是正演问题的解。
为了更好地说明最小二乘问题的不同组成部分,可以将二次形式展开为
式中,  是数据集的数量;
是数据集的数量; 和
和  分别表示数据集
分别表示数据集  的最小二乘误差和数据点数量;
的最小二乘误差和数据点数量; 和
和  分别表示模型预测值和实验数据。参数
分别表示模型预测值和实验数据。参数  表示实验的自变量,如时间或施加的拉伸。此外,我们假设 是一个对角矩阵,其分量为
表示实验的自变量,如时间或施加的拉伸。此外,我们假设 是一个对角矩阵,其分量为  ,其中
,其中  是比例因子,用于加权不同的数据点和数据集,并确保目标是无量纲的。最小二乘问题还可以通过参数的下限和上限进行扩展,用于排除参数空间中材料模型不稳定的非物理区域。
是比例因子,用于加权不同的数据点和数据集,并确保目标是无量纲的。最小二乘问题还可以通过参数的下限和上限进行扩展,用于排除参数空间中材料模型不稳定的非物理区域。
在 COMSOL Multiphysics® 中,有多种优化算法可用于求解最小二乘问题。大多数情况下,目标是参数的良好函数,使用基于梯度的 Levenberg–Marquardt 算法可以高效地求解这个问题。简单来说,Levenberg–Marquardt 算法通过在远离最小值时交替使用梯度下降方向的更新步长,以及在接近最小值时交替使用 Gauss–Newton 步长来迭代更新参数,从而实现近似二次收敛。更新算法中的一个基本量是雅可比因子
被用来衡量模型预测对材料参数变化的敏感度。原则上,可以在优化求解器中对雅可比进行分析估计;但是,如果问题高度非线性,且正演模型估计成本较低,则雅可比的有限差分近似通常在稳健性和效率方面更为可取。当无法正确计算雅可比时 —例如,如果目标是无差别的 — 无梯度二次近似约束优化算法(BOBYQA)是一种无需显式计算导数的替代算法。
还可以选择用 COMSOL Multiphysics® 中的 Levenberg–Marquardt 求解器计算置信区间以及协方差矩阵,作为参数估计不确定性的度量。如果您希望将实验数据中的方差传播到材料参数中,这将特别有用。要了解更多信息,请参阅通过协方差分析进行参数估计教学模型。
非线性材料参数估计示例
在上一篇博客中,我们探讨了如何利用两种常见载荷情况下应力-应变曲线的解析表达式来估计超弹性模型的材料参数。然而,这种方法无法轻松扩展到非弹性材料模型,因为非弹性材料模型通常不存在封闭解析解。作为替代,我们可以利用 COMSOL Multiphysics® 中的内置材料模型。对于两种载荷情况:超弹性和大应变黏弹性,我们将演示如何使用这种方法进行参数估计。
超弹性 Ogden 模型的参数估计
在第一个示例中,我们将根据代表软质弹性体的单轴拉伸、纯剪切和等双轴拉伸数据校准超弹性 Ogden 模型。数据如下。
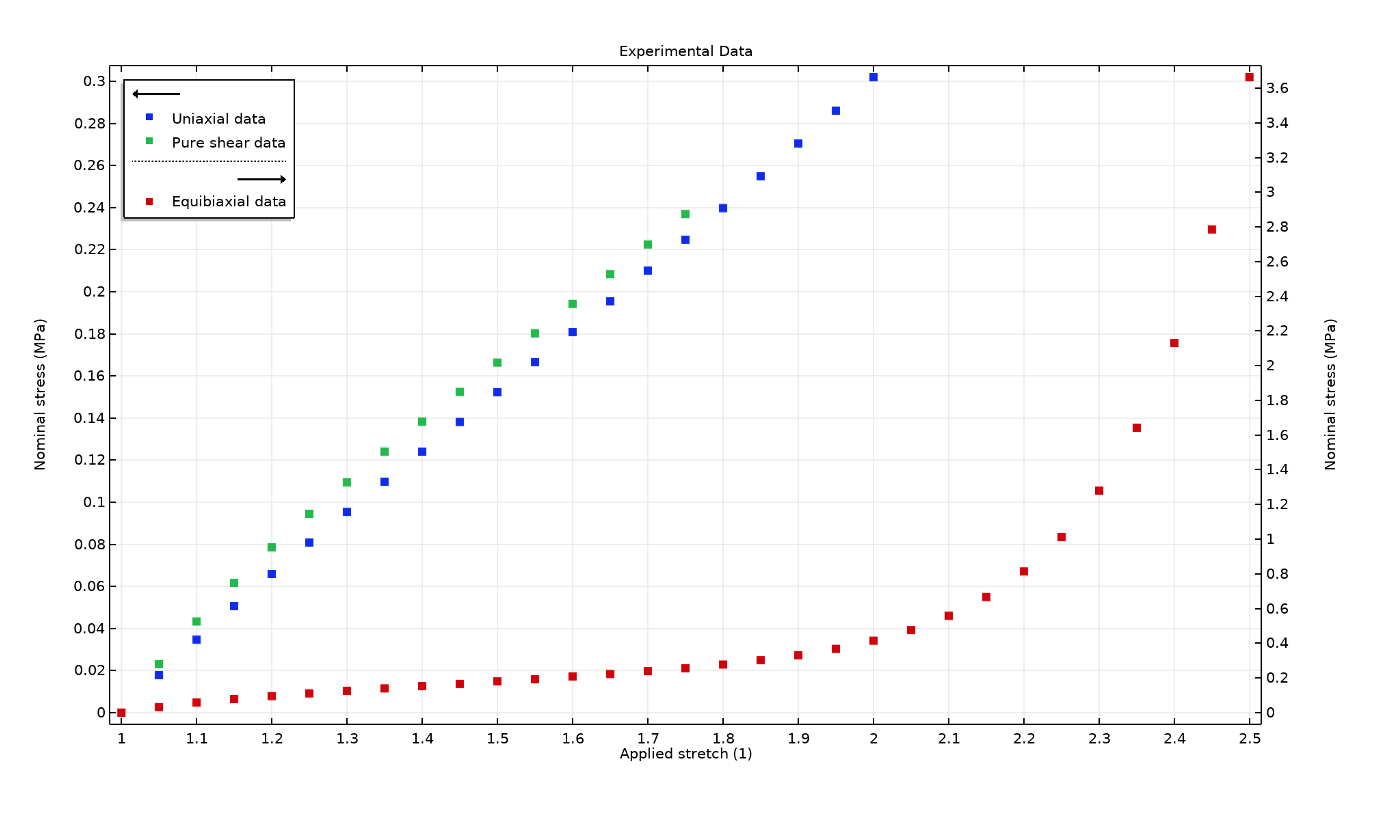
代表软质弹性体的单轴拉伸、纯剪切和等轴拉伸数据。请注意,由于等轴应力比其他量大得多,因此绘制在第二个 y 轴上。
假设弹性体是不可压缩的,因此 Ogden 模型中的应变能密度为
这里考虑了应变能量密度函数中的两个项,因此问题包括求解 4 个未知材料参数  ,如下图所示。
,如下图所示。
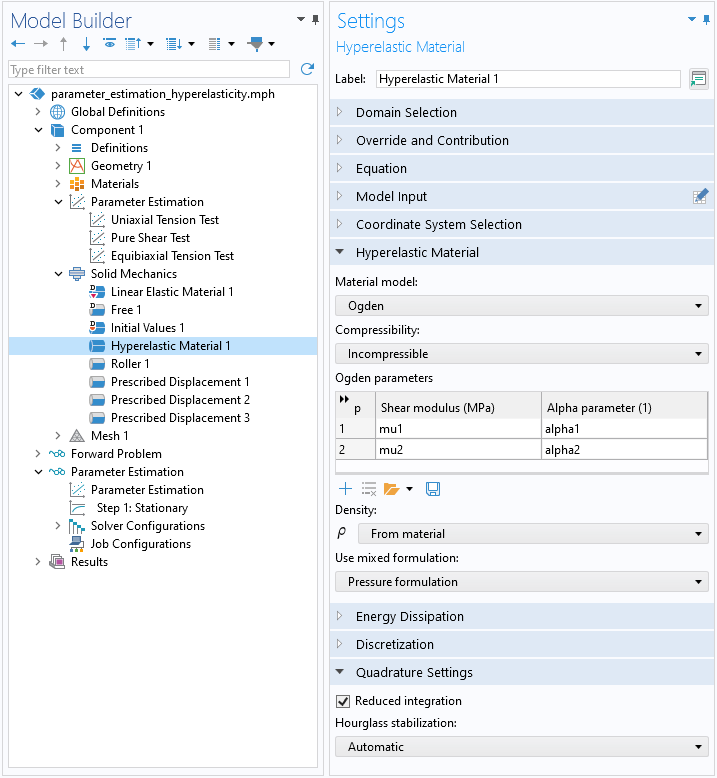
不可压缩 Ogden 模型的两个项的设置。请注意,由于载荷是均匀的,因此可以使用减缩积分来降低计算成本。
设置好材料模型后,可以将数据集导入结果表,并使用全局最小二乘目标 功能将数据集与相应的模型表达式连接起来。下图显示了根据单轴数据形成的最小二乘目标的设置。模型表达式 栏中使用的变量 comp1.P_ua 被定义为标称应力 solid.PxX 内置变量的体积平均值。
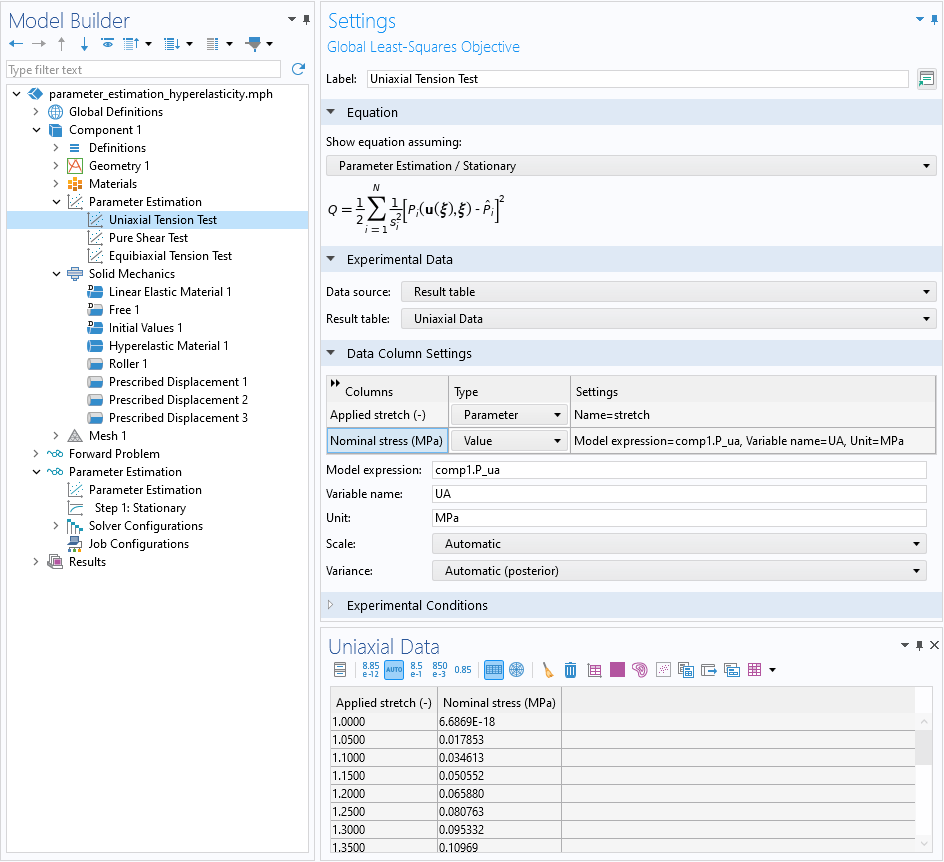
与单轴拉力数据相关的 全局最小二乘目标功能设置。
在参数估计 研究步骤中,我们添加了三个目标,并指定了要估计的材料参数。在估计参数 表中,mu1 和 alpha1 被限定为正值,而 mu2 和 alpha2 被限定为负值。这些限定确保了材料模型满足 Ogden 模型的已知稳定性要求  。
。
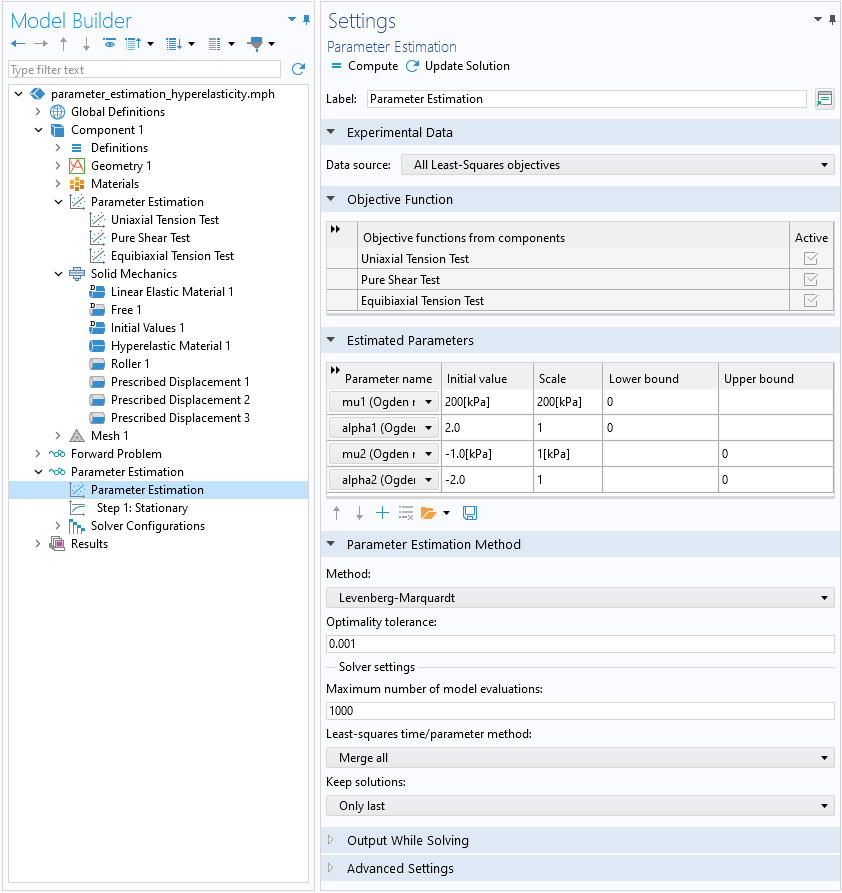
参数估计研究步骤的设置。
在优化求解器的每一次迭代中,都可以通过比较当前模型预测结果与实验数据的曲线图来监控求解进度。从下面的动画中可以看到,Levenberg–Marquardt 算法迅速改进了单轴和纯剪切模型的预测结果,并在多次迭代后改进了高度非线性的等轴响应。
黏塑性 Bergstrom–Boyce 模型的参数估计
在下一个示例中,我们将考虑更复杂的 Bergstrom–Boyce 黏塑性聚合物材料模型,它同时表现出应变率、载荷历史和温度相关性行为。以下是室温下两种不同应变率的循环单轴拉伸和压缩试验的代表性应力–应变曲线。
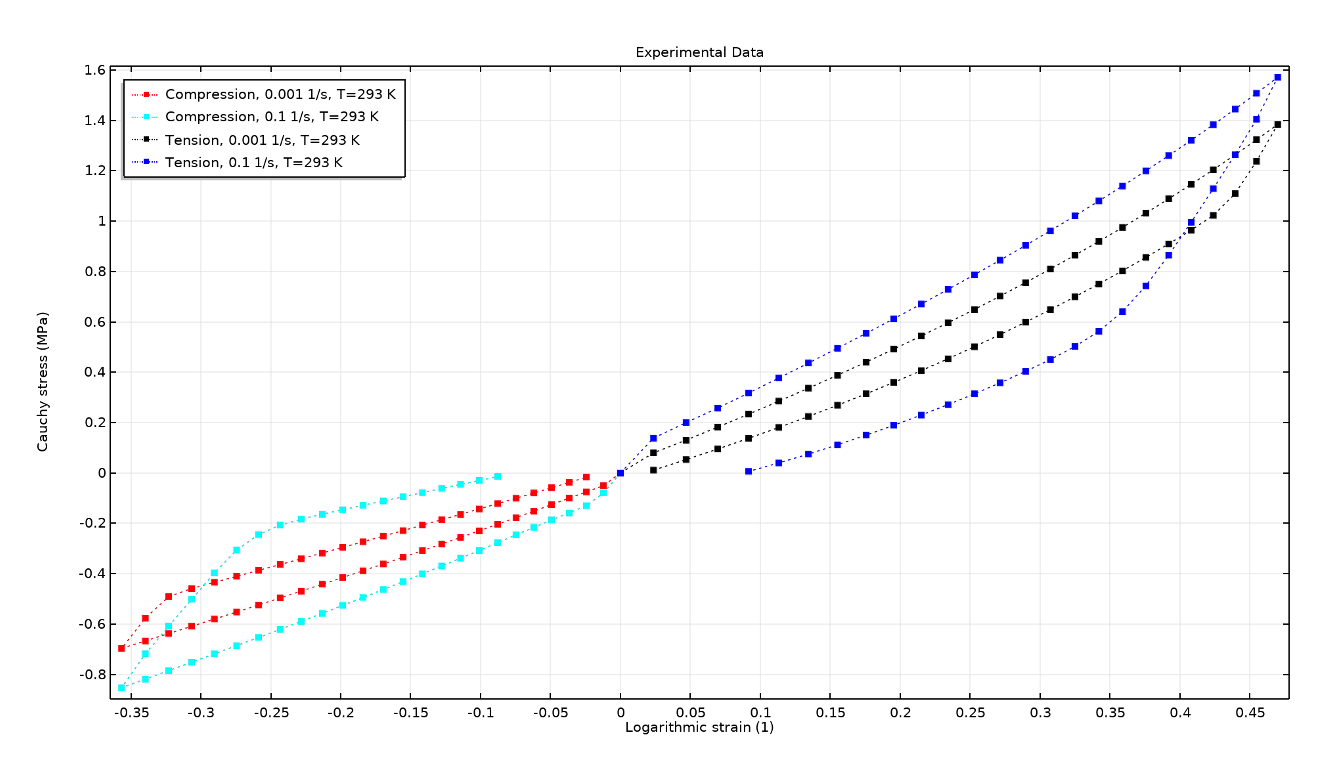
在两种不同应变率(0.1%/s和 10%/s)条件下,黏塑性聚合物材料模型典型的单轴拉伸和压缩加载–卸载曲线。
COMSOL Multiphysics® 6.2 版本超弹性材料 功能中的聚合物黏塑性 子节点包含 Bergstrom–Boyce 材料模型。在这里,父超弹性模型定义了一个弹性平衡网络,而子节点添加了一个平行的非平衡网络,其中包含一个弹性和非弹性单元。在本例中,我们使用几乎不可压缩的 Arruda–Boyce 应变能密度对弹性单元进行建模,并在黏塑性流动中包含应变和应力硬化。此材料模型总共包含 6 个独立的材料参数, :平衡网络的剪切模量,
:平衡网络的剪切模量, ;链段数量,
;链段数量, ;非平衡与平衡网络之间的能量系数,
;非平衡与平衡网络之间的能量系数, ;黏塑性流动速率系数,
;黏塑性流动速率系数, ;应变硬化指数,
;应变硬化指数, ;应力硬化指数,。
;应力硬化指数,。
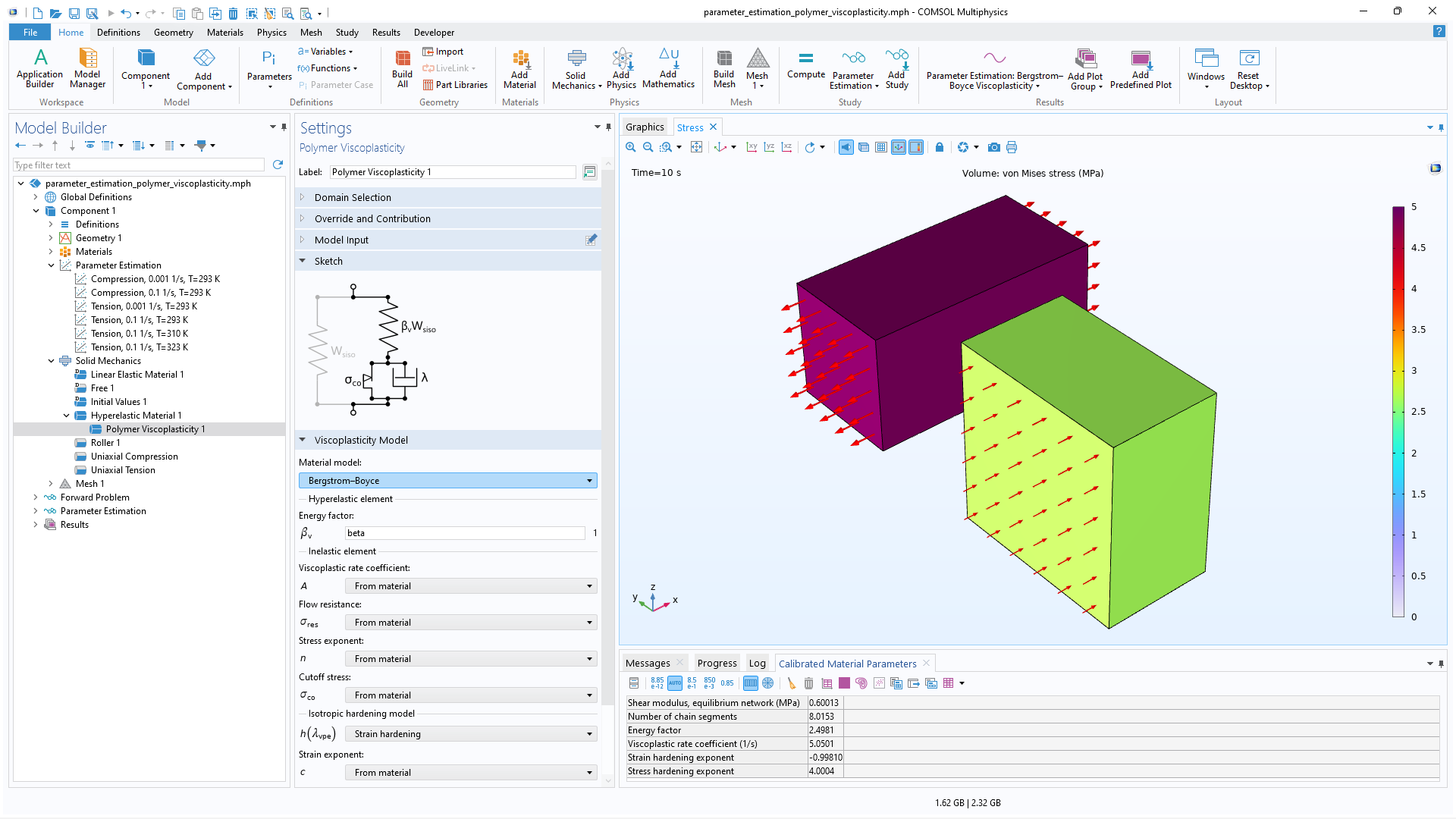
聚合物黏弹性功能中 Bergstrom–Boyce 模型的设置。图形窗口显示了单轴压缩和拉伸试验的单元模型。
现在,我们可以用类似于超弹性问题的方法来设置和求解最小二乘问题。从下面的动画中可以看到,尽管优化求解器需要进行约 12 次迭代才能达到收敛,但经过约 5 次迭代后,就已经得到了直观上令人满意的解。这是因为 Levenberg–Marquardt 求解器的默认终止条件是检查参数增量或缺陷矢量与雅可布角之间的最大角度是否小于给定的优化容差。在优化求解器的设置中,可以根据缺陷矢量的相对变化,选择加入一个额外的终止准则,如果求解器在参数空间中达到一个相对平滑的局部最小值,而目标函数的改进很小,那么这个终止准则就会非常有用。不过,默认的终止标准通常比基于缺陷减少的终止标准更稳健。
测试材料模型的稳定性
在估计出非线性材料模型的参数后,最好对材料模型进行测试,以确保其数值稳定性。在此系列博客的第二部分,我们将详细介绍这一主题。
结论及进阶学习
在这篇博客中,我们演示了如何在 COMSOL Multiphysics® 中根据典型材料测试数据估计非线性结构材料模型的参数。所介绍的方法通常适合任何类型的材料模型和材料测试数据。
要查看详细的分步说明,尝试自己对不同的模型进行参数估计,请参阅下列 COMSOL 案例库模型:
人们使用药丸治疗疾病已经有数百年的历史了,有些记载甚至可以追溯到古埃及。然而,直到 19 世纪,William Brockedon 和他的“在模具中用压力塑造药丸、锭剂和黑铅”的专利机器才将制药压片工艺大大现代化,该机器可以将粉末压缩成片剂(参考文献1)。今天,粉末压制法由于其高灵活性、高材料利用率,以及比其他制造方法更好的质量控制而被广泛用于制药行业。
这篇博客,我们将使用自 COMSOL Multiphysics® 软件 6.0 版本开始提供 Capped Drucker-Prager 模型探索制药压片工艺。
Capped Drucker-Prager 模型
由粉末生产药片的过程,也称为压片,包括三个主要阶段:
- 模具填充:将粉末输送到模具型腔中。
- 压制:通过上、下冲头将粉末压入模具内,制成片剂。
- 顶出:药片由下冲头从模具中顶出。
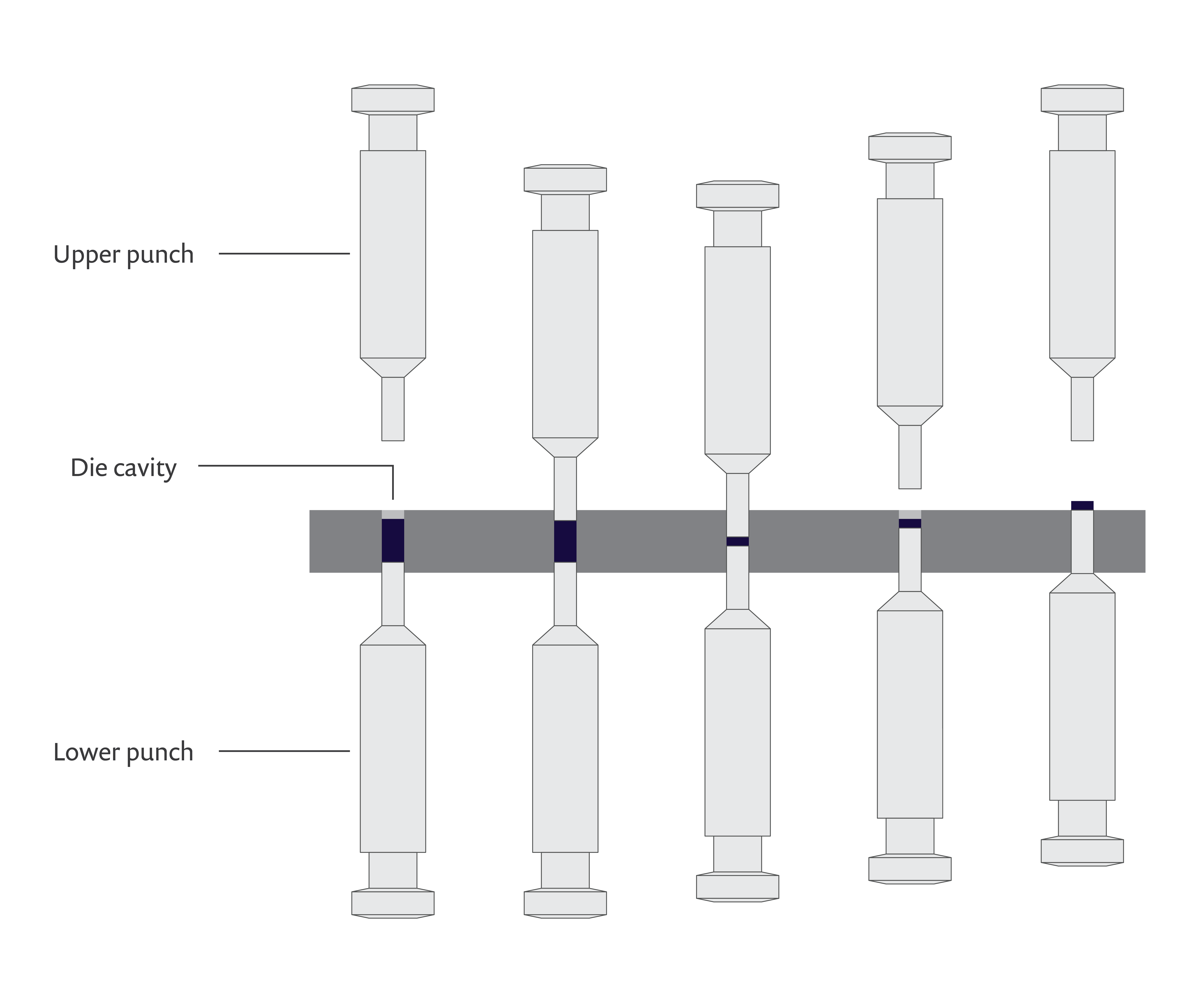
药片制造过程示意图。
我们将使用 Capped Drucker-Prager 模型研究压制阶段,评估模具的应力、应变和密度分布以及冲力对轴向压制的影响。
用于粉末压制过程有限元分析的本构材料模型可分为两种主要类型:
- 多孔材料模型——用于中、低孔隙率粉末的压制
- 颗粒材料模型——用于高孔隙率粉末的压制
COMSOL Multiphysics 中提供的 Fleck-Kuhn-McMeeking 材料模型是多孔材料模型的一个示例,而 Capped Drucker-Prager 塑性选项是颗粒材料模型。Capped Drucker-Prager 塑性模型经常用于模拟药物粉末压制,因为需要的材料参数可以通过实验数据轻松表征和确定。在这个示例中,我们将使用 Capped Drucker-Prager 塑性模型模拟被称为微晶纤维素 (MCC) 的高孔隙率粉末的压制。请注意,材料属性被认为与密度有关,并且考虑了粉末和模具之间的摩擦。
注意:如果你对如何使用 COMSOL Multiphysics 中的 Fleck-Kuhn-McMeeking 和 Gurson-Tvergaard-Needleman 模型来模拟铝粉末压制感兴趣,请阅读博客:利用多孔塑性模型模拟粉末压制。
在 COMSOL Multiphysics® 中模拟粉末压制
使用 COMSOL Multiphysics 中的非线性结构材料模块(结构力学模块或 MEMS 模块的附加模块),我们可以从定义几何结构开始分析。模型几何结构包括工件,本文的示例中是微晶纤维素(MCC)和模具。模型设置所需的两个冲头是固定的下部冲头和上部移动的冲头。下冲头被建模为工件底部边界上的固定轴向位移,上冲头被建模为沿轴向的规定位移。由于模具的刚性特性,它没有被明确地建模。
有关这个模型设置的更多信息,请参阅模型教程文档。在这篇博客中,我们将直接进入模拟结果。
COMSOL Multiphysics®中的仿真结果
为了评估粉末的性能,我们来讨论仿真结果。在压制过程开始时,顶部表面的 von Mises 应力较高,从而在工件中形成较大的应力梯度。随着压制的进行,应力梯度减小,可以在底部观察到较低的应力环。
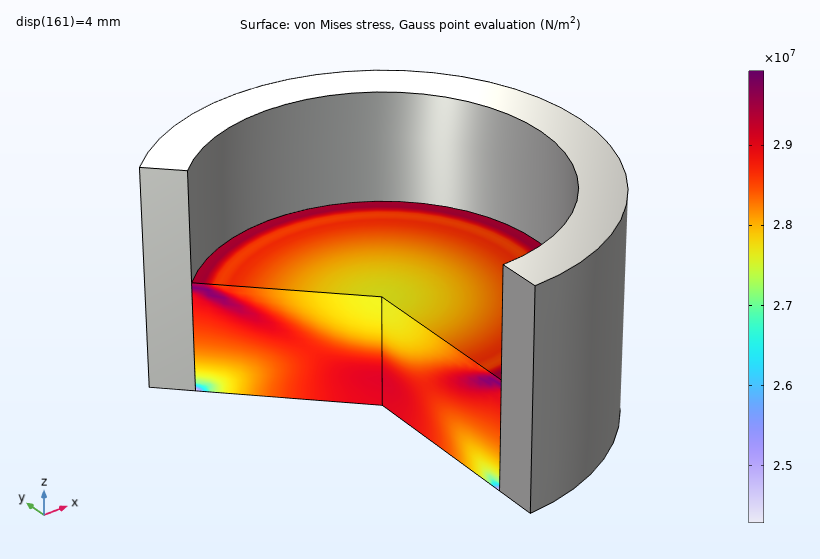
压制过程结束时的 von Mises 应力。
下图显示了粉末压制结束时的体积塑性应变。可以看到,从底面到顶面的体积塑性应变有很大的变化。最大压缩塑性应变出现在顶部。
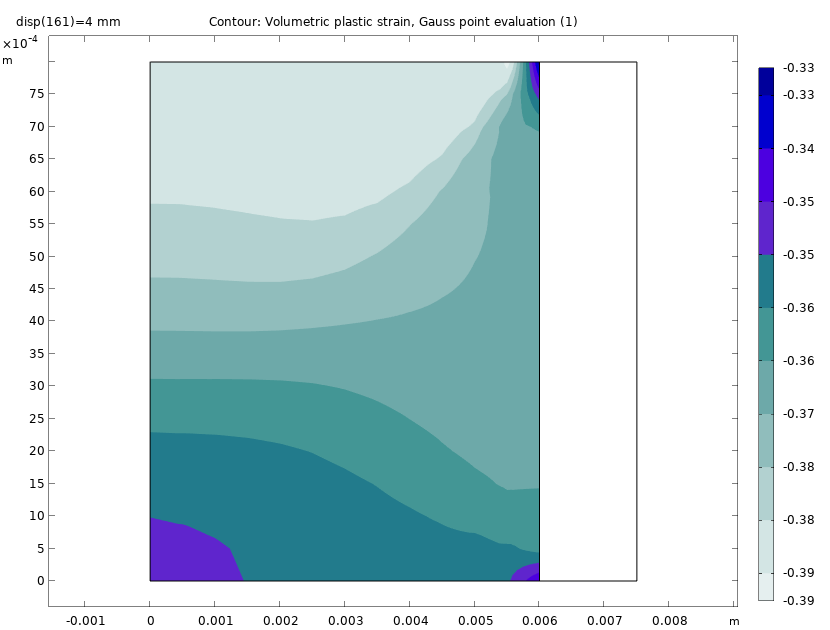
压制过程结束时的体积塑性应变。
我们也可以很容易地评估不同阶段压制的相对密度分布。在压制的所有阶段,高密度区形成在顶端,而低密度区形成在底端,直到压制过程结束时密度达到片剂的最终密度。由于摩擦,在粉末模具中可以观察到不均匀的密度。
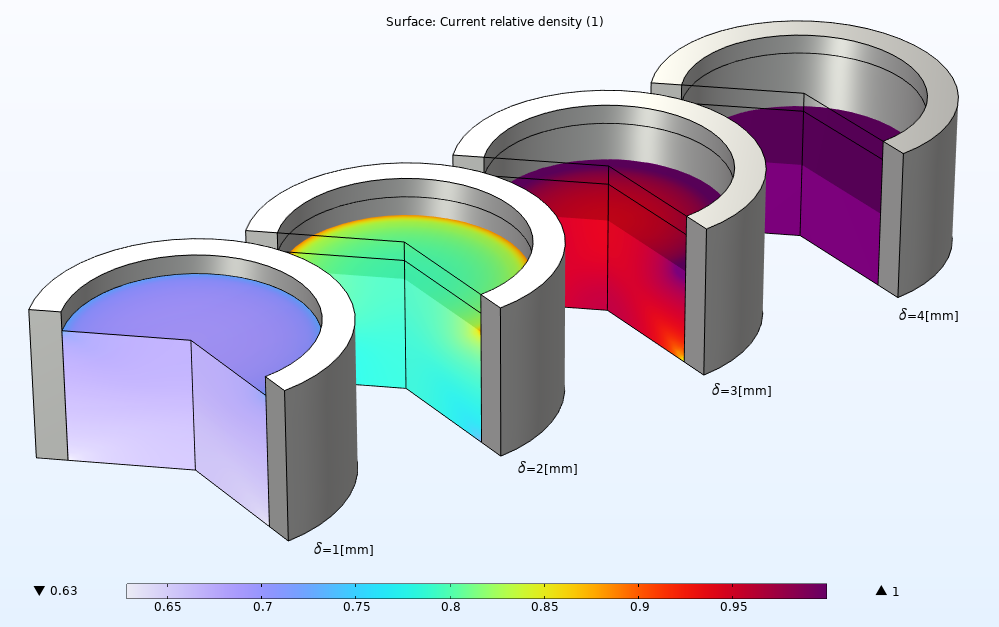
一组四个粉末的压制图,显示药物压制过程中不同阶段的相对密度。
最后,模拟结果还显示了粉末压制过程中冲力与轴向压制的关系。可以看到,屈服发生在过程的早期阶段。
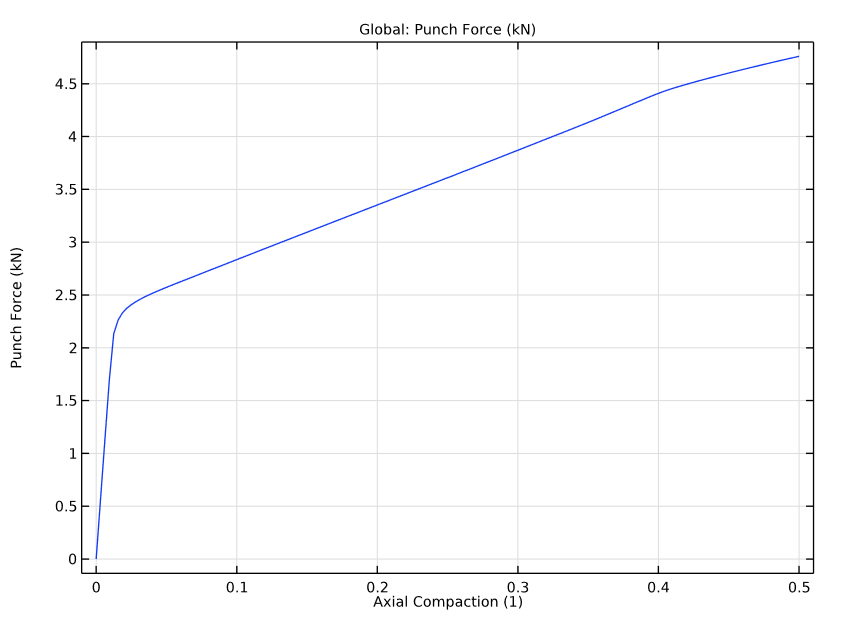
冲头力与轴向压制。
结束语
在这篇博客中,我们研究了如何在 COMSOL® 软件中模拟制药压制工艺。我们使用最流行的模型之一—— Capped Drucker-Prager 塑性模型来模拟药物粉末的压制过程,该模型通常被用于模拟药物粉末压制,因为它能够表示与压制过程相关的各种现象。如果您想熟悉药物粉末压制过程,请尝试自己动手建立制药压制工艺的教程模型:
更多资源
- 如果您想进一步练习您的建模技能,可以查看以下这些相关的教程模型:
- 两阶段粉末压制工艺
- 旋转法兰组件的粉末压制
- 结合 Fleck-Kuhn-McMeeking 模型和 Gurson-Tvergaard-Needleman 模型的杯形件的粉末压制
参考文献
- “Tablet (pharmacy),” Wikipedia, Wikimedia Foundation, 15 July 2022; https://en.wikipedia.org/wiki/Tablet_(pharmacy)
- A. Baroutaji, S. Lenihan, and K. Bryan, “Combination of finite element method and Drucker-Prager Cap material model for simulation of pharmaceutical tableting process,” Material Science and Engineering Technology, vol. 48, no. 11, 2017.
- L. H. Han et al., “A modified Drucker-Prager Cap model for die compaction simulation of pharmaceutical powders,” International Journal of Solids and Structures, vol. 45, pp. 3088–3106, 2008.
您知道应该使用 COMSOL Multiphysics® 软件的哪些附加产品来模拟压电设备吗?这取决于系统中包含的材料类型以及您要在分析中使用的特定功能。今天我们为您详细介绍一下这些不同的产品,看看它们能提供什么功能。
压电接口
压电 接口将固体力学 和静电 接口与压电现象建模所需的本构关系相结合。它可以模拟正向压电效应和逆向压电效应。压电耦合可以使用应变-电荷或应力-电荷形式来表述。
结构力学 &声学模块 产品分支中的三个模块提供了用于模拟压电性的功能:
- 声学模块
- MEMS 模块
- 结构力学模块
下面的图说明了这些模块提供的与压电建模相关的最常用功能。
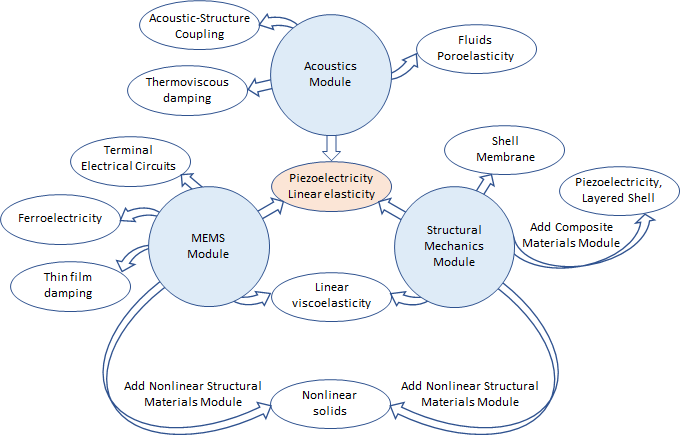
用于压电建模的产品概述
声学模块
声学模块包含用模拟波的产生和传播的专用工具:
- 流体
- 线弹性材料
- 多孔介质
- 压电材料
它是唯一可以提供捕获流体和多孔材料中的波行为的内置功能的产品。声学模块允许您使用结合 压力声学、固体力学 和静电学 接口的预定义多物理场耦合对声-压电相互作用的问题进行建模。
这类问题的典型应用通常分为两类:
- 使用压电换能器作为发射器将声音辐射到周围的流体
- 使用压电换能器作为接收器来检测来自周围流体的声音
您可以同时将压电设备建模为发射器和接收器,如下面的教学案例中所示:
用于传输和接收声音的压电换能器。
当流体并非问题主要关注问题的场景下,您可能仍希望在模型中包含流体带来的热视觉损失,方便研究 MEMS 结构的阻尼振动。有关这方面的示例您可以参考下面的几个教程模型:
添加结构效果
当模型中包含非线弹性材料的固体时,您需要使用结构力学模块或MEMS 模块。每个模型本身都支持线性黏弹性材料模型,包括广义 Maxwell、标准线性实体 (SLS) 和 Kelvin-Voigt。黏弹性材料可用作复合压电换能器的背衬层或用于结构的任何部分以阻尼振动,如带约束层的阻尼垫和黏弹性结构阻尼器教学模型中所示。
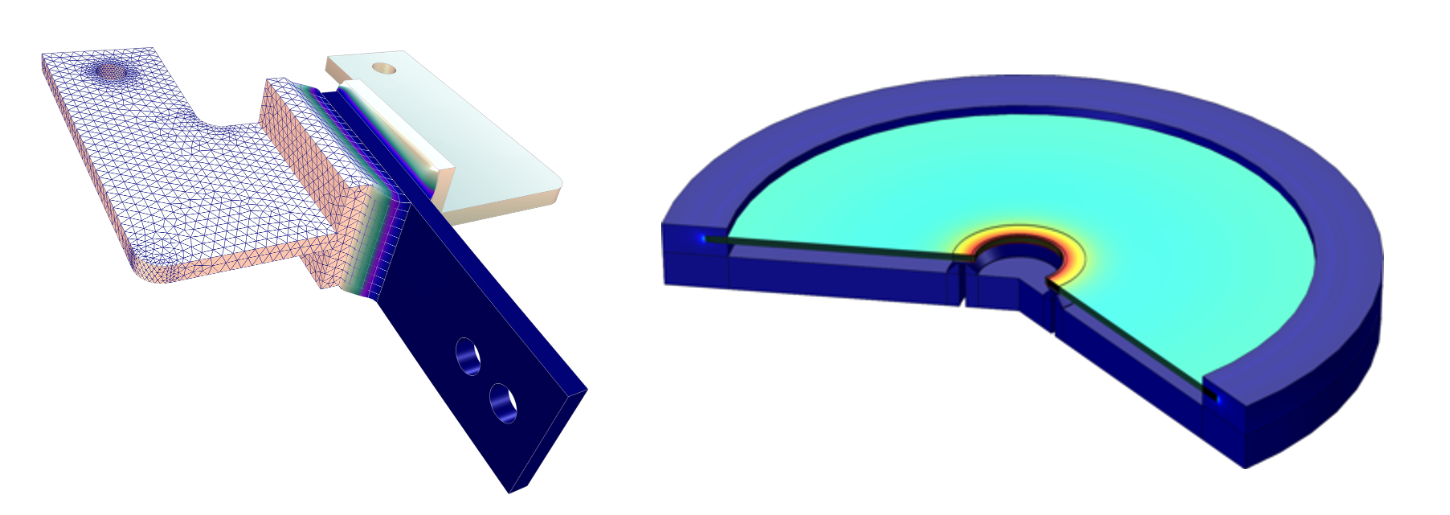
黏弹性结构阻尼器(左)和压电阀模型(右)的网格和位移结果。
如果材料具有需要考虑的非线性应力-应变关系,那么还需要使用非线性结构材料模块。它是结构力学和 MEMS 模块的附加组件,并通过对非线性材料建模的支持对其进行了扩展,例如超弹性、蠕变、塑性和黏塑性。压电阀教学模型中对此进行了示例说明。
MEMS 模块
MEMS 模块包括一个 终端 功能,允许您将压电设备连接到电路。电路可用于激励换能器以及接收检测到的信号。终端 功能还能够计算压电装置的集总参数,如计算复合压电换能器和散射参数(S 参数)。通过激活手动终端扫描,您可以对终端运行参数化扫描并获得散射参数矩阵。


复合压电换能器的电纳水平(左)和由陶瓷材料制成的致动器的不同值的极化磁滞曲线(右)。
MEMS 模块还提供薄膜阻尼功能,可用于对相对移动的两个结构之间的薄流体层中的阻尼进行建模。它通常被称为挤压膜阻尼或滑膜阻尼,这取决于结构的运动是垂直还是平行于膜平面。这个特征既可作为 固体力学 接口中使用的薄膜阻尼 边界条件,也可以作为独立的薄膜流 接口,与固体力学 物理场接口耦合,如 瞬态弹流润滑挤压油膜相互作用的基准模型所示。
MEMS 模块中包含的另一个相关功能是 铁电弹性 接口。当材料表现出自发极化时,我们可以使用该接口模拟处于铁电相的压电材料。铁电材料表现出非线性极化行为,例如大施加电场下的滞后和饱和。有关这方面的一个例子,可以参看 压电陶瓷的磁滞现象模型。
结构力学模块
结构力学模块包括有效分析薄结构的特征,例如,通过使用壳 或膜 接口。当您想要使用压电、多层壳 特征时,您将需要使用结构力学模块和复合材料模块。此特征将多层壳 接口与多层壳中的电流 接口相结合,从而能够以非常经济的方式对薄层结构中的压电效应进行建模,如多层壳中的压电现象模型教程所示。
中间嵌入压电层的多层外壳。压电层(彩色线框图)和金属层(彩色图)中显了轴向压缩和平面外位移。
总结
总而言之,当单独为压电器件建模并且器件仅包含压电材料和线弹性材料时,您可以使用声学模块、MEMS 模块或结构力学模块。
对于振动和波动问题,只要流体或多孔介质是系统的一部分,或者需要捕获热黏性阻尼以准确模拟 MEMS 器件的振动,就需要使用声学模块。如果包含线性黏弹性材料,则需要 MEMS 模块或结构力学模块。对于由非线性结构材料组成的器件,您需要使用非线性结构材料模块,该模块可以添加到 MEMS 模块或结构力学模块。
MEMS 模块可让您访问 终端 功能并将压电换能器连接到外部电路。薄膜阻尼特征可用于捕获流体薄层中的阻尼,用于移动微结构。它还允许您模拟压电材料的铁电效应。
结构力学模块提供了高效的建模功能,例如壳 和膜 接口。当添加了复合材料模块时,它还提供了压电、多层壳 特征。
如果您已经拥有提供压电特性的声学模块或结构力学模块,那么 AC/DC 模块还可以让您访问端子、电路 和铁电 特征。
当然,这里讨论的内容并未涵盖可以使用压电材料的所有可能场景。例如,使用压电驱动器对可调消失模腔体滤波器进行建模就需要使用 RF 模块。
下一步
想要与技术工程师讨论您的特定应用程序或更深入地了解这些模块中的任何一个吗?欢迎点击下面按钮与我们联系:
旋转木马、烟花和游乐场设备只是纪录片 How it’s made 中重点介绍的一部分产品。其中,有一集特别讲述了高尔夫球是如何制作的。这是一个令人着迷的过程,包括橡胶板、钢桶、压模机等等。看完这集视频后,我受到了启发,想学习更多关于高尔夫球技术的知识。在今天的博文中,我们将探讨高尔夫球的演变历史以及仿真在未来高尔夫球设计中的作用。
译者注:How it’s made (中译名:《制造的原理》/《造物小百科》)是美国探索频道的科普纪录片,涵盖了几乎所有的制造技术。
高尔夫球的演变
全球每年约生产12 亿个高尔夫球,它们有多种风格和设计,包括:
- 单层球,仅由一种材料制成,以 Surlyn® 树脂为代表。常被用于小型高尔夫球场和练习场。
- 双层球,具有实心橡胶芯和塑料外壳,是普通高尔夫球手的首选。
- 三层球,包含内核芯、软橡胶套和外层。想要更好地控制击球的经验丰富的高尔夫球手会使用这种球。
- 四层球,由三层橡胶层和一层硬质外层制成,它们比大多数高尔夫球更昂贵,并且通常由挥杆快速的专业人士使用。
- 五层球,由聚氨酯橡胶包裹着四层橡胶层,相对较新,是职业高尔夫球手的热门选择。

一根 7 号铁球杆和一个双层高尔夫球。
尽管这五种主要类型的高尔夫球在很多方面有所不同,但它们有一个共同特点:圆圆的球表面上布满了凹痕。然而,也会有例外的情况。正如我们今天所知道的,高尔夫球已经经历了许多设计上的改变。下面,我们简要地探讨高尔夫球发展的五个不同阶段。
1. 木制球
人们普遍认为,现代高尔夫运动起源于 15 世纪的苏格兰。然而,关于第一个高尔夫球是由什么制成的,有很多争论。许多说法称,它们是用山毛榉和黄杨树等硬木雕刻而成的,而有一些人则不太相信,因为几乎没有证据支持这一理论。
无论最早的高尔夫球是否由硬木制成,有一点是肯定的:木质高尔夫球在高尔夫比赛中是不符合标准的。它们的飞行能力一般,主要是由于它们的重量。
2. 毛茸球
接下来是毛茸茸的球。这种球最初产于荷兰,然后进口到苏格兰。它是由一个圆形的皮革外壳制成的,里面装有牛毛或稻草。由于它们价格实惠,300 多年来一直是高尔夫球的热门选择。
3.羽毛球
羽毛球是在 17 世纪早期发明的。它与毛茸球很像,但里面装的不是牛毛,而是鹅毛或鸡毛。为了制作羽毛球,高尔夫球制造者会把湿羽毛塞进一块湿皮革里,当羽毛变干时,羽毛会膨胀,而皮革变干后会收缩。这就造就了非常紧凑和致密的高尔夫球。有一些人说,它的特征只有现代高尔夫球才具备。
羽毛球的缺点是它们非常昂贵。以今天的货币计算,一个羽毛球的价格从10美元到20美元不等(约 60 元到 120 元人民币)。

六个羽毛高尔夫球。图片由Geni提供自己的作品。图像在GNU 免费文档许可证下,通过Wikimedia Commons获得许可。
4. 古塔胶球(Gutty)
1848 年, Robert Adams Paterson 发明了“gutty”,也就是古塔胶球,它彻底改变了高尔夫球的设计。它的形状是一个球体,由人心果树的树汁液干燥后制成。与羽毛球相比,古塔胶球虽然飞不了那么远,但是它的价格却便宜很多,让更多的人参与到高尔夫运动中来。
在使用古塔胶球的时候,高尔夫球手们很快就注意到一个奇怪的现象:表面被割裂的球飞得更远。这一发现促使高尔夫球制造商有意在他们设计的球上添加凹痕,通常是用荆棘图案(或类似浆果表面的图案)。
5. 哈斯克球(Haskell)
那么,无聊是怎么导致高尔夫球设计的下一次重大突破的呢?1898 年,Coburn Haskell 在等待朋友的时候,将橡胶线绑成一个球状物,以此来消磨时间。当他把球弹起来时,被它惊人的飞行能力吓了一跳。他的朋友 Bertram G. Work 建议他在上面加一层覆盖物,于是 Haskell 就诞生了。
早期的 Haskell 是由液体或固体内核、橡胶线层和由橡胶树液制成的外壳制成的。像古塔胶球一样,它们的表面也有荆棘图案。然而,当人们了解到倒置凹坑可以让球获得更好的飞行模式时,情况发生了变化。哈斯克球的发明为我们今天所熟知的高尔夫球铺平了道路。
高尔夫球的未来
可以说,高尔夫球已经经历了从由毛皮、羽毛到树脂液体制成的很长一段路,但是高尔夫球的进化并没有结束。制造商们一直在研究提高高尔夫球空气动力学和机械性能的方法。
与过去的高尔夫球制造商不同,工程师和设计师现在可以利用仿真分析不同层数、材料、凹坑数量和大小等高尔夫球的性能。让我们在今天的博客文章中探讨一个使用仿真设计高尔夫球的例子……
模拟高尔夫球杆对高尔夫球的影响
正如我们在高尔夫球的冲击分析教程模型中演示的那样,工程师可以使用仿真分析高尔夫球杆撞击高尔夫球时的机械冲击。黏性罚函数可以用来模拟两个部分之间的接触,以稳定动态事件。仿真只观察了2毫秒的时间段,因为它只关注球杆击球的影响。
点击查看高尔夫球冲击分析教程模型的动态演示!
模型概述
模拟的高尔夫球杆的尺寸基于一个具有 34° 杆面角的 7 号铁。杆头宽约 9 厘米,趾部高 6 厘米,距离杆身3.5 厘米。该模型假设球杆由钢制成,并具有以下特性:
- 密度:7850kg/m3
- 杨氏模量: 200GPa
- 泊松比: 0.3
高尔夫球是一种高度规范的运动器材。因此,在建模时,我们确保我们的高尔夫球符合由 R&A 和美国高尔夫协会(USGA)建立的高尔夫标准。所述高尔夫球模型的直径为42.67mm,由三层组成(一个内核,一层覆盖物和一个外壳),球表面有362个凹坑。用 neo–Hookean 超弹性材料模型描述了球的所有部分,并定义了内核和覆盖物的黏弹性性质。整个球重45.93克。
下面,我们可以看到球杆和高尔夫球的几何形状。
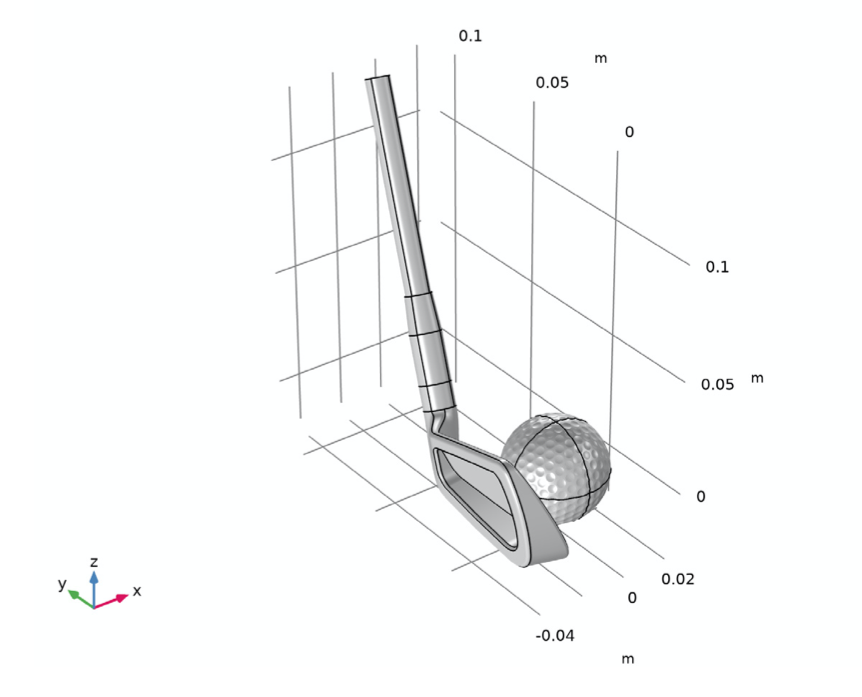
在示例教程模型中,7 号铁和 3 层高尔夫球的几何形状。
结果
下面,我们可以看到球杆撞击高尔夫球之前、期间和之后的模拟。当高尔夫球被杆头击中时,会产生很大的变形。通过观察印在高尔夫球上的COMSOL标志的运动,我们也可以推断出摩擦接触如何导致高尔夫球的旋转。模拟预测的转速为6113转/分。

高尔夫球被 7 号铁球杆击球前、中、后的照片。计时时间分别为 0ms(左上)、0.15 ms(右上)、0.30ms(左下)和0.45 ms(右下)。
下图中的大变形更加明显。
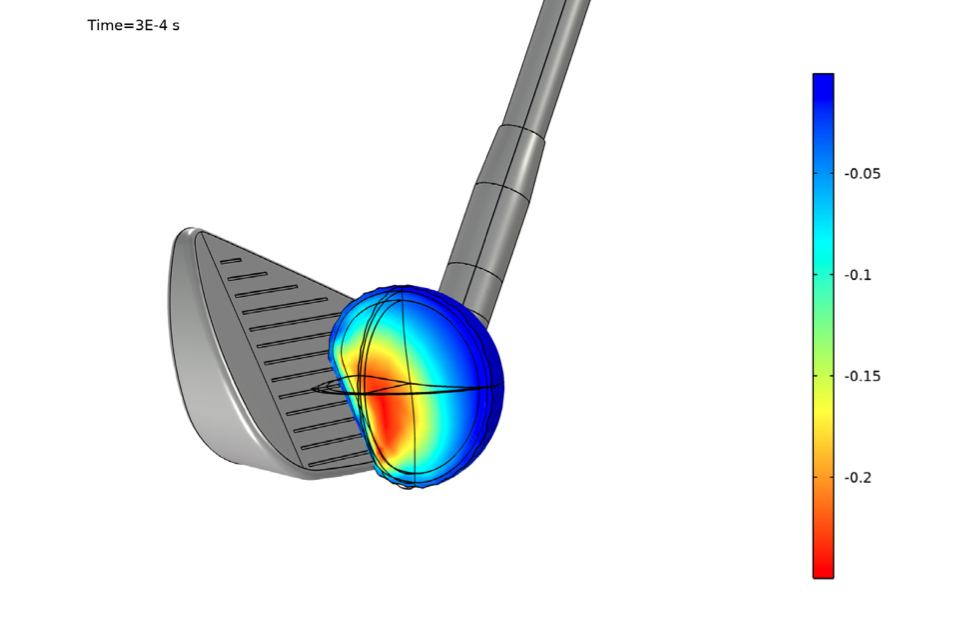
0.3 ms时,高尔夫球的变形和球内部第三主(压缩)应变的分布。
在下图中,我们可以看到杆头和高尔夫球在撞击过程中的平均速度大小。这使我们能够详细地研究这个问题的运动学。由于杆轴的柔韧性,杆头的速度在撞击期间和之后都有所下降。撞击后,最初的145公里/小时(~90英里/小时)的杆头速度被转换为187公里/小时(~116英里/小时)的球速度。这导致所谓的击球效率约为1.3,这与现代商业高尔夫球的性能相当。
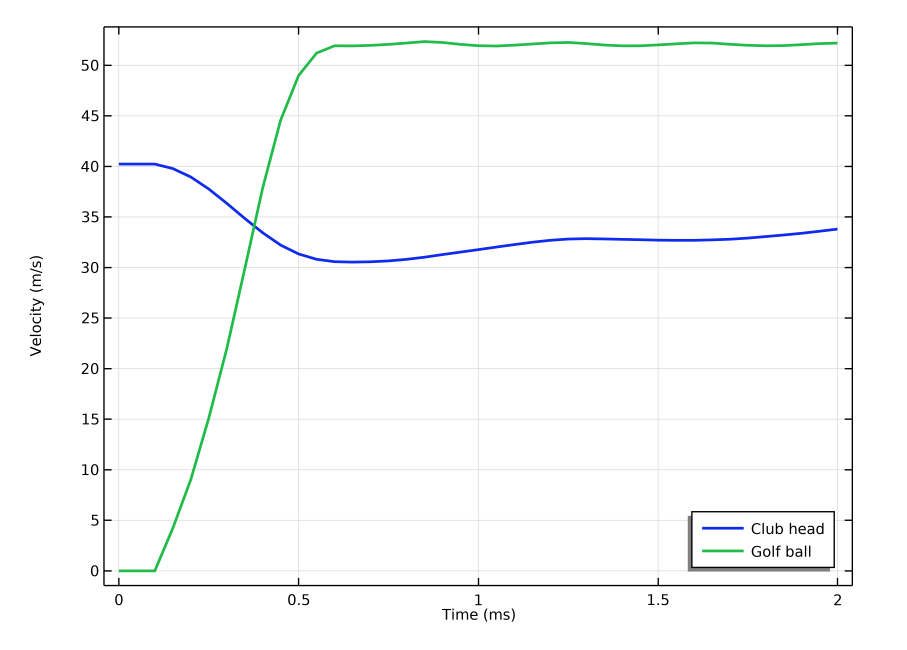
在模拟过程中杆头和球的速度。
接下来,让我们看看在模拟过程中高尔夫球的总弹性和动能的变化。在下图中,弹性和动能含量的峰值代表了杆头撞击球的持续时间。撞击后,高尔夫球的弹性能量由于其核心的黏弹性特性而衰减。相比之下,其动能可达到64 J的恒定值。
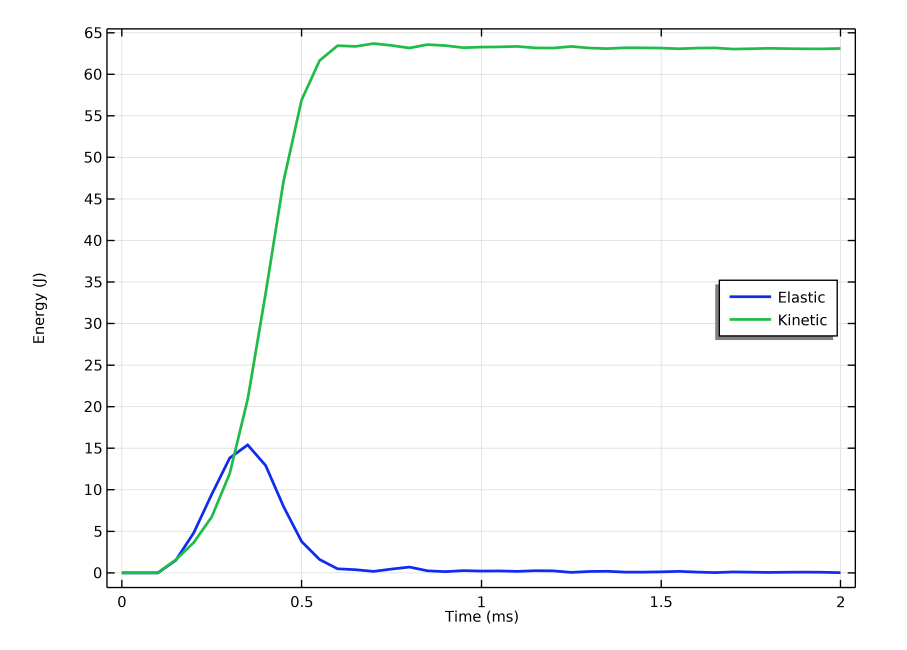
高尔夫球在被7号铁球杆击打前、中、后的总弹性能和动能。
下一步
从 COMSOL 案例库中下载模型文档和 MPH 文件,了解如何建立本文讨论的模型。
拓展阅读
阅读更多使用仿真分析运动和运动器材的方法:
Surlyn是Performance Materials NA Inc.的注册商标。
21 世纪初期,黑胶唱片已被人们遗忘在角落里,积满了灰尘。但之后发生了一些奇怪的事情。2008 年,全世界的音乐商店开始庆祝“唱片店日”。2020 年,黑胶唱片的销量创下了历史新高,自 1986 年以来首次超过了 CD 销量。事实证明,与使黑胶唱片重新流行的怀旧情怀一样,黑胶唱片的历史及其背后的科学同样让人着迷。
黑胶唱片的历史
圆筒留声机
1877 年,托马斯·爱迪生正在研究他最出名的两个发明:电话和电报。在这个过程中,他发明了电唱机(phonograph),作为一种播放录制声音的方式。在 1878 年 6 月的 North American Review 杂志上,爱迪生写道,他设想将“音乐再现”,以及听写、教育和报时(如语音时钟)作为该设备的未来用途。
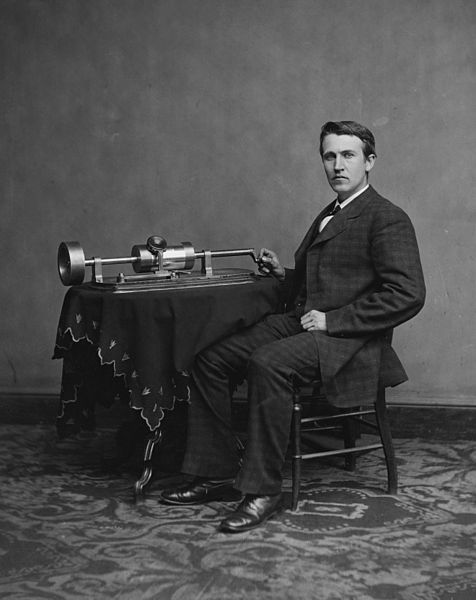
托马斯·爱迪生和留声机的早期原型。图片来自 Levin C. Handy — 美国国会图书馆。通过 Wikimedia Commons进入公共领域的图像。
19 世纪 80 年代,由亚历山大·格雷厄姆·贝尔经营的 Volta 实验室对爱迪生的设计进行了改进,并将改进后的设备称为留声机(gramophone)。留声机不像电声机那样从蜡制圆筒中读取声音,而是通过一个手摇机件来操作,使平板上的硬橡胶盘转动。1887年,德裔美国人发明家埃米尔·贝利纳开发出可以在留声机上播放的侧切平板,它的用途与外观与我们今天所知的黑胶唱片相似。
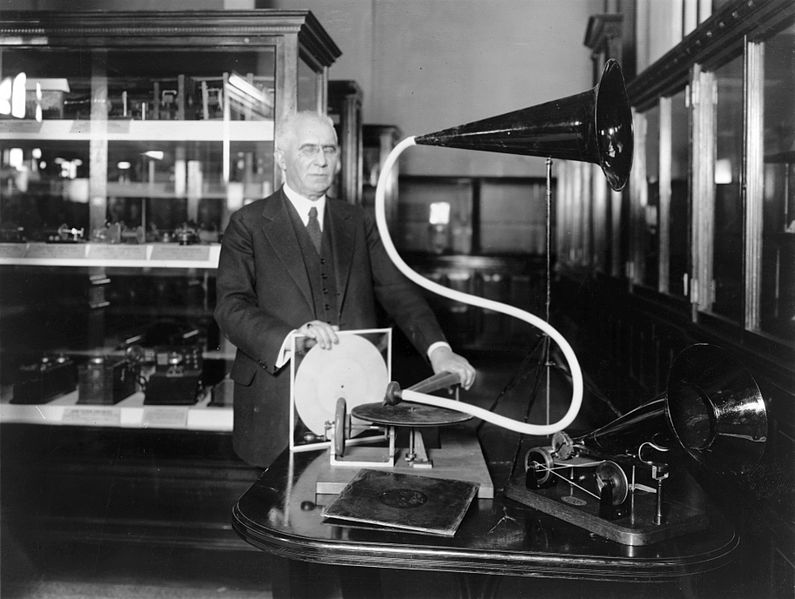
埃米尔·贝利纳 和一个早期的留声机侧切平板唱片。通过 Wikimedia Commons 进入公共领域的图像。
到 1892 年,电唱机和留声机开始向公众销售,前者被定位为“棕色蜡上的娱乐产品”。然而,早期用于留声机的蜡筒只能存储两分钟的录音,而且生产成本高,效率低下。
1901 年,复制蜡筒开始被批量生产。它们由模具制成,而不是用手写笔单独雕刻,并且使用了一种较硬的蜡。这些圆柱体有时被称为“金模”圆柱体,因为生产过程中使用的金电极会释放出金色的蒸汽。使用这种新工艺,一次可以制作 120-150 个圆筒。
78s
由贝利纳推广的平板唱片以约 78rpm 的速度播放,这就是为什么它们被大多数收藏家称为 “78s”。在改进蜡筒质量的基础上,这些圆盘每面可以储存 3-5 分钟的声音。它们由虫胶树脂制成,感觉比现代黑胶唱片更重、更脆。
二战期间,虫胶很难买到,所以一些 78s 开始用乙烯基材料代替。
“现代”乙烯基
到 1930 年,RCA Victor 公司推出了第一张商业化黑胶唱片。这张现代唱片的播放速度为 33⅓ rpm,而不是 78 rpm。这种唱片直径为 12 英寸,这意味着它可以播放更长的声音。1939 年,RCA 的竞争对手哥伦比亚公司也紧随其后发布了一种 12 英寸“长播放”33⅓ rpm 微槽唱片。作为回应,RCA 发布了一种较小的7英寸唱片,每面以 45 rpm 播放一首歌曲,称为 “密纹唱片”。
今天,唱片艺术家仍然将他们的作品称为黑胶唱片和密纹唱片(LP 和 EP),无论音乐是否有实体格式!
到了 20 世纪70年代,微型磁带(当时唯一的便携式听音乐的方式)和八轨磁带盒的推出使黑胶唱片退居次席。CD、数字下载和流媒体服务的推出又延续了这一趋势。
重回焦点:乙烯基复兴
自 2008 年“唱片店日”的出现以来,黑胶唱片与其他媒介相比越来越受欢迎。黑胶唱片的销量稳步攀升,仅 2019 年到 2020 年,其销售额就增长了 46%!这种需求激增导致世界各地的唱片压制厂出现严重瓶颈,有些工厂需要长达 8 个月的等待时间才能获得订单和发货!
前面,我们已经回顾了黑胶唱片的历史和它蓬勃发展的流行。接下来,让我们来看看它们是如何演奏音乐的,它们最初是如何制作的,以及所涉及材料背后的科学……
唱片是如何播放音乐的?
黑胶唱片能够通过唱机播放声音的方式是一个有趣的过程。黑胶唱片(也叫做漆盘)被压制成有凹槽的压痕(这可能是“groovy!”一词的来源)。这些凹槽充当了原始艺术家录音的声波的”指纹”。
如果要播放一张唱片,你需要把它放在唱机上,唱机有一个旋转的底座和一个细长的唱臂。唱臂末端有一个唱头,唱头由钻石或蓝宝石制成。当唱机旋转时,测针在唱片的凹槽中振动。
唱臂末端的唱头包含一个压电晶体。当测针在凹槽中振动时,它会通过墨盒产生电信号。然后该信号被反馈到唱机的放大器。
当唱片播放时,触针从唱片的外缘向中间移动,通常速度为 33⅓ rpm,这样每面都有 20- 30 分钟的声音。(许多唱片艺人在为他们的专辑排序时花了很多心思和精力,会使 A 面结尾的歌曲更有节奏感和活力,让人想翻开唱片继续听)。

唱机上的黑胶唱片,右上角显示了唱臂、唱头和测针。
音乐发烧友们经常唠叨,黑胶唱片比 CD 或流媒体服务具有更好的聆听体验。为什么会这样呢?差异可能归结于模拟录音和数字录音。黑胶是模拟录音的,这意味着唱片的凹槽是实际录音的物理表现。其他现代格式是数字录音的,这意味着录制的音乐被转化为一组离散的数字。也许这就是为什么黑胶唱片的声音经常被描述为比数字播放”更温暖”或”更真实”的原因,尽管这往往是争论的焦点。
黑胶唱片是如何制作的?
黑胶唱片的生产过程既费时又费钱,并且在生产车间开始之前就开始了。首先,录制的音乐必须通过一个称为 母带处理 的优化过程来转换为黑胶唱片。这时,经过专门培训的音响工程师会确保音轨的水平、限制、均衡和排序都达到最佳质量。
接下来,通过一种被称做车床切割 的技术将母带文件印在漆板上。使用一支钻石测针将唱片的凹槽直接刻在铜制母带上。
然后,使用如下所述的电镀 技术制作唱片:在漆过的母盘上喷上银溶液,以增强其抵抗大规模复制产生的压力,然后将它放在镍浴中形成一个”压模”。这个”压模”有一个凸起的凹槽,用于形成黑胶拷贝中的凹槽。通常,需要制作多个母盘和压模,尤其是当工厂需要完成较大(>10000 个)的订单时。每个压模通常可以制作大约 1500-2000 张,然后才会磨损并无法再使用。
电镀后,压模被送到液压机上。预热过的聚氯乙烯 (PVC) 颗粒混合物被制车称为“饼干”的固体圆盘,然后将其加热至 148°C (300°F) 并在液压机内以超过 2000psi 的压力压缩约 8 秒。压模就像华夫饼熨斗一样,在压平饼干的同时将凹槽图案压入饼干中。

唱片压制厂的液压机,正在制作 Alicia Keys 专辑 As I Am 的副本。图像由David McClister提供自己的作品。通过 Wikimedia Commons在公共领域共享。
新压制的唱片会在水浴中再冷却 8 秒,然后将它们修剪成最终的形状,并被磨圆。唱片还要经过最后的固化过程,这对于避免以后变形很重要。
唱片厂通常在生产整批唱片之前都会进行试压。这样,唱片公司和独立艺术家可以在生产数百或数千张有缺陷的唱片之前,进行质量把控。
有趣的事实:唱片为什么是黑色的?
唱片可以看似可以被压制成无穷无尽的各种颜色和图案,制作珍藏版本,这是收藏家的梦想。

我个人收藏的黑胶唱片的白色、深紫色和赭色/棕褐色变体。
然而,根据Furnace Record Pressing 的说法,黑胶唱片最常采用黑色 PVC 压制,这可以用静电来解释。
事实证明,PVC 是一种天然绝缘体,随着时间的推移会产生静电,而这种电荷会吸引灰尘。灰尘是黑胶唱片最大的敌人:它会积聚在凹槽里,磨损唱片机的触针。将炭黑添加到PVC混合物中,是为了增加材料的整体导电性,这意味着随着时间的推移,静电和灰尘在唱片上的积累会减少。
根据个人经验,黑色唱片似乎也很容易积灰,所以在收起来之前最好先把它擦干净!
黑胶唱片背后的材料科学
黑胶唱片的主要成分不是节奏、旋律或灵魂,而是聚氯乙烯,一种由氯和乙烯组成的聚合物。乙烯是通过加工石油、煤炭和天然气等碳氢化合物原料制成的,而氯是通过在膜电池电解槽中电解盐水来制造的。这两种材料结合起来形成二氯化乙烯,然后转化为氯乙烯单体,或称为 VCM。

粉末状的纯聚氯乙烯。图片由 LHcheM提供自己的作品。通过Wikimedia Commons 获得许可(CC BY-SA 3.0)。
最后的聚合过程包括将 VCM 转化为实际的乙烯基聚合物,即 PVC。然后,将化学改性剂添加到混合物中,以实现成品的特定质量。
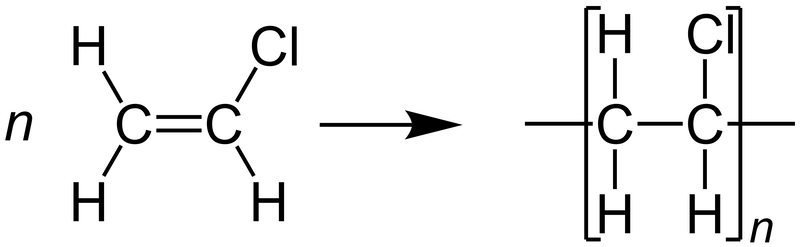
聚氯乙烯聚合过程的分子结构。图片由 Jü 提供自己的作品。图像通过Wikimedia Commons进入公共领域。
使得 PVC 成为黑胶唱片的最佳材料的一个因素是,它有 10%-20% 的结晶度。这意味着它的强度足以支持在生产过程中支撑唱片的凹槽,并且可以承受转盘触针的应用压力。
添加剂
尽管 PVC 约占黑胶唱片的 96%,但混合物中还添加了其他成分,用于赋予某些重要特性。例如,稳定剂约占黑胶唱片材料的 1.5%。它们使树脂混合物更加坚固。在压制过程中,稳定剂用于中和由液压机蒸汽的高温产生的氯化氢气体。
增塑剂只占混合物的不到 1%。它们提高了唱片的柔韧性,使其在制造过程中更容易与母盘上的凹槽相匹配。润滑剂也只占不到 1%,它可以改善压制过程中树脂的流动性,也可以减少操作过程中唱片表面的摩擦。
最后,大约 0.5% 的成分是炭黑,我们已经提到过,它可以减少静电积聚,也可以使唱片表面的划痕更容易被看到。有时,着色剂和从其他唱片中回收的乙烯基会被添加到炭黑混合物中。
黑胶唱片的未来
音乐行业尤其难以预测。谁会想到一百多年前发明的一种演奏音乐的方式会在今天流行起来?
在科学方面,工程师们正在寻找改进唱片机、唱片压制技术和唱片制作材料的方法——所有这些都是为了使制作过程更加环保。
我们从 A 面翻转到 B 面,然后又再回来时,我迫不及待地想知道黑胶唱片世界的未来发展是什么!
延伸阅读
- 阅读有关材料科学应用的更多信息:
- 查看音乐和科学如何结合的其他例子:
今天的客座博主 James Dean来自 Plastometrex 公司和 Double Precision 咨询公司(COMSOL 的认证顾问之一)。他讲解了如何使用有限元(FEM)方法理解硬度值,并介绍了 Plastometrex 公司如何利用仿真 App 和 COMSOL Compiler 开发出一种可以从压痕测试数据中获得应力-应变曲线的全新产品……
开发出一种可以从压痕测试数据中获得应力-应变曲线的全新产品……
硬度测试方法已经应用数十年了,它们容易执行并且能快速得出结果。由于被测材料的体积很小,因此可以绘制不同表面的硬度值,研究局部变化以及获得薄表面层和涂层的数值。然而,硬度不是一个被明确定义的属性。对于一个给定试样,使用不同的测试方法获得的数值都不尽相同,并且在不同条件下使用同一种测试方法获得的数值也不相同。经常进行这类测试的人应该都清楚,具有不同屈服应力和加工硬化特性的材料也可以展现出相似的硬度值。这里,我们将借助 COMSOL Multiphysics® 多物理场软件对这种现象进行演示和说明。
硬度数的概念(通过压痕获得)
硬度是衡量材料抗塑性变形能力的指标。有意思的是,通过硬度不仅可以了解屈服应力,还可以了解之后的加工硬化特性。硬度数提供了一个兼顾这两方面的标准,尽管其定义并不明确。由于硬度代表的含义具有一定的复杂性,因此它不是一个简单的、定义明确的参数,并且使用不同的硬度测量方法测出的数值都不同。但是,所有这些方法的原理都相同,即将指定的载荷施加到硬度计的压头上。压头穿透试样从而引起塑性变形,并留下永久凹陷。硬度值可以通过多种方法获得,但在大多数情况下是通过测量侧面凹痕的横向尺寸(直径)或穿透深度来获取。
硬度通常定义为力(载荷)除以压头和试样之间的接触面积。该比值有应力维度,尽管通常被简单地引用为一个数字(单位为 kgf mm-2)。无论如何,该应力水平与材料的应力-应变曲线,甚至与试样中产生的应力场的关系都不简单。试样的不同区域将承受不同的塑性应变水平,范围从零(塑性区域的边)到百分之几十(接近压头)不等。即使最大应变水平也不能很好地定义,因为它取决于压头的形状、施加的载荷和塑性特性。尽管材料的应力-应变关系可以确定压痕尺寸(给定的压头形状和载荷),但从后者推断出前者并不简单,并且在常规的硬度测试中也从没有尝试过这样做。
布氏和维氏测试
布氏测试开发于 1900 年,是使用 3000kg(〜30 kN)的载荷将直径为 10mm 的硬球压入样品。布氏硬度值由下式计算
(1)
其中,F 是施加的载荷(以 kgf 为单位),D(mm)是压头的直径,而 d(mm)是压痕的直径(投影视图)。该公式是用载荷除以接触面积得到硬度值。这类公式基于简单的几何方法,试样的弹性恢复被忽略。此外,在实践中,凹痕周围可能会出现“堆积”或“下沉”现象,从而使真实的接触面积与理想几何形状获得的实际接触面积不同(也难以精确测量直径)。
维氏硬度测试是1924 年由Smith和Sandland(在 Vickers公司)开发的,其主要目标是降低早期试验的载荷要求。将压头从相对较大的球体改为较小的尖一点的形状,可以使用较低的由砝码产生的载荷。机器内部通常会提供多个砝码,根据型号的不同,其重量从 1 kg 以下到 50 kg 左右不等。(金刚石)压头是一个直角金字塔形,底部为正方形,其相对面之间的夹角为 136°。(锋利的)边推动穿透,并且其在凹痕中产生的线条可以帮助测量压痕大小。
压痕直径 d 通过投影测量(与布氏测试一样)。HV(载荷除以接触面积)由下式计算
(2)
因此,与布氏测试的简单计算类似,可以通过测量d来获得硬度值。与布氏测试一样,试样的弹性回复以及压痕周围的“堆积”或“下沉”现象也被忽略了。
维氏测试应用广泛。实际上,HV是最常用的硬度值,部分原因是它可以改变载荷。它可以应用于各种金属、薄截面、表面层等。图1显示了一组典型硬度数值(参考文献1),包括各种合金。这些数值是通过对特定样品的压痕尺寸进行仔细测量而获得的。这些数据可用于表示不同金属硬度的典型范围,尽管对确切的数值应该谨慎一些。
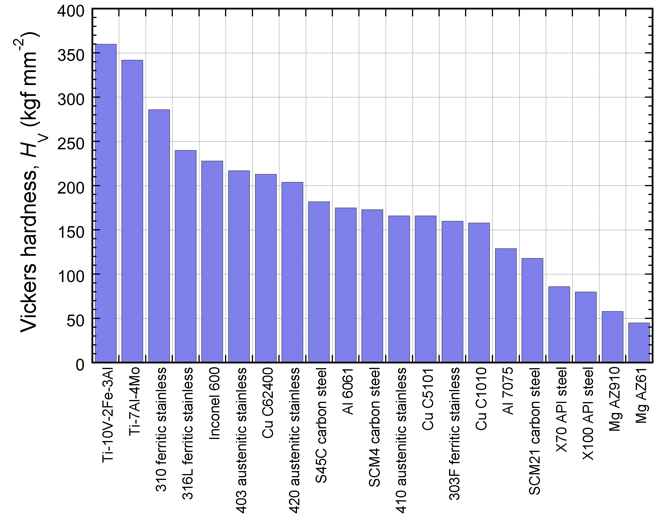
图1 一组合金的维氏硬度数(参考文献1)。
将硬度数乘以 g(9.81),可以得出作用在接触面积上的应力(单位 MPa)。该应力与应力-应变曲线没有简单的对应关系。但是,如果忽略加工硬化,那么硬度应与屈服应力成比例关系。对于维氏测试,该关系常用下式表述
(3)
这些表达式通常用于从硬度测量中获得屈服应力。
使用有限元法获得两种合金的硬度值
通过有限元模拟压痕过程,可以预测硬度值,该数值可以通过对特定合金(定义了应力-应变曲线)进行特定的测试来获得。这里我们使用两种金属 Ti-6Al-4V(318)和 Hadfield Manganese( 锰合金)钢来测试。这两种合金塑性变形的真实应力-应变曲线如图2所示。可以看出,二者有明显不同,318具有高屈服应力,但加工硬化有限;而锰合金最初较软,但表现出更好的加工硬化特性。
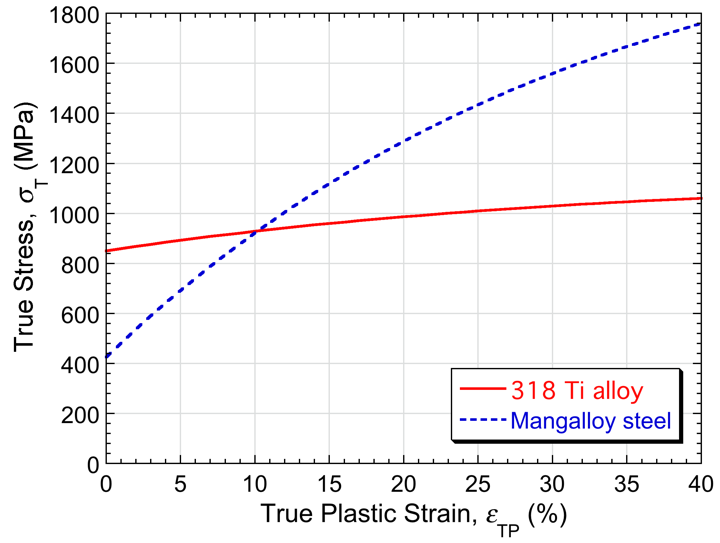
图2 318钛和 锰合金的应力-应变曲线。
图3 显示了使用 COMSOL Multiphysics 对318钛合金进行布氏和维氏压痕仿真的应力场预测结果。图4 和 图5 以残余压痕剖面的形式展示了对这两种合金进行的布氏和维氏测试模拟结果。为了将这些剖面图转换为硬度值,必须在光学显微镜中观察,并判断压痕的直径是多少。这些观察存在主观性,或者至少取决于成像条件,但是图中显示了预期值以及估计的误差范围。
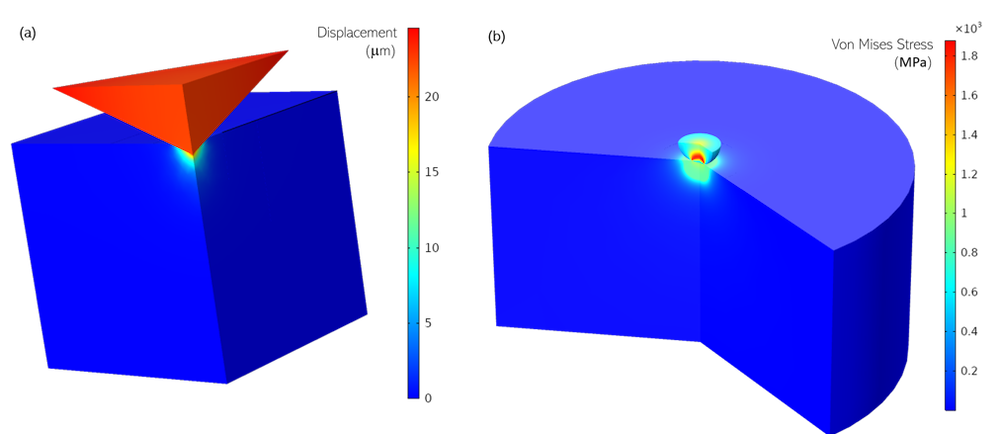
图3 使用维氏压头进行压痕试验仿真,在峰值施加载荷为 5kgf 时预测的位移场(左),使用布氏压头进行仿真预测的在峰值施加载荷为 3000kgf 时的 von Mises 应力场(右)。
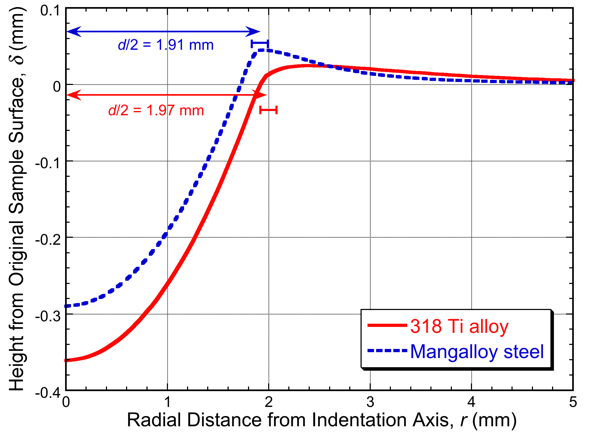
图4 对 318钛和锰合金进行布氏压痕测试后预测的残余压痕剖面。


图5 使用 4 种不同的载荷对 318钛(左)和锰合金(右)进行维氏压痕测试后,预测的残余压痕剖面(沿长径)。
通过仿真预测获得的布氏硬度和维氏硬度值如图6所示,所示的范围与图4 和 5 中所示的测量直径范围对应。有几点很清楚,尽管这两种合金的应力-应变曲线非常不同(图2),但由此获得的硬度值相似——当然是在测量方法预期的实验误差范围内。还可以看出,这些误差范围相对较大,尤其是对于较小(较低载荷)的维氏压痕而言。经常进行这类测量的人都熟悉这种变化。此外,尝试将这些硬度值转换为明确定义的参数,例如屈服应力(使用通过等式(3)这样的关系),也可能会有很大误差。对于这两种合金,获得的值大约都是 800 MPa,这对于钛合金来说是可以的(因为它的硬化很少),但对于锰合金来说却远远不够。尽管大多数获取和使用硬度值的人都了解应谨慎对待所获得的值,但实际情况并没有这么理想:无论如何,将其视为定量都可能会产生误导。
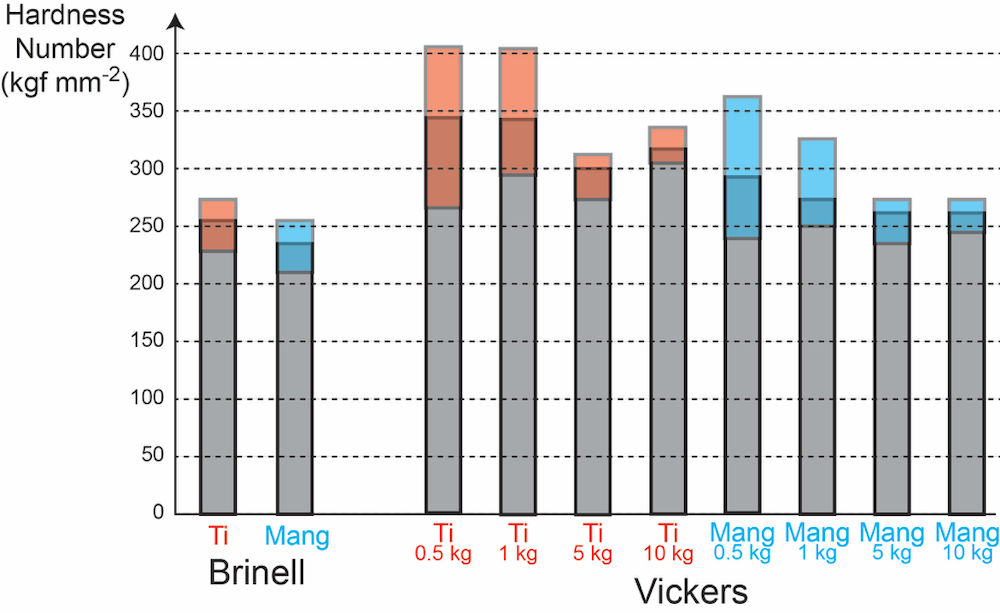
图6 从图3 和图4 所示的压痕直径数据得出的硬度值。
压痕塑性测定法
可能更有用的测试是,将硬度测试的最佳属性(速度、简便性和多功能性)与常规拉伸测试的最佳属性(即完整的应力-应变曲线的生成)相结合。压痕塑性测定法就是这样一种测试方法,它由 Plastometrex 的科研人员开发,包含三个非常简单的步骤:
- 材料中会产生球形凹痕(与布氏硬度测试中的情况非常相似)
- 使用集成的轮廓曲线仪测量残留轮廓形状
- 在使用 COMSOL Multiphysics 中的 App 开发器开发的定制 App 中分析残留轮廓数据
从概念上讲,基本方法非常简单,包括重复进行压痕有限元仿真(使用 COMSOL Multiphysics),收集实验数据(残余轮廓形状)和模型预测收敛(在本构塑性关系中对参数进行系统更改之后)。但是有几个复杂的因素,包括解“唯一性”和确定最佳测试条件的问题。同样,任何这样的软件包(要在商业上可行)都应该能非常迅速地提供解,因此收敛过程必须快速而稳健。实际上, Plastometrex 实施的方法确实可以确保在提供残余轮廓数据后的几秒钟内获得完整的应力-应变曲线。整个测试程序,包括创建凹痕和测量轮廓,只需要 3 分钟。
仿真 App SEMPID 和 COMSOL Multiphysics® 中的 App 开发器
App 开发器的主要吸引力在于,它允许用户创建独立的应用程序,这些应用程序可以访问 COMSOL Multiphysics 的全部功能,并且许可协议允许将这类工具商业化。我们的应用程序实现了压痕塑性测定的基础框架,被称为从压痕数据中提取材料特性的软件(Software for the Extraction of Materials Properties from Indentation Data,SEMPID)。App 开发器对于 SEMPID 的开发至关重要,这主要归功于其各种本地开发工具以及与 COMSOL Multiphysics 的紧密集成。SEMPID 应用程序能够利用 COMSOL Multiphysics 的许多核心功能,包括结构力学和非线性结构材料模块,配备的优化工具模块以及高级求解器设置功能,共同开发了一个定制的 App。这个仿真App也是形成一个新公司的基础,Element Materials 技术是该公司的主要投资者。
SEMPID 软件包的功能
SEMPID 应用程序计算了真实的和名义上的应力-应变曲线。它还有一个附加功能,允许用户实时模拟拉伸测试,并可以捕获应力-应变曲线的颈缩部分。SEMPID 应用程序可以直接比较通过压痕塑性测定法获得的应力-应变曲线和通过常规单轴拉伸试验(当然,这是此新方法有效性的最终检验)获得的应力-应变曲线。
图7 显示了 SEMPID 应用程序的几个屏幕截图以及压痕塑性仪的图像。图中展示了一组计算的应力-应变曲线,以及在 SEMPID 应用程序中运行的拉伸试验仿真结果。

图7 来自 Plastometrex 的压痕塑性仪和使用 COMSOL App 开发器开发的 SEMPID 软件工具的屏幕截图。
压痕塑性仪
定制开发的压痕塑性仪可以与 SEMPID 软件包捆绑在一起购买,它遵循内部开发的机密测试例程的程序化测试协议完全自动化必要的测试程序。压痕塑性仪可以处理各种大小和几何形状的试样,并且可以容纳平行的真实组件。它具有完全集成的电子器件,最大载荷容量为 7.5kN,集成了轮廓仪和定制编写的控制软件。它体积轻巧(<40 kg)且结构紧凑,可放置在典型的台式机上。图8所示为对铬镍铁合金 718 进行的测试验证示例,该方法适用于所有金属类型。

图8 左图是压痕塑性仪在铬镍铁合金 718 试样中产生的压痕。右图是 SEMPID 得出的应力-应变曲线与使用传统的机械测试实验测得的应力-应变曲线的比较。
观看这个视频,快速了解有关压痕塑性计的更多内容。
参考文献
- S.K. Kang, J.Y. Kim, C.P. Park, H.U. Kim, and D. Kwon, “Conventional Vickers and True Instrumented Indentation Hardness Determined by Instrumented Indentation Tests”, Journal of Materials Research, 25(2): pp. 337–343, 2010.
关于作者
James Dean 博士拥有伦敦帝国学院材料科学学士学位,和克兰菲尔德大学的热力(燃气轮机工程)硕士学位,并获得了劳斯莱斯UTC奖学金。他从剑桥大学材料科学系获得博士学位。从那以后,他在同一部门担任研究助理和高级研究助理职位,并于 2018 年加入卡文迪许实验室的科学计算中心,担任材料科学计算方法博士培训中心的高级教学助理和协调员。2012 年,他创立了Double Precision Consultancy(DPC),DPC 是一家总部位于英国剑桥的公司,专门为工业客户提供高级数学建模服务。DPC 现在是仅有的五个英国 COMSOL 认证顾问之一。2018 年末,他与其他人共同创立了 Plastometrex 公司,现在担任公司首席执行官。
无创通气(Noninvasive ventilation,NIV)面罩是一种医疗救助装置,它通过持续气道正压通气技术(Continuous positive airway pressure,CPAP)为呼吸困难的患者提供空气。意大利的一家研究型公司 Polibrixia 使用多物理场仿真为使用CPAP-NIV 的患者设计并优化了一款与之适配的口鼻面罩,为全球战斗 COVID-19 疫情工作提供了更多的辅助呼吸装置。
NIV 面罩:全球性的设计挑战
受呼吸道疾病 COVID-19 感染的患者中,约有 5% 需要进入重症监护病房住院和呼吸器辅助治疗。但是,在 COVID-19 迅速传播的地区,医院的机械式(有创)呼吸器救助能力和经验常通常很有限。此外,机械通气可能会造成不良影响和长期的副作用,因此,使用无创式替代疗法可以减轻患者的痛苦。
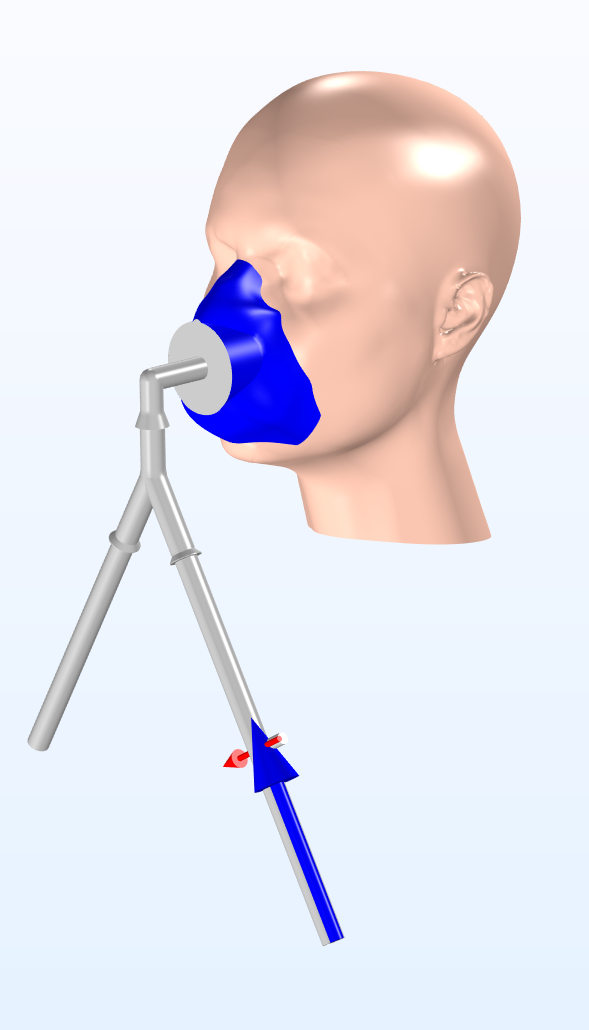
在 COMSOL Multiphysics® 中模拟的无创通气面罩。图片由 Polibrixia 提供。
NIV 通气面罩为 COVID-19 患者提供了一种非侵入式监测和通气的形式,从而减少了其对机械式呼吸器(有创呼吸器)的需求。为了有效地设计非侵入式通气面罩,以在严格的时间限制内和最大程度地提高患者体验之间获得平衡,COMSOL 的认证客户 —— 意大利 Polibrixia 公司的 Davide Fausti,Maurizio Mor 和 Massimo Antonini 使用 COMSOL Multiphysics® 软件的结构和流体流动功能对产品进行了设计与优化。
NIV 通气面罩的结构分析
Polibrixia 公司设计的通气面罩主体由聚碳酸酯材料 Makrolon® 2658 制成。材料的技术规格表仅包含与屈服点有关的数据,但不包含屈服点至断裂点后的拉伸数据。
研究人员需要了解材料的组成。为了确定强度和耐久性,他们在 COMSOL Multiphysics 中进行了应力-应变分析。
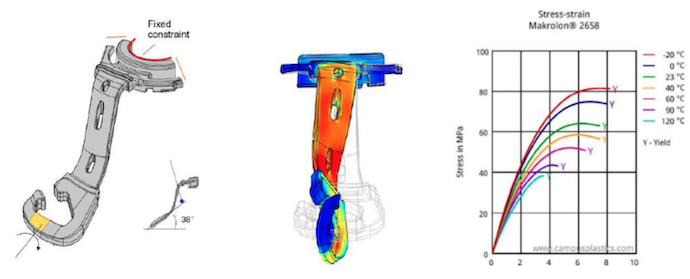
通气面罩主体(左)和聚碳酸酯材料(右)的应力应变分析仿真结果。图片由 Polibrixia 提供。
气流的 CFD 和物质输运分析
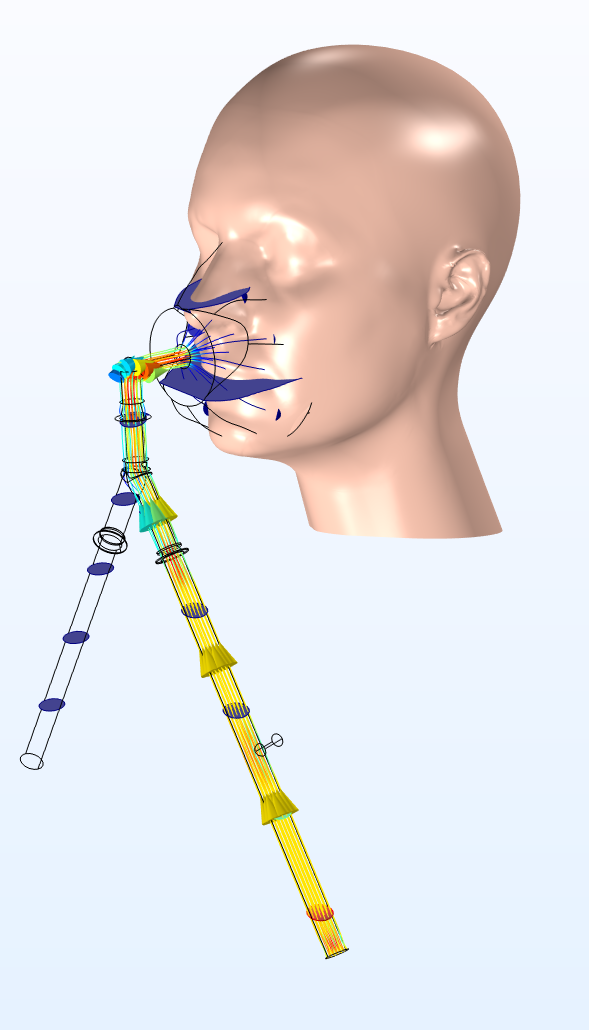
通气面罩的主要用途之一是增加肺和动脉中氧气的分压。由气瓶输送的每升氧气都会与周围的空气混合,最终使面罩中的氧气浓度增加 3%-4%。
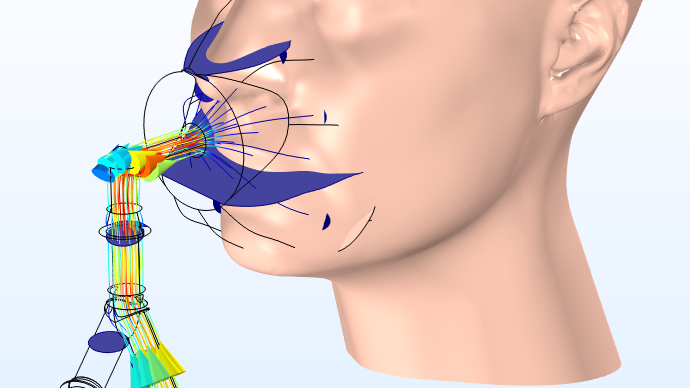
该团队使用 COMSOL Multiphysics 中的 CFD 建模方法来了解不同比例下氧气-空气混合物的流动情况,模拟不同的气流情况,并查看面罩附近气体流速范围。
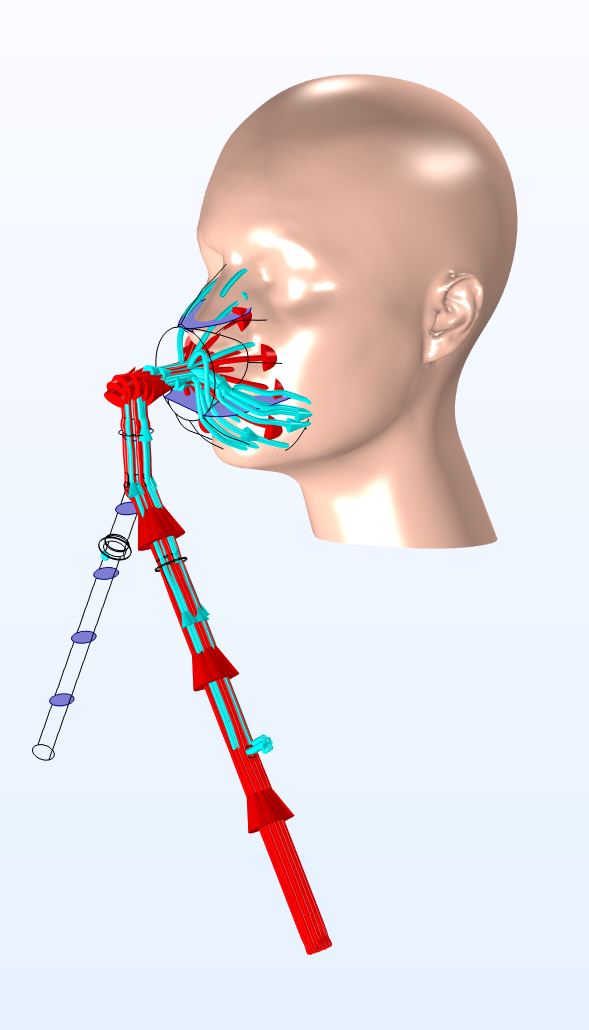
通气面罩中药物剂量水平的 CFD 仿真结果。图片由 Polibrixia 提供。
NIV 通气面罩还可用于控制治疗 COVID-19 患者的药物剂量。通过对输运现象进行建模,研究小组可以得到口罩面部组件中药物扩散的客观(一般性)规律,评估无创呼通气系统中的药物剂量,并分析空气流出时的药物流速。
设计生命救助装置
应对全球 COVID-19 危机需要先进的医疗救助装置,但频繁制造这些救生装置的物理样机是不可行的,尤其是在时间和资源有限的情况下。多物理场仿真可以模拟 NIV 面罩系统中涉及的所有物理场,从而帮助 Polibrixia 等公司将生命救助装置更早地推向市场,并降低开发成本。
Makrolon 是拜耳股份公司的注册商标。