闭环地热换热系统利用电力和地埋管换热器从地下提取和释放能量,为建筑物供暖和制冷。使用地热供暖有助于减少碳排放,尤其是在电力来源为可再生能源的情况下。Renewable Energy 杂志上发表的一篇论文(参考文献 1)探讨了地源热泵系统中倾斜式地埋管换热器的优点。该论文的主要作者 Daniel Deacon 是一位地热交换专家和地热工程师,他向我们讲述了他是如何在这项研究工作中使用多物理场仿真的。
远离天然气
全球都在关注气候危机和减少化石燃料的使用,这促使能源行业开始寻求为建筑物供暖和制冷的替代方法,重点是减少天然气的使用并降低碳排放。使用非碳能源(如地源热泵)供暖是一种可行的替代方案,因为这些能源结合了电能和热能,而非纯粹的电能。地源热泵,或称为地埋管换热器(Borehole Heat Exchangers ),利用的是地下数百米处相对稳定的温度场。地热能源是一种比天然气丰富得多的资源。
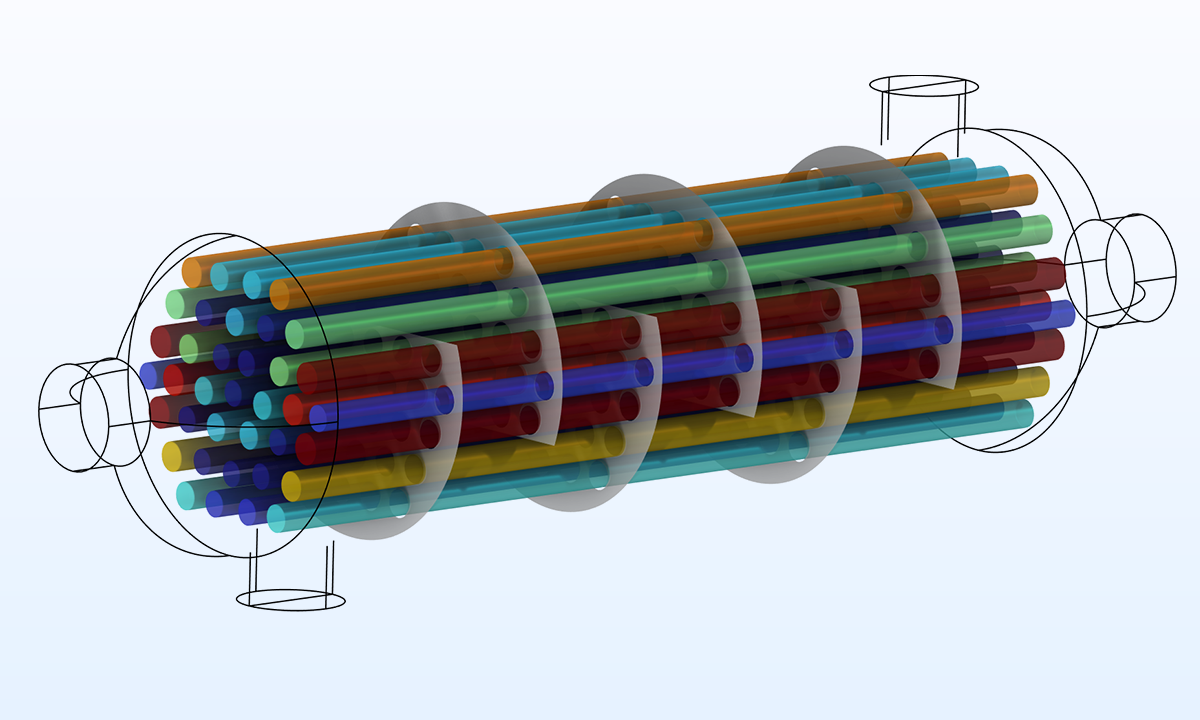
地埋管换热器可作为大型地热系统中的关键驱动部件。它们是由高密度聚乙烯制成的大型管道,嵌入在灌浆柱中。它们采用一个闭环系统,流体在钻孔内的管道中循环,以便在地下和建筑物之间传递热量(图 1)。流体从地下几百米的土壤和岩石中提取热量。然后,这些能量被输送到热泵装置,热泵装置利用这些能量,将流体分配到整个建筑物的机械系统中。当建筑物冷却时,能量会被释放回地下。Deacon 将这一过程称为 “能量平衡”。将多个地埋管换热器组合在一起就形成了一个地埋管换热器场,这通常是为大型建筑物提供足够制热和制冷的能量时所必需的。
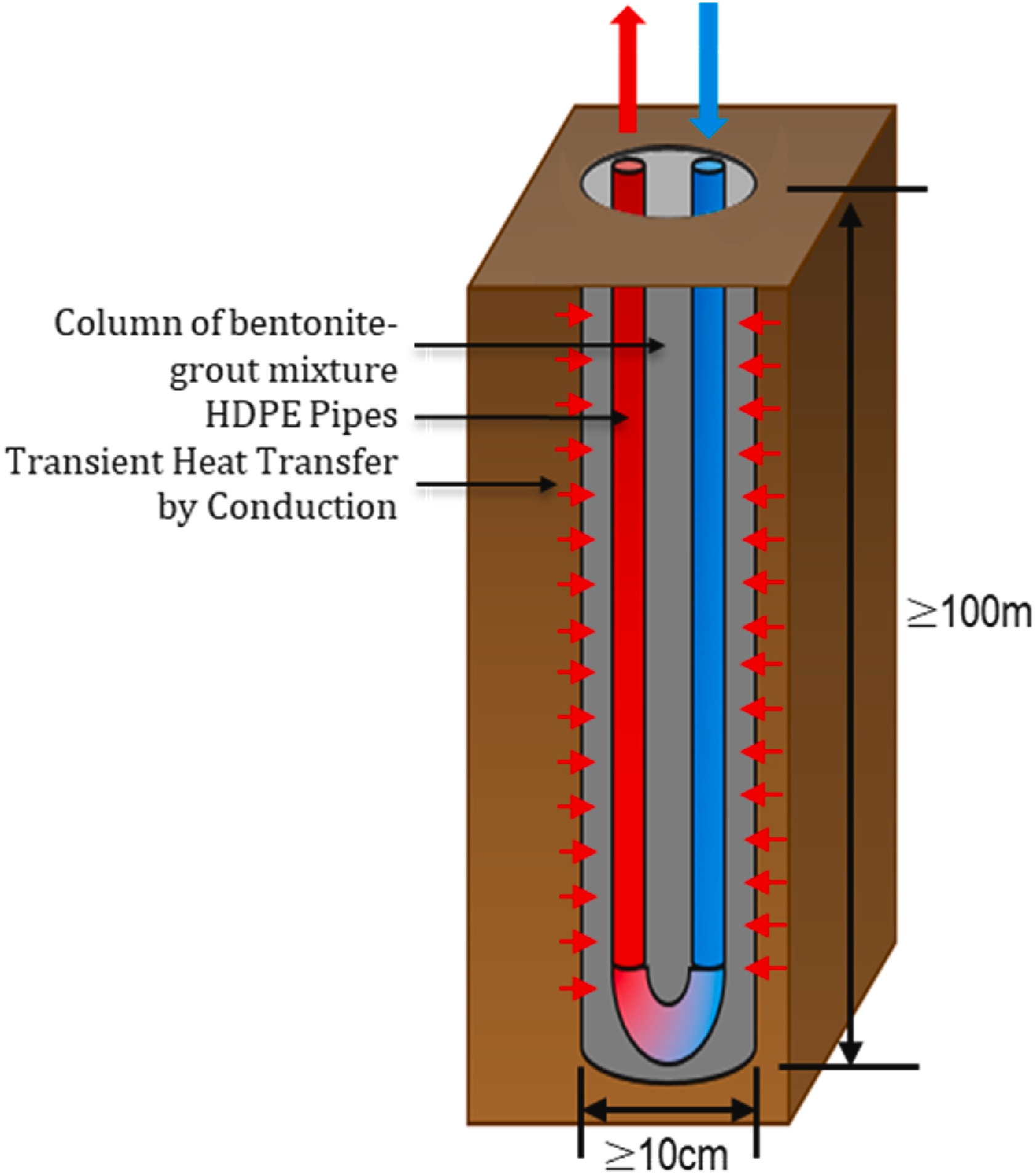
图 1. 一种垂直式地埋管换热器,它从地下提取热量,并将冷却后的流体送回地下。
在 Deacon 工作的加拿大多伦多,所有新建建筑都必须符合多伦多绿色标准 (参考文献 2),这是一项旨在减少碳排放的倡议。该标准对翻新改造也有要求。这些要求对工程师提出了挑战,因为他们必须找到一种方法来满足地面空间非常有限的现有建筑物的供暖和制冷需求。” Deacon 在论文中解释说:“通过倾斜式钻孔,相邻钻孔在地表处的间距最多可减少 90%。” 图 2 展示了这种钻孔间距的情况。
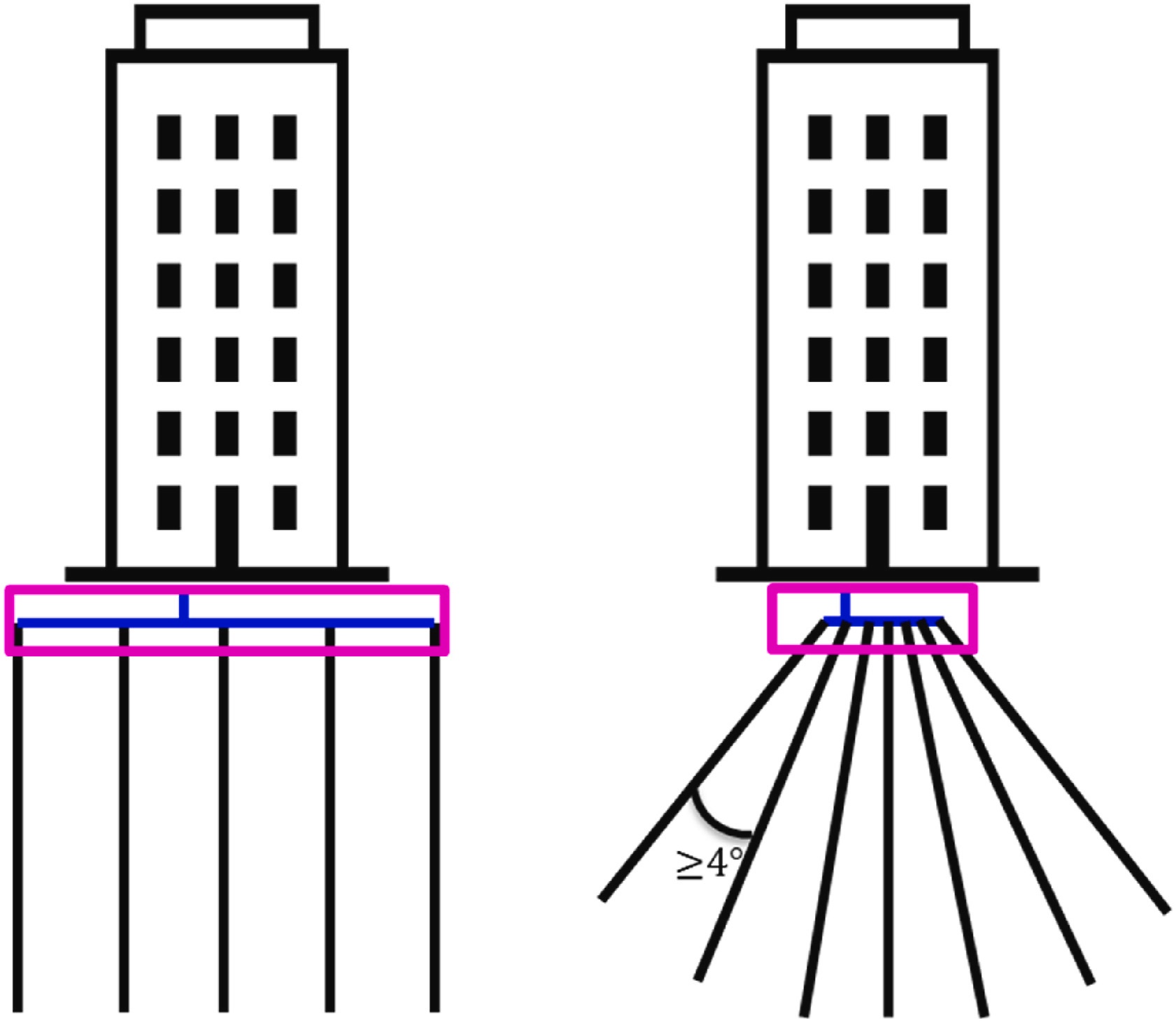
图 2. 倾斜钻孔可大大减少所需的地面面积。
由于大多数文献都是基于垂直式地埋管换热器的,因此行业内缺乏对倾斜式地埋管换热器的建模,这导致了对倾斜式地埋管换热器传热物理特性的假设。Deacon 使用 COMSOL Multiphysics® 仿真软件建立了倾斜式地埋管换热器的三维模型,并将其随时间变化的性能与垂直式地埋管换热器模型进行了比较。
协作与测试
Deacon 基于 Tolga Ozudogru 在 COMSOL Multiphysics® 中开发的地埋管换热器模型(参考文献 3)进行了扩展。该模型将地埋管换热器内的流体流动表示为一维管流,并与周围土壤和岩石等固体材料中的三维热传导相耦合。Ozudogru 将这种方法称为“伪管道法”,与建立完整的管道内流体流动三维模型相比,它节省了大量计算资源。伪管道法将 COMSOL Multiphysics® 中的 管道传热 接口与 固体传热 接口耦合起来。它将流经管道的流动和传热视为瞬态一维过程,并与三维固体域的边界耦合,三维瞬态热传导方程就是在这个边界上求解的。周围固体材料中热传导的三维数值模型采用了有限元法(FEM)。Deacon 使用 COMSOL 的附加产品——传热模块,开发了一个将计算流体动力学(CFD)和三维瞬态热传导相耦合的复合模型。该复合模型可以捕捉到倾斜式换热器中出现的多物理场效应。
这些模拟结果通过 Richard Beier 收集的实验数据(参考文献 4)进行了验证,该实验装置为一个矩形沙箱,其中心装有一个 U 型管换热器。流体在管道中循环,并在回路之间被加热。热敏电阻被放置在周围的沙子中,用于测量不同径向点的瞬态温度。然后,将入口(供水)的质量流量和温度作为数值模型的边界条件。结果表明,COMSOL Multiphysics® 对流体出口(回水)温度和一系列径向位置处沙子温度的预测值与实验结果非常吻合。
为了模拟 2 小时的断电情况,进行了一项中断试验。对流体施加热通量以模拟断电时的情况,而土壤域的初始条件和边界条件与团队进行的不间断试验中的相同,仅入口流体的温度和流速不同。COMSOL Multiphysics® 准确预测了断电 2 小时后重新启动循环泵和加热器后的温升,验证了实验数据中使用的瞬态热传导方程的解(图 3)。这些研究使 Deacon 确信,COMSOL® 能够准确模拟地埋管换热器的传热物理过程。
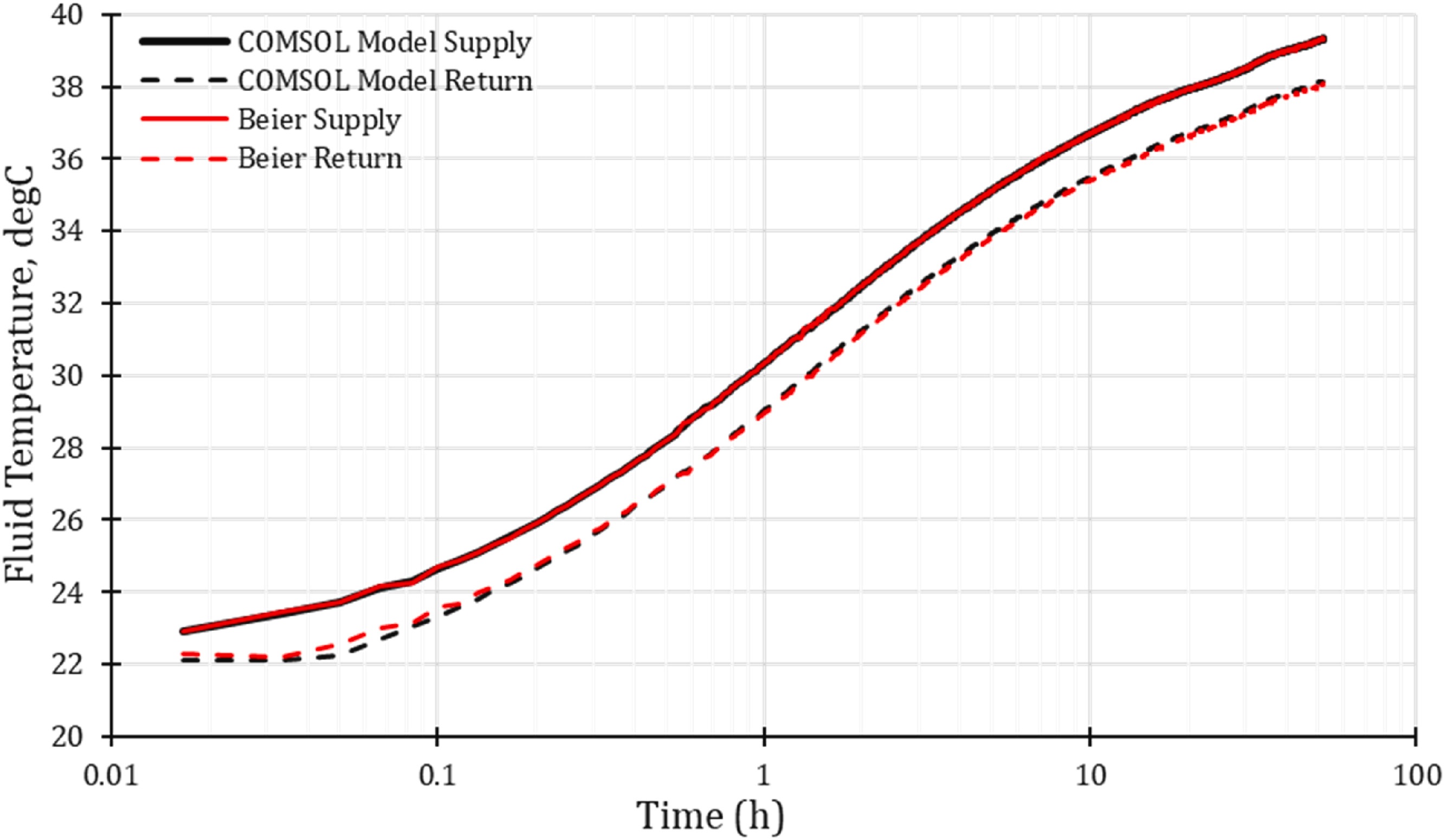
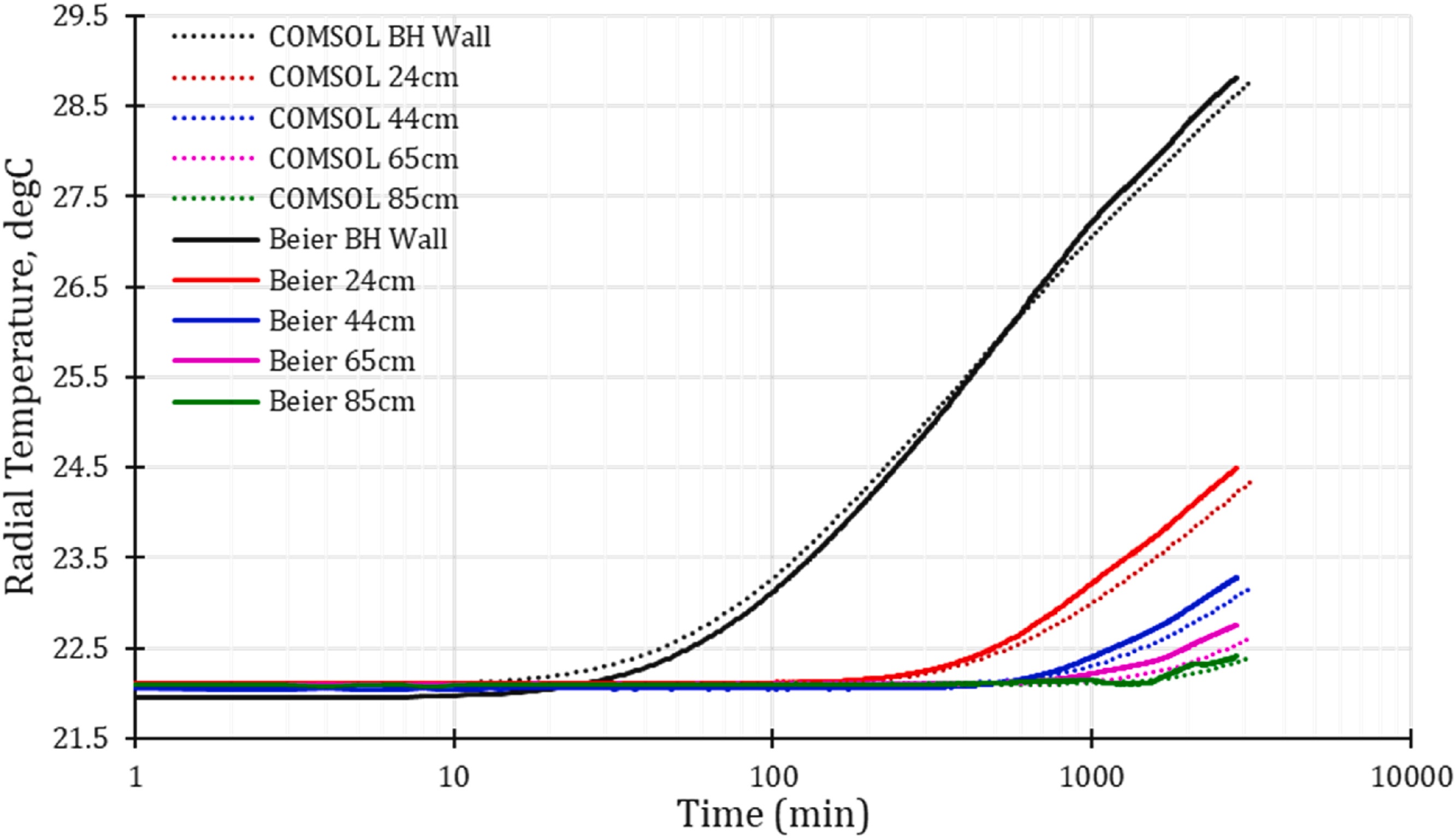
图 3. 左图:入口(供水)和出口(回水)处的流体温度的实验数据和 COMSOL 模拟结果之间具有高度一致性。右图:五个径向位置的温度实验测量值与 COMSOL 模拟预测值的对比。
倾斜式与垂直式地埋管换热器的性能对比
随后,这项研究分析了三种不同地埋管换热器的配置(图 4)在恒定注热速率下的热响应。本研究对以下几种情况的热性能进行了比较:
- 单个垂直式地埋管换热器(1V)
- 2 个平行的垂直式地埋管换热器,相距 5 米(2V)
- 1 个垂直式地埋管换热器和 1 个倾斜式地埋管换热器的配置,在地表相距 2.75 米,倾斜式地埋管换热器与垂直轴呈 3 度倾斜 (1A1V)
根据工业热响应测试中使用的典型功率,入口处的热功率为 20 KW。本研究模拟的总运行时间为 8760 小时,即 1 年。该研究的地层参数代表了安大略省南部的地面测量结果。在整个研究过程中,入口处的质量流量、热功率、流体的初始温度、比热容以及运行时间等运行条件都是恒定的,因此可以单独对热导率进行分析。
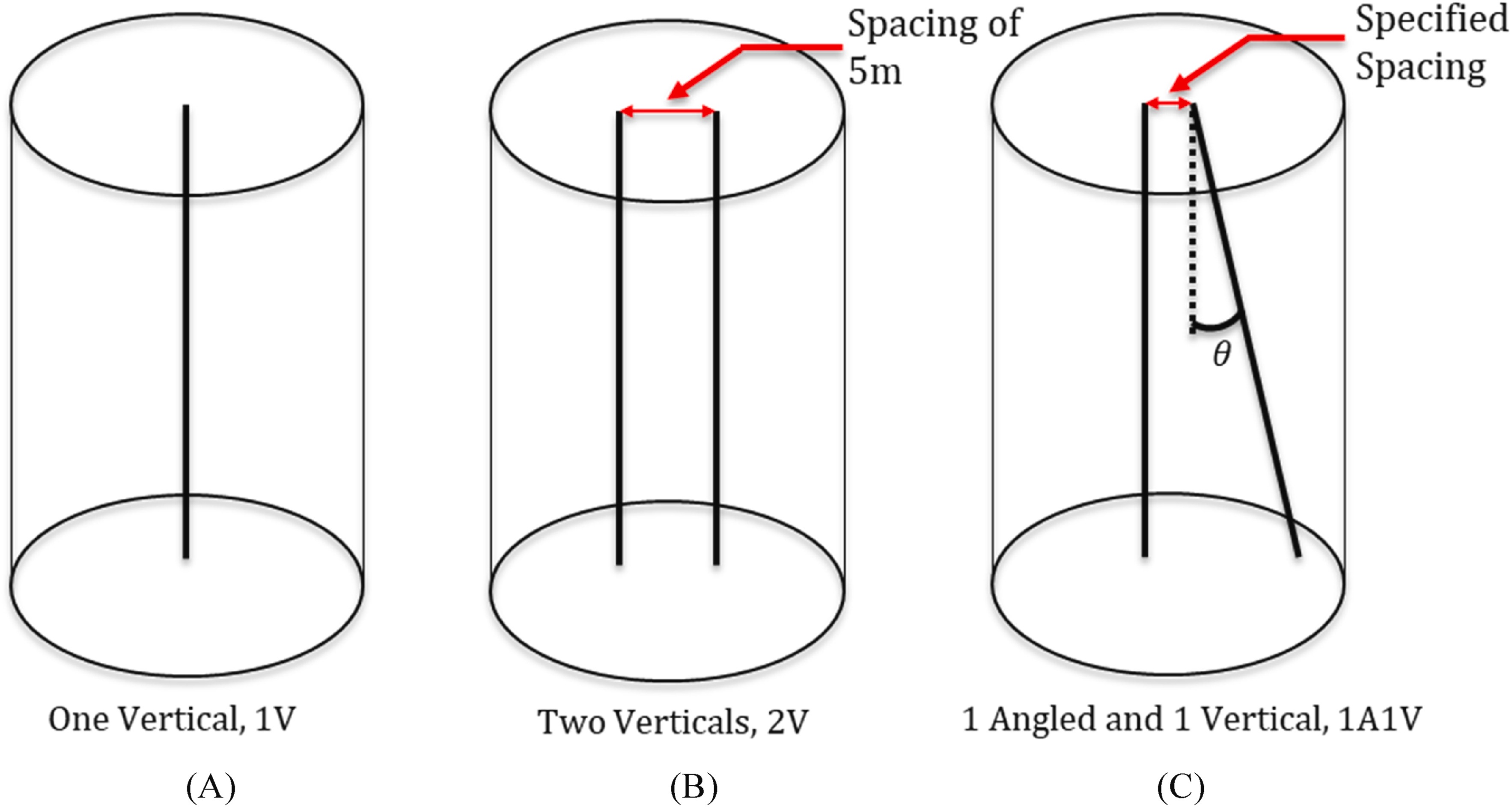
图 4. 用于分析热响应的三种地埋管换热器配置的可视化图。
1V 配置的传热效果被认为是最佳的,因此,通过将其他两种配置的流体温度与 1V 配置的流体温度进行比较,评估了这两种配置的性能。0 K 的温差代表最佳性能。由于地面空间有限,预计 1A1V 中的热相互作用比 2V 开始得更早。热相互作用表现为流体温差的增加(相对于 1V 配置)。不过,一旦 2V 开始产生热相互作用,预计随着时间的推移,1A1V 的效率会越来越高。
在 0–100 小时的运行时间内,两种配置的热性能都类似于 1V 配置,即达到了最佳标准(最大热传递)。在最初的 100 小时之后,1A1V 配置的流体温度比 1V 配置的流体温度高出 0.02°C。最大温差在约 690 小时时达到峰值,然后开始下降,直到 1053 小时,两者的温度曲线在此相交(图 5)。
当两条曲线相交时,2V 的温度曲线会迅速偏离 1A1V,这是因为在 2V 配置中,沿着换热器的整个深度存在热相互作用。1A1V 配置减弱了沿深度方向的热相互作用,导致末端的流体温差比 2V 低约 1.4°C。交汇点标志着 1A1V 的性能从轻微的不利影响向轻微的有利影响转变。该图表明,在更长的时间内,1A1V 配置比 2V 配置表现出更好的传热效果。
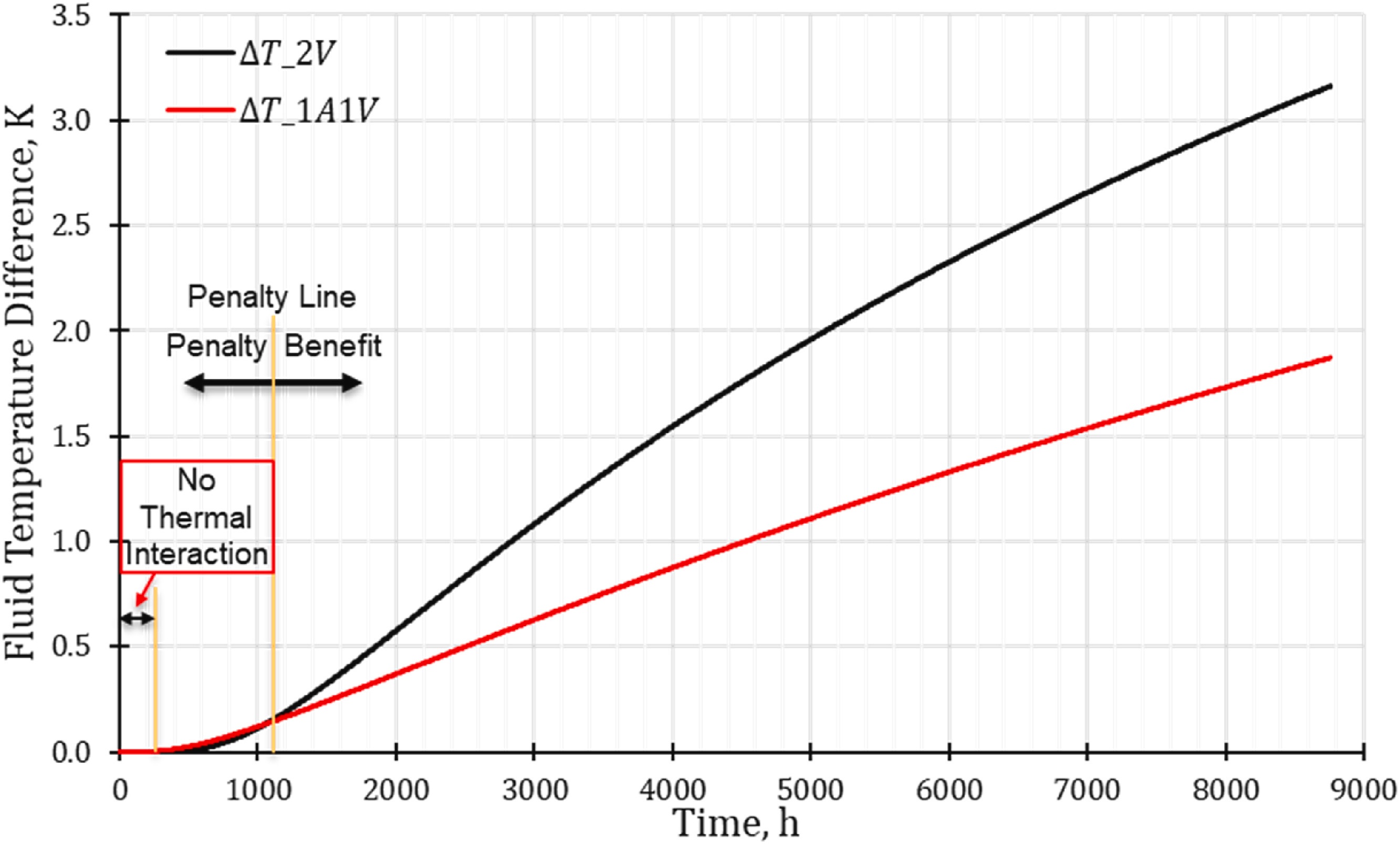
图 5. 在恒定热注入速率下,3 种配置的流体温度差。
衡量大型系统的性能
大多数比独栋住宅大的建筑都需要多个地埋管换热器。所需的换热器数量在设计时要考虑许多因素,其中之一就是在一年中最冷或最热的日子里为建筑物供暖或制冷所需的能量。Deacon 使用了4 个地埋管换热器来模拟不同数量换热器的影响,运行条件保持不变(每个地埋管的流量和入口温度相同,以此模拟不同配置下的传热性能)。
额外的地埋管换热器所带来的风险在于,当热源彼此距离更近时,热相互作用会加剧。他的研究使用了 3 种配置(图 6):
- 4V :4 个垂直式地埋管换热器的配置
- 3A1V-配置 1:3 个倾斜式地埋管换热器和 1 个垂直式地埋管换热器,且换热器之间有明显间隔
- 3A1V-配置 2:3 个倾斜式地埋管换热器和 1 个垂直式地埋管换热器,且换热器之间的间距极小
两种倾斜式配置都需要不到半平方米的地面面积,而 4V 配置则需要 25 平方米。3A1V-配置 2 最适合对地面面积较小的建筑进行翻新改造,而 3A1V-配置 1 则可能最适合地面面积较大的新建筑。

图 6. 4 个地埋管示例的三种配置的几何结构。
首先,模拟结果表明,当地埋管换热器的数量超过 2 个时,每个地埋管的性能就会下降。与 2 个地埋管的配置相比,每个地埋管的性能有所下降;流体温差尽可能小是最佳状态,但 10 年后的流体温差大于 1 K,而在 2 个地埋管的配置中,这一温差小于 1 K。性能下降的原因是热相互作用增加,以及由于地埋管分布更加密集,每个 地埋管可利用的地下空间减少。
关于 4 个地埋管换热器的配置,模拟结果显示,在 1 年的时间里,两种倾斜式地埋管换热器配置(3A1V-配置 1 和 3A1V-配置 2)的流体温差小于垂直式地埋管换热器配置(4V),这表明倾斜配置仍然具有更好的传热性能。在这两种倾斜式换热器的配置中,配置 1 全年的流体温度明显更低,由于间距增大,其性能更好。配置 1 在10 年后的流体温差约为 1 K,而配置 2 的温差约为 2 K。Deacon 推断,优化倾斜配置的布局将提升系统的整体性能。这些结果进一步证实了在整个模拟和研究过程中不断得出的结论。
通过模拟,Deacon 得出结论:通常来说,倾斜式地埋管换热器系统最适合改造项目,而垂直式地埋管换热器系统更适合新建建筑。当持续注入热量时,倾斜式地埋管换热器和垂直式地埋管换热器的初始性能相似,但随着时间的推移,由于地温场深层的地下体积更大,倾斜式地埋管换热器的性能显著提升。在 10 年的模拟时间内,倾斜式地埋换热器在制冷方面的表现也优于垂直式地埋换热器。根据这些结果可以确定,倾斜式系统更适合处理不平衡的能源负荷,也更善于利用地下体积。
“在地埋管位置和角度方面,如果你遵循几条通用规则,它们的性能实际上与传统系统非常相似。” Deacon 说道。
将供暖系统电气化以及将传统系统改造为地热能系统,历来成本高昂且难以普及,但仿真技术已帮助改变了这一局面。借助 COMSOL Multiphysics® 多物理场仿真软件,工程师能够逐小时估算地埋管在未来数十年内的性能表现。此外,仿真还能增强设计的可信度,并有助于降低出错的风险。
“现在我们既然有了这种建模仿真能力,就可以恰当地评估一个地埋管场的规模,降低成本,使设计方案更具可行性。” Deacon 总结道。
参考文献
- D.L. Deacon and M.F. Lightstone, “Three-dimensional analysis of multiple inclined borehole heat exchangers,” Renewable Energy, vol. 237, part B, 2024.
- Toronto Green Standard for New Low-Rise Residential Development, City of Toronto, Canada, Jan. 2017; https://www.toronto.ca/wp-content/uploads/2017/11/91f2-City-Planning-Toronto-Green-Standard-2017_LowRise_Standard.pdf
- T. Y. Ozudogru et al., “3D numerical modeling of vertical geothermal heat exchangers,” Geothermics, vol. 51, 2014.
- R. Beier et al., “Reference data sets for vertical borehole ground heat exchanger models and thermal response test analysis,” Geothermics, vol. 40, issue 1, 2011.
在设计换热器时,必须考虑传热速率、水力阻力和效率,对于某些应用,考虑结构完整性也很重要。然而,如果没有经济可行的制造方法,花费时间和资源来研究这些组件将是徒劳的。在整个设计过程中考虑设计和制造成本使换热器的开发成为一项艰巨的任务。这篇博客文章,我们将探讨使用形状优化和拓扑优化来应对这这类设计挑战的可能性。
形状优化
形状优化的过程与物理场无关,因此比拓扑优化更容易实施。需要注意的是,形状优化和拓扑优化均涉及大量设计变量,无论采用哪种方法,都必须使用梯度优化算法。当涉及大量设计变量时,基于梯度的优化方法显著快于无导数方法,因为它能高效利用敏感性信息指导每次迭代,而不是依赖耗时的采样或穷举所有可能解来寻找最优解的确定性优化方法。本文中示例采用的是移动渐近线(MMA)优化算法以及自动梯度计算方法。
首先,我们来看一个板式换热器的形状优化,然后探讨管壳式换热器中管道的尺寸设计。
对形状优化的更详细介绍感兴趣的读者,可查阅博客:电磁学中的形状优化:第 1 部分。
对于给定的驱动流率,可以通过对压降施加约束来限制换热器的水力阻力,但优化将倾向于对压降的最大允许值进行相应的设计,因此实际应用中的泵送功率和水力阻力是固定的。或者,可以施加压力驱动的流量,让优化过程选择泵送功率和水力阻力,这种方法计算成本更低,我们将重点探讨此选项。
考虑一个层流状态的板式换热器示例,其中通过改变板的形状使传热速率最大化,如下方动画所示。相较于初始的平板设计,优化后的设计将传热效率提高了30%。
优化后的板式换热器迫使流体绕流腔体角落,如根据温度着色的流线所示。请注意,在设计的灰色表面中,变形被放大了两倍。
现在,我们来看第二个示例,湍流状态下的管壳式换热器。同样,使传热速率最大,但这次允许管的尺寸和位置发生变化。在这个示例中,优化只能将传热速率提高 5%,这可能是由于设计自由度比前一个示例低所致。
 用根据直径着色的管表示的优化后的管壳式换热器。靠近中心的直径较小的管使管与管之间的流率变化减少。
用根据直径着色的管表示的优化后的管壳式换热器。靠近中心的直径较小的管使管与管之间的流率变化减少。
拓扑优化
使用密度方法进行拓扑优化,通过为每个计算单元指派一个设计变量来实现。在结构力学中,0 对应于空缺,1 对应于固体。
希望对拓扑优化有更深入了解的读者,可阅读博客文章:使用密度方法进行拓扑优化。
换热器拓扑优化的任务是确定哪个区域应该属于哪种流体,因此通常设计变量等于 0 对应一种流体,而 1 对应另一种流体(见参考文献1)。该策略可避免两种流体混合,前提是最终设计中不存在灰度值,即设计变量仅取 0 或 1,不包含中间值。该策略可以扩展用于考虑流体间的固体域,但本文将省略此部分。无滑移边界条件通过达西惩罚项施加,类似于其他流体拓扑优化应用中使用的策略:
\mathbf{F}_\mathrm{hot} &=&-\alpha(1-\theta) \mathbf{u}_\mathrm{hot}, \quad \mathrm{where} \quad \alpha(\theta)=\alpha_\mathrm{max}\frac{q(1-\theta)}{1+\theta},
式中, 和
和  分别表示热域和冷域的流速,通过不同的偏微分方程(PDE)求解。
分别表示热域和冷域的流速,通过不同的偏微分方程(PDE)求解。 表示抑制流速的最大阻尼系数,用于确保两个流速在同一时刻不会同时过大。
表示抑制流速的最大阻尼系数,用于确保两个流速在同一时刻不会同时过大。 决定了设计变量场
决定了设计变量场  中间值的阻尼系数,较小的值通常与灰度设计最优相关,而较大的值则会产生更多离散的明确分离的区域,从而获得物理上可实现的设计。
中间值的阻尼系数,较小的值通常与灰度设计最优相关,而较大的值则会产生更多离散的明确分离的区域,从而获得物理上可实现的设计。
能量守恒通过对流-扩散方程求解,其中对流项取决于总速度场,由  的和给出。尽管该和式不明确依赖于设计变量,但在实际中,每个速度场在其对应的流体区域内占主导地位,因此流速仅在流体之间的过渡区域内具有可比性。
的和给出。尽管该和式不明确依赖于设计变量,但在实际中,每个速度场在其对应的流体区域内占主导地位,因此流速仅在流体之间的过渡区域内具有可比性。
换热器通常在湍流状态下运行,但本文展示的拓扑优化结果仅限于层流状态,因为湍流模型需要解析边界层,而对于拓扑优化中使用的均匀网格,这会导致计算成本极高。
大通道具有较低的流体阻力,小通道则能提供良好的热交换效果。因此,理想的换热器拓扑结构应由交错排列的管道组成,这些管道在实际热交换发生的狭小区域内分支为细小管道。但是由于混合约束有效地固定了拓扑结构,这种结构在二维空间中无法实现。
在二维拓扑优化中,通过使两种流体之间的热交换最大,可以得到两根弯曲的平行管道。
在三维中进行拓扑优化的计算成本很高,因此在本文最后的示例模型中,通过施加镜面对称性将设计域缩小至原来的二分之一。此外,对流场施加旋转对称性,这样只需计算其中一种流体的流动。最后,目标函数同时考虑了传热速率和水力耗散。这两个变量均需最大化,因为对于压力驱动的流体,最大化水力耗散将使水力阻力最小。目标函数可通过极大极小值公式组合,但该方法计算成本过高,因此改用 p-范数代替:
&\approx& \left[(\kappa\phi_\mathrm{heat})^{-P}+\psi_\mathrm{cold}^{-P}+\psi_\mathrm{hot}^{-P})\right]^{-1/P},
式中,权重  用于控制各目标函数的相对重要性,
用于控制各目标函数的相对重要性, 用于控制近似精度。这里展示的结果未将效率纳入目标函数(因为它会妨碍离散化设计),但初期可引入效率参数以引导设计趋向效率更高的极值点。
用于控制近似精度。这里展示的结果未将效率纳入目标函数(因为它会妨碍离散化设计),但初期可引入效率参数以引导设计趋向效率更高的极值点。
通过五个截面切片动态演示原始设计变量场,用于说明随着设计变量 的增加,优化结果逐渐趋向离散化的过程。
对优化后的结果进行平滑处理,以便能够通过显式几何表示对设计进行验证。如下方动画所示。相机位置固定,但设计结构略微透明,因此可以观察到结构内部的细节。 或者,您也可以探索下方的交互式模型文件,其中设计结构固定,相机位置可自由调整。图中仅显示了设计结构的一半,以便更清晰地观察内部的复杂细节。
优化后的换热器由两个相互交错的流体域构成,通过分支管道实现高强度热耦合,同时避免引入过大的水力阻力。
优化功能概述
这篇博客重点讨论了稳定流态换热器的优化设计,但其底层功能具有高度灵活性——基于梯度的优化方法同样适用于其他物理场问题,甚至可以将不同的物理现象结合起来,同时自动计算梯度以满足自定义的目标和约束条件。形状优化和拓扑优化接口可用于设置设计变量,探针可以简化约束和目标的设置。然而,约束和目标函数高度取决于具体的应用场景,因此建模过程的这一部分可能需要进行一些调试。最后,也可以执行考虑特征频率或瞬态问题的梯度优化。
对特征频率优化示例感兴趣的读者,可查阅博客文章: 通过形状和拓扑优化实现特征频率最大化。
关于热管理系统优化的网络研讨会
想要了解更多关于如何使用优化技术自动生成高性能的换热器和流体流动系统设计吗?欢迎参加 COMSOL 即将举行的热管理系统优化网络研讨会。此次网络研讨会将于美国东部时间 9 月 3 日星期三 15:00-15:45 举行。
参考文献
- P. Papazoglou, Topology Optimization of Heat Exchangers, master’s thesis, Delft University of Technology, 2015.
过去 50 年间,人类探索和机器人探测极大地扩展了我们对地球伴星的了解。然而,我们对月球仍有许多需要探索的地方,月球科学的一个重要方面就是了解月球的热行为。印度物理研究实验室的 Durga Prasad 博士通过建立首个此类热物理模型,将仿真与实验室实验相结合,在理解月球表面和地下温度的空间和时间变化方面取得了重大进展。
我们为什么需要了解月球表面?
辐射会对载人航天飞行产生不利影响,使宇航员致癌,月球表面的热循环会导致建造的任何栖息地产生热疲劳。因此,对月球热动力学的研究有助于选择合适的着陆点,确定设备和栖息地的稳定热条件,优化发电和热管理系统,从而为任务规划提供帮助。此外,类似的研究在帮助科学家确定水冰等潜在资源的位置,以及制定开采策略方面也发挥着至关重要的作用。这些信息还有助于深入了解月球的地质、月壤特性和内部过程,助力科学研究和我们对天体更广泛的了解。
 图 1. 一张满月照片。图片由 Gregory H. Revera 提供,获 CC BY-SA 3.0许可, 通过 Wikimedia Commons 共享。
图 1. 一张满月照片。图片由 Gregory H. Revera 提供,获 CC BY-SA 3.0许可, 通过 Wikimedia Commons 共享。
为了进一步了解月球的温度分布和热行为,Durga Prasad 博士团队着手建立一个全面的三维热物理模型,以帮助预测实际的热行为,模拟地球物理问题,并协助规划未来月球上的实验。
开发月球表面的热物理模型
Durga Prasad 博士于 2022 年发表在 Earth and Space Science 上的一篇论文中详细介绍了随后所做的努力。当时,关于月球热物理行为和热流的现有知识和测量都很有限。已知的信息都只针对赤道和中纬度地区。据了解,月球表面由导热系数较低的多孔层和密度较高的致密层组成,这对地表和地下的温度有显著影响。月球的地形在热量传递中也起着至关重要的作用,本研究也考虑到了这一点。
为了加深理解,Durga Prasad 博士建议采用实验室实验和数值仿真作为可能的研究方法。这项分析旨在通过推导月球表面和地下温度来预测月球的实际热行为,为开发这样一个综合模型迈出第一步。
模型开发过程包括创建两层横截面,用于探索温度和热通量的行为。研究人员在 COMSOL Multiphysics® 软件环境及其附加产品传热模块中使用了三维有限元方法。这种方法能够准确地表征月球表面的复杂几何形状,并确保模型适用于小尺度到大尺度的模拟。
考虑关键参数和地形的影响
为了准确模拟月球表面和地下的热物理行为,必须考虑适当的参数值和边界条件。密度、热导率和比热容等参数并非恒定不变,而是相互依存的。包括密度在内的关键参数是根据以往研究得出的关系式定义的。导热系数和比热容是通过温度相关函数(理论曲线拟合)推导出的。此外,还使用了一个半正弦函数来表示太阳热通量的昼夜变化。
Durga Prasad 博士模型的一个重要方面是纳入了月球的地形变化及其对热量交换和热物理行为的影响。传统的一维模型提供了一个全球视角,但无法模拟局部和区域尺度的现象。通过数字高程模型(DEM)数据纳入月球表面的实际地形(图 2),可以更真实地反映月球的热行为。
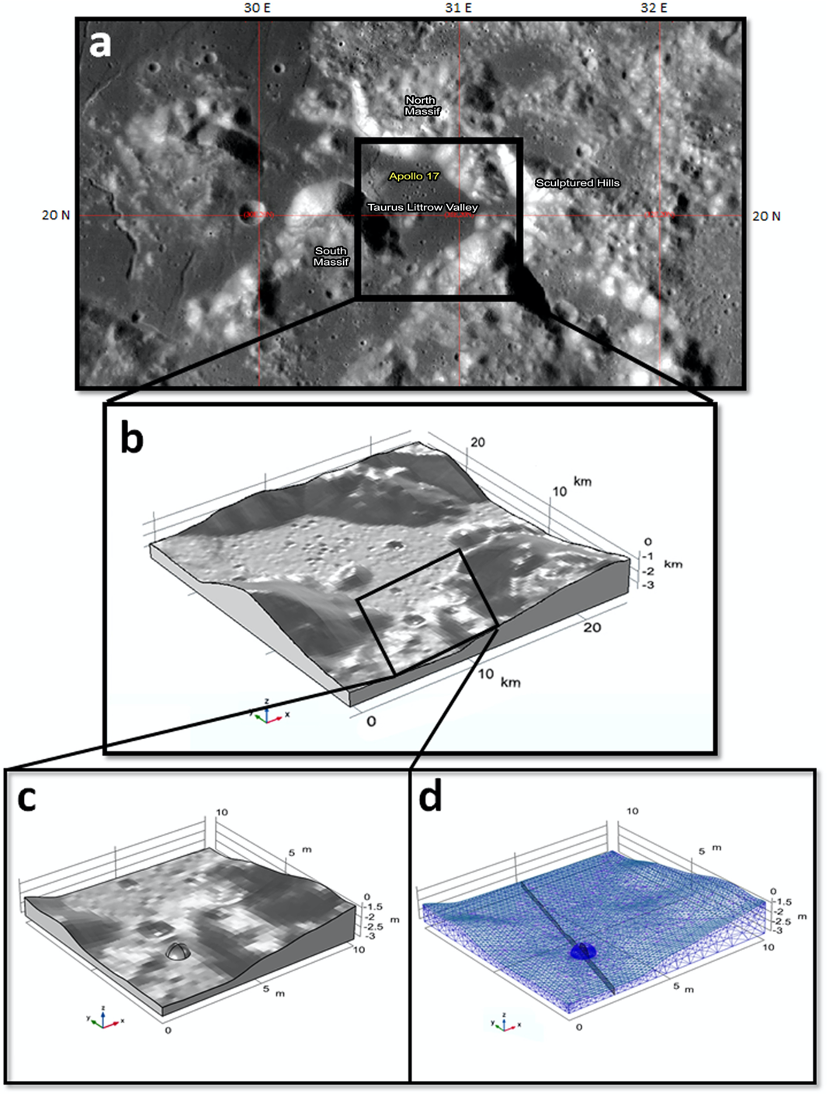 图 2. (a) Taurus–Littrow 山谷和阿波罗 17 号着陆点 (b) 区域尺度模拟所考虑的关注区域 (c) 为局部尺度模拟创建的人工 DEM 几何图形 (d) 划分网格的几何和 y-z 切面。
图 2. (a) Taurus–Littrow 山谷和阿波罗 17 号着陆点 (b) 区域尺度模拟所考虑的关注区域 (c) 为局部尺度模拟创建的人工 DEM 几何图形 (d) 划分网格的几何和 y-z 切面。
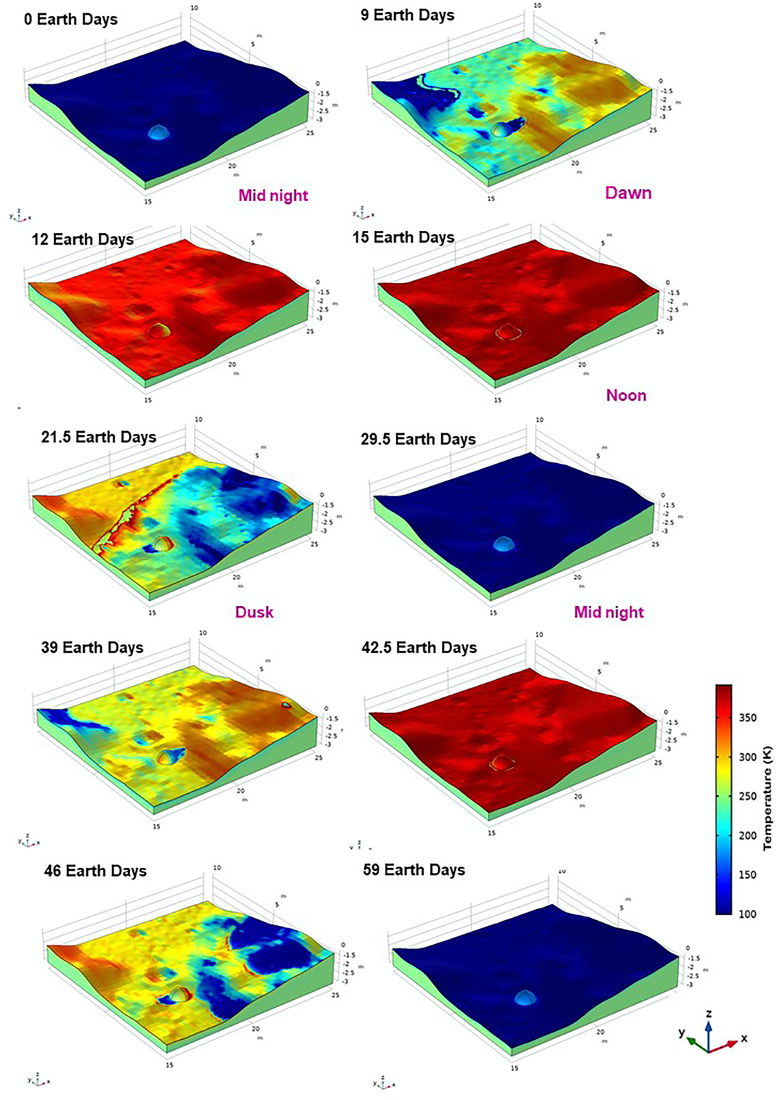 图 3.基于模型计算的月球日选定时段的局部尺度表面温度三维图。
图 3.基于模型计算的月球日选定时段的局部尺度表面温度三维图。
Durga Prasad 博士开发的模型是独一无二的,也是全球首个此类模型,它成功地考虑了地形变化,从而能够表征月球表面不同位置的温度分布。团队利用实验室实验和阿波罗 17 号的现场数据对模型的结果进行了验证,证实了月球表面热结构(包括最上层的厚度)作为影响月球表面和地下温度变化的关键参数的重要性。
未来的月球研究
Durga Prasad 博士的研究标志着我们在推进对月球局部热物理行为的理解,以及对未来月球探索任务规划的针对性调查方面迈出了重要一步。通过建立一个完整的三维热物理模型,他对月球表面和地下的温度变化提出了宝贵的见解。这项研究对未来的月球探索任务具有实际意义,有助于选择合适的登陆点、优化热管理系统和促进资源利用。此外,该模型还加深了我们对月球地质、月壤特性和内部过程的了解。
参考文献
- K.D. Prasad, V.K. Rai, and S.V.S. Murty, “A comprehensive 3D thermophysical model of the lunar surface,” Earth and Space Science, vol. 9, 2022; https://doi.org/10.1029/2021EA001968.
延伸阅读
Jan Czochralski 在研究金属结晶的速度时,将装满熔融锡的热坩埚放在桌子上冷却。他专心致志地工作,不小心把笔插入了熔融的锡里,而不是墨水瓶中。注意到自己的失误后,Czochralski 把笔拔了出来,却发现笔尖上挂着一条凝固的金属丝……
直拉法背后的历史
后来,Czochralski 证明了这种凝固金属是单晶体。将近 110 年后,他的简单失误被公认为直拉法奠定了基础。该方法是制备单晶硅的最重要方法之一,而单晶硅是一种广泛应用于电子产品制造的材料。
如今,直拉法采用的工艺与 Czochralski 意外的钢笔蘸取过程类似。首先,在坩埚中熔化高纯度的半导体级硅。然后,加入掺杂的杂质原子,使硅掺杂变成正型或负型硅。接着,把固定在一根棒上的籽晶浸入到熔化的混合物中,并在氩气的惰性气氛里小心地向上提拉,同时进行旋转。最后,熔融物会在籽晶上形成一根大的圆柱形单晶锭。
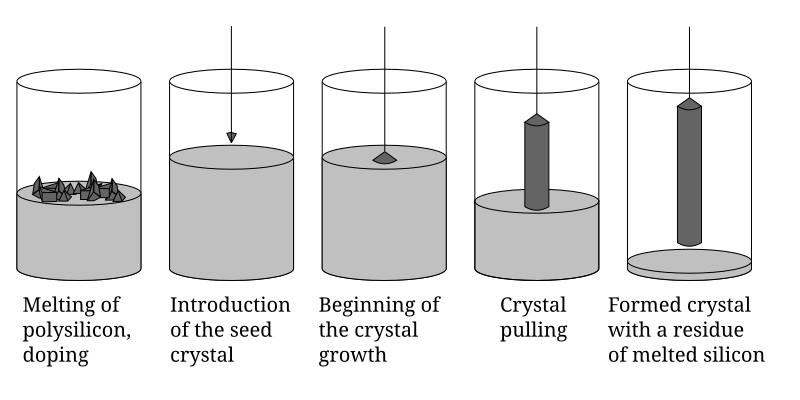 直拉法的各个阶段。这张照片已进入公有领域,通过 Wikimedia Commons 共享。
直拉法的各个阶段。这张照片已进入公有领域,通过 Wikimedia Commons 共享。
Czochralski 探索了使用锡、铅和锌等金属制造晶体的方法,并于 1917 年发表了有关该方法的论文。这篇论文和方法一经发表便引起了人们的极大兴趣,但直到 20 世纪 40 年代末,这种方法才成为如今的主流技术。这在很大程度上要归功于贝尔实验室的研究人员,他们重新发现了这种方法,并利用它生产硅和锗晶体以开发半导体。从那时起,直拉法就成为半导体工业的基石。

波兰化学家Jan Czochralski,1929 年在华沙理工大学担任教授时的照片。这张照片属于公有领域,通过 Wikimedia Commons 共享。
直拉法是制备单晶硅(mono-Si)晶锭最常用的方法。该方法可以制备出长达 2 米的晶体锭,之后这种晶体锭可被切割成标准尺寸的晶圆。这些晶圆可用于制造集成电路,在光伏领域则用于制造太阳能电池。在这篇博客中,我们将探讨如何使用 COMSOL Multiphysics® 软件模拟保护气体流动和对流传热,以维持晶体生长界面所需的温度梯度。
典型晶体生长炉的模型定义
通过精准调控加热功率、拉速和晶体旋转速率,可以有效控制晶锭的形状,尤其是直径。可以在原型阶段对这三个因素进行调整,但必须使用昂贵的物理材料。作为这些实验的补充,建模和仿真可用于虚拟复制、监控和更改设计,从而减少所需的物理实验次数。
查看在软件中建立的热传导(左)和热辐射(右)模型。
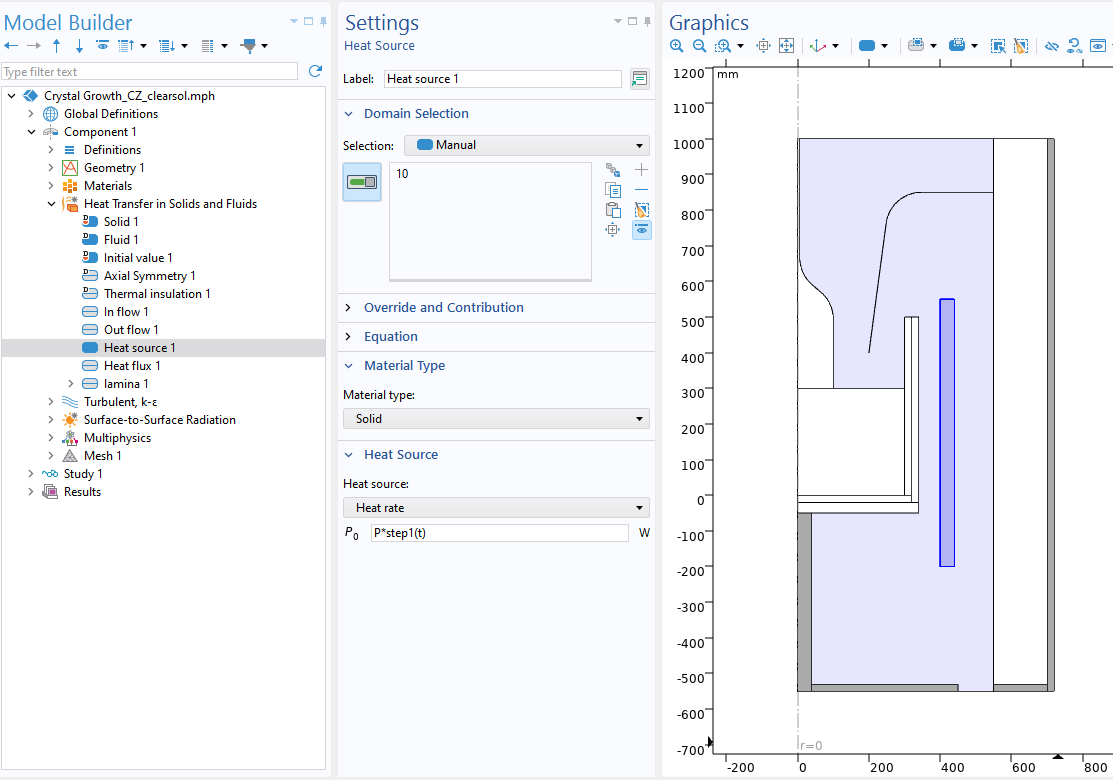
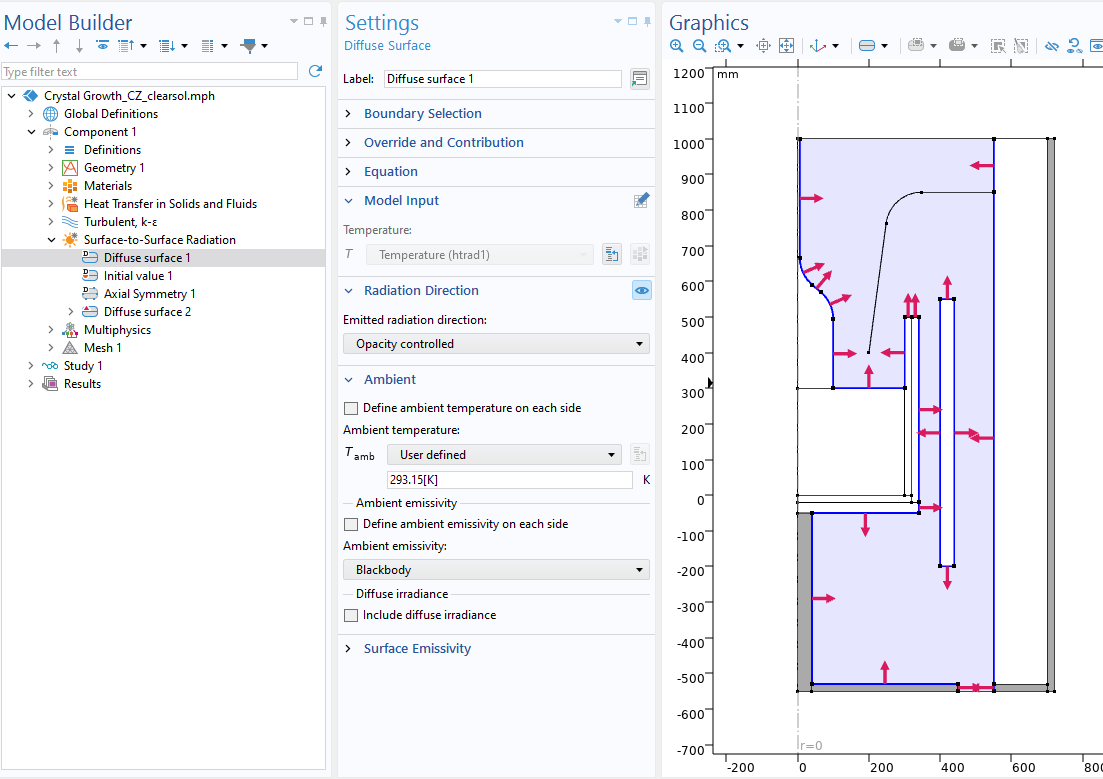
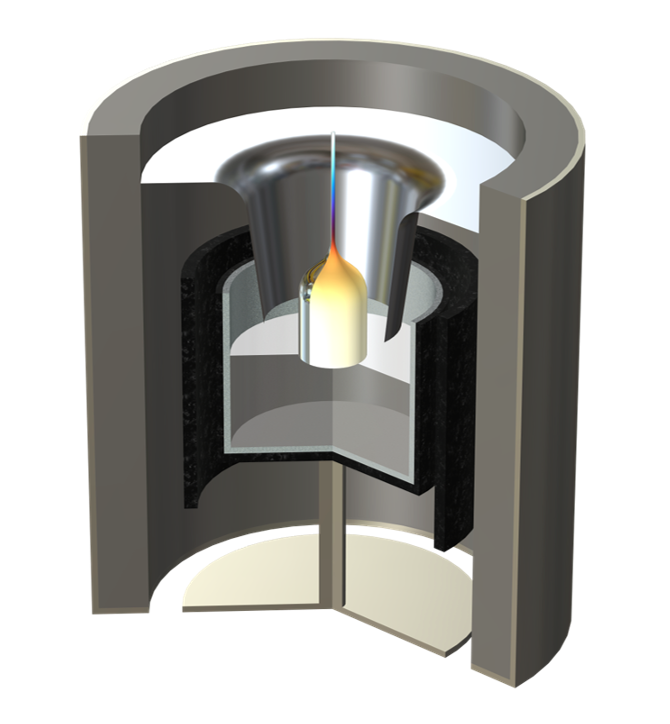
直拉法晶体生长炉的热分析教程模型模拟了上述过程。该模型的几何结构包括一个装有熔体的石英坩埚和一根位于熔体表面中间的晶棒,二者均放置在生长炉内。在生长炉内,氩气流冷却晶棒,以维持所需的温度梯度,并将挥发性物质排出炉外。炉内放置了一个石墨加热器,用于维持稳定的温度。坩埚和晶棒均以 5 r/min 的速度旋转,但方向相反。上述过程的整个几何结构具有旋转对称性,因此可以在 COMSOL Multiphysics® 中使用二维轴对称模型创建。
假设热传导是主要的传热机制,对熔体、晶棒、石墨加热器和炉壁的热传导进行模拟。炉内表面之间的热传导由表面对表面辐射模型计算。炉内氩气的非等温流动采用弱可压缩流假设进行建模,同时将 k-ε 湍流模型和湍流中的热传递相耦合。晶棒和坩埚的旋转则使用滑移壁条件描述。
此模拟的重点是研究保护气流和对流传热,找出维持晶体生长界面所需的温度梯度和最佳参数。
使用COMSOL模拟的晶体生长炉模型。
在模型几何结构内部,石墨加热器的功率为 310 kW,保护性氩气的引入速度为 100 L/min。炉压保持在 2500 Pa。坩埚以 5 r/min 的速度正向旋转,晶体棒以 5 r/min 的速度逆向旋转,从而产生有效晶体生长所需的扭转运动。这种熔炉的旋转速度远高于拉速,因此本模拟忽略了拉速。
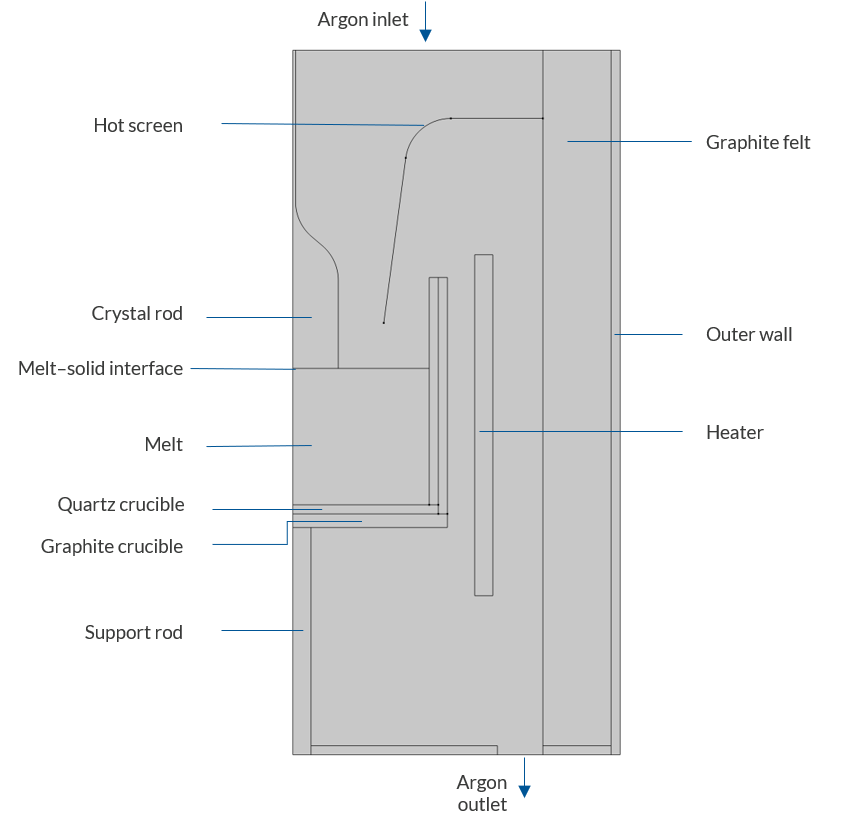 标注了各个部件的晶体生长炉几何图形。
标注了各个部件的晶体生长炉几何图形。
结果讨论
在模型中,我们进行了两步研究。第一步是求解稳态流动方程,为随后的瞬态研究步骤建立良好的初始条件。在瞬态研究步骤中,流动方程和传热方程是完全耦合求解的。
流场
仿真计算得出的流场显示,晶棒表面附近的流速最大。热屏和晶棒之间存在一个回流区,该回流区主要由热屏高温产生的浮力驱动形成,来自入口的轻微向下流动也对其产生一定影响。这种高速运动有利于有效散热,从而在晶棒内形成明显的温度梯度。
坩埚和加热器之间的水流向下流动,这与直觉相反,因为人们可能会认为这一区域会产生烟囱效应。但实际上这种效应发生在加热器外部,即加热器和炉壁之间,那里的水流主要是向上流动的。
值得注意的是,炉内自由对流的影响比氩气的入口和出口流动的影响更为显著,后者在图中几乎无法辨别。如果没有模型,预测整个流场将非常困难。
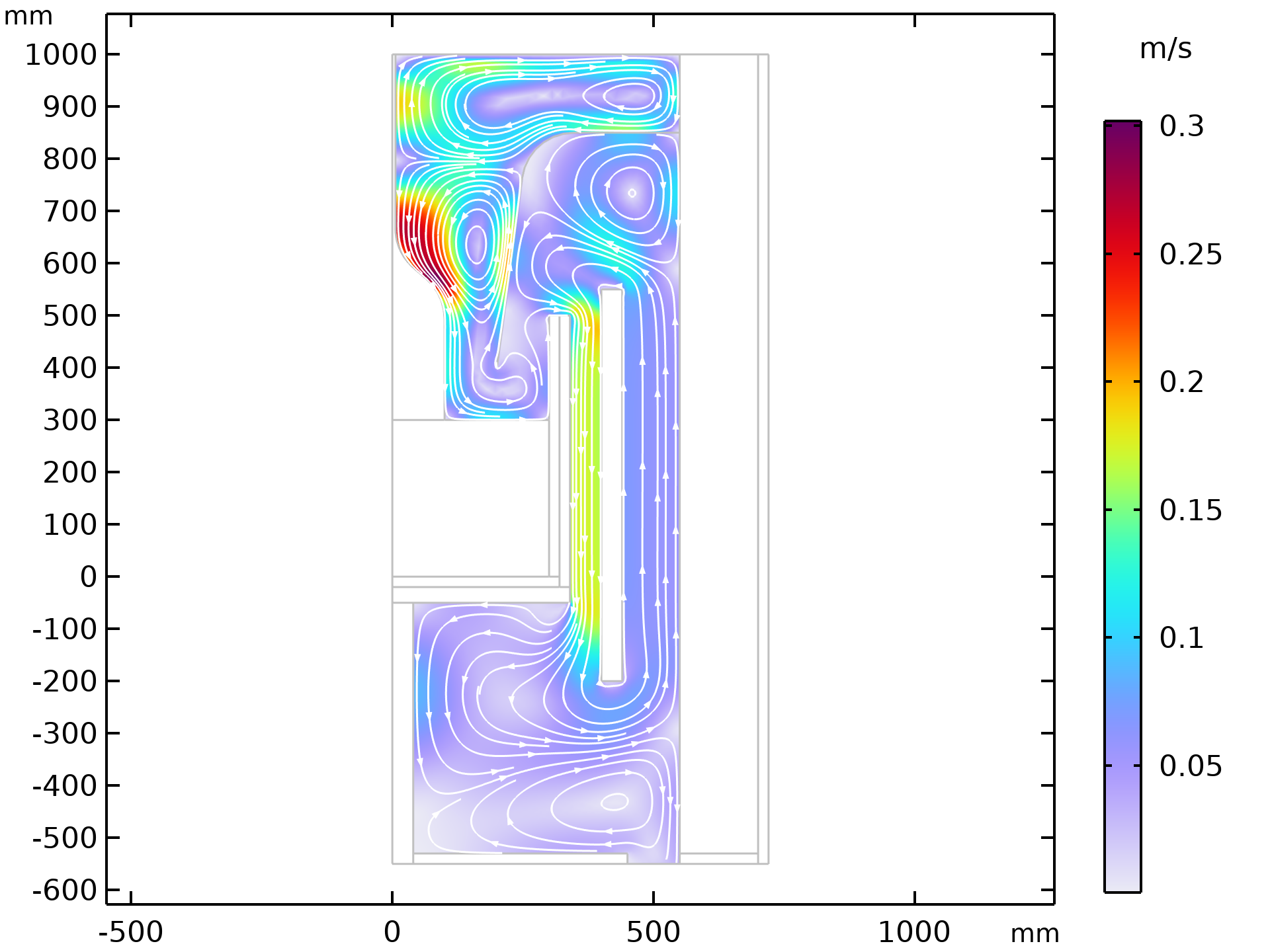 炉内流场图。
炉内流场图。
温度
我们的研究表明,熔体与晶棒接触面的平均温度在大约 400 分钟后达到稳定状态。熔化温度(Tm=1414 °C)等值线靠近该接触面,见下图中的 1415 °C 等值线。晶棒与熔体接触点的温度在 1403—1407.5°C 变化,最高温度出现在晶棒的中部,接近于 1414 °C 的实际熔化温度。温度沿晶棒高度方向逐渐降低,在 Z 方向上呈现出 500—100 °C/m 的温度梯度。这表明氩气流对单晶棒进行了有效冷却。
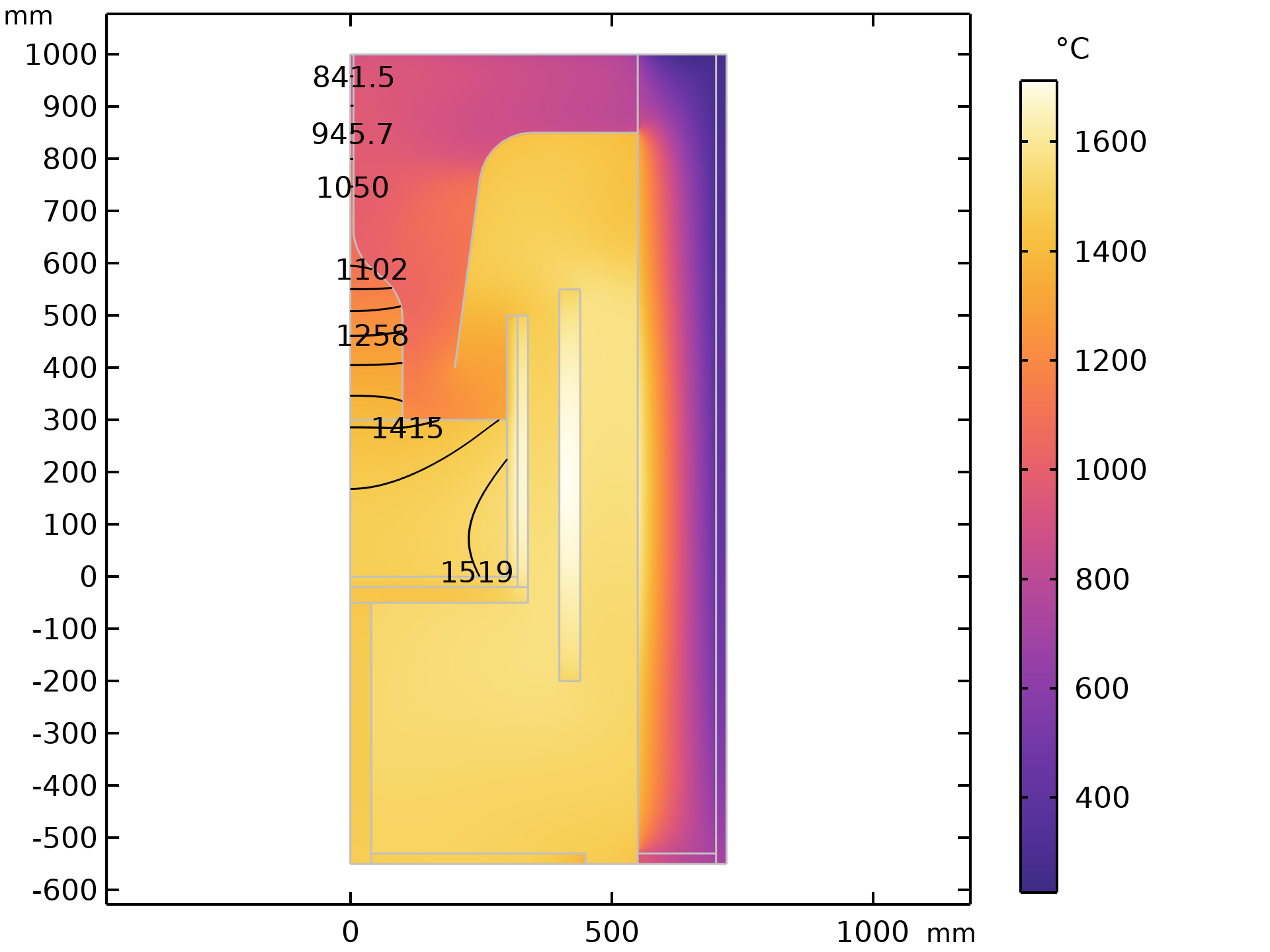
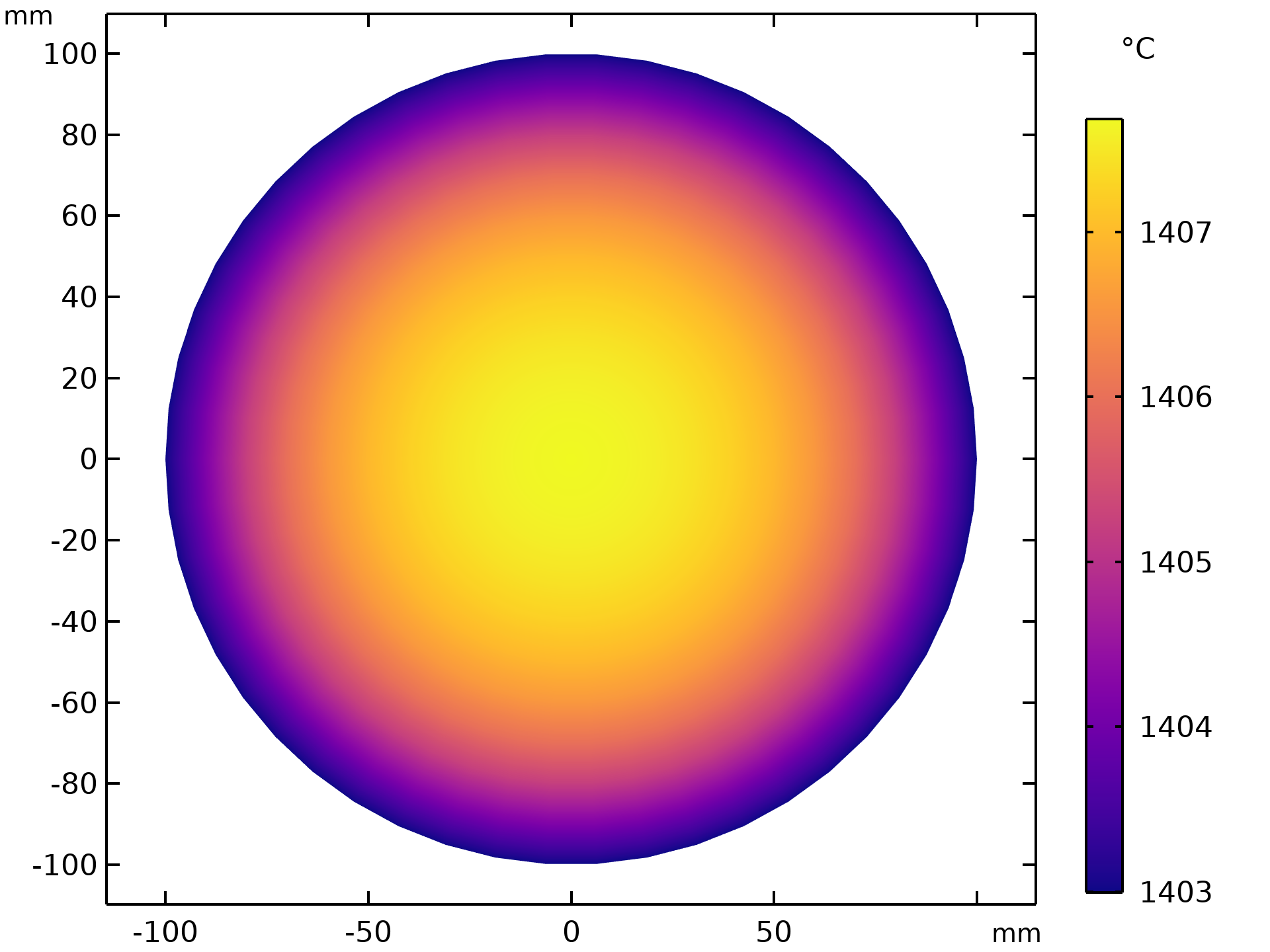
左图:突出显示了 600 分钟时平均温度的模型图。右图:晶棒与熔体接触面的温度分布。
晶体炉模型的扩展
借助上述仿真模型,我们将晶体和熔体模拟为固体,并在设计阶段进行了热分析。该模型既可以实现这一目标,也可以进行扩展。例如,您可以对其他加热方式(如感应加热)进行模拟。更复杂的扩展可能还包括重点模拟熔体中的流动及其内部的自然对流、表面对流(马兰戈尼效应)和强制对流(磁性流体)。您还可以使用 相变 接口查看从熔体到晶体的相变,以及晶体潜热和拉力的凝固过程。虽然本演示中忽略了晶体提拉速度,但您也可以在壁边界条件中设置该速度,即切向的移动壁速度。
动手尝试
想自己亲自动手尝试模拟这个 Czochralski 晶体生长炉吗?COMSOL 案例应库中提供了相关的 MPH 文件和分步说明,欢迎下载。
当一束准直光(如激光)入射到半透明介质上时,会发生吸收和散射,即一部分入射光被转化为热能,一部分被改变方向。在特定条件下,这两种现象都可以通过 COMSOL Multiphysics® 软件中的扩散近似来模拟。这种模拟方法在激光加热活体组织和材料加工中均有应用。接下来,我们来了解更多内容!
定义半透明介质
半透明介质是指光在其中能传播相当长一段距离,直至在吸收和散射的作用下逐渐消失的任意一种材料。吸收是通过将光能转化为热能,从而导致温度升高的机制。散射是通过将光重新定向到其他方向的机制。光的散射有多种形式:一种极端情况是发生在镜子和电介质表面的镜面反射和折射,而另一种极端情况则是几乎都为各向同性散射,如在非常浑浊的水等浑浊介质中观察到的散射,其中浑浊是由一些形状和方向随机的小悬浮颗粒造成的。

一束准直光入射到半透明介质时,会发生各向同性散射,这意味着光会被等量地重新定向到各个方向。这种散射发生在任一光束路径,而且散射光本身也会立即重新散射,因此这幅图呈现的是这一过程的简化视图。
需要注意的是,基本上所有真实材料都会展现出一定程度的各向异性散射,也就是说,光会被优先定向到某些方向。不过,在一些应用中,散射可以被近似为各向同性,这就是我们今天要讨论的情况。考虑一束入射到材料上的准直光(激光束),其中光强的变化通过各向同性散射系数和各向同性吸收系数量化。
建模方法
为了理解建模方法,我们首先假设材料没有散射只有吸收。对于这种情况,我们可以使用传热模块的 吸收介质中的辐射束 接口模拟,即在材料内部求解比尔-朗伯定律。使用该接口时,假定光束在受照边界的强度已知。也就是说,考虑一束已知功率的光通在自由空间中传播,并基于传播到材料中的光的比例指定光强度。
该接口求解以下方程:
式中,  是描述光束方向的矢量,在垂直于光束路径的平面上测量的
是描述光束方向的矢量,在垂直于光束路径的平面上测量的  是光的强度,用单位面积上的功率表示。可能存在多种不同空间的重叠入射光束,每个入射光束都需要求解一个以
是光的强度,用单位面积上的功率表示。可能存在多种不同空间的重叠入射光束,每个入射光束都需要求解一个以  为指数的方程。 为吸收系数,用于量化这些光束的吸收情况。吸收的能量为所有入射光束的总和
为指数的方程。 为吸收系数,用于量化这些光束的吸收情况。吸收的能量为所有入射光束的总和 。该接口假设所有吸收的光能都转化为热能,但我们通过简单地修改接口设置,可以将散射也考虑在内。
。该接口假设所有吸收的光能都转化为热能,但我们通过简单地修改接口设置,可以将散射也考虑在内。
我们可以将非零散射系数  添加到 吸收介质中的辐射束 接口使用的吸收系数中,因此
添加到 吸收介质中的辐射束 接口使用的吸收系数中,因此  。吸收的能量便可以分解为吸收部分
。吸收的能量便可以分解为吸收部分  和散射部分
和散射部分  。
。
接下来,我们需要计算散射部分的光如何在介质中传播,同时考虑光在各处都会被吸收和再散射。这时,可以使用传热模块的 吸收-散射介质中的辐射 接口中的P1 近似解方程求解:
式中,  为每单位立体角的光辐射强度,也就是说它包含所有方向的光,而不仅仅是单一方向的光。光能向热能的转换由等式右边导致辐射强度降低的
为每单位立体角的光辐射强度,也就是说它包含所有方向的光,而不仅仅是单一方向的光。光能向热能的转换由等式右边导致辐射强度降低的  量化。源项
量化。源项  导致辐射强度的体积增加,在这种情况下,源项来自 吸收介质中的辐射束 接口计算的散射损耗部分;因此,
导致辐射强度的体积增加,在这种情况下,源项来自 吸收介质中的辐射束 接口计算的散射损耗部分;因此, 。
。
在求解散射光时,除了控制方程,还需要设置一系列材料的边界条件。鉴于入射激光可以进入建模域,因此可以合理假设散射光能离开建模域。对于这种情况,可以使用 半透明表面 功能求解,该功能允许输入发射率  和漫透射率
和漫透射率  。这两个量必须小于或等于 1,并可以定义漫反射率
。这两个量必须小于或等于 1,并可以定义漫反射率  。如果
。如果  ,入射到该边界上的散射光将完全穿过该边界;如果
,入射到该边界上的散射光将完全穿过该边界;如果  ,则入射光将部分漫反射回域中。
,则入射光将部分漫反射回域中。
建模细节
为了在 COMSOL Multiphysics® 中建立这样的模型,我们可以将 吸收介质中的辐射束 接口和 吸收-散射介质中的辐射 接口耦合使用。前一个接口只需在入射光路径周围的子域中求解。使用 吸收介质中的辐射束 接口,需要对吸收系数进行修改,以同时包含散射和吸收系数。因此,在计算结果时,减去吸收部分的吸收热量非常重要。

通过 吸收介质中的辐射束 接口中的 吸收系数 计算准直光的吸收和散射。
吸收-散射介质中的辐射 接口允许:1) 分别添加吸收系数和散射系数 2)使用 辐射源 功能添加一个源项,用于表征 吸收介质中的辐射束 接口吸收热量的散射部分。

将 吸收介质中的辐射束 接口的散射光与 吸收-散射介质中的辐射 接口相耦合。
在模拟结果方面,计算入射光的热损耗、散射光的热损耗以及入射光和散射光离开建模域的比例的积分有助于深入理解所模拟的现象。下图和表格显示了这些损耗和积分的分布,损耗分布随后可用于传热分析中计算温度的变化。

入射光(左)和散射光(右)的热源分布。这些热源的总和导致温度的升高。
| 入射光,吸收功率 | 0.49 W |
| 散射光,吸收功率 | 0.35 W |
| 散射光,出射功率 | 0.14 W |
| 入射光,出射功率 | 0.02 W |
| 总和 | 1.00 W |
热损耗和辐射损耗的积分表。损耗的总和应该等于入射光的功率。
注意事项和结束语
如上所述,在COMSOL 中建立光的吸收和散射模型非常容易,但需要强调的是,这种方法有两个局限性。首先,材料内部的任何镜面反射或折射(例如由于镜子或透镜引起的反射或折射)都无法求解,因此只能模拟非常均匀的材料。其次,假定介质内部的散射是各向同性的。这些局限可以通过简单计算的优势来弥补:通过求解两个标量方程组计算平行光和散射光的强度,计算成本非常低。此外,还可以轻松地将源项与热分析相结合来计算温度上升。因此,如果您要模拟激光与半透明材料的均匀样品的相互作用,并且可以假设为各向同性散射,这种高效的方法将非常有吸引力。
下一步
点击下方按钮,进入 COMSOL 案例库,尝试自己动手模拟文中介绍的接口功能:
芬兰是桑拿的故乡。其实,“桑拿(sauna)”这个词是芬兰语,在英语和其他语言中用于表示一个体验热的小房间。除了在芬兰受欢迎之外,桑拿在世界上许多地方都很受欢迎。传统的桑拿房使用电炉或燃木炉加热,提供的干热可能达到或超过 100°C(212°F)。在这篇博客中,我们将使用 COMSOL Multiphysics® 软件创建的模型来研究这种桑拿房的加热和温度分布。
桑拿的物理特性
干式桑拿房通常是一个覆盖着如杨木、雪松或松木之类木材的小房间,房间内至少配置了两个不同高度的木凳。房间通过火炉加热。由于热空气膨胀导致其密度较低,所以桑拿房内最热的部分是靠近天花板的位置。如果你想体验温和一点的热量,可以坐在较低的长凳上,这样更接近地面。

一个传统的桑拿房。
通常炉子的顶部会覆盖一些石头(桑拿石),它们的温度会升高并向房间辐射热量。这些石头能够吸收并保持热量,发挥着重要的作用。你也可以向热石头上加水(这在北欧国家很常见),来释放蒸汽。这样可以增加湿度,并在在人的皮肤上短时间内引起强烈的热感,但皮肤的温度仍保持在露点以下。然而,只有在干热的环境下,才有可能享受超过几分钟的真正的热桑拿(高达或超过 100°C)。干热的环境能使更多的水分从皮肤上蒸发,防止身体过热。
桑拿房内发生的物理现象主要包括传热和流体动力学:传热是通过对流和辐射产生的,而热对流是由通风和浮力引起的空气运动驱动产生。桑拿房通常包含使空气流通的进气口和出气口。在湿式桑拿房中,水分含量和湿度也是很重要的物理特性,但在这篇博客中,我们将重点讨论干式桑拿房及其加热和温度分布。
桑拿炉有许多不同的类型和尺寸,使用什么型号的桑拿炉取决于桑拿房的大小。从小型家用桑拿房使用的约 5kW 功率到大型商业桑拿房使用的高达 20kW 功率,桑拿炉的功率范围变化较大。有时,烧木材的桑拿炉可以产生比电动桑拿炉更高的加热功率。然而,燃木桑拿炉的实际加热功率取决于用来生火的木材的数量、类型和质量。现代电热桑拿炉内置有恒温器,因此温度可以保持在一个理想的数值。

一个桑拿炉。
以下是桑拿炉加热过程中,我们关注的一些特性:
- 从开启或点燃桑拿炉到桑拿房达到所需温度需要的时间。如果知道需要多长时间,就会知道你有多少时间为体验桑拿浴做准备。
- 桑拿房内的热量分布,特别是凳子上。这样蒸桑拿的人就能找到一个舒适的温度。
模拟桑拿房的热分布
作为基准模型,我们对博客作者家里的桑拿房做了一些测量,这个房内刚好有一个烧木柴的炉子,但没有恒温器。点燃柴火后,通常需要 35~40 分钟(在正常室温下),顶层长凳的温度可达到 70°C 左右(158°F)。
桑拿模型
桑拿房内的传热物理模型本质上是一个多物理场模型,它的模型域(桑拿房内的空气、桑拿房的炉子和桑拿房的墙壁)中包括以下类型的物理场:
- 流体(空气)中的热传递:桑拿房内空气中的温度场。包括该模型的主要物理量,即空气温度。
- 湍流:桑拿房内流动的空气。它是对流传热的驱动力,使用一个湍流模型计算空气的速度场。
- 表面对表面辐射:来自炉子和桑拿房墙壁的热辐射(即通过电磁波传递热量),对桑拿房的整体温度有所贡献。用于计算出表面辐射率,即来自表面的热辐射,单位是 W/m2(SI 单位)。
还包括以下边界条件:
- 一个空气流出口。为了通风,桑拿房通常包括一个使空气流向建筑物外的小出风口。
- 一个空气流入口。来自通风或向周围房间的一些开口的空气流入。
- 通过墙壁的热通量。通过墙壁的热通量将取决于墙壁的类型和周围的温度。大多数情况下,桑拿浴室的墙壁是用木板覆盖的,但部分也可以是纯混凝土墙。有时,至少有一面墙壁是与外部空气接触的外壁面,外面的空气可能明显更冷(例如,在北欧国家的冬季)。在这个模型中,使用单独的热通量-外部 和热通量-内部 节点来考虑较冷的外部温度(10°C; 50°F)。室内温度被设定为 20°C (68°F)。
- 在加热器(桑拿炉)的顶部有一个使用了 10kW 加热功率的边界热源,但加热器的启动时间只有 10 min。使用一个表达式来描述恒温器边界,如果天花板的平均温度达到 100° C,就会关闭加热器,但在这个桑拿房模型中,以及在现实中并不会达到这样的高温。
这个模型必须考虑的物理参数包括材料属性、桑拿炉特性、整个桑拿房内部的尺寸和位置以及炉子和长椅。获取这些信息后,我们就可以开始使用 COMSOL Multiphysics 和传热模块来建立桑拿房模型,这个产品模块是建立湍流和表面对表面辐射模型所必需的。
在 COMSOL Multiphysics® 中创建模型
设置模型
第一步是创建一个代表桑拿房的内部和周围的墙壁的三维几何结构,也就是模型的外部边界。下图所示就是包含桑拿炉、长椅、进气口和出气口的三维桑拿房几何结构:


桑拿房的几何结构,其中天花板和门被隐藏起来。加热器和进水口位于右侧,长椅和出水口位于左侧。左边的墙是外墙;其他墙是内墙。
在桑拿房温度计所在的后墙上的一个点上定义了一个域点探针 功能,以便在瞬态模拟中能直观地看到温度计位置的温度上升。
接口
将要设置的COMSOL Multiphysics 模型必须能实现上述所有物理场,这可以通过三个物理场接口完成。第一个是固体和流体传热 接口,用于包括桑拿房内的对流传热,其中墙壁是固体,桑拿房内的空气是流体。
第二个接口是湍流,代数 y+ 接口,用于描述桑拿房内空气的湍流情况。该接口使用了一个代数 y+ 湍流模型,即一个基于近壁距离的代数湍流模型。代数 y+ 湍流模型基于普郎特混合长度理论建立,适用于内部流动建模。
最后,使用表面对表面辐射 接口来实现炉子和墙体边界之间的辐射热交换(内部空气并不显著参与辐射热交换)。
节点和材料
使用两个多物理场特征节点来耦合空气流动和热传递(非等温流动),以及表面到表面辐射和空气中的热传递。一个是非等温流动节点。这个节点耦合了湍流、k-ε 和流体传热 接口,用于模拟流体属性取决于温度的流体流动。另一个节点是表面对表面辐射传热,它耦合了墙体的表面对表面辐射和空气中的对流传热。在这个示例中,需要考虑到边界上的辐射传热,而周围的介质不参与辐射。
此外,模型中还使用了以下四种材料:
- 空气,包含了与温度和压力有关的空气材料属性(COMSOL内置材料库中包含这些参数)。
- 混凝土,用于桑拿房墙壁的材料
- 木材(松木),覆盖桑拿房墙壁内部的材料,也是长椅的材料。
- 辐射墙,一个额外的用户定义的材料,用于定义边界上的表面辐射率。
添加了流出 和流入 节点,分别代表热量的流入和流出。另外,在墙体边界上有一个热通量 节点,用于添加由外部温度和传热系数定义的热通量。最后,使用边界热源 节点模拟桑拿炉。为了对加热过程进行建模,使用了一个温度一旦超过 100°C 时就会关闭加热器的恒温器和一个持续 10min 左右的平滑启动阶段的表达式。用于描述边界热源的表达式是 10[kW]*flc2hs(100[degC]-aveop1(T),10)*flc2hs(t-t_heater/2,t_heater/2),其中第一个系数 10[kW],代表炉子的额定加热功率。第二个系数使用内置函数 flc2hs,这是一个平滑的 Heaviside 函数,具有连续的二次导数,没有过冲,用于确保如果平均天花板温度接近 100°C,加热器就会关闭。在我们的例子中,没有达到这个温度,所以第二个系数等于 1。最后,第三个系数, flc2hs(t-t_heater/2,t_heater/2),用于描述一个围绕 t_heater 的平滑启动,在启动时间之前和之后的 t_heater/2 之间持续平滑。下图显示了热功率与时间的关系:

加热器的功率在大约 10min 内从 0 上升到其额定值 10kW。
研究
使用该模型进行了三项研究。第一项是含初始化的稳态研究,包括用于计算湍流的壁距离倒数的壁距离初始化 研究步骤,以及用于计算气流的稳态起始解的稳态 研究步骤。在这个步骤中,固体和流体传热 以及表面到表面辐射接口 没有被激活。
第二项研究包含主要的瞬态 研究步骤。该研究包括前面提到的三个物理场接口和两个多物理场耦合。在瞬态 研究步骤的设置中,用分钟作为时间单位,输出时间设置为 range(0,0.5,60),这是 COMSOL Multiphysics 的表达方式,即每 30s 输出一次解,持续一小时。(求解器的实际时间步长由容差控制,与选择的输出时间无关)。计算不是从零速度开始,而是从第一次研究得到的速度场开始,它计算了通风引起的初始速度场。这个研究步骤在一台性能好的电脑上计算大约需要 45~55min。在此期间,可以利用 COMSOL Multiphysics 中的求解时绘图和探针功能监测域内的气流和温度,以及桑拿房内温度计位置的温度。
第三项研究是为了方便运行而添加的。它包含两个研究引用 节点,一个引用研究1 ,另一个引用研究2 。因此,通过运行第三项研究,可以按顺序运行前两项研究。
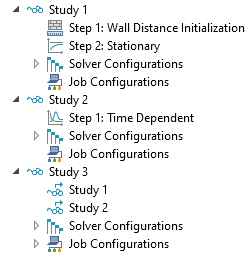
桑拿模型中的三项研究:第一项用于壁距离初始化;第二项用于瞬态模拟;第三项是为了方便地运行这两项研究。
温度分布结果
我们要看的主要结果是 60min 后桑拿房内的温度变化,可以在下面的切面图中看到:

加热 60min 后,桑拿房内的温度分布。最高温度为 339° C (642°F),是在加热器的顶部,而进风口则保持在 10°C(外部温度)。
为了更好地了解桑拿房内的垂直温度差异,我们可以限制数据和颜色范围,只显示 10 到 100°C 之间的温度。下图显示,从地板到顶部的长凳有一个明显的温度梯度:

该图显示,顶部长凳的温度约为 70°C,但底部长凳的温度只有 30-40°C(86-104°F),因此,如果你愿意,可以移到较低的位置避免过热。
域点探针 功能的温度折线图显示,在安装桑拿温度计的地方温度是如何上升的:

桑拿房温度计位置的温度与时间的关系。温度上升得相当快,但如果你想在享受桑拿浴前使温度上升到70°C,必须等待 30min 以上,这与作者的经验相一致。
为了进一步探索这个多物理场模型,还可以尝试改变炉子的加热功率、环境温度、材料属性、长凳位置以及其他可能影响桑拿房内加热和温度分布的参数。
结语
文章介绍了如何利用 COMSOL Multiphysics 模型解释和探索桑拿房的加热问题。还可以使用类似的模型模拟热量和水分传输(HAM),用于改善和优化一般建筑物的供热以及其他供热应用。以下是使用 COMSOL Multiphysics 和传热模块建立的基于热量的模型的例子:
- 有火炉的房间内的传热:这个模型显示了火炉对房间不同表面的辐射强度。
- 建筑结构中的热桥 – 两层楼之间的三维结构:这个例子与欧洲标准 EN ISO 10211:2007 中描述的建筑结构中的热桥基准案例3相对应。
- 木质框架中的冷凝风险:这个二维稳态模型计算了 HAM 在由不同吸湿材料组成的壁中的传输。
- 热量和水分在半无限壁中的热湿传递:HAM 模型被定义为标准 15026:2007 附录A中的一个基准案例。
使用聚焦激光快速加热材料常被用在在各种应用中,包括半导体加工行业。这篇博客,我们将研究具有周期性脉冲强度的高斯轮廓激光束,来加热沉积在硅衬底上的两种不同的半透明材料。为了建立此模型,我们将使用温度场和比尔-朗伯定律求解一个多物理场建模问题。接下来,让我们进一步探讨这个模型,看看如何设置它。
高斯轮廓激光束照亮硅晶圆
我们将以一个直径为 2 英寸(约 5cm)的硅晶圆为例,如下图所示,该晶圆的中心有两种不同的材料,每种材料厚度为 100μm,半径为 1cm。晶圆从顶部被一束高斯轮廓激光热源照射,该热源在时间上被快速脉冲化。这两种材料在 700nm 的激光波长下都是半透明的,但在更长波长的红外辐射下是不透明的。硅衬底是掺杂的并且在所有波长下都是高吸收性的。
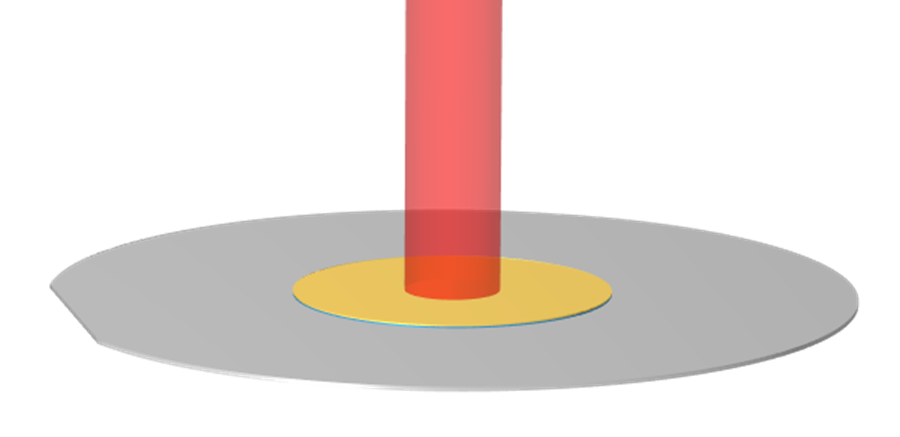
脉冲激光在不透明晶圆上照亮了两层半透明材料。
由于所有材料都具有与入射光束垂直的平面边界,所有入射光都将沿平行于入射光束的均匀方向传播。材料之间的界面会有反射,但没有折射或衍射。两层材料的厚度都远大于波长,因此我们可以假设相干长度远小于层厚度。我们可以使用比尔-朗伯定律来解决这个问题,该定律描述了半透明介质中光的衰减。该方程使用 COMSOL Multiphysics® 软件中的吸收介质中的辐射束 接口求解。但是,由于存在反射,我们需要仔细研究一些细微差别。
了解物理场并设置模型
由于沉积层是圆形的,并且由于激光聚焦在中心上,我们可以忽略晶圆平面并将模型视为完全轴对称的。这使我们能够将模型简化为 2D 轴对称建模平面。在这个平面中,我们简单地绘制三个矩形来定义晶圆和两个沉积层,并为这三个矩形分配不同的材料属性。这样,几何形状和材料就定义好了,我们可以专注于物理场的研究。
首先,沿着光束路径穿过自由空间,从晶圆上方的激光源沿着 z 轴向下。我们有一个 40W、700nm 波长的激光器,并且光束具有标准偏差为 1.5mm 的高斯轮廓。激光器开启 75ms,然后关闭 25ms,或者激光器使用占空比为 75%,周期为 100ms 的脉冲加热。这种时间上的阶梯式加载是通过事件 接口解决的,该接口用于引入一个 离散状态 变量 ONOFF,即时间为 0 或 1。
我们不会明确地模拟激光源或通过自由空间的光束路径;我们将只对与材料相互作用的光进行建模。在顶层的边界处,折射率为  的材料会因为折射率的差异而有一些反射,如菲涅耳方程所示:
的材料会因为折射率的差异而有一些反射,如菲涅耳方程所示:
虽然这个方程适用于复值折射率,但在我们的计算中只考虑折射率的实值分量是合理的,因为折射率的虚部非常小。在界面上没有任何吸收的附加假设下(例如由于吸收材料的非常薄的涂层),透射率为  。这样就完成了我们在吸收介质中辐射束 接口设置入射强度 功能所需的信息,如下面的屏幕截图所示。
。这样就完成了我们在吸收介质中辐射束 接口设置入射强度 功能所需的信息,如下面的屏幕截图所示。
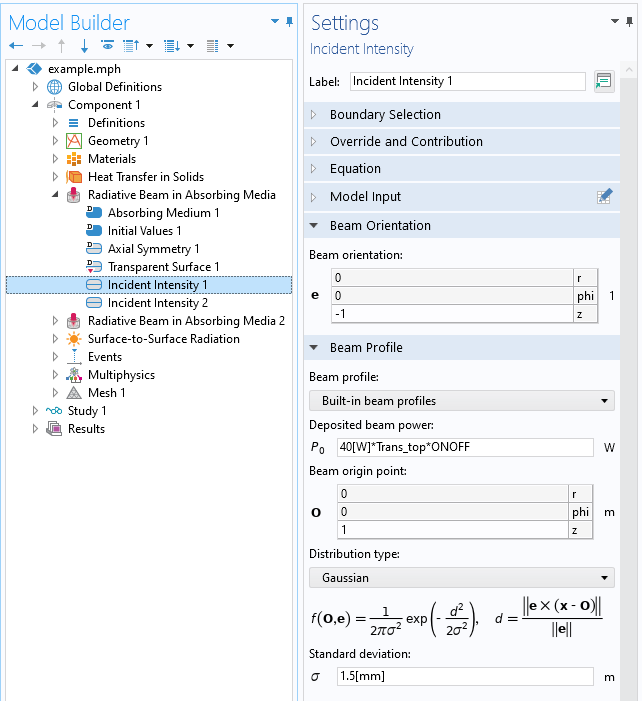
入射强度功能的设置。
当光束穿过材料的第一层时,其强度与吸收系数成比例减小,吸收系数 由下式确定:
其中, 是折射率的虚部,
是折射率的虚部, 是自由空间激光波长。吸收系数可能与温度有关,但我们将从它是一个常数开始。给定光束轮廓在顶面上的强度分布,剩下整个域的光束强度通过计算获得。
是自由空间激光波长。吸收系数可能与温度有关,但我们将从它是一个常数开始。给定光束轮廓在顶面上的强度分布,剩下整个域的光束强度通过计算获得。
在沉积材料的顶层和底层之间的介电界面,将再次存在菲涅耳方程描述的反射和透射。光束的反射分量使用已有的 吸收介质中的辐射光束 接口进行处理,只需添加第二个入射强度 功能就可以了。可以向这个界面添加任意数量的入射强度 功能;每个都将引入一个额外的变量来求解,这些变量将被命名 rbam.I1, rbam.I2, …, 依此类推。在第二个入射强度 功能中,我们可以引入基于第一个光束强度和菲涅耳反射系数的用户定义的光束轮廓。通过改变光束方向的符号,可以完全考虑光在此接口上的部分反射,如下面的屏幕截图所示。从理论上讲,在顶部边界会有一个额外的光束反射,但是这个二次反射足够小,所以我们将忽略它。
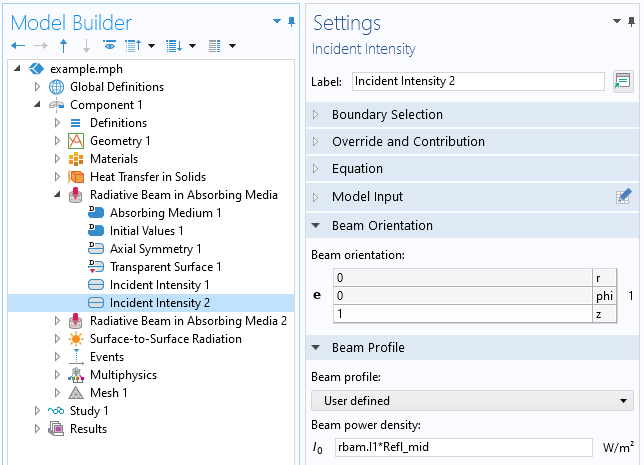
第二个 入射强度功能的屏幕截图,考虑了介电界面处的反射。
接下来,我们跟随光束穿过介电界面进入第二层半透明材料。由于跨越此边界的光强度发生了变化,因此必须添加第二个 吸收介质中的辐射束 接口,并根据菲涅耳透射率和来自第一个吸收介质中的辐射束 接口的第一束光束来定义入射强度。
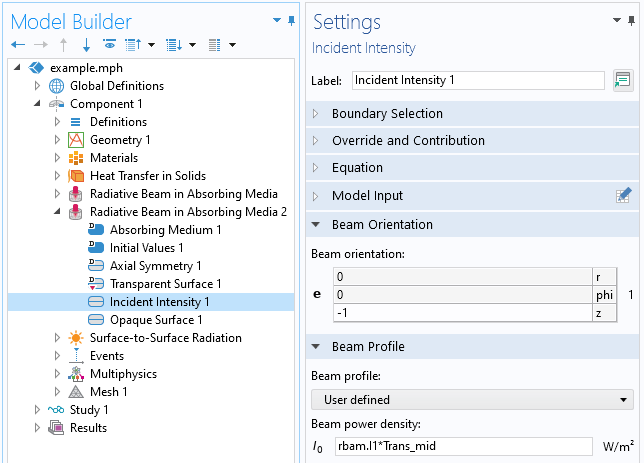
吸收介质中的辐射束接口中第二个辐射束的 入射强度特征的屏幕截图,用于底部域中的强度。
最后,让我们讨论当光线到达第二层底部并击中硅晶圆衬底时会发生什么。我们将假设硅晶片是掺杂的,因此它具有高度吸收性和非反射性。由于所有到达这个边界的光都将在足够小的距离内被吸收,因此可以说光在边界处被吸收。对于这种情况,不透明表面 边界条件将在所选边界处沉积所有能量,这就完成了激光在结构中传播时的建模。通过这些功能的组合,我们已经完全模拟了入射激光束穿过模型。现在我们可以将注意力转向热模型。
模拟温度随时间的变化
晶圆最初处于 300K 的均匀温度。所有域都有传导传热,我们假设材料之间的界面没有明显的热阻,即材料界面之间没有温差,磁通量是连续的。这种情况是软件的默认假设,但如果我们确实希望覆盖它,可以添加薄层 或热接触 功能。
在 100μm 处,层厚已经足够适用经典的傅里叶传热定律,值得一提的是,纳米级传热是 COMSOL 用户研究的一个活跃领域;例如,请参阅我们的特邀博客“动力学集体模型中的流体动力热输送”。
至于热边界条件,我们将假设晶圆位于完全绝缘的底座上,并且位于一个近真空的工艺室内。这意味着不会有传导或对流传热冷却,但会向腔室壁进行辐射传热,假设保持在 300K。接着,我们假设晶圆温度只会上升几百K,因此与入射激光相比,辐射发射将处于一个更长的波长带。这意味着,从概念上讲,我们可以使用双波段模型进行辐射传热。来自激光的入射辐射已经通过吸收介质中的辐射束 接口完全处理。较长波段的发射辐射(由于晶圆相对于工艺室壁的温度升高)可以使用单波段表面对表面辐射 接口与固体传热 接口进行建模。表面到表面辐射 接口计算所有暴露表面与周围空间之间的角系数。
值得一提的是,在这种情况下,只有在晶圆上方的小内角附近存在表面对表面辐射;其他地方对环境的角系数都是统一的。如果我们想稍微简化一下,可以不使用表面对表面辐射 接口,而是在固体传热 接口中使用表面到环境辐射 边界条件。计算时间和结果的差异可以忽略不计,因此这里我们使用更准确的方法,即使用表面对表面辐射 接口计算角系数。
我们还需要特别注意这个装置的网格划分。吸收介质中的辐射束 接口求解的是一阶偏微分方程,默认情况下使用场的线性离散化。根据吸收系数,我们知道强度会随着两层的厚度发生明显变化。我们还知道,激光束轮廓在表面上的强度变化是相当渐进的。这证明了层内具有高纵横比矩形单元的映射网格是合理的。当然,随着建模复杂性的提高,我们总是希望研究网格和求解器的相对公差细化,就像我们之前的博客文章“在 COMSOL Multiphysics® 中模拟固体瞬态加热简介“所讨论的那样。
设置完成后,我们将使用随时间变化的求解器解决这个问题,并按照求解器采取的步骤保存数据。然后,我们可以绘制出温度曲线和吸收的热量,以及一段时间内中上部点的温度,如下图所示。
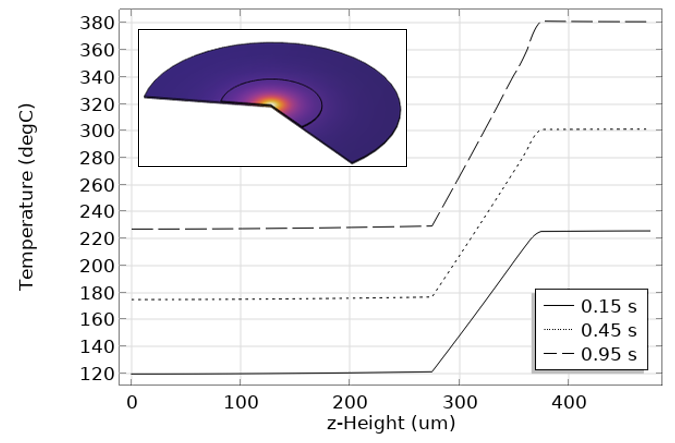
沿 z 轴的高度与温度的关系。
最后,为了说明,我们将介绍一种非线性材料,使底层的吸收系数随着温度的升高而上升。两种半透明材料的吸收系数比较如下图所示。随着非线性吸收系数的升高,材料的加热更大。由于这种材料的非线性,我们还需要细化具有非线性属性的层中的网格。
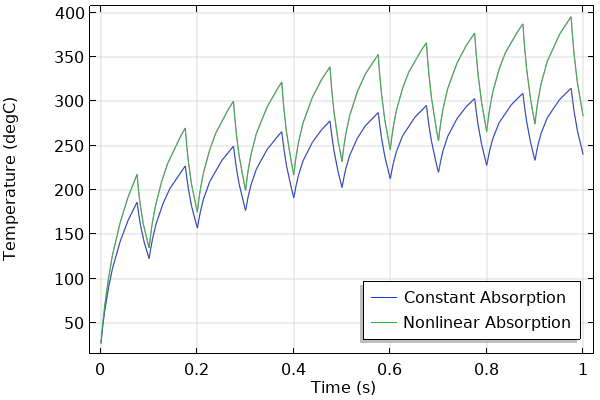
使用两种不同的材料模型比较温度随时间的变化。
结束语
我们介绍了一种解决半透明材料的加热问题的建模方法。准直辐射热源(激光)通过一组吸收介质中的辐射束 接口进行建模,该接口可以处理材料在激光波长下的半透明性质以及介电界面处的反射。脉冲热源通过事件 接口处理,较长波长的红外再辐射通过表面对表面辐射 接口处理。这种建模方法适用于半导体加工领域或准直光入射到半透明材料上的任何情况。
如果你对这些类型的模拟感兴趣,请随时单击下面的按钮下载文中讨论的示例模型:
COMSOL Multiphysics® 软件经常被用来模拟固体的瞬态加热。瞬态加热模型很容易建立和求解,但它们在求解时也不是没有困难。例如,对瞬态加热结果的插值甚至会使高级 COMSOL® 用户感到困惑。在这篇博客中,我们将探讨一个简单的瞬态加热问题的模型,并利用它来深入了解这些细微差别。
一个简单的瞬态加热问题
图1显示了本文所讨论主题的建模场景。在这个场景中,将一个空间上均匀分布的热载荷施加在一个具有均匀初始温度的圆柱体材料顶面的圆形区域内。最开始载荷很高,但在一段时间后会逐渐下降。除了施加热载荷外,还添加了一个边界条件来模拟整个顶面的热辐射,它使零件重新冷却。假设材料属性(热导率、密度和比热)和表面辐射率在预期温度范围内保持不变,并且假设没有其他作用的物理场。我们的建模目标是用它来计算圆柱体材料内随时间变化的温度分布。
在 COMSOL 案例库中的硅晶片激光加热教程模型中,有一个类似的建模场景,但请记住,本文讨论的内容适用于任何涉及瞬态加热的情况。
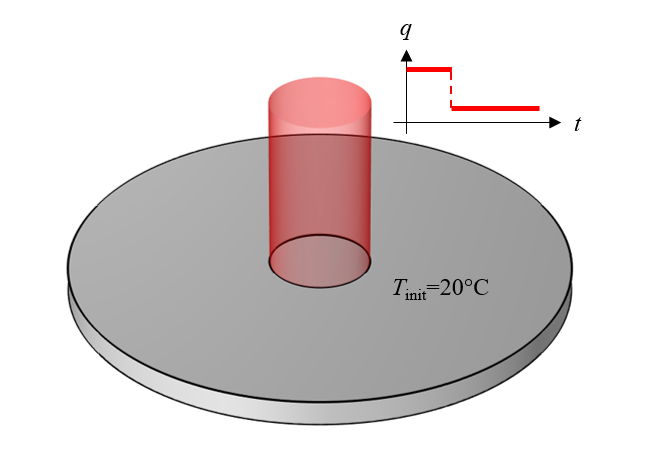
图1.顶面有一个热源的圆柱体材料几何模型。
尽管我们很想通过绘制图1中所示的精确几何结构开始建立模型,但我们可以从一个更简单的模型开始。在图1中,可以看到几何体和载荷是围绕中心线轴向对称的,所以我们可以合理地推断,解也将是轴向对称的。因此,我们可以将模型简化为二维轴对称建模平面。(点击此处,了解如何使用对称性来减小模型尺寸。)
在中间的圆形区域内,热通量是均匀的。最简单的建模方法是通过在二维域的边界上引入一个点来修改几何形状。这个点将边界划分为受热和未受热的部分。在几何形状上增加这个点,可以确保所产生的网格与热通量的变化完全一致。考虑到这些,我们可以创建一个等效于三维模型的二维轴对称计算模型(图2)。
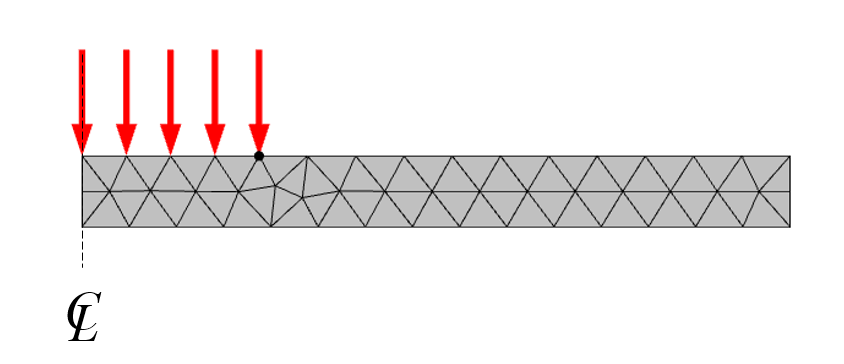
图2.相当于三维模型的二维轴对称模型。显示的是默认网格。
此外,我们还考虑了施加的热通量大小的瞬时变化的情况;在 t=0.25s 时,它的值变得较低。载荷的这种阶梯式变化应该通过使用事件 接口来解决,如 COMSOL 知识库中关于求解包含时变载荷阶跃变化的模型一文所述。简单来说,事件 接口会准确地告诉求解器载荷的变化什么时候发生,求解器将相应地调整时间步长。我们可能也想知道求解器采取的时间步长,这可以通过修改求解器的设置,按求解器的步长输出结果,然后就可以绘制零件顶部中心点的温度,如图3所示。
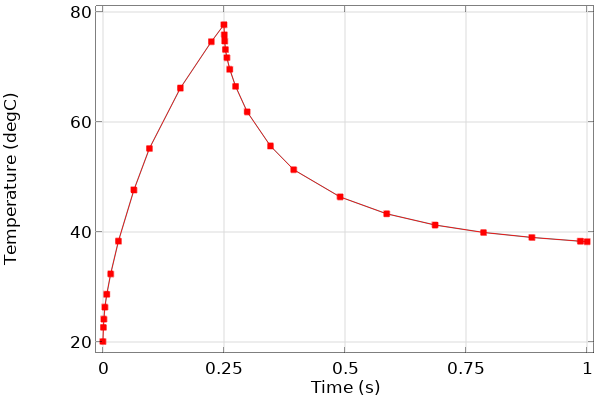
图3.某一点的温度随时间变化的曲线图,各点显示了求解器在载荷突然变化的附近采取的步长较短。
接下来,我们用不同的求解器相对容差值重新运行该模型,并在图中进行比较(图4)。这类图表明,像预期的那样,随着公差变小,解迅速向同一个值收敛。
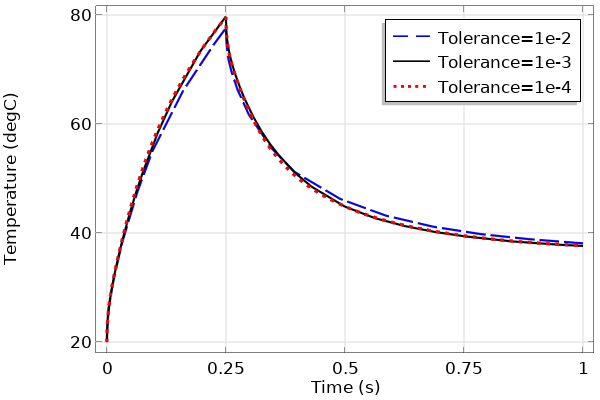
图4. 用不同的相对容差求解出的随时间变化的某一点的温度图。
另一个可以计算的量是进入该域的总能量。我们可以对通过边界的总热通量的表达式 ht.nteflux 进行积分,使用 timeint() 算子对时间进行积分,得到总能量。积分的结果在下面的表格中列出,用于增加时间步长的相对容差。(提示:你可以在 COMSOL 知识库中了解更多关于计算空间和时间积分的信息,在这篇关于如何计算质量守恒和能量平衡的博客中了解更多关于计算能量平衡的信息)。
| 求解器相对容差 | 通入域的通量的时间积分(J) |
|---|---|
| 1e-2 | 32.495 |
| 1e-3 | 32.469 |
| 1e-4 | 32.463 |
从数据中我们可以观察到,进入系统的总能量实际上几乎与时间步长容差无关。乍一看,这似乎是对我们模型的一个奇妙的验证。然而,需要指出的是,我们在这里观察到的是有限元法(FEM)的基本数学特性。简单说,就是总能量总是会很好地平衡。这并不意味着模型中没有错误,错误只是出现在不同的地方……接下来,我们就去寻找错误。
错误:很容易产生,但很难定义
我们应该在这里暂停一下,来非常谨慎地处理上文中提到的一个词,即错误 这个提示,它在建模和仿真的世界中经常被使用,但没有固定出现的场合。在本节的后面部分,我们将对各种建模案例中可能出现的不同错误进行一些详细描述。(如果你想直接跳到与模型中的错误有关的部分,请点击这里)。
输入错误
输入错误,顾名思义,是指模型输入中的错误,如材料属性输入不正确或几何形状绘制错误。最有危害的一个输入错误就是遗漏错误,例如忘记添加一个边界条件。输入错误与输入中的不确定性是不同的,例如,当不知道确切的材料属性时,就会出现不确定性。前者输入错误只能通过仔细检查来解决,而后者输入中的不确定性可以通过 COMSOL 软件的不确定性量化模块来解决。对于我们的例子,我们确定没有输入错误或不确定因素。
几何体的离散化错误
当通过有限元网格离散几何体时,特别是在对非平面边界进行网格划分时,会产生一个几何体的离散错误。这些错误随着网格细化程度的增加而减少,并且可以在不实际求解有限元模型的情况下进行计算。本文示例中的二维轴对称建模域没有弯曲的边界,不必担心这种类型的错误。
解的离散化错误
解离散错误是由于有限元基函数不能完全代表真实的解场及其在此域内的导数。它从根本上存在于有限元方法中。这种与几何离散误差有内在联系的误差总是存在的,对于任何良好的有限元问题来说,它总是随着网格的细化而减少。
时间步长误差
了解时域模型中的误差传播是相当复杂的。这篇博客,我们只要说在任何一个时间步长中引入的或已经存在的任何误差都会向前传播就足够了,但对于文中讨论的扩散类问题,它们会逐渐衰减。这种类型的误差总是存在的,而且这些误差的大小是由瞬态求解器容差和网格控制的。
插值错误
还有一种类型的错误是比较定性的,那就是插值错误。这些错误发生在对结果的意义和产生方式没有准确理解的情况下。其中最著名的是尖角处的奇异性,这种情况经常出现在结构力学以及电磁场建模中。当存在输入错误时,插值错误尤其经常出现。因此,如果你对你的结果有任何不确定的地方,一定要回去仔细检查(甚至三番五次检查!)你模型的所有输入。
上面列举的错误清单并不完整。例如,我们还可以谈一谈由于线性系统求解器的有限精度算术、非线性系统求解器和数值积分误差而产生的数值误差。然而,这些以及其他类型的误差,基本上规模都小得多的。
有了上述的这组定义,现在准备回到我们的模型了。
追踪空间和时间中的错误
到目前为止,我们已经观察了模型中某一点的解,并观察到随着我们完善瞬态求解器的相对容差,解似乎收敛得很好,所以我们应该已经理解了收紧瞬态求解器的相对容差将减少时间步长误差的想法。现在,我们来看看空间温度分布。我们将从沿中心线的温度开始,对于最宽松的容差 1e-2,看初始时间的解以及求解器采取的第一个时间步长,如下图所示。
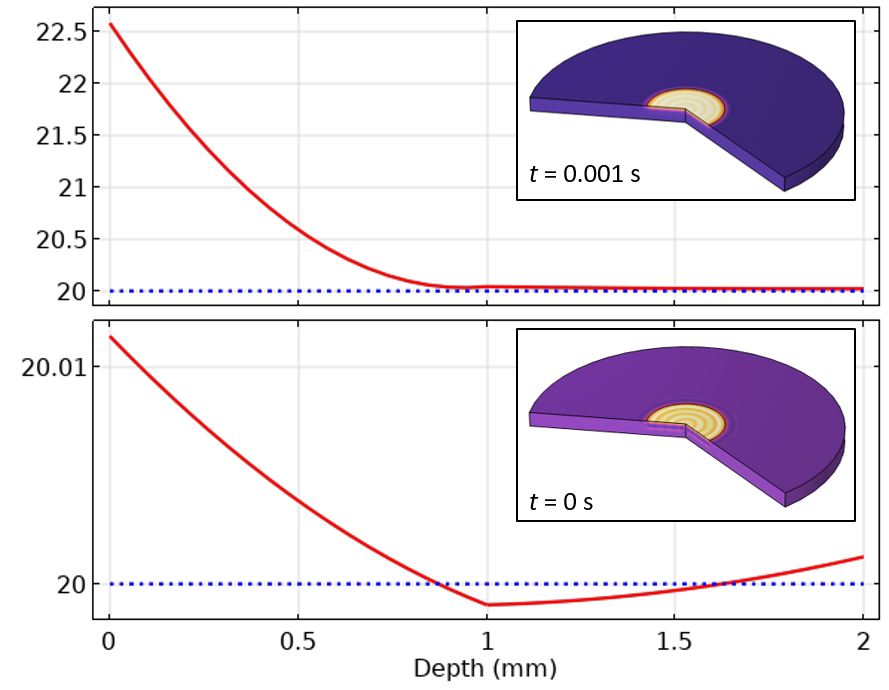
图5.初始时间和第一个时间步长的中心线温度图。
从初始值图中,我们可以看到,沿中心线的温度与规定的初始温度不一致——有些地方甚至低于初始值。这是由于 COMSOL Multiphysics 使用了所谓的一致初始化,即调整初始时间的解场,使其与初始时间的边界条件和初始值一致。一致初始化包括采取一个额外的非常小的人工时间步长,我们可以认为是在零时刻发生的。一致性初始化可以在求解器的初始时间步长设置中关闭,也可以在显式事件 和隐式事件 功能中关闭,但是这样做的时候应该谨慎。在常见的的多物理场模型中,尤其是涉及到流体流动的模型,默认情况下要让它处于可能更稳健的启用状态,所以我们在这里将讨论这种情况。
在这种情况下,考虑一致初始化的方式是,调整温度场使之与施加的载荷和边界条件相一致。由于施加的热载荷最初是不为零的,温度场的梯度与热通量成正比,最初也必须不为零。我们还需要考虑,这个场是用有限元基函数离散的。沿着中心线,这些基函数是多项式,但多项式不可能完全匹配真实的解;因此,在一致初始化步骤之后,我们最终得到的是一个会略微超过或低于预期结果的解。从第一个时间步长的解中,我们还可以看到,零件远端的温度已经在上升,这是意料之外的。虽然这些与预期的变化幅度非常小,但我们还是希望将它们降到最低。
在通过修改模型来减少这些解的离散化误差之前,让我们应用一点物理上的直觉来解决这个问题。在模拟时间开始时,沿中心线的温度分布将与涉及模拟通过一维板块的传热建模方案相当类似。对于这种类型的建模方案,已经存在一个分析解,这在许多关于传热分析的书籍中经常会谈到(实际上,这个例子被用作我桌上的一本教科书 Fundamentals of Heat and Mass Transfer的封面插图)。
为了简洁起见,我们将跳过分析解法直接陈述结果。当对表面零件施加热量时,表面的温度将开始上升,最终内部区域也会变暖。请注意,离边界较远的点需要更多的时间来加热。板块内的温度是不会均匀变化的。在内部更远的点,与靠近表面的点相比,需要更长的时间才能使温度开始变化。值得注意的是,由于传热方程的扩散性质,空间温度变化将随着时间的推移而趋于平稳。有了这种认识,让我们再回到我们的模型,看看如何改进它。
简单来说,为了使这个解的离散化误差最小化,我们需要在场变化剧烈的位置划分更精细的网格。根据我们的经验(或者分析解,如果我们想查的话),我们知道,在非常接近表面和边界的法线方向上,场的变化非常大,但在内部则变得更加平滑。这正是需要边界层网格划分的情况,如图6所示,它在边界的法线上创建薄的单元。
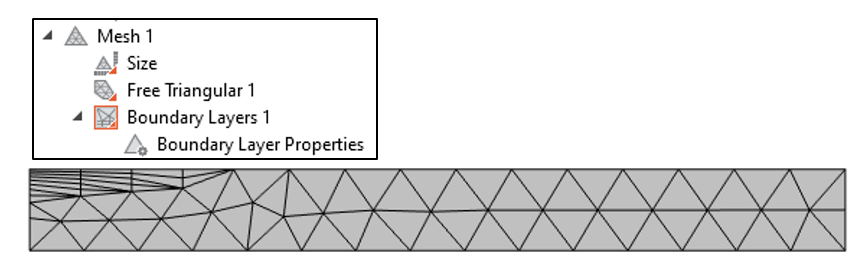
图6.通过沿着晶圆顶部的一个边界添加一个边界层来修改网格划分序列。
现在,我们可以重新运行模拟,并绘制出初始时间和下一个时间步长的解。
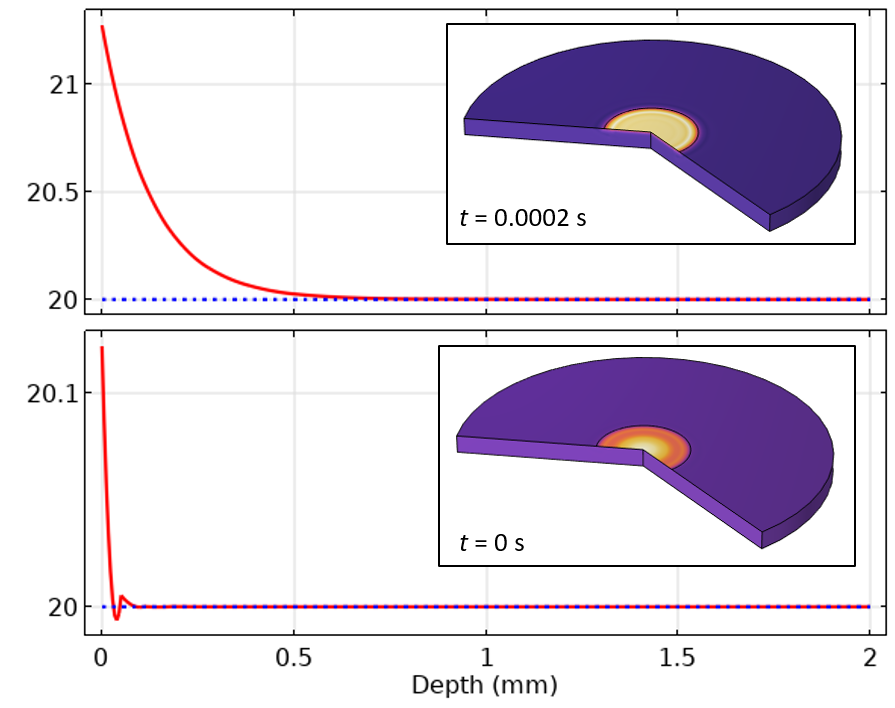
图7.使用边界层网格时,初始和第一个时间步长的中心线温度图。
在图7中,我们可以观察到,在初始值时,温度的下调在空间上更为局部。事实证明,使用更精细的网格也会导致随时间变化的求解器采取更小的时间步长。因此,通过这种细化的网格,我们减少了空间离散和时间步长误差。
我们还可以看一下沿建模域顶部边界的结果,代表暴露表面的温度分布。图8中显示的是使用 1e-2 的容差绘制的初始时间和第一个时间步长。在这些图中,我们可以观察到空间中相当剧烈的震荡场。这是空间离散化的一个表现。请记住,热载荷沿着径向轴经历了大小的阶跃变化,我们在这里观察到的有点类似于吉布斯现象。
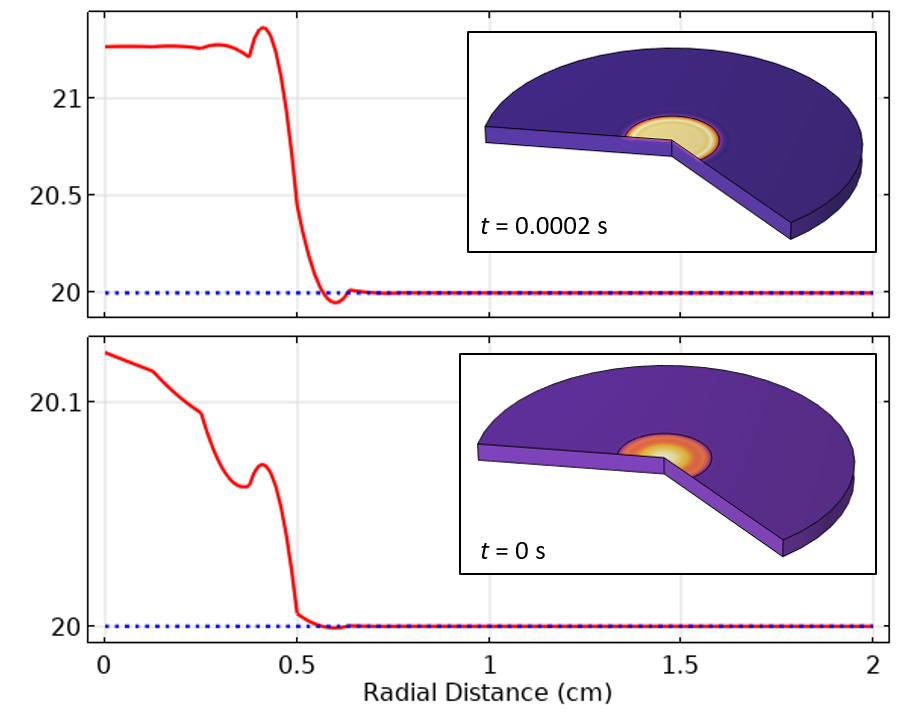
图8.使用边界层网格绘制的在初始值和第一个时间步长中沿顶面的温度图。
解与之前类似,但现在我们必须在过渡的位置细化网格。对于这个问题,可以对划线点应用更加精细的大小设置,从而得到如下所示的网格。
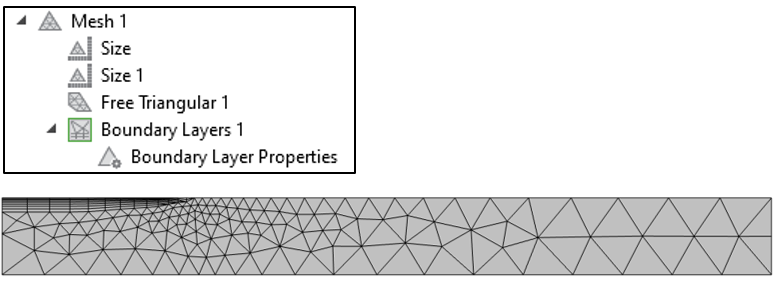
图9.网格设置和网格的图示,在划定热载荷分布的点上应用较小的网格大小。
从图10的温度结果中,我们可以看到,现在解中的振荡已经减少了,在空间和时间上的传播也没有那么多。即使求解器的相对容差为 1e-2,求解的结果也已经有了很大的改善。
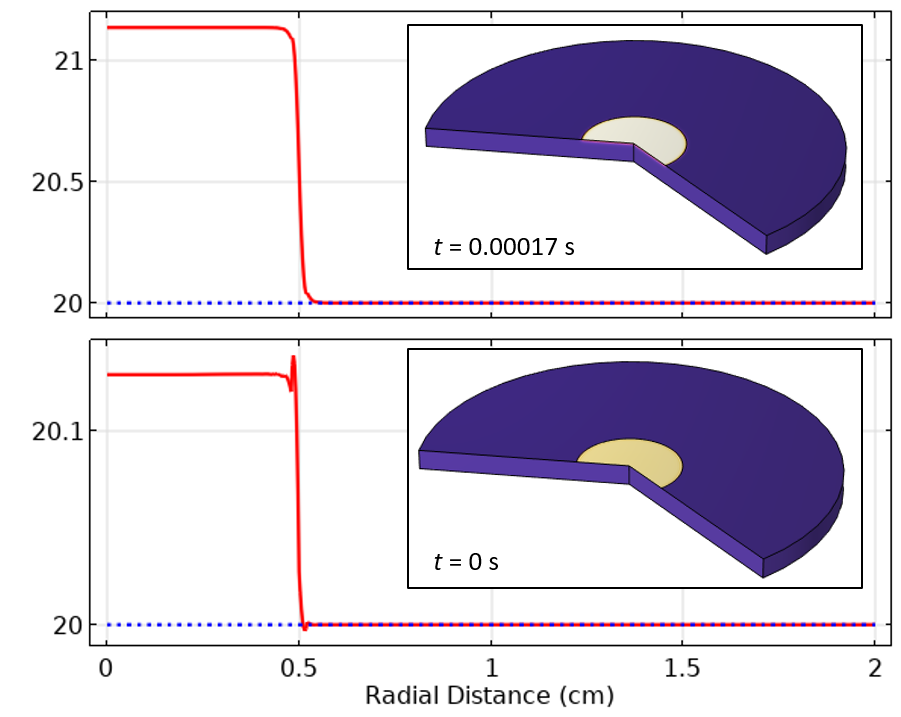
图10.在细化网格后,使用0.01的相对容差,在初始值和第一个时间步沿顶面的温度要准确得多。
我们可以使用更多的网格和求解器容差细化来继续这个练习。但通过我们目前所做的细化,已经开始看到误差迅速减少–由于瞬态传热方程的扩散性质,即使是仍然存在的误差也会在空间和时间上被平滑掉。实际上,我们应该花同样多的精力来研究模型输入中的不确定性的影响。
还有什么可以发挥作用?
在这个例子中,施加在边界上的热载荷并没有及时移动,所以划分边界的方法是合理的。如果热载荷分布要移动,那么受热面的整个网格就需要更加精细。(你可以在这篇博客中了解在 COMSOL® 中对移动载荷和约束进行建模的 3 种方法)。
在这篇博客的前面部分,我们假设材料属性随温度的变化而保持不变,并且不依赖于任何其他物理场。这是一个重大的简化,因为所有的材料属性都会随温度变化。材料甚至可以经历相变,如融化。模拟相变可以用几种不同的方法,包括表观热容法,它是使用高度非线性的比热来说明相变的潜热。我们也可以很容易地预见到这是一个多物理场问题,如涉及热固化的方程式,甚至是材料非线性电磁加热问题。在这种情况下,我们不仅需要监测温度场的收敛性,还需要监测所有其他正在求解的场变量,甚至可能是它们的时间和空间导数。这些情况可能都需要在建模域的所有地方采用非常精细的网格,所以从本例这种简单情况中得到的经验可能并不适用。然而,即使在对更复杂的模型进行网格划分和求解时,记住最简单的情况总是好的(即使它只是作为一个概念性的起点)。
此外,我们应该强调的是,这篇文章只是关于固体材料的时变传热。如果有一个移动的流体,控制方程将发生重大变化;流体流动模型的网格划分是一个单独的、相对更复杂的话题。对于波动型问题,网格的选择和求解器的设置就变得相当简单了。
结束语
在这篇博客中,我们复习了一个典型的传热建模问题。我们注意到,在空间和时间上,在载荷突然变化的情况下,解会出现某些错误。读者现在应该对这些错误类型有所了解,并知道它们是有限元方法的固有结果,就像所有的数值方法一样,只是对现实的一种近似。尽管这些误差看起来很大,但由于瞬态传热方程的扩散性,它们的大小在空间和时间上都会衰减。我们已经表明,网格细化将减少空间离散误差,同时隐含着减少时间步长误差的效果。最后,我们讨论了如何通过求解器相对容差细化来进一步减少时间步长误差。
还值得做一个更简短的总结:如果你主要对一个相对长的时间后的解感兴趣,使用相当粗的网格和默认的求解器相对容差是完全可以接受的。另一方面,如果你对短时和小范围的温度变化感兴趣,那么必须研究求解器相对容差和网格细化。
理解了这些,我们就可以避免犯解释错误。这将使我们能够自信和轻松地从简单的模型中建立更复杂的模型。
下一步
点击下面的按钮,你将进入 COMSOL 案例库,可以尝试自己模拟这篇博客中提到的示例模型。
COMSOL Multiphysics® 6.1 版本中增加了一个新的接口,可以计算在轨卫星的辐射热载荷。这个轨道热载荷 接口是传热模块的一部分,用于定义卫星的轨道和方向、轨道机动和变化的行星属性。我们可以使用这个接口计算太阳、反照率和地球红外热载荷,然后计算卫星温度随时间的变化。接下来,让我们了解更多详细内容!
背景知识
卫星热设计是一个具有挑战性的问题。一颗卫星是由许多对温度敏感的部件组成的。传感器、照相机、收音机、电子器件、电池、姿态控制系统和太阳能电池板都需要保持在一定的温度范围内,甚至卫星结构本身也必须保持在一定的温度范围内,以防止过度的热变形。许多组件都会散发热量,卫星也会经受来自环境的多种不同的红外(IR)热载荷。设计一颗卫星需要了解如何最好地将所有这些热量辐射出去,并使卫星保持在理想的工作条件下。
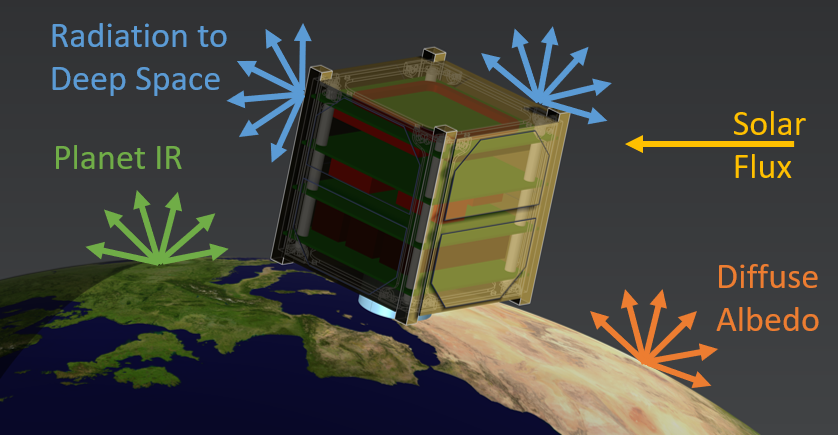
各种电子元件产生的热量通常很容易定义,但环境热载荷可能出奇地复杂。首先,在面向太阳的任意表面上,有直接入射的准直太阳光通量。其次,对于近地轨道上的卫星,入射到地球日光侧的太阳光通量会被漫反射到卫星朝向地球一侧的表面。这些反射的大小取决于地球的局部表面特性以及不断变化的大气条件。总的来说,漫反射太阳光通量大约是直接太阳光通量的三分之一,被称为反照率通量。当卫星进入日食时,这些直接的太阳光通量和反照率载荷下降为零,但有一个第三环境热源始终存在。地球是温暖的,相当于一个漫射器,其红外辐射的大小是纬度和经度的函数。
知道这些随时间变化的环境通量,以及它们在卫星表面的分布,是计算卫星温度所需要的输入,这涉及到求解固体部分的热传导和所有暴露表面的辐射。通常将这些环境通量分为两个波段:太阳波段和环境波段。这样做的原因是,太阳温度在 5780K 左右,主要发出短波长的辐射,而卫星和地球温度都在 300K 左右,主要发出长波长的红外辐射。这种划分是很重要的,因为为了热管理,卫星外部涂层的表面吸收性能往往是专门定制的,是波长的函数。例如,为了使卫星的工作温度尽可能低,一种方法是使用在太阳波段具有低吸收率(发射率)但在环境波段具有高发射率的表面涂层。
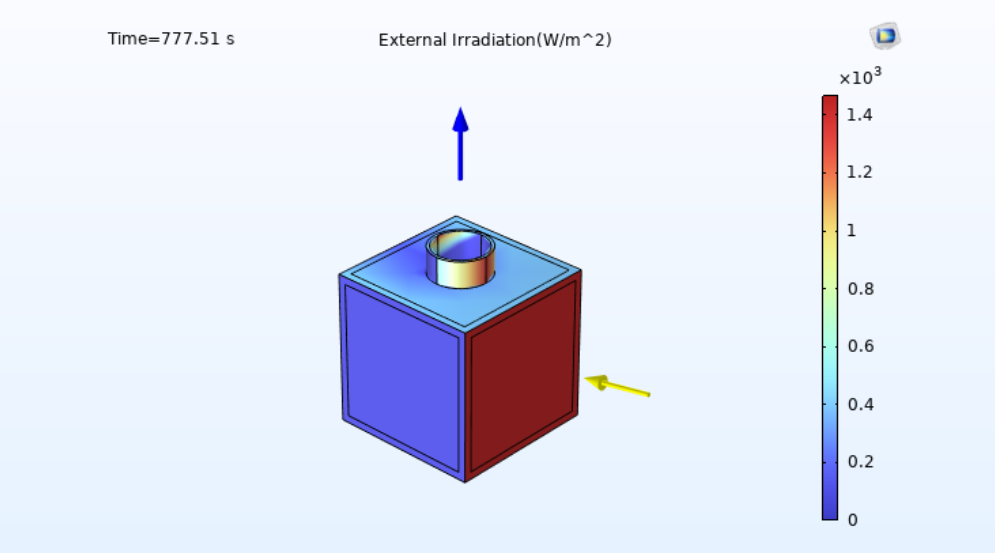
卫星在轨道上经历的辐射传热取决于它相对于地球和太阳的位置和方向。地球图片来源:可视地球和美国国家航空航天局。
一颗质量恒定的卫星围绕着一颗质量大得多的球形行星运行时,会沿着一条椭圆的路径,这条路径可以用开普勒轨道根数来描述,它描述了一个周期性的轨道。轨道根数被用来计算(通过中心方程)卫星在赤道坐标系(ECS)中的坐标。
在了解卫星随时间变化的位置的同时,也有必要了解它的方向性。这首先要通过一组卫星轴来定义卫星坐标系。根据任务参数,这些卫星轴是朝向特定方向的,如朝向地球、太阳、前进方向,或天球上的一个固定点。有时候也会想要改变这些轴的定义和它们的方向,例如为了使仪器朝向一个地理位置。卫星也可能围绕一个或多个轴缓慢旋转或相对快速地翻滚。方向的变化会影响热载荷以及卫星的阴影。例如,卫星上的一个突出物,如太阳能电池板或仪器,将对它后面的表面产生阴影。如果有旋转的太阳能电池板或其他铰接元件,这也将改变阴影和热载荷。另一方面,如果卫星在快速翻滚,这意味着环境热载荷是均匀的。
一旦获取了所有的任务参数,就有可能计算出所有的环境热载荷,然后就可以很直接地计算出卫星在一段时间内的温度曲线。现在,让我们看一下轨道热载荷 的用户界面,探索在设置卫星热分析时它是如何帮助输入数据的。
轨道热载荷用户界面概述
轨道热载荷 接口的工作方式与 COMSOL Multiphysics 产品库中的其他接口类似,并使用一致的工作流程。您可以从以下两个方面入手:
- 使用 LiveLink
 for CAD 产品之一,将 COMSOL® 与您的 CAD 平台双向连接。
for CAD 产品之一,将 COMSOL® 与您的 CAD 平台双向连接。
从这里开始,您将使用与其他工作流程类似的 CAD 简化和清理以及网格划分、求解和结果评价功能。因此,如果你已经是 COMSOL 用户,你将很快掌握这个新接口。
作为典型工作流程的一部分,轨道热载荷 接口分三个步骤使用,对应于三种不同的研究类型。首先,定义轨道根数、卫星轴和方向,并使用轨道计算 研究步骤解决一个或几个轨道周期的问题。这让我们在通过轨道热载荷 研究步骤计算所有环境来源的辐照度之前,快速验证任务参数。一旦这些辐照度被求解并存储,它们就被用来计算结构的温度和所有暴露表面之间随着时间推移的表面对表面辐射,使用轨道温度 研究步骤。对于每个轨道的环境热载荷相同的情况,可以只计算一个轨道的热载荷,并在热分析中及时重复计算。
轨道热载荷 接口可以单独用于计算环境热载荷,但更多的是与固体传热 和事件 接口一起使用。固体传热接口计算卫星固体结构内的温度分布,而事件 接口则跟踪日食和调整方向,以及任何其他状态的瞬时变化,如仪器的开启和关闭。
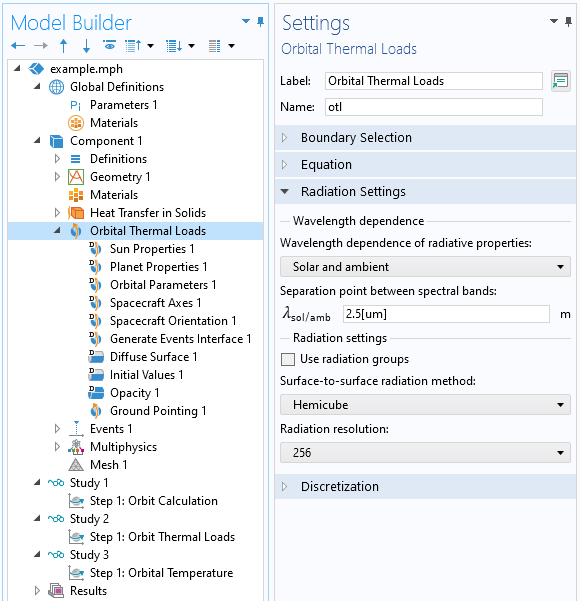
截图显示了轨道热载荷接口,以及三种相关的研究类型。
该接口的设置如上图所示,其与表面对表面辐射 接口的设置类似,但默认使用太阳光和环境 双波段模型。辐射总是存在于所有暴露的表面之间,包括卫星的外部和内部。
现在,让我们看一下接口内的默认功能。
首先,太阳属性 功能定义了入射的太阳光在 ECS 中的方向,以及太阳光通量。太阳方向 有四个预定义的选项。这些选项是根据地球的二分时刻和至点来定义的,这将控制太阳光矢量和太阳光通量。你也可以输入你自己的太阳光矢量,使它成为一个随时间变化的表达式。如果使用多波段光谱模型,太阳可以被看作是一个黑体发射器,在每个波段内有一个确定的通量,或者通过通量的分布作为波长的函数。通常把太阳当作黑体发射体就足够了,这是默认行为。
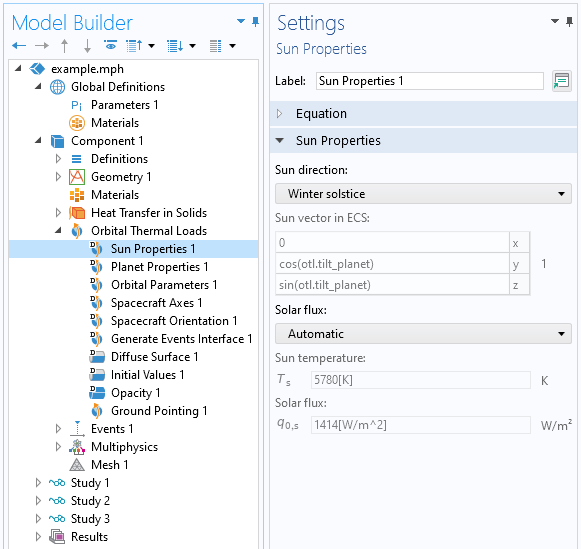
太阳属性特征指定了太阳光矢量的方向和太阳光通量。
接下来,行星属性 功能指定了计算轨道和日食所需的几个参数。开始时间的行星经度 使卫星下的行星定向,当以地面上的位置指定轨道机动时,或者当行星属性是纬度和经度的函数时,这很重要。辐射属性 部分可以用来启用反照率和行星红外载荷,反照率和行星红外通量 都可以成为经纬度的函数。这些数据可以从电子表格或图像数据中读入。行星是通过离散化处理的,即行星的可见部分被细分为一组具有相等角系数的斑块。当反照率或行星的红外特性变化很大时,以及对于低空轨道,可能需要更精细的离散化。
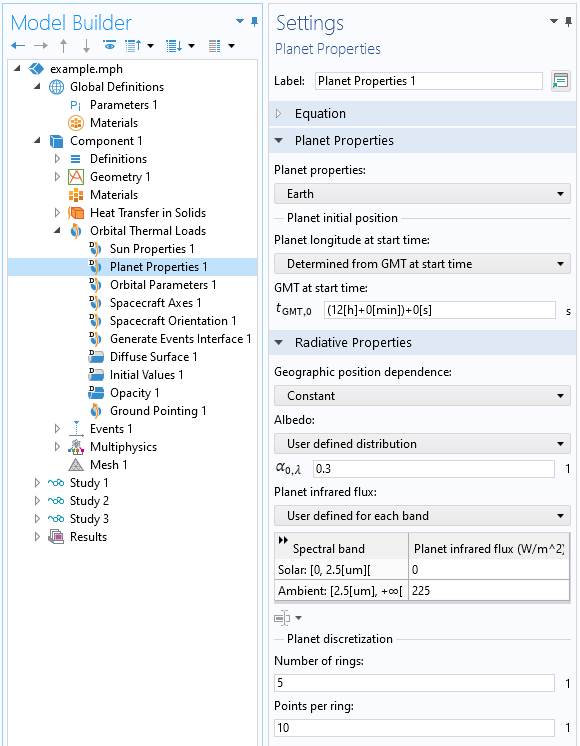
行星属性功能在启动时将行星定位在卫星下方,并描述行星的辐射属性。
下一个默认功能,轨道参数,提出了在六个开普勒轨道要素方面定义轨道的设置:半长轴、离心率、倾角、升交点经度、近心点角和起始时间的真近点角。圆形、赤道椭圆形 和赤道圆形 轨道也可以用一组减少的参数来定义。
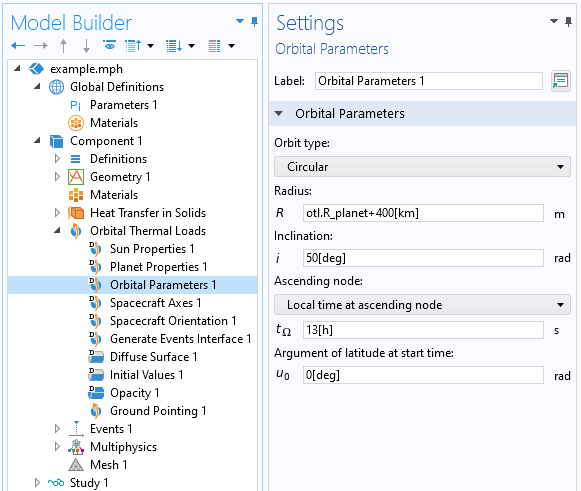
轨道参数功能是用来输入轨道单元的。
航天器轴 特征定义了卫星坐标系的轴方向。这些轴可以在 CAD 坐标中指定,也可以选择卫星的一个面,在这种情况下,使用面的法线方向。当把仪器指向一个特定的方向时,这很有用。选择的次要指向方向不需要与主要方向垂直;采用次要矢量对主要方向的法线平面的投影。第三个轴完成了一个右手坐标系。可以定义不同的坐标系,与航天器方向 特征一起使用。
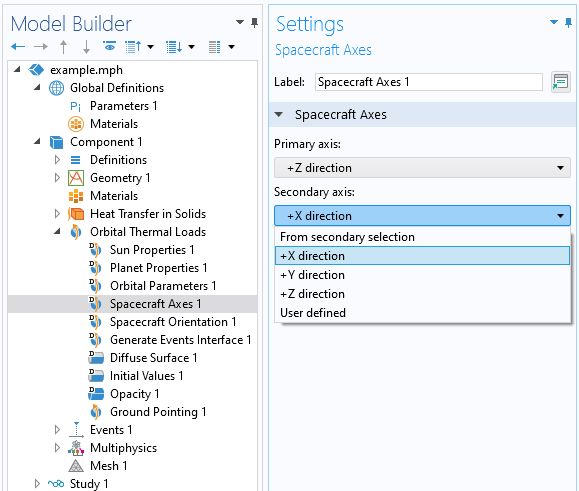
航天器轴 特征定义了主要和次要的指向性方向。
航天器方向 特征定义了航天器的主轴和次轴方向,以及围绕主轴、次轴和第三个方向的旋转(如果有的话)。方向可以是天顶/天底、太阳/与太阳相反、速度/与速度方向相反、轨道法向/与轨道法向相反、天体点或地面站中的任何一个。卫星将精确地朝向主轴方向并旋转,以使航天器的第二指向方向指向第二个方位方向。
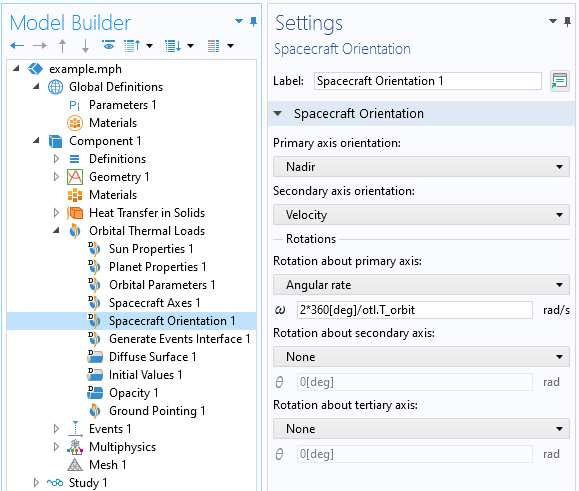
航天器方向特征与 航天器轴特征一起,定义了卫星在一段时间内的定位方式。
如果只有一个航天器轴 和航天器方向 特征,那么这些特征将在整个分析中使用。可以有这些特征的多个实例,并可以在它们之间进行切换,以引入各种轨道机动。为了在各种定义的组合之间进行切换,使用了生成事件接口 特征,它允许轨道机动的序列,例如在卫星处于射程内时指向一个特定的地理位置。
事件接口 还有另一个目的,在所有用例中都是持续的:追踪日食。卫星进入和离开日食的时间(如果它们发生的话)被用来向求解器表明热载荷正在发生变化。
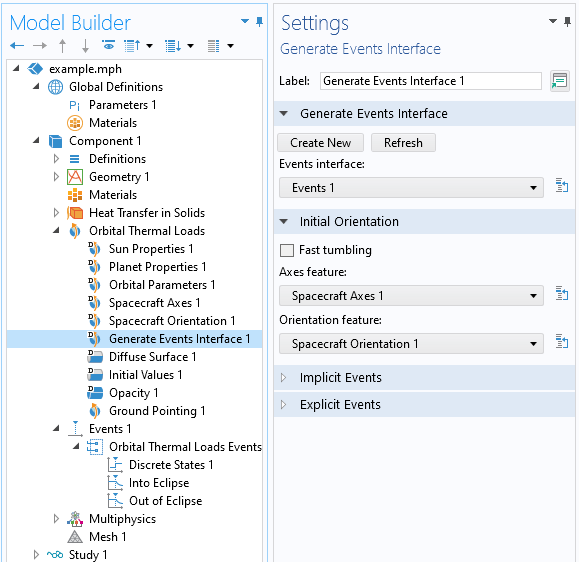
生成事件接口特征将填充事件接口中的 轨道热载荷事件节点。始终考虑日食。
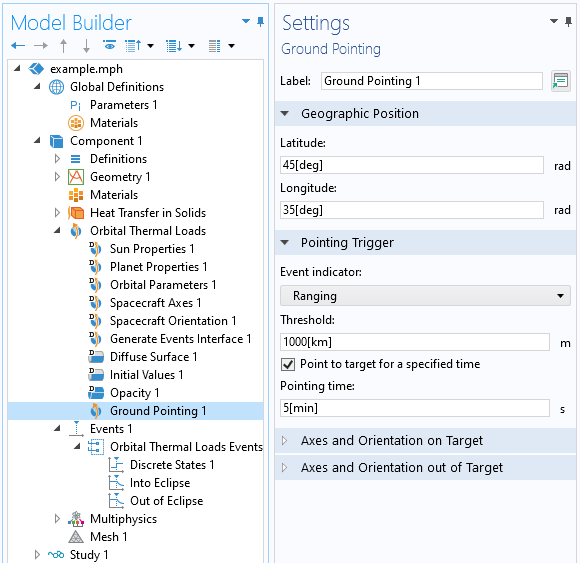
地面指向特征可用于设置额外的事件,根据不同的条件将卫星指向某个地理位置。
接口中的其余特征,即漫反射表面、初始值 和不透明度 特征,都与各种建模表面的发射和反射的建模有关。
从热建模的角度来看,一旦环境热载荷被计算出来,工作流程与任何其他涉及热传导和辐射的模型是相同的。轨道热载荷 接口解决了辐射传热问题,并与固体传热 接口相耦合,后者考虑了卫星固体结构内的热传导,也允许你定义体积或表面内的热载荷,这些热载荷可以是恒定的或时间变化的。除此之外,你还拥有传热模块的完整功能集,包括:
- 薄壁部件的传导传热
- 交界面处的接触热阻
- 相变材料
- 流体中的对流传热
- 集总热连接和组件
一旦完全定义了问题并解决了轨道热载荷以及温度问题,将得到一组默认的图表,也可以创建任何数量的其他数据的可视化图表。让我们看一下其中的一些…
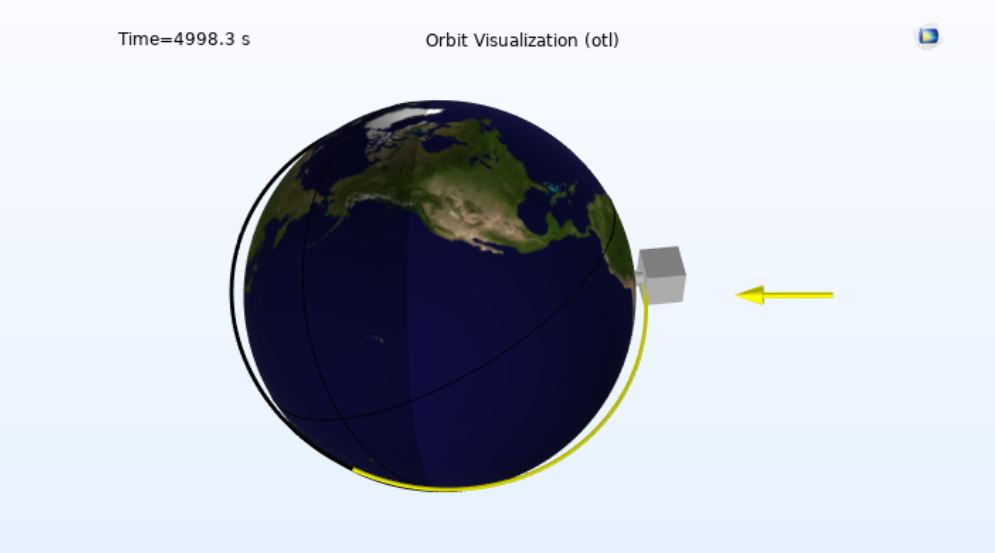 显示围绕地球的轨道、太阳光矢量和卫星方向的图。地球图片来源:Visible Earth 和 NASA。
显示围绕地球的轨道、太阳光矢量和卫星方向的图。地球图片来源:Visible Earth 和 NASA。
 所有来自环境源的总辐照量,以及太阳矢量随时间变化和天底方向的图。
所有来自环境源的总辐照量,以及太阳矢量随时间变化和天底方向的图。
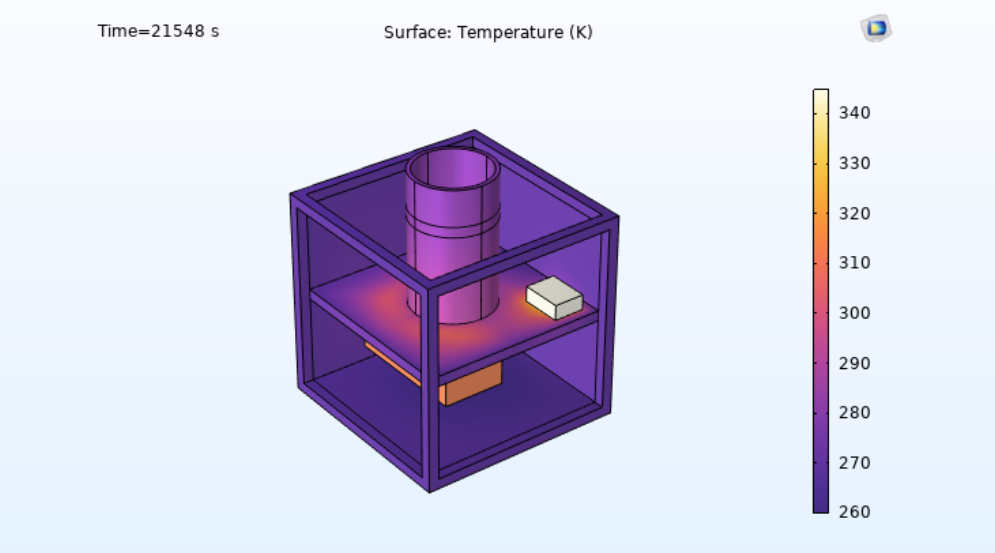
显示一个小卫星内几个部件的温度的图。一些外部表面被隐藏起来。
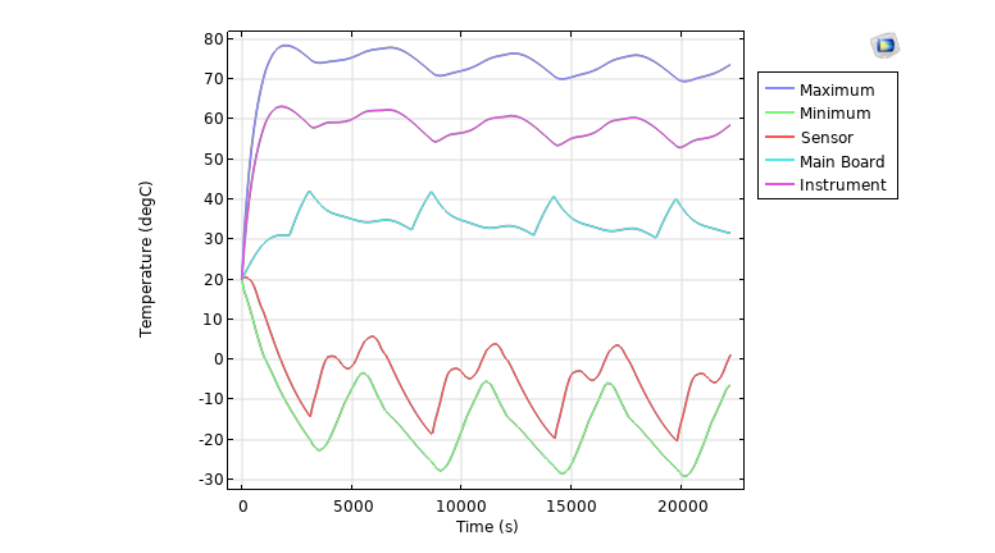
在几个轨道上收敛到周期性状态的几个组件的温度图。
结束语
有了新的轨道热载荷 接口,现在就可以快速建立一个在轨卫星的热模型,用于预测运行性能。该接口对于从事卫星规划和设计的工程师来说是一个很好的工具。对于那些想马上开始使用传热模块的用户,请看下面的例子:
LiveLink 是 COMSOL AB 的商标。Parasolid 是 Siemens Product Lifecycle Management Software Inc. 或其在美国和其他国家的子公司的商标或注册商标。ACIS 是 Spatial Corporation 的注册商标。
在过去的几十年里,无数的食品和饮料出现在杂货店的货架上,然而在几年后它们就停产了。你甚至可以想到您最喜欢的零食或饮料似乎突然消失了。这种食物消失的行为可以用一个非常简单的答案来解释:如果一种产品不畅销,那么它被补货的机会就比较少。
在这篇博客中,我们将探讨失败的产品和多物理场仿真的使用如何激发食品行业内创新器具、产品和工艺流程的开发。
从失败中孕育成功的食品
停产或失败的产品不一定是坏事,因为从它们的衰落中可以学到很多东西,它们还可以激发出生产畅销产品的灵感。美国早餐麦片品牌 Wheaties® 公司的起源就是这样一个例子。在 20 世纪 20 年代初,Washburn Crosby® 公司(即今天的通用磨坊公司)的一名员工正在准备一种麦麸混合物时候,不小心将一部分半液体混合物掉到了热炉子上,很快混合物就变脆片状了(参考文献1)。从此,我们今天所熟知的麦片诞生了,但故事并没有就此结束。这种片状谷物并非一夜成名,自 1924 年首次亮相以来,多年来它一直是一个失败的产品。当在美国各地的广播电台播放有关麦片的广告词后,它最终成为了家喻户晓的名字。麦片的名气的进一步扩大要归功于它与体育界的密切联系。(超过 850 名运动员曾在 Wheatiesbox® 的封面上出现过)。
食品工业中另一个类似的从失败到成功的故事是微波炉发明背后的故事。和麦片一样,微波炉也是一个偶然的发现。物理学家兼发明家 Percy Spencer 在实验室测试磁控管时,注意到他口袋里的花生糖开始融化。为了进一步研究磁控管的烹饪能力,Spencer 将爆米花粒和鸡蛋暴露在里面。他发现爆米花爆裂了,鸡蛋爆炸了。Spencer 从这些观察结果中得出结论:磁控管产生的低密度微波能量不仅加热了食物,而且加热速度很快。1945 年,Spencer 和他的雇主 Raytheon 公司根据这一发现,为一项发明申请了专利,他们称之为“Radarange®”。

一艘轮船上的Radarange。图片来源:Acroterion — 自己的作品。根据CC BY-SA 3.0 授权,通过 Wikimedia Commons 共享。
Radarange 的早期版本由于其尺寸、价格和重量而未能成功量产(它比冰箱还大,以今天的货币计算价值超过 50,000 美元,重量可能超过 750 磅!)。随着对其设计的重大修改,它变得更加适合家庭使用,这项发明的销售额急剧上升,后来被称为微波炉。今天,超过 90% 的美国家庭都拥有一台微波炉,其中包含基于 Percy Spencer 发现的技术。
这些故事告诉我们,从失败中学习,从失败中建立并保持灵感是很重要的。仿真实现这一点的一种方法,它可以轻松优化旧的设计和测试新设计。接下来,我们来看看在食品工业中使用仿真可以实现什么。
食品工业中的仿真
工程师和研究人员使用仿真能够获得有关他们正在研究的产品、过程或设备性能的宝贵见解。通过仿真,用户可以测试那些具有挑战性甚至不可能进行的物理测试的参数。他们还可以使用仿真来提出新设计、优化设备并加速原型制作过程。可以研究产品质量对不同参数的敏感性,以实现产品的可重复性。对于在食品行业工作的工程师来说,通过仿真深入了解产品、过程或设备尤为重要,因为食品生产需要密切关注细节。食品特性的微小变化都能被消费者的嗅觉和味觉检测出来。
借助 COMSOL Multiphysics 软件,工程师可以在一个直观的软件环境中分析影响食品的各种物理现象(包括传热、流体流动、化学反应、固体力学和电磁学)。这种多功能性使 COMSOL Multiphysics® 成为一个可以使食品生产链的所有阶段受益的平台,包括生产、加工、分销、零售和餐厅。在下一节中,我们将探讨五个具体的示例,来重点说明在食品行业中使用仿真的好处。
教程模型示例
COMSOL Multiphysics 及其附加模块包含对食品和饮料行业中常用的各种流程、工业设备和家用电器进行建模的功能。让我们回顾这些众多示例中的几个…..
过程
冷冻干燥
冷冻干燥是一种干燥热敏性材料的工艺,被广泛应用于各个行业,从用于保存抗生素和疫苗的制药行业到用于修复浸水书籍、艺术品、照片等的文件修复行业等。然而,这个过程因它在食品工业中的使用而最广为人知,因为它能够保存食品长达 30 年。当一种物质,如食物,被冷冻干燥时,它首先被冷冻,然后通过升华 的过程直接变成气态。在之前的博客文章中,我们讨论了如何使用相图来显示固体,以及如何跳过液相直接进入气态阶段。

冻干咖啡的特写图。图片来源:Pleple2000 — 自己的作品。根据CC BY-SA 3.0授权,通过Wikimedia Commons 共享。
为了深入了解冷冻干燥工艺,可以使用传热仿真对其进行建模和分析。例如,使用 COMSOL Multiphysics 和它附加的传热模块中的特性和功能,可以模拟冰在真空室条件下通过小瓶的多孔介质升华,这是许多冷冻干燥设置的常见测试用例。你可以查看冷冻干燥教程模型,获取执行此操作的分步说明。
冷冻干燥模型的图像。
啤酒酿造中的发酵
食品和饮料行业使用的另一种工艺是发酵工艺,通常用于生产啤酒。在啤酒酿造过程中,发酵用于将麦芽汁中的糖转化为乙醇和二氧化碳气体,从而使啤酒具有酒精含量和碳化作用。当冷却的麦芽汁(<20°C)和酵母被添加到发酵容器中时,这个过程就开始了,发酵容器通常是处于厌氧条件下的封闭罐。这个操作会导致麦芽汁发酵。发酵完成后,我们就得到了啤酒这一产品。(提示:在我们的博客文章“通过模拟啤酒酿造中的发酵建提升啤酒的品质”中了解有关发酵工艺的更多信息。

一组发酵容器。图片来源:Antoine Taveneaux – 自己的作品。根据CC BY-SA 3.0授权,通过Wikimedia Commons共享。
发酵过程的结果可能是不可预测的,因为它依赖许多不同的因素,包括初始糖含量、酵母类型和选择的过程温度。通过啤酒酿造发酵教程模型,你可以进一步分析此过程,并通过化学建模更好地预测其结果。该教程分两步对发酵过程进行建模。第一步,使用反应工程 接口在完美混合的罐中对发酵过程进行建模。第二步,模型被扩展为一个考虑了传质、传热和自然对流的球形罐几何结构。这两种模型都可以评估可能影响发酵过程中产生的最终酒精含量的各种参数。点击此处,查看此教程的 MPH 文件和 PDF 说明。
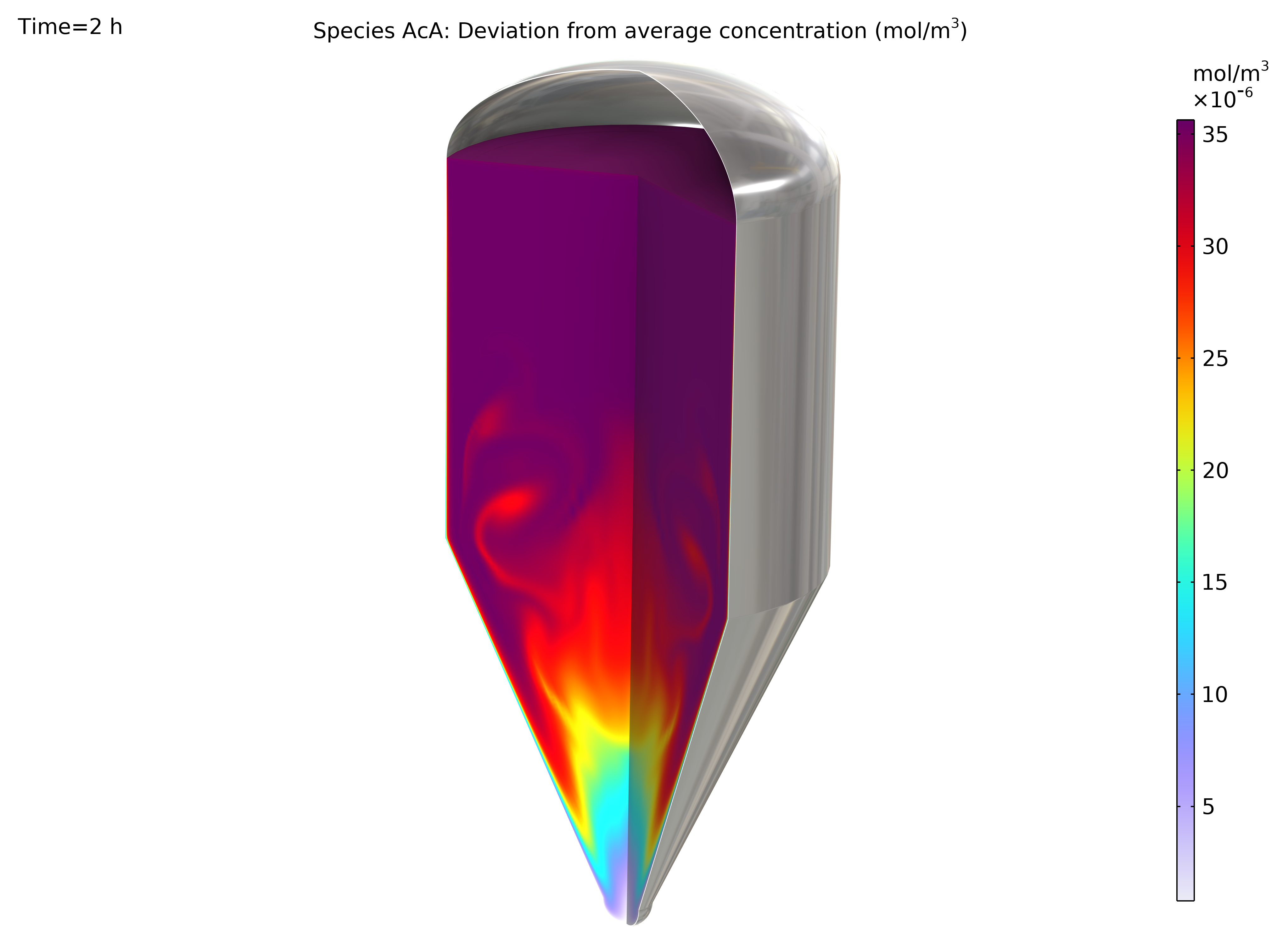
啤酒发酵反应器中平均浓度的局部偏差。该模型可以了解产品对发酵反应器中局部温度和流量的敏感性。
工业设备
搅拌器
在食品工业中,工业搅拌器用于将两种或多种独立的成分结合起来生产各种食品和饮料,包括但不限于:
- 糖果
- 口香糖
- 咖啡
- 敷料
- 果汁
- 酱汁
- 汤
- 糖浆
这些机器在确定食品的特性方面发挥着关键作用,例如味道和质地。如前所述,消费者可以很容易地检测到它们的变化。因此,搅拌器在不同批次之间高效、一致地运行非常重要。(在大多数情况下,它们不仅是搅拌器,也是反应器。)仿真可以设计搅拌器,他们可以及时生产出高质量、均匀且安全消费的产品。

工业搅拌器。图片来源:Erikoinentunnus — 自己的作品。根据CC BY-SA 3.0授权,通过Wikimedia Commons共享。
模块化搅拌器模型教程提供了有关如何对三种混合过程场景进行建模的详细说明:
- 带有 Rushton 涡轮的平底搅拌器中的层流混合问题
- 使用 k-epsilon (k-ε) 湍流模型的带斜叶片叶轮的平底搅拌器中的湍流混合问题
- 使用 k-omega(k-ω)湍流模型的带斜叶片叶轮的平底混合器中的湍流混合问题
使用这个教程模型,可以轻松修改搅拌器的几何形状,以更好地满足其特定的搅拌器应用和建模需求。可以访问 COMSOL 案例下载页面,深入了解此模型,并下载相关的 MPH 文件。


带有 Rushton 涡轮机的档板平底搅拌器(左)和带四个斜叶片叶轮的挡板平底搅拌器(右)的模型几何形状。
意大利面挤出机
意大利面挤出机经常出现在工业化的意大利面工厂中,它们可以提供一种高效、简单和快速的方式,来生产不同形状和大小的意大利面。这些机器能够通过它们的许多组件将粗面粉(一种面粉)和水的混合物塑造成不同形状的生意大利面(如意大利细面条)。挤出螺杆是一个特别重要的组件,它在运动时将粗面粉和水转化为面团,并将其推入机器的挤出钟罩,该罩由带有许多毫米大小的孔的筛网组成。面团通过两个不同的出口,以意大利面的形式离开机器。下面最右边的图片为这种意大利面挤出机的模型。


左图:不同形状和大小的干意大利面。摄影:Karolina Kołodziejczak,图片来源 Unsplash。右图:面食挤出机的流场和几何形状,包括挤出螺杆、钟罩、毫米大小的孔和两个出口。
尽管意大利面挤出机的历史很悠久,但这些机器的效率并不完美。挤出机设计可能出现的问题包括:
- 面粉和水混合不完全
- 压力分布和挤出速度不均匀
- 面团循环不良
使用意大利面挤出教程模型,可以预测挤出机内部的条件如何导致不同面团配方出现此类问题。点击此处,详细了解此模型以及如何设置它。
家电
微波炉
在 Percy Spencer 发现微波炉多年后,其设计仍在研究和改进中。其中一个原因是,使这种普通家用电器在几分钟内煮出一顿饭的技术并非没有缺陷。许多微波炉用户普遍感到烦恼的是,该设备不能一致均匀地加热食物。当微波炉对食物的加热不均匀时,消费者就只能吃下部分冷冻、部分煮熟的早餐、午餐、晚餐或小吃。某些食物在微波炉中煮得不均匀,因为它的成分含水量不同;食物的含水量越多,加热的速度就越快。饭菜不能均匀的加热的另一个原因是由于设备在使用时会出现复杂的振荡模式。
通过 RF 建模,可以更好地了解工作中的微波炉的物理场。例如,微波炉教程模型可用于模拟微波炉烹饪马铃薯时的加热过程。在这个示例中,微波炉被模拟为一个连接到 2.45 GHz 微波源的铜盒。模型中的矩形波导将微波引向微波炉的中心。点击此处,深入探索该教程模型。
微波炉型号。
延伸阅读
想了解更多关于仿真在食品行业的应用吗?浏览以下案例,了解如何使用 COMSOL Multiphysics 研究膨化零食生产、开发屡获殊荣的大比目油炸鱼卷配方和模拟世界著名的糖果棒生产过程中所涉及的相互作用的物理现象。
参考文献
- “Wheaties®,” Wikipedia, Wikimedia Foundation, 8 September 2022; https://en.wikipedia.org/wiki/Wheaties
Wheaties 是 General Mills IP Holdings II, LLC 的注册商标。