在 COMSOL Multiphysics® 软件中求解模型后,我们可能希望将解数据拟合到在仿真域中定义的一组函数中。在之前的博客中,我们解释了如何将离散实验数据拟合为曲线。这篇博客,我们将考虑对连续的解数据进行拟合,并将介绍正交性的概念,并解释如何将解数据拟合到一组正交函数中,从而简化为一种简单方便的后处理操作。
曲线拟合的好处
在上一篇关于拟合离散实验数据的博客中,我们解释了如何将曲线拟合用于随后的仿真工作。例如,如果我们使用原始实验数据直接定义材料属性,数据中的统计波动会使求解器更难以收敛。此外,将离散数据拟合到平滑函数可以获得该函数的高阶导数,而尝试对原始数据进行数值微分可能会产生很大干扰,并且容易出错。
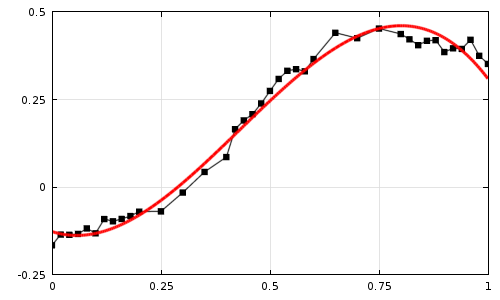
将原始实验数据(黑点)拟合为三次多项式(红色曲线)。
对 COMSOL Multiphysics® 模型中之前研究的解数据进行曲线拟合,一个立竿见影的好处就是数据压缩。如果我们可以找到与完整解具有良好一致性的线性函数组合,就可以通过共享几个函数系数的值来描述源自完整解的大部分信息。(请注意,对于数据压缩,没有放之四海而皆准的方法;COMSOL 学习中心文章:减少模型中存储的解数据量介绍了如使用探针表和选择等其他几种方法)。
此外,对连续解数据进行曲线拟合可以方便地估计解的高阶空间导数。COMSOL® 软件中许多物理场接口使用了由分段拉格朗日多项式组成的有限元离散化,默认情况下,这些多项式通常是二阶的。在这种情况下,导数不一定是连续的,而三阶或高阶导数通常是零。
最小二乘拟合概述
首先,我们来了解一下简单最小二乘拟合的基本数学原理。在用 Ω 表示的某个模拟域(或边界或边)中,假设COMSOL Multiphysics® 模型已经求解了场变量 u。我们的目标是通过将其视为一组预定义函数的线性组合来近似 u 在该域上的值,
其中,fi 是一组已知函数,ci 是必须求解的系数。
确定这些未知系数的常用方法是,求 u 及其近似值之差的 L2 范数,
然后,找到对应于此 L2 范数的局部最小值的ci。
在 Ω 内的局部最小值处,未知系数的导数必须等于零,
这里,我们使用下标 j 来避免与求和符号混淆。
假设积分号下的所有函数都可导,应用链式法则可以将它其简化
约掉系数 2,交换积分和离散求和的顺序,得到
最终得到的结果是一组有 N 个系数未知的 N 维线性方程组。例如,如果有三个多项式,就可以把这个结果写成矩阵形式,
&\begin{bmatrix}
A_{11} & A_{12} & A_{13}\\
A_{21} & A_{22} & A_{23}\\
A_{31} & A_{32} & A_{33}
\end{bmatrix}
\begin{bmatrix}
c_1\\
c_2\\
c_3
\end{bmatrix}
=
\begin{bmatrix}
B_1\\B_2\\B_3\\
\end{bmatrix}\\
&A_{ij} \equiv \int_\Omega f_i(\mathbf{r})f_j(\mathbf{r})\textrm{d}\Omega
\qquad B_{j} \equiv \int_\Omega u(\mathbf{r})f_j(\mathbf{r})\textrm{d}\Omega
\end{aligned}
因此,求解这个方程组的未知系数需要计算 次积分(注意左边的矩阵是对称的,即 fifj 的积分等于 fifj 的积分)和一组 N 个线性代数方程的解。
接下来的章节,我们将看到,如果定义了相应的函数 fi,使其在我们尝试拟合解数据的区域中正交,那么系数c i 的计算就会大大简化。
正交函数简介
讨论正交性的概念时,必须注意给出的定义不要过于狭窄。一般而言,如果 ,属于一个向量空间的两个不同向量, u 和 v 在内积
下是正交的,那么内积的确切定义可以根据向量空间而改变。
由于我们讨论的是在 n 维实坐标空间()的某个区域 Ω 上,一个空间变化的解向量对一组函数 f1(r),f2(r),…fN(r) 的曲线拟合,因此可以得到更具体的表达式,并将这些函数的内积定义为
式中,w(r) 为某个尚未定义的权函数,对于 Ω 中的所有 r,限定:w(r) > 0。
例如,,
和
在内积下正交。
也就是说,Ω 的域是一维区间 ,权函数可以简单表示为 w(x)=1。我们可以通过计算下列积分来证明这些函数的正交性
\int_{-\pi}^\pi (1)^2 \textrm{d}x &= 2\pi \qquad \int_{-\pi}^\pi (\sin x)^2 \textrm{d}x = \pi \qquad \int_{-\pi}^\pi (\cos x)^2 \textrm{d}x = \pi \\
\int_{-\pi}^\pi (1)(\sin x) \textrm{d}x &= 0 \qquad \int_{-\pi}^\pi (1)(\cos x) \textrm{d}x = 0 \qquad\int_{-\pi}^\pi (\sin x)(\cos x) \textrm{d}x = 0\\
\end{aligned}
事实上,我们可以进一步扩展这个概念,并将看到函数 ,
,
,
等在同一个内积下也是正交的。这些三角函数的正交性是傅立叶级数展开的基础。
正交函数的最小二乘拟合
现在,让我们基于对正交函数的了解,重新审视线性最小二乘拟合问题,正如之前所看到的,该问题将被简化为求解系数 ci 的集合,使得
现在,假设函数 fi 都是在内积下是正交的
你可能已经注意到了一些技巧:在谈到 n 维向量空间的内积时,我们在内积的定义中使用了微分元 dΩ,但是 dΩ 将根据我们选择的坐标系(如笛卡尔坐标系、圆柱极坐标系、球极坐标系等)而采用不同的表达形式。在稍后的示例中,我们也将看到,为了使简便最大化,我们可以选择一组在内积下正交的函数,其权函数等于所用坐标系的雅可比行列式。
由于函数的正交性,所有的非对角线项在 矩阵的左边消失了,N 个方程组现在只是一组 N 个表达式的集合,可以直接得到 ci 的值
如果将这些函数归一化,以使上述表达式的分母为 1,则得到如下所示更简单的表达式
因此,将解数据拟合到一组 N 个函数的任务已经简化为计算 N 个不同的积分。在 COMSOL® 软件中,我们可以轻松定义积分 耦合,用于计算在任何区域、边界、边或几何点集合的积分。(我们甚至不需要在定义积分 耦合后重新运行研究,只需单击更新解即可。)
在接下来的部分,我们将研究一个更真实的示例: 将镜子的变形拟合到一组 Zernike 多项式。
泽尼克多项式
光学中最常用的一个正交函数是泽尼克多项式(Zernike polynomials),际圆的径向坐标和平面角的函数,
式中,
- ρ 是径向坐标(
)
- θ 是方位角 (
)
是归一化项
是径向项
是子午项或方位项
- n 是径向指数 (
)
- m 是子午线或方位角指数(对于给定的 n,
)
需要注意的是,对于如何定义泽尼克多项式以及如何解释其指数,有几种不同的标准格式。COMSOL Multiphysics® 中使用的函数定义使用两个独立的指数来描述函数的径向和方位角相关性,符合 ANSI 和 ISO 标准(参考文献 1,2)。泽尼克多项式通常是针对单位圆定义的,但可以通过将 ρ 替换为 ρR (尽管这会影响归一化)来定义任何其他半径为 R 的圆。
下面列出了部分泽尼克多项式。
| 项 | 表达式 | 通用名 |
|---|---|---|
| 平移 | ||
| 垂直倾斜 | ||
| 水平倾斜 | ||
| 斜散像差 | ||
| 散焦 | ||
| 垂直散光 | ||
| 斜三叶像差 | ||
| 垂直慧差 | ||
| 水平慧差 | ||
| 水平三叶像差 | ||
| 斜四叶像差 | ||
| 斜次阶散光像差 | ||
| 初阶球差 | ||
| 垂直次阶散光像差 | ||
| 水平四叶像差 |
选择归一化项,以使
如果两个下标相等,则 Kronecker delta δ 等于 1,否则为 0。
与我们之前的术语保持一致,泽尼克多项式在权函数 下的单位圆上是正交的。在笛卡尔坐标和圆柱极坐标
之间转换时,权函数 ρ 可以很方便的与雅可比行列式完全匹配。
泽尼克多项式广泛用于光学领域。如果你曾经拜访过眼科医生,那么可能听说过“散光”()或“慧差”(
)之类的术语,而“近视”和“老花眼”只是“散焦”(
)的不同表述。
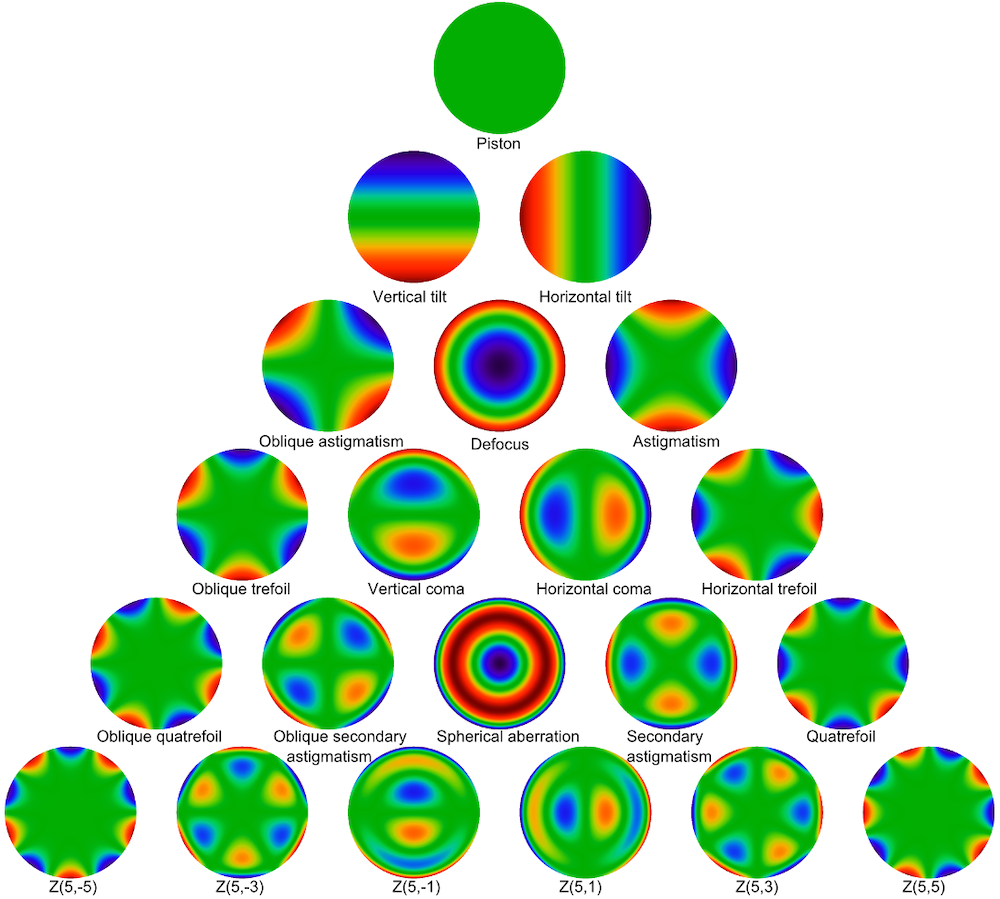
高达五阶的泽尼克多项式图。
用泽尼克多项式表示变形镜
最后,让我们用所学的知识来做一个例题。示例中的几何体是一个侧面和底部固定的平柱面镜,上表面可以自由变形。透镜被均匀加热后产生热应力,并导致镜面表面膨胀。

未变形镜(左)和变形镜(右)的几何体。
我们希望计算最适合拟合变形表面镜位移场的泽尼克多项式系数。如下图所示,为了完整起见,我们将包括所有四阶泽尼克多项式,尽管只有径向指数为 0 的项(平移 ,散焦
和球差
) 由于位移场的对称性而发挥了重要作用。为了对位移与每个泽尼克多项式的乘积进行积分,在变形表面上定义了一个积分 耦合。然后使用一些变量 节点来定义每个泽尼克多项式与解向量的乘积的积分,从而确定相应的泽尼克系数的值。
最后,我们绘制出位移场 w 在从镜面中心向外径向延伸的切线上的面外分量,并将其与泽尼克多项式的线性组合进行了比较。下图显示了平移、散焦和球差的单独组合,并对比了它们的线性组合与位移场。可以看出,解与泽尼克多项式拟合的一致性相当好,并且可以通过引入高阶项(如 )进一步优化。
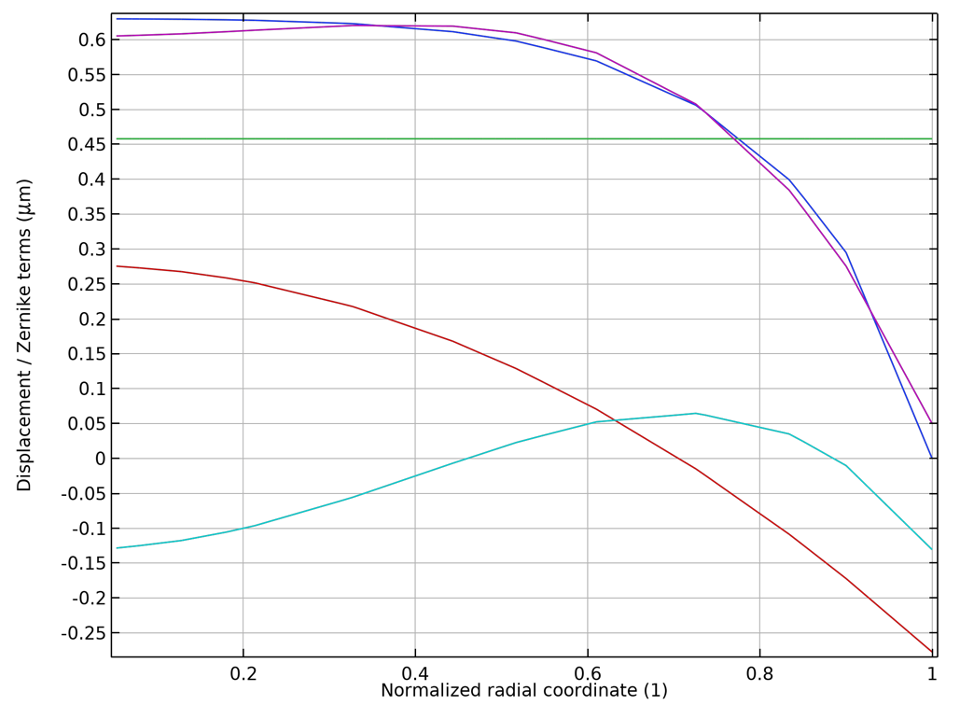
位移场(蓝色)与泽尼克多项式拟合(紫色)的对比。分别显示了平移(绿色),散焦(红色)和球差(青色)。
结论
曲线拟合不仅是一种消除实验数据中统计噪声的有效方法,还可以应用到模型求解本身,并且效果显著。将解数据拟合到一组预定义函数,尤其是正交函数中,是一种快速、方便的数据压缩方法。
下一步
点击下方按钮,进入 COMSOL 案例下载页面并下载 MPH 文件,尝试自己动手模拟这篇博客中讨论的模型。
参考文献
- ISO 24157:2008: Ophthalmic optics and instruments — Reporting aberrations of the human eye, International Organization for Standardization, Geneva, Switzerland. Amendment 1, ibid., 2019.
- ANSI Z80.28-2017: American National Standard for Ophthalmics — Methods of Reporting Optical Aberrations of Eyes. American National Standards Institute, Alexandria, VA.
涡轮分子泵是一种能够达到超高真空(UHV)条件的机械真空泵。由于气体分子之间相互碰撞概率较低,所以需要专用的数值方法模拟超低压条件下的气流。COMSOL Multiphysics® 软件提供了两种完全不同的计算方法用于模拟高度稀薄气体:角系数方法(angular coefficient method)和蒙特卡罗方法(Monte Carlo method)。在这篇博客文章中,我们介绍了如何使用蒙特卡罗方法对涡轮分子泵进行模拟。
编者注:此文最初发布于 2017 年 8 月 9 日。现已更新以反映软件的最新功能。
真空系统简介
在许多高科技工业应用(例如半导体芯片的制造)中,我们都能发现真空技术。真空环境在基础研究中也是必不可少的。例如,粒子加速器无法在正常大气压下工作,因为被加速的粒子大概率会与周围的空气分子发生碰撞。

典型的真空腔室。
在真空环境中,气体的绝对压力远低于典型的海平面大气压,后者约为 101,325 帕斯卡(Pa)或 14.7 磅每平方英寸(psi)。大气主要由氮气和氧气组成,但是在处理真空室时,必须考虑包含的每种气体,甚至腔室壁及配件的排出气体,润滑剂(升华和蒸发气体)也会对真空室压力产生重大影响。
真空泵 用于抽除真空室中的气体,从而降低真空室内压力。真空泵有许多不同的类型,包括:
- 旋片泵
- 定片泵
- 扩散泵
- 涡轮分子泵
- 低温泵
- 离子泵
通过串联的方式使用两种或多种不同类型的泵非常普遍,每种泵都有其适合的特定压力范围。例如,旋片泵或定片泵可以在大气压下排出空气,同时将真空室的压力降低到小于 0.1Pa 左右。涡轮分子泵可以达到超高真空条件(小于 10-7 Pa),但在大气压下却无法正常工作。为了将压力从大气压一直降低到超高真空,我们首先可以使用旋片泵(以这种方式使用时被称为粗抽泵)将压力降至 0.1 Pa,然后使用涡轮分子泵将压力从 0.1Pa 降低至 10-7 Pa。
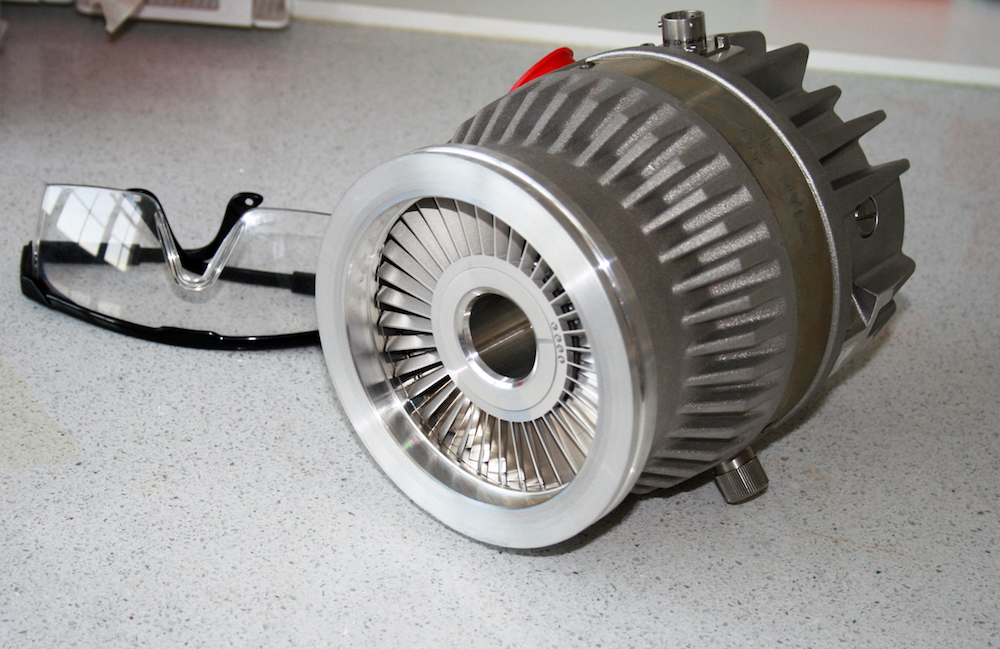
涡轮分子泵。
但要注意的是,在实际工作中真空泵并不能达到理想的真空度。在大气压和室温下,1 立方米的空气中有超过 1025 个分子。即使在超高真空中,1 立方米的空气中仍包含数万亿个分子!我们抽真空目的不是要排除所有的空气分子,而是要尽量排除足够多的空气分子,以免它们阻碍腔室内的实验或制造过程。
真空系统中的稀薄气流
涡轮分子泵只有在通过其的气流是自由分子流时 才能工作。换句话说,气体压力必须足够低,以使分子撞击周围表面的频率比分子间的碰撞的频率更加频繁。因此,该泵仅在使用粗抽泵将压力降低到约 0.1Pa 之后才能实现超真空条件。
通常,在考虑气流时,我们会将气流设想为连续流。当空气通过狭窄的通道流入房间时,这股空气会散开,并可能在所有侧面形成再循环区域。当流动的空气到达障碍物时,我们期望它能绕开障碍物流动,填充其后面的空间。由于空气中的氮、氧和其他气体分子每秒会相互碰撞数十亿次,因此它会以这种方式运动。
在极低的气压下,气体表现为自由分子流,气体流动主要由分子-壁碰撞而不是分子-分子碰撞控制。如果气体从狭窄的孔口释放到大的开放空间中,那么大多数分子将不会因分子间碰撞而向四面八方扩散,而是会沿几乎同一个方向飞出,这种现象被称为分子束射。
当气体分子撞击表面时,它们可能会被表面吸附或反射离开表面。即使表面肉眼上看起来非常光滑,分子也会在表面在随机方向上反射分子。一个合理的近似是给以不同反射角的概率分布。通常,此概率分布函数在垂直于表面的方向上对称。

通过窄管进入腔室的连续流(左)和分子流(右)的比较。
涡轮分子泵详解
设想一下,如果用平板或球拍击打球,那么在球与球拍接触时会朝不同的方向弹跳,具体取决于球拍的角度。这就是涡轮分子泵的基本工作原理。
涡轮分子泵由许多环组成,这些环相互堆叠,并沿一条公共轴线排列。其中一些环绕轴旋转,称为转子,其他的环被固定在一个固定的位置上,称为定子。一个典型的设计可能包含多对交替的转子和定子。每个环内有许多狭窄的倾斜叶片。通常,环中的每个叶片以相同的角度倾斜并且等距分布。因此,如果有 N 个叶片,那么环具有 N 倍轴向对称性。
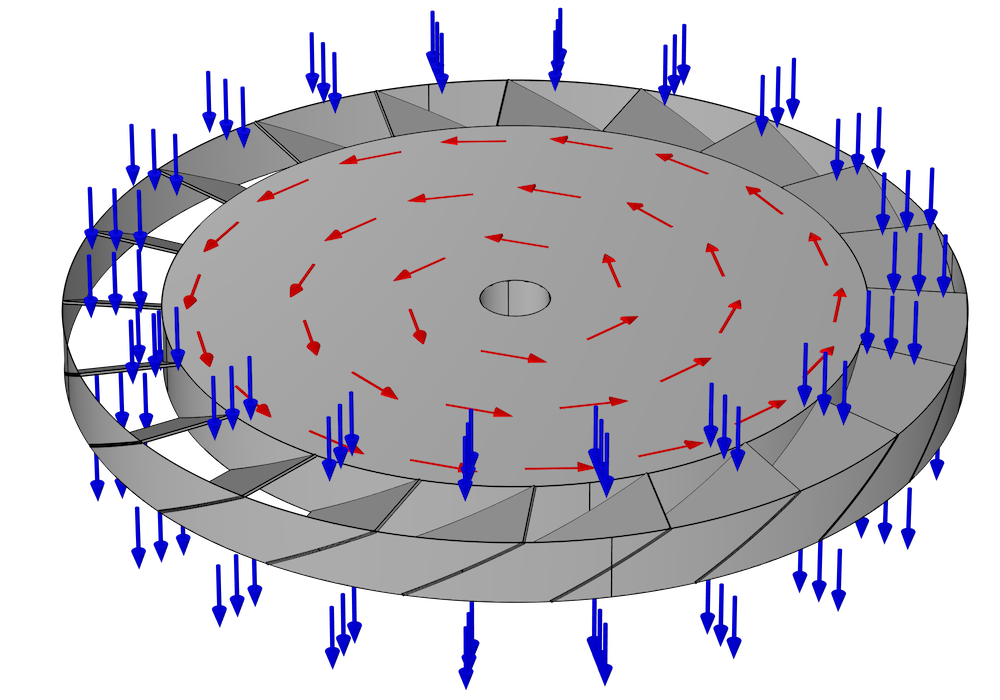
由于叶片在转子中倾斜,当分子撞击叶片时,它更有可能沿一个方向从转子弹回,而不是朝相反方向弹出。下面的图示即显示了一个没有相邻定子的单个转子中的这种运动行为。假设此叶片环逆时针旋转,如红色箭头所示。一个分子更有可能击中这些叶片之一的底面而不是顶面。这些分子更可能向下偏转(沿蓝色箭头的方向)而不是反向弹出。分子这种向下方向的优先偏转,可以减小在该转子上方区域中的气压。
为了使传输概率的差异(从上到下与从下到上)更大,叶片表面的移动速度应等于或大于分子的平均热速度。对于室温下的大多数气体,该速度约为每秒几百米,但是对于非常轻的气体(如氢气),速度明显更高。因此,当使用涡轮分子泵将腔室压力降低至超真空时,腔室中的大多数残留气体将为氢气(参考文献1)。
涡轮分子泵的叶片由被称为级 的单元组成。典型的泵级可能包含8–20个这类在转子和定子之间交替的叶片环(参考文献2)。为简单起见,我们当前的模型仅考虑了单个转子。
通常,我们建立涡轮分子泵数值模型的主要目的是预测其泵速和压力比。这些参数可以通过分子在整个叶片环上的传输概率来预测,即从顶部进入级后从底部离开的分子比率,反之亦然。
选择数值方法
在 COMSOL® 软件中,有 2 种主要的数值方法可用于模拟极稀薄气流。一种称为角度系数法,可以通过分子流模块提供的自由分子流 物理场接口使用。角度系数方法是一种视图因子计算,可以计算模型边界处的分子通量,并假设气体分子只会与壁碰撞而不会与其他分子碰撞。角系数方法的主要缺点是它是准静态的,也就是说,它忽略了分子的有限飞行时间。在这里,这是一个重要的因素,因为与分子速度相比,叶片很容易达到每秒数百米的速度。
为了充分计算叶片在涡轮分子泵的运动,我们将选择使用粒子跟踪模块下的数学粒子追踪 接口执行蒙特卡罗方法进行模拟。在蒙特卡罗模型中,我们通过求解牛顿运动定律来解决气体中单个分子的运动。由于计算成本的限制,泵中单个分子的实际数量可能太大,因此无法单独对每个分子进行建模,但是我们可以采用一个有代表性的分子群样本(例如 100,000 个)进行建模,然后对整个分子群进行推算。
用蒙特卡罗法预测气体分子在简化的涡轮分子泵级中的传输概率,该级由单个旋转叶片环组成。正如我们前面所讨论的,包含N个叶片的典型泵转子通常会表现出N倍旋转对称性。因此,我们仅考虑通过两个相邻叶片之间的单个间隙的分子,便可以进一步简化模型并降低计算成本。
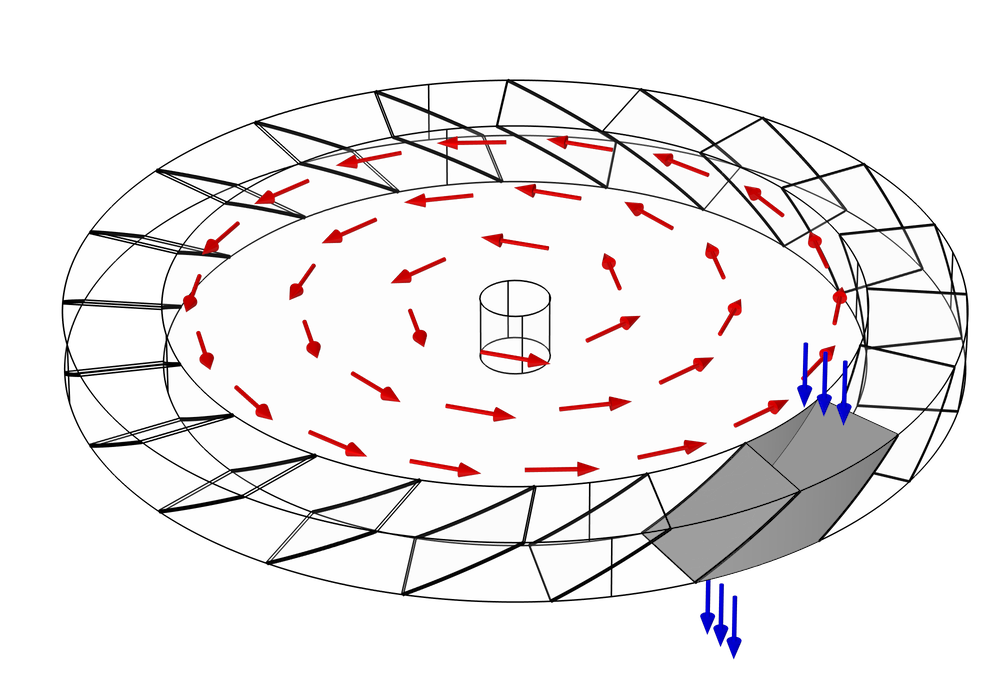
叶片之间的间隙也由两个圆柱形表面(内部的根壁 和外部的 顶壁)界定。我们可能会从前面的 2 个图看到,分子可以穿过的实际空间不是整个圆盘,而是一个距离旋转轴有一定距离的环形区域。这是因为叶片上任一点的速度与其从中心到径向的距离成正比,
因此,无论转子旋转多快,尝试将根壁移到更靠近旋转轴的方向上,收益都会减少。
角速度的实际限值是每分钟小于 100,000 转(参考资料1)。
选择参照系
在选择参照系时,我们的模拟域是前后由相邻叶片界定,而在左边和右边则由根壁和顶壁界定的空白区域。气体分子可能会从顶部和底部进入域,我们的目标是确定从顶部释放的分子中有多少会从底部出来,反之亦然。
在这里,我们遇到了另一个技术挑战:转子叶片之间的空间沿圆周运动。在移动域中进行建模时,必须决定在模型中使用哪个参照系。通常,选择下列选项之一:
- 在“实验室”参考系中建立模型。也就是说,从观察者站在静止不动的外部并观察其旋转的角度对转子进行建模。为此,我们可能必须使用专用的旋转域节点显式地使几何图形随时间旋转。从这个角度来看,分子从一个表面移动到另一个表面时遵循直线路径。
- 在连接到转子的可移动参考系中建立模型。就是说,想象一下,如果观察者能够缩小并乘坐上这些转子叶片之一,分子的轨迹将如何?在此参考系中,单个气体分子遵循的路径可能看起来是弯曲的。
在此示例中,我们将使用第二种方法建模。但是,这带来了额外的复杂性,下面我们将详细介绍。
旋转参照系中的粒子追踪
这些分子遵循牛顿第二运动定律,
其中,q 是粒子位置,mp 是粒子质量,Ft 是所有作用力的总和。
在这个示例中,我们忽略了重力,因此合力为零。但是牛顿第二定律是在惯性 参考系中制定的,这意味着它只有在观察者不加速时才成立。旋转是一种加速度,因此该模型是在非惯性 参考系中建立的。
为便于理解惯性和非惯性参考系,请想象一下在移动的卡车后面尝试执行简单的物理实验(例如,弹跳球或跟踪摆的运动)。如果卡车停止或在巡航控制系统打开的情况下以直线行驶,则这些实验将得到相同的结果。但是,如果卡车加速,减速或转弯,实验将得出不同的结果。
如果从根壁到顶壁的距离比从旋转轴到根壁的距离小得多,也就是说,
那么,作为第一近似,我们可能会忽略我们的参考系非惯性这一事实。
实际上这等效于将叶片环视为一条无限直线的叶片,它们都沿相同方向移动。这个准 2D 涡轮分子泵教程模型中做了这样的假设,并在参考文献3 进一步讨论。这种简化的假设大大减少了所涉及的计算工作量,因为它使粒子在连接到叶片的参考系中沿直线移动。当转子缓慢旋转时,这是一个合理的近似,但是随着转子角速度的增加,它的准确性将降低。
为了执行高保真的蒙特卡罗模拟,必须考虑我们的参照系在旋转这一事实。幸运的是,“数学粒子追踪” 接口提供了专门用于此目的的专用物理功能。我们可以将旋转域节点添加到模型中,用于定义在旋转参照系中追踪粒子而产生的虚拟力,
\mathbf{F}_\textrm{t} &= \mathbf{F}_\textrm{cen} + \mathbf{F}_\textrm{cor}\\
\mathbf{F}_\textrm{cen} &= m_\textrm{p}\mathbf{\Omega}\times\left(\mathbf{q}\times\mathbf{\Omega}\right)\\
\mathbf{F}_\textrm{cor} &= 2m_\textrm{p}\mathbf{v}\times\Omega
\end{align}
这些虚拟的力称为离心力 Fcen 和科里奥利力 Fcor。在这些等式中,v 是粒子速度,Ω 是旋转参考系的角速度。为简单起见,这里假设旋转轴穿过原点。

旋转参考系节点的设置。
粒子释放和边界条件
通过将旋转域 节点添加到模型,将自动定义离心力和科里奥利力。剩下的就是定义粒子释放和边界条件。
使用顶部和底部边界上的 入口 节点将分子释放到模拟域中。该模型使用热 速度分布,其中每个分子的初始速度从麦克斯韦分布中采样,并根据余弦定律采样其初始方向。
然后,从释放的分子速度中减去叶片速度,因为在实验室参考系中,与泵级相邻的区域中的气体漂移速度为零。

入口节点的设置。
叶片壁、根壁和顶壁均使用热再发射 边界条件。每当分子撞击到这些表面之一时,就会以新的随机速度和随机方向弹回到区域中。假定叶片壁和根壁与旋转参考系一起移动,而顶壁则假定固定在实验室(惯性)参考系中。对于击中顶壁的任何分子,使用内置设置从重新初始化的粒子速度中减去运动参考系的速度。

顶壁处的“热再发射”节点的设置。
结果
传输概率定义是释放的分子将从泵级的一侧穿过到另一侧,而不是被叶片弹回的比例。当叶片旋转时,我们可以定义两个不同的传输概率:正向(在上图中,从上到下)和反向(从下到上)的传输概率。
根据分子在向前和向后的传输概率,我们可以获得最大压缩比 Kmax 和最大速度因子 Wmax,
其中,M12 是正向的传输概率,M21 是反向的传输概率。
下面,让我们看一些将这些传输概率与无量纲速度比 C 进行比较的图。这是叶片速度(以均方根或均方根半径测量)与气体中分子最可能的速度之比。分子速度是分子质量和气体温度的函数。通常,分子在较热的气体中运动更快,而较轻的分子则比较重的分子运动更快。因此,涡轮分子泵在抽出氩、氮和氧等较重的物质方面表现更好,但在抽氢方面效率较低(参考文献2)。
当叶片静止时(C = 0),向前和向后的传输概率大致相等。随着叶片开始更快地旋转,正向的概率接近 1,而反向的概率接近零。
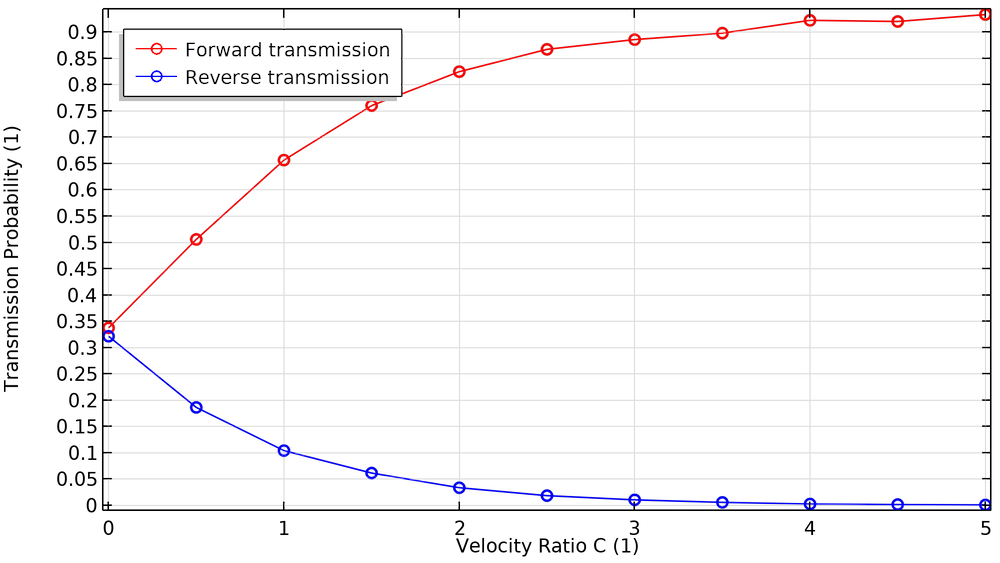
正向和反向传输概率随速度比的变化。
我们还研究了叶片的速度比如何影响压缩比和泵速。为了产生足够的压缩和速度,分子泵使用了由多个圆盘和不同类型的叶片组成的多个叶片结构。靠近腔室入口的叶片设计为具有较高的泵送速度和较低的压缩比,而靠近前级真空管线(与粗抽泵的连接部)被设计为具有较低的泵送速度和较高的压缩比。
当这些叶片的速度增加时,如下图所示,最大压缩比和速度因子增加。这些图与参考文献4中报道的类似研究非常吻合。
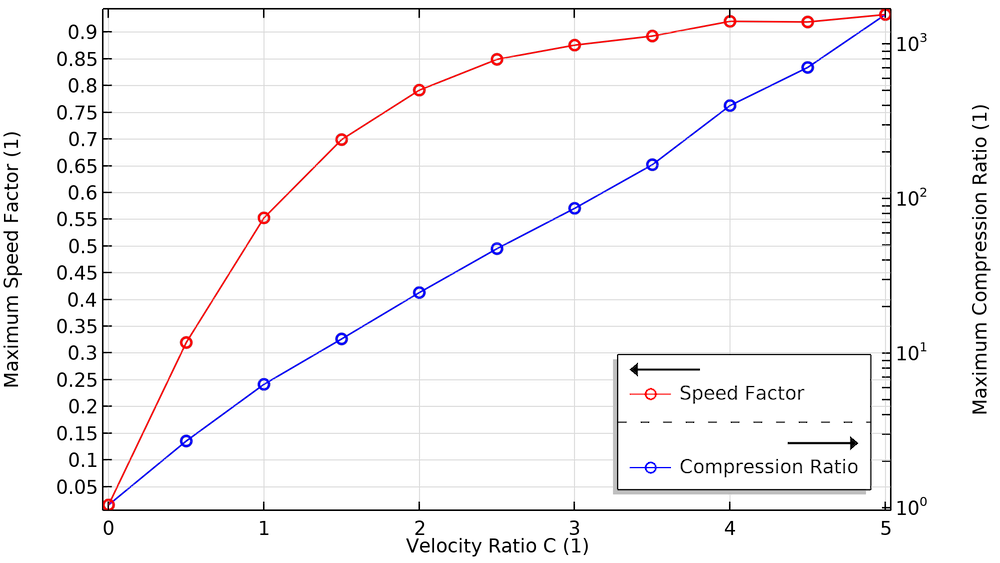
叶片速度对最大压缩比和最大速度系数的影响。
后续操作
这个示例重点介绍了几个功能,这些功能让我们更加便捷地使用蒙特卡罗方法模拟涡轮分子泵。单击下面的按钮,尝试自己建模。
了解有关 COMSOL Multiphysics® 中粒子追踪的更多信息
请查看以下有关粒子追踪的博客文章:
参考资料
- J.M. Lafferty, ed., Foundations of Vacuum Science and Technology, John Wiley & Sons, 1998.
- J.F. O’Hanlon, A User’s Guide to Vacuum Technology, 3rd ed., John Wiley & Sons, 2003.
- S. Katsimichas, A.J.H. Goddard, R. Lewington, and C.R.E. De Oliveira, “General geometry calculations of one-stage molecular flow transmission probabilities for turbomolecular pumps,” Journal of Vacuum Science & Technology A: Vacuum, Surfaces, and Films, vol. 13, no. 6, pp. 2954–2961, 1995.
- Y. Li, X. Chen, Y. Jia, M. Liu, and Z. Wang, “Numerical investigation of three turbomolecular pump models in the free molecular flow range,” Vacuum, vol. 101, pp. 337–344, 2014.
当你第一次使用 COMSOL 软件对流体中直径为几十微米或更小的粒子进行粒子追踪仿真时,你可能会注意到,瞬态求解器采用的时步比一般的情况要短得多。这通常是由于粒子的运动方程表现出 数值刚度 而导致。这篇博客,我们将介绍与粒子仿真有关的刚度的概念,并对基于粒子大小选择正确的方程提供一些建议。
示例:小球形粒子的重力沉降
以一个小球形粒子为例,当粒子以恒定速度 u (SI 单位:m/s)穿过周围流体时,遵循牛顿第二运动定律,
(1)
{d}t}\left(m_\textrm{p}\frac{\textrm{d}
\mathbf{q}}{\textrm{d}t}\right) = \mathbf{F}_\textrm{t}
式中,
- mp(SI单位:kg)是粒子质量
- q(SI单位:m)是粒子位置矢量
- Ft(SI单位:N)是作用在粒子上的净力或总力
对于在流体中沉降的粒子,其受到的总力是重力 Fg 和曳力 FD 之和,
(2)
\qquad
\mathbf{F}_\textrm{D} = 3\pi \mu d_\textrm{p}\left(\mathbf{u}-\mathbf{v}\right)
式中,
- ρp(SI 单位:kg/m3)为粒子密度
- ρ(SI 单位:kg/m3)为周围流体的密度
- g(SI单位:m/s2)为重力引起的加速度(海平面以下约为 9.8m/s2)
- μ(SI 单位:Pa s)为周围流体的动力黏度
- dp(SI 单位:m)为粒径
- u(SI 单位:m/s)为周围流体的速度
- v(SI 单位:m/s)为粒子的速度(v≡dq/dt)
重力表达式中的(ρp-ρ)/ρp 项代表浮力。当粒子(如空气中的固体粒子)比流体重得多时会取代流体,浮力值接近 1。当粒子和周围的流体密度相同时,浮力值接近于零,在这种情况下,粒子被称为悬浮粒子。
此处使用的曳力表达式来自斯托克斯曳力定律(Stokes drag law)。当粒子的相对雷诺数非常小时,适用于曳力定律:
\textrm{Re}_\textrm{r} \equiv \frac{\rho d_\textrm{p}\left|\mathbf{u}-\mathbf{v}\right|}{\mu} \ll 1此定律对于较小的粒子更有效。
假设粒子大小不变(dp 和 mp 为常数),球形粒子的质量可以表示为
(3)
结合方程1–3,我们得到粒子运动方程的简化表达式:
(4)
=
\frac{\rho_\textrm{p}-\rho}{\rho_\textrm{p}}\mathbf{g}
+
\frac{1}{\tau_\textrm{p}}\left(\mathbf{u}-\mathbf{v}\right)
这里,引入了常数 τp,
τp 具有时间单位,通常被称为 拉格朗日时间尺度 或 粒子速度响应时间,我们在下文对其进行将解释。
进一步简化方程,假设周围的流体是静止的(û=0),并且所述粒子初始为静止状态(q=0, v=0, 时间 t= 0)。假设对齐坐标系,以使重力矢量指向 –y 方向。然后,根据方程4,粒子位置的 y 分量方程变为
(5)
=
-\frac{\rho_\textrm{p}-\rho}{\rho_\textrm{p}}g-\frac{1}{\tau_\textrm{p}}v_y
给定初始条件为 qy=0 和 vy=0 时,方程 5 的精确解或解析 解为
q_y &= -v_\textrm{t}\left\{t+\tau_\textrm{p}\left[\exp\left(-\frac{t}{\tau_\textrm{p}}\right)-1\right]\right\}\\
v_y &= -v_\textrm{t}\left[1-\exp\left(-\frac{t}{\tau_\textrm{p}}\right)\right]\\
\end{aligned}
式中,vt 是自由沉降速度,
转换为无量纲变量
为了更好的理解粒子在最初的一段时间 τp 内是如何加速的,我们可以用相应的无量纲量(t´, qy´, vy´)来代替时间、位置和速度(t, qy, vy)变量,将其定义为
将这些无量纲变量代入解析解中,得到
v_y^{\prime} &= -1 + \exp\left(-t^{\prime}\right)\\\end{aligned}
在下图中,无量纲位置和速度被绘制为无量纲时间 t 的函数。该绘图表明粒子速度逐渐接近自由沉降速度,粒子加速主要发生在拉格朗日时间尺度 τp 的最初一段时间内。在此初始加速期之后,粒子位置呈线性变化。
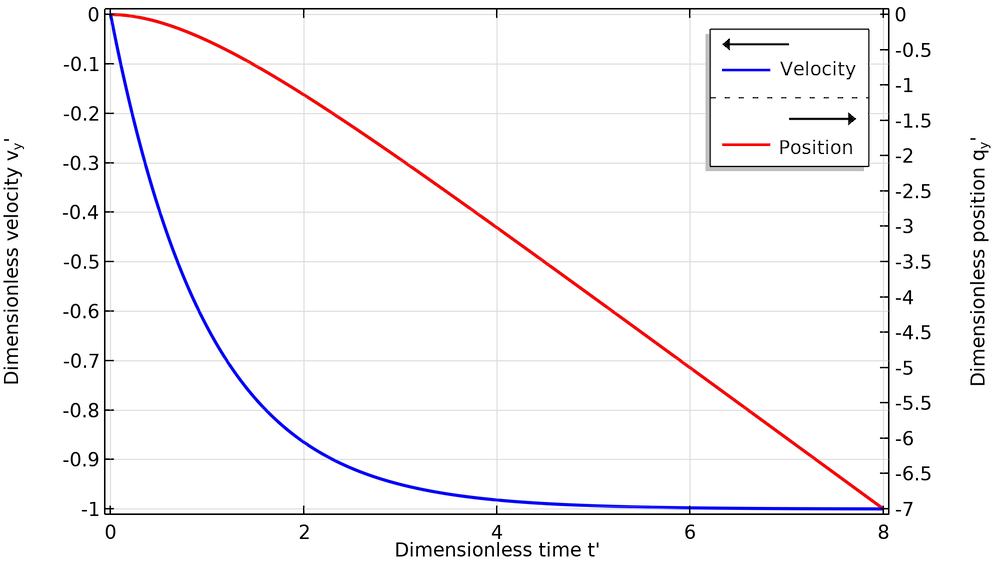
重力作用下,粒子沉降过程中的无量纲位置和速度绘图,从静止状态开始。
一些典型粒径的时间尺度
为了更好地了解粒子加速所涉及的时间尺度,假设粒子为密度 2200 kg/m3 的石英玻璃珠。下表列出了不同粒径的粒子在空气和水中的一些拉格朗日时间尺度值。
| 流体 | 粒径(μm) | 流体的动力黏度(Pa s) | 流体密度(kg/m3) | 响应时间(s) | 自由沉降速度(m/s) |
|---|---|---|---|---|---|
| 水 | 1 | 1.009×10-3 | 998.2 | 1.2×10-7 | 6.5×10-7 |
| 水 | 20 | 1.009×10-3 | 998.2 | 4.8×10-5 | 2.6×10-4 |
| 水 | 50 | 1.009×10-3 | 998.2 | 3.0×10-4 | 1.6×10-3 |
| 空气 | 1 | 1.814×10-5 | 1.204 | 6.7×10-6 | 6.6×10-5 |
| 空气 | 20 | 1.814×10-5 | 1.204 | 2.7×10-3 | 2.6×10-2 |
| 空气 | 50 | 1.814×10-5 | 1.204 | 1.7×10-2 | 0.17 |
τp 与直径平方呈线性关系意味着大粒子比小粒子具有更长的速度响应时间和更快的自由沉降速度。这会产生两个主要结果:
- 大粒子落地的速度比小粒子快得多。
- 当大粒子以一定的初始速度射入流体时,会沿着入射轨迹,并能够在曳力使其减速之前行进相当长的距离。相反,较小的粒子将更快地适应流体速度。粒子散开很可能是由于周围流体的湍流扩散所致。
数值粒子追踪仿真
上文中,方程4 具有精确的解析解。之所以能够获得精确解是因为我们做了许多简化,最主要的是流体速度 u 处处为零。在大多数真实情况中,周围流体的速度不仅不为零,而且在空间上也不均匀,因此仅靠公式不可能得到精确解。
对于更一般的问题,我们可以通过数值仿真获得近似解,其主要思想是:在初始时间 t=0 时,给定初始粒子位置 q0 和速度 v0,可以使用数值时步算法来计算一组离散时步 t1,t2,t3,……的解。为此,我们设计了各种不同的时步算法,其中有许多是在 COMSOL Multiphysics® 软件中可用。
用数值方法求解一组微分方程会引入一定量的误差,即实际粒子运动与计算得到的数值解之间的差异。虽然我们通常无法从数值仿真中获得完美的解,但当t1,t2–t1,t3–t2 等时间间隔减小时,可以将模拟的粒子运动变得更加精确作为首要目标。
需要权衡的是,如果时步较小,则需要花更多的时步才能达到相同的输出时间。最终,这可能会导致 实际运行时间 显著增加,这意味着必须等待较长的时间才能完成仿真。数值仿真工程师必须始终在求解精度和时间之间寻求合理的平衡。
COMSOL Multiphysics® 中的粒子追踪模块的 流体流动颗粒跟踪 接口通过数值求解牛顿第二定律来模拟周围流体中单个粒子的运动。基本上,此接口可求解方程1,同时允许在方程右侧添加各种不同的力。该接口还包括用于设置初始粒子位置和速度,以及检测和处理粒子与周围几何的表面碰撞的各种选项。
处理小粒子和长时间尺度
在许多实际应用中,粒子追踪模型所需求解时间的范围远大于拉格朗日时间尺度 τp。假设我们要在 1s 的总仿真时间内追踪直径约 20μm 的石英玻璃颗粒在水中的运动。由上述表格可知,这样的小粒子的拉格朗日响应时间约为 5×10-5s,所以总仿真时间约为 2000τp。如果我们想在几分钟或几小时时间跨度内追踪更小的粒子,那么总仿真时间可能比 τp 大几百万倍。
下图显示了瞬态求解器在跟踪这些 20μm 的粒子时所采取的时步日志。在 步骤1 中输出时间的范围:瞬态 节点已被设置为 range(0,0.1,1),这意味着它将仅以 0.1s 的倍数存储输出。但是,这并不妨碍求解器在必要时采用更短的时步来获得精确的解。如如所示,求解器先从 1ms 或更小的时间步开始,然后在粒子接近其最终速度时逐渐采用更大的时步。
如下图中的步骤 24 所示,在 COMSOL Multiphysics 中,粒子追踪物理场接口通常使用严格的时间步算法,该算法至少要求求解器所采取的某些步长与输出时间一致。但这并不是所有物理场的要求;对于某些物理场接口,可以通过在求解器所采用的最近步长之间进行插值获得输出时间。

在研究接近尾声时,粒子几乎不再加速,所以时步可能会很大。最终,求解器需要 24 个时步才能在 0.1s 获得第一个输出时间,但是只需要再增加 12 个时步就能在 1s 最终求解。

重力沉降中的粒子运动方程是 刚性常微分方程(刚性 ODE广义 α,这是一种二阶隐式时步法,非常适合用于处理刚性问题。如果需要额外的稳定性,可以在瞬态 求解器 设置中调整 放大高频 的数值阻尼项。因此,随着粒子速度接近自由沉降速度,时步变得更大。(显式 Runge–Kutta 方法 RK34 采用了 7425 个时步来求解相同的问题!)
但是,如果粒子在几个不同的释放时间进入仿真域,或者背景流体速度在空间上不均匀(这样粒子在以后的研究中仍会加速),求解器可能直到最终时间都会一直采用如此小的时步。如果我们尝试在很长的仿真时间内追踪非常小的粒子,最终将需要大量时间才能完成这些研究,因为求解器可能需要成千上万甚至数百万时步。
使用 入口 边界条件将粒子释放到仿真域可能会使 COMSOL® 软件新用户感到困惑。假设这些粒子被分配了初始速度并指向仿真域。从上文的截图可以看出,初始时步大小(总仿真时间为 1 s)为 1 ms。如果初始时步仍然远大于 τp,则曳力可能会过度补偿,导致粒子速度短暂改变方向并指向入口 边界。如果发生这种情况,粒子可能会错误地检测到与入口 边界的碰撞,使它们卡在此处。
处理粒子追踪模型中的数值刚度
有两种方法可以求解流体中粒子运动的数值刚度模型,即输出时间间隔比 τp 大几个数量级的模型。
第一种是我们所说的“强力”方法:只需告诉求解器采用更小的时步即可。如果不想生成大量的输出(可能会创建大量文件大小),可以不考虑输出时间,而是在求解器序列的瞬态求解器设置中指定一个较小的时间步或最大时间步。

另一种方法从 COMSOL Multiphysics® 5.6 版本开始引入,即从 方程4 中删除惯性项。首先,我们把方程4 改写成一对耦合的一阶方程,
\frac{\textrm{d} \mathbf{q}}{\textrm{d}t} &= \mathbf{v}\\
\frac{\textrm{d} \mathbf{v}}{\textrm{d}t} &= \frac{\rho_\textrm{p}-\rho}{\rho_\textrm{p}}\mathbf{g} + \frac{1}{\tau_\textrm{p}}\left(\mathbf{u}-\mathbf{v}\right)\\
\end{aligned}
然后,仅假设曳力始终与其他作用力处于动态平衡,而不是在 τp 最初一段时间完全解析粒子运动,
(6)
+
\frac{1}{\tau_\textrm{p}}\left(\mathbf{u}-\mathbf{v}\right)
=
\mathbf{0}
换句话说,即 仅假设粒子立即达到其自由沉降速度。如果达到自由沉降速度所需的时间比总仿真时间小很多数量级,那么这是一个合理的近似值。方程6 可用于求解 v,
或者,使用更通用的形式,
(7)
其中,Fother 是除曳力以外的其他所有作用力的总和。
然后,我们要做的就是把 v 的表达式对时间进行积分以获得粒子位置 q。
请在 粒子释放和传播 部分,选择 流体流动颗粒跟踪 接口要求解的方程组。从公式列表中,可以选择以下选项之一:
- 牛顿:求解方程1
- 牛顿,一阶:将方程1 分离为 q 和 v 的一对耦合一阶方程,然后求解它们
- 牛顿,忽略惯性项(自版本 5.6 起可用):使用方程7 定义速度的简化公式,然后求解 q
- 无质量:一种更简化的公式,其中直接指定 v 来求解 q

需要注意的是,牛顿 和 牛顿,一阶公式 可用的内置力的数量略多于 牛顿,忽略惯性项 公式。这些力明显取决于粒子速度或已被排除的其他粒子的相对位置。

牛顿 公式中可用的力。

牛顿,忽略惯性项 公式中可用的力。
下面是 COMSOL 案例库中使用 牛顿,忽略惯性项 公式来追踪长求解时间内的很小的粒子的示例:
由于粒子足够大导致惯性对粒子运动具有显著影响,以下示例使用了 牛顿 公式追踪:
结语
当使用流体流动接口的粒子追踪模拟流体中的小颗粒运动时,通常应从估计与粒子相关的拉格朗日时间尺度 τp 开始,
并将此时间尺度与要模拟的求解时间范围进行比较。
如果具有不同粒径的分布,应基于最小粒径进行此估算,因为模型中最小惯性粒子决定了运动方程的数值刚度。
如果要在比速度响应时间大得多的时间范围内预测粒子运动(比如几千倍甚至更多倍),则应该考虑惯性是否在粒子运动中实际起着重要作用。如果不是,则可以从列表中选择 牛顿,忽略惯性项(从 5.6 版本开始可用)。
如果仍要考虑惯性,可以使用 牛顿 或 牛顿,一阶 公式。但是,请注意,要求解的方程组是数值刚性的,可能需要手动减小求解器采取的时步大小,以防止粒子位置和速度发生非物理振荡。
电子枪常用于阴极射线管、电子显微镜、光谱仪和粒子加速器中,其工作原理是从热阴极或等离子体中提取电子,然后将其加速到高动能。设计制造电子枪的一个主要挑战是电子互相排斥,因此电子束容易散开。今天,我们将讨论如何对一种最早设计用来抵消这种静电斥力的电极配置进行模拟——皮尔斯电子枪。
电子枪设计
一个好的电子枪设计必须能够做到以下几点:
- 提取足够多的电子,即获得足够的电子束流
- 将电子加速到一定的动能
- 将光束聚焦在特定位置
通常,当电子从阴极或等离子体源发射出来时,速度相当慢,然后它们会被外部场加速。一种非常简单的加速方法是使电子束通过一个固定电势的金属栅极。
两个带电粒子之间的力
所有发射的电子束之间都会产生相互斥力。考虑在位置 r 1 和 r 2 处的两个带电粒子,其电荷分别为 q1 和 q2。根据库仑定律,可以计算粒子 2 施加在粒子 1 上的力,
{4\pi\epsilon_0}\frac{\mathbf{r}_1-\mathbf{r}_2}{\left|\mathbf{r}_1-\mathbf{r}_2\right|^3}
其中,ε0=8.854187817×10-12F/m 是一个被称为真空介电常数的物理常数。
如果 q1 和 q2 具有相同的符号(即,两个粒子都带正电或负电),则粒子 1 上的力指向粒子2的反方向。如果一个粒子带正电而另一个粒子带负电,则粒子1上的力将指向粒子2。因此,同性电荷相斥,异性电荷相吸。
随着粒子彼此靠近,吸引力或斥力会变得更强。如果将两个电子之间的距离缩小一倍,它们彼此施加的斥力将增加四倍。
大量带电粒子之间的力
大多数现实世界的系统都包含大量的电子,而不仅仅是两个。作用在电子上的总库仑力是所有其他粒子施加的力之和。例如,作用在第一个粒子上的总力为
其中,N 是电子总数。
想象一个包含许多电子的圆柱形电子束。对于靠近电子束中心的电子,在任一侧上都有相同数量的其他电子,因此,如果我们取作用于该电子的力的矢量和,则库仑力将大部分被抵消。另一方面,对于靠近电子束边缘的电子,净力会将其推向离中心更远的地方。因此,如果束流电子最初是彼此平行移动的,则随着电子束传播,它们将开始扩散或发散。
发散的电子束。电子束在电子速度平行的束腰(左)被释放。在右侧,电子向四面八方扩散。
查看演示电子束如何在自由空间中发散的示例,请参阅 COMSOL 教程模型自然电位引起的电子束发散和相对论发散电子束引起的电子束发散。
导致电子束扩散的斥力在束流电子最慢的的地方最强,因为这些区域通常具有最高的电荷密度。因此,设计电子枪时的关键技术挑战之一通常是在束流电子发射之后立即将电子束聚焦在第一加速间隙中(参考文献1)。
寻找最佳电极形状
我们的目标是设计一种电子枪几何形状,以使电极的形状抵消电子束之间的库仑斥力,从而使电子束沿直线传播而不会扩散。
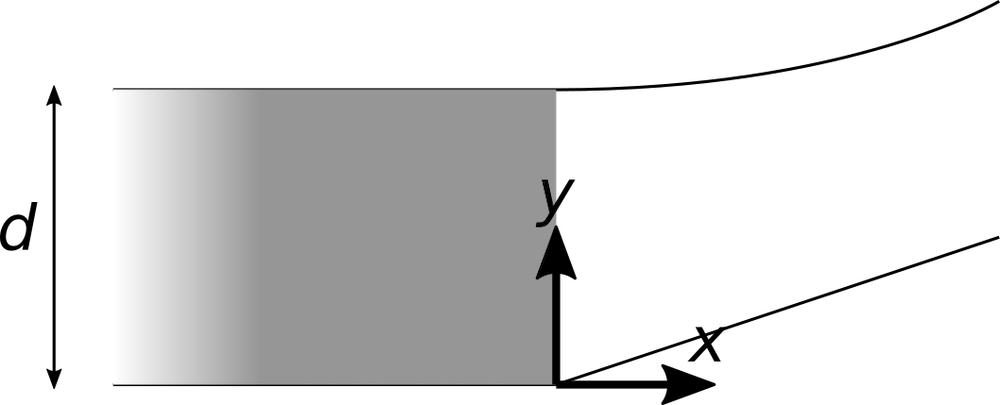
首先,考虑在平面外(z)方向上的二维薄电子束是均匀的。电子束将沿正 y 方向传播。束流电子首先从位于 y=0 的阴极(V=0)发射出来,并被吸引到位于某个高度 y=d 的阳极(V=V a)。
让我们从一个简单的解开始,其中电子束在x方向上无限宽。在这种情况下,任何电子束都可以被认为是在电子束的中心,左右两侧的电力会相互抵消。
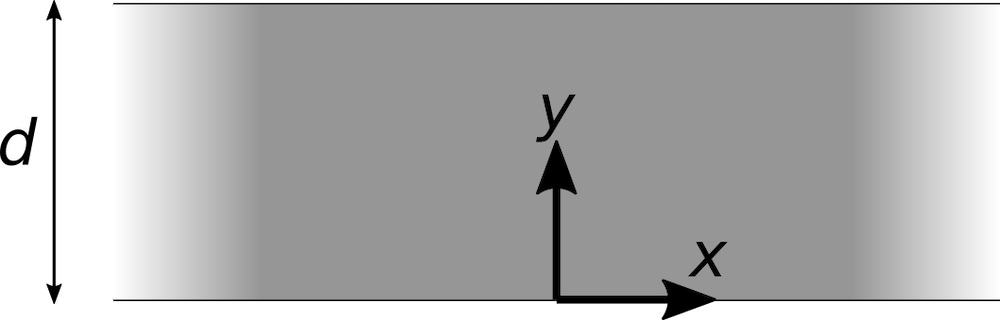
在两个扁平电极之间的简单薄电子束,在 +x 和 – x 方向上无限延伸。
在不导致电子向后排斥的情况下,理论上可以从阴极提取的电流存在一个最大值。这就是所谓的空间电荷极限,而在此电流下释放电子的阴极就是空间电荷极限。在两个平行电极之间进行空间电荷极限发射期间,间隙中的电势遵循 Child 定律(参考文献2)给出的分布,
{d}\right)^{4/3}
现在假设电子仅在 x < 0 区域中流动,并且 x > 0 区域中没有电荷。
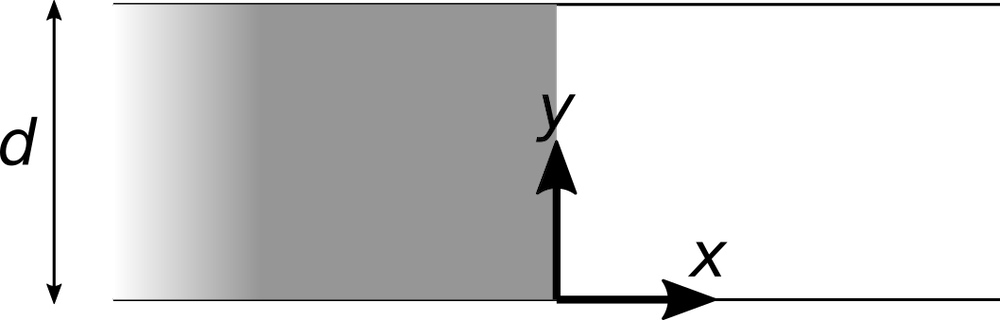
如果电极保持其扁平形状,则由于电子束中的静电排斥作用,一些靠近 y 轴的电子将溢出到 x > 0 的区域中。
因此,因为电子束边缘附近的电子感觉到来自其他电子的库仑力不平衡,所以当电子束具有有限的尺寸时,会发生电子束的发散或扩散。在下一节中,我们将介绍一种分析方法来更改电极的形状,以使电子束直接朝上,并且没有电子溢出到 x > 0 的区域中。
电子枪设计的皮尔斯方法
假设阴极和阳极在 x < 0 区域中仍然是扁平的,但是现在它们在 x > 0 区域中呈现不同的形状。这些电极形状的确切功能形式尚不清楚。
因为在x > 0的区域中没有电荷,所以电势必须满足拉普拉斯方程,
考虑复数u=y+ix。皮尔斯的方法(参考资料 1、3)首先观察到 u 的任何二次微分函数(称为 f(u))也将满足拉普拉斯方程。这可以通过反复应用链式法则来证明,
\frac{\partial^2 f}{\partial x^2} + \frac{\partial^2 f}{\partial y^2}
&= \frac{\partial}{\partial x}\left(\frac{\partial u}{\partial x}\frac{\partial f}{\partial u}\right)
+\frac{\partial}{\partial y}\left(\frac{\partial u}{\partial y}\frac{\partial f}{\partial u}\right)\\
&= \frac{\partial}{\partial x}\left(i\frac{\partial f}{\partial u}\right)
+\frac{\partial}{\partial y}\left(\frac{\partial f}{\partial u}\right)\\
&= \frac{\partial u}{\partial x}\frac{\partial}{\partial u}\left(i\frac{\partial f}{\partial u}\right)
+\frac{\partial u}{\partial y}\frac{\partial}{\partial u}\left(\frac{\partial f}{\partial u}\right)\\
&= i^2\frac{\partial^2 f}{\partial u^2} + \frac{\partial^2 f}{\partial u^2}\\
&= -\frac{\partial^2 f}{\partial u^2} + \frac{\partial^2 f}{\partial u^2}\\
&= 0
\end{align}
考虑到这一点,将 x > 0 区域中的电势定义为 f 的实部,
然后,V 在该无电荷区域也将满足拉普拉斯方程。为了确保电势在 x=0 处连续,V 必须满足 Child 定律(参考文献2)给出的电势分布,
\right)^{4/3}\right]
阴极只是在复平面中满足 V=0 方程的一组坐标。类似地,阳极是在复平面中满足 V=Va 方程的一组坐标。
在这一点上,用圆柱形电极坐标重写 u 很方便,
注意上式中,θ=0 是正 y 方向而不是 x 方向。现在,我们对于 x > 0 区域中的电势的表达式为
{d}e^{i\theta}\right)^{4/3}\right]
由于 r 和 d 是实数,因此可以简化为
然后调用欧拉公式得出最终结果
\right)^{4/3}\cos\frac{4\theta}
{3}
现在,阴极和阳极的形状就是刚插入最后一个表达式时分别给出 V=0 和 V=Va 的曲线。
V=0 的解是直线
= \frac{\pi}{2}
或与电子束传播方向成 67.5° 角。
V = Va的解是曲线,
因此,皮尔斯枪的设计算法预测,使用与电子束传播方向成 67.5° 角的直阴极和弯曲阳极,可以使电子束完全保持直线。
创建 COMSOL Multiphysics® 几何
在上一节中发现的阳极曲线渐近地接近阴极线,但从未完全与阴极线相吻合。完美的皮尔斯电子枪在正 x 方向无限延伸,因此我们必须在某个点任意切断它。
在下图中,直线是阴极,而其上方的长曲线是阳极。这两条线可以无限远地延伸,但永远不会相遇。因此,对于更实用的模型,我们绘制了一条与阴极和阳极都相交的线,然后使用 COMSOL Multiphysics® 中的转换为实体操作来形成由这些曲线所界定的区域。相交线段垂直于阴极绘制,因为我们希望电场指向该方向。
左侧的实心矩形是电子束传播区域,直线 x=0 是这里的一条对称轴。因此,整个皮尔斯枪的几何形状在电子束的两边都具有相同的弯曲阳极形状。

在截断阴极和阳极曲线之前的皮尔斯电子枪的几何形状。
对粒子场相互作用进行建模
在此模型中,我们使用专用的空间电荷受限发射多物理场耦合节点在正 y 方向释放空间电荷受限的电子束。然后,为了考虑束流电子之间的相互静电斥力的影响,我们使用了专用的电-粒子场相互作用多物理场耦合。这导致束流电子对域中的空间电荷密度做出贡献,然后在求解电势时将其包括在静电接口中。
然后,获得用于电势和粒子轨迹的自洽解的最终算法如下:
- 跟踪粒子,而无需考虑束流电子之间的静电排斥。根据此解,估算电子束中的空间电荷密度。
- 使用估计的空间电荷密度以及阴极和阳极表面的边界条件,计算出静态电势。
- 使用上一步中的电势来定义粒子上的电力。再次跟踪粒子,并计算电子束中的空间电荷密度。
- 继续在步骤 2 和 3 之间交替进行固定次数的迭代,或者直到解在迭代之间没有明显变化为止。
结果
镜像 数据集用于反映y轴上的电势分布。下图显示了根据其速度着色的粒子轨迹,其中绿色是最快的。域中的空间电荷密度以灰度绘制,阴影越深表示空间电荷密度越大。显然,电荷密度在靠近阴极的狭窄区域中最大,并且随着粒子加速而减小。
皮尔斯枪中的电势分布和粒子轨迹。
以下动画显示了粒子在接近阳极时如何加速。在这里,灰度背景显示了一些等电位轮廓。电子束区域中的粒子沿直线移动,并且电子束横截面中的等电位轮廓是水平的,这都很好地表明倾斜的阴极和弯曲的阳极正确地平衡了电子束中的静电斥力。
自己尝试
请单击下面的按钮,下载皮尔斯电子枪模型。
延伸阅读
在另一个模型Child 定律基准指南中,提供了有关 Child 定律及其推导的一些有用的理论细节。
Child 定律是基于一个简化的近似,它忽略了释放电子的热速度。实际上,室温下的粒子离开阴极后,可以以每秒几百米的速度四处飞行。要了解有关发射电子的热分布及其对空间电荷受限电子发射(有时称为 Langmuir-Fry 模型(参考文献4,5))的影响的更多信息,请参见平面二极管中的热电子发射示例。
参考文献
- S. Humphries, Stanley,Charged Particle Beams, Dover, 2013.
- J.R. Pierce, Rectilinear electron flow in beams, Journal of Applied Physics, vol. 11, no. 8 pp. 548–554, 1940.
- C.D. Child, “Discharge from hot CaO”, Physical Review (Series I), vol. 32, no. 5, pp. 492–511, 1911.
- T.C. Fry, “The thermionic current between parallel plane electrodes; velocities of emission distributed according to Maxwell’s law”, Physical Review, vol. 17, no. 4, pp. 441–452, 1921.
- I. Langmuir,“The effect of space charge and initial velocities on the potential distribution and thermionic current between parallel plane electrodes”,Physical Review, vol. 21, no. 4,pp. 419–435, 1923.,
在进行光学设计分析时,不仅要考虑光强,还要考虑偏振。精确操控光偏振可以滤除不需要的光源,极大地提高图像质量,例如,最大限度地减少眩光。了解和操控光偏振的一个有用的方法是利用菲涅尔棱体。借助 COMSOL Multiphysics® 软件,工程师可以模拟菲涅尔棱体和类似单元对光学系统中光偏振的影响。
操控线偏振光和圆偏振光
19 世纪初,因在光学领域的研究和发明而闻名的 Augustin-Jean Fresnel 是第一位将光描述为线偏振、圆偏振或椭圆偏振的科学家。在线性极化平面电磁波中,电场的两个横向分量的相位相同。我们可以将这些分量看作正弦或余弦函数,它们在同一位置达到最大值,也在同一位置降为零。下图显示了线偏振波的波形;波本身的电场显示为黄色,x 和 y 分量分别显示为红色和绿色。
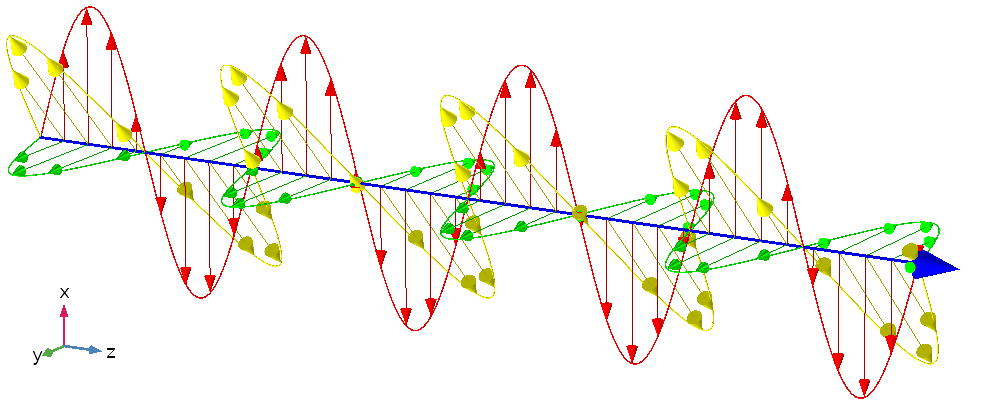
线偏振平面电磁波。
将上图所示的线偏振波与下图所示的圆偏振波进行比较。电场的 x 和 y 分量大小相等,但偏移了 90° 相位延迟。因此,当一个分量达到最大值或最小值时,另一个为零。最终的效果是这两个分量的总和具有类似螺旋的形状,因此被称为“圆偏振”。
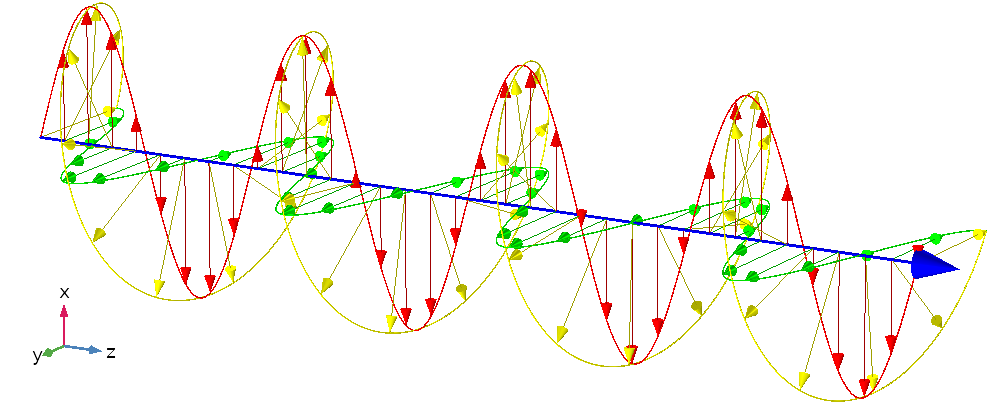
圆偏振平面电磁波。x 和 y 分量分别以红色和绿色显示。传播方向用蓝色显示,总电场幅度用黄色显示。
菲涅尔对线偏振和圆偏振辐射的发现支持了他的假设,即光是一种纯横向波(没有纵向分量),这意味着电场和磁场的振荡总是垂直于传播方向。通过进一步研究光偏振,他解释了光的全内反射不会像之前认为的那样使入射的线偏振光去偏振,而是将其变为椭圆或圆偏振光。全内反射产生的圆偏振光可以很方便地通过一个玻璃平行六面体来证明,其中光线在两个相对的面上发生全内反射——这种设置现在被称为菲涅尔棱体。
菲涅尔棱体 是一种操控光偏振的玻璃棱镜。入射光是以与入射平面成 45° 角入射的线偏振光。然后光在两个不同的面上产生全内反射。每一次全内反射都会导致在入射面和垂直于入射面的电场分量之间产生 45° 的相位延迟,总相位延迟为 90°。因此,出射光是圆偏振。
通过使用 COMSOL Multiphysics® 软件及其附加的射线光学模块,工程师可以预测光在光学系统中传播时的偏振。这是因为射线光学模块使用了 Stokes-Mueller 算法或简单的 Mueller 算法来记录光强度和偏振,它可以完全表示任何偏振状态。下一节,我们将介绍一个教程模型,该模型演示了一个特定入射角在菲涅尔棱体中将光从线偏振变为圆偏振。
使用 COMSOL Multiphysics® 模拟菲涅尔棱体
菲涅尔棱体几何形状是一个简单的未镀膜玻璃棱镜,呈平行六面体形状。下图是一个简单的几何图形。
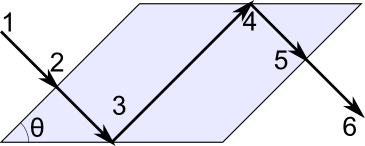
线偏振光(1)进入棱镜(2)。这束光与入射平面成 45° 线偏振——也就是说,位于屏幕中并垂直于屏幕的电场分量具有相等的幅度,并且它们是同相位的。棱镜有一个角度(θ),如果设置得当,它将在全内反射的每个实例(3 和 4)期间导致正交电场分量之间的 45° 相位延迟。然后,光离开棱镜(5)。出射光(6)现在是圆偏振的。位于屏幕中并垂直于屏幕的电场分量仍然具有相同的幅度,但它们的相位现在相差 90°。
在未镀膜表面上由全内反射引起的相位延迟的确切值取决于表面任一侧的折射率 n1 和 n 2,以及入射角 θ。这些量与相位延迟之间的关系可以由斯涅尔定律和菲涅尔方程推导出来。(有关方程的更多详细信息,您可以查看Fresnel Rhomb 模型文档。)
\left(\frac{\cos\theta\sqrt{\sin^2\theta – \left(n_2/n_1\right)^2}}
{\sin\theta}\right) = 45^{\circ}
该模型由两项研究组成。首先,求解给出所需相位延迟 45°的 θ 值。然后,使用该角度定义射线光学模拟的几何形状。
研究 1:求解入射角
首先,可以使用全局常微分方程和微分代数方程接口求解上述方程,在折射率比为 n = 1/1.51 的每个全内反射期间,导致 s 偏振和 p 偏振分量之间相位延迟 δ = 45° 的入射角。(即使这个方程不是常微分方程或微分代数方程,仍然可以使用这个接口来求解。)在这个例子中,θ 值是 0.84855 弧度或 ~48.618°。
研究 2:追踪射线的路径
接下来,可以使用几何光学 接口来追踪射线通过菲涅尔棱体的路径,因为它以 全局常微分方程和微分代数方程 接口计算的入射角进行全内反射。请注意,在这个过程中,光是线偏振的,其偏振方向与入射平面成 45° 角。
从研究 1 获得的入射角值(0.84855 弧度)可用于设置菲涅尔棱体的模型几何形状,这是一个平行四边形拉伸成的 3D 几何形状。首选使用 3D 几何,因为它有助于说明射线偏振状态,因为 3D 射线轨迹 图可以显示偏振椭圆。在这个步骤中,沿每条光线轨迹计算的斯托克斯参数用于描述光的线偏振或圆偏振程度。
评估模拟结果
现在,我们来仔细看看前面提到的射线轨迹 图中的模拟结果。在该图中,线偏振射线从棱镜的左侧进入。颜色表示沿射线的光程长度,沿射线路径的圆形和椭圆表示偏振。沿每个圆/椭圆周边的箭头显示瞬时场矢量的旋转方向。
当光穿过菲涅尔棱体时,线偏振射线在经过一次全内反射后变为椭圆偏振。在两次全内反射之后,椭圆偏振变为圆形,这意味着光是圆偏振的。
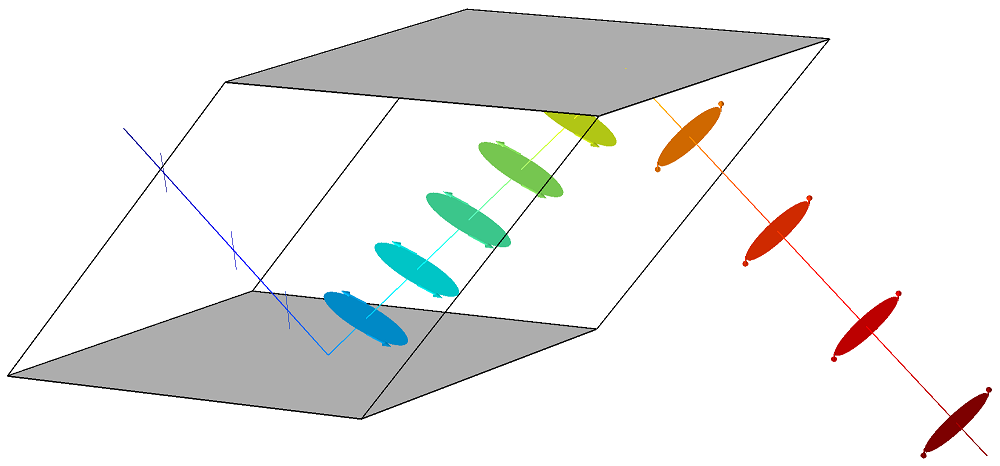
菲涅尔棱体中的射线传播。
在这个摄像角度,出射光是圆形的可能并不明显。但是通过旋转图形窗口中的 3D 图,就可以看到光从线偏振变为椭圆偏振,再变为圆偏振。
动画显示了入射光在菲涅尔棱体中的线偏振(δ = 0),一次反射后的椭圆偏振(δ = 45°),以及两次反射后的圆偏振( δ = 90°)。
可以通过绘制斯托克斯参数的比率,以另一种方式可视化这种偏振,结果如下图所示。首先,光是线偏振的,比率为零。在第一次全内反射之后,该比率的值在 0 和 1 之间,表明椭圆偏振程度不同。然后,在第二次全内反射 之后,幅度几乎完全一致,与圆偏振更加吻合。
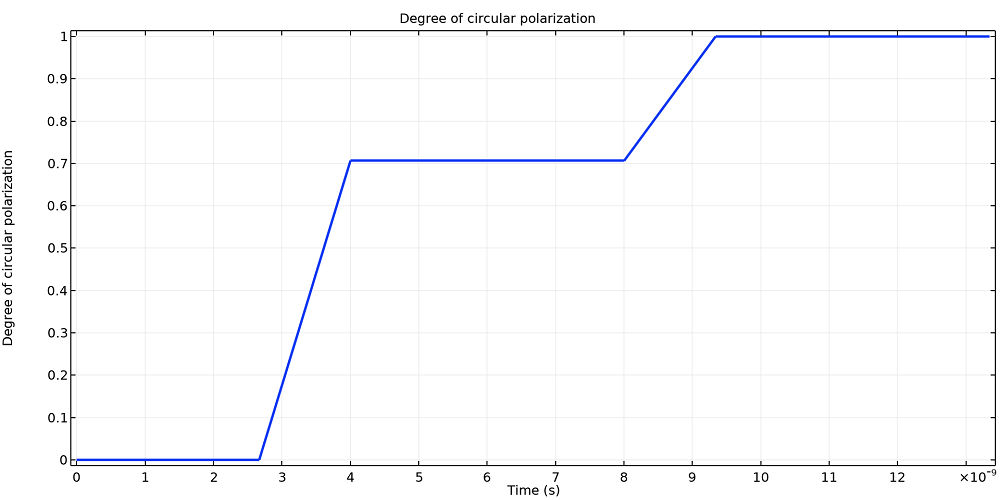
将第四和第一斯托克斯参数的比率绘制为光程长度的函数。
后续步骤
想要尝试模拟本文中介绍的菲涅尔棱体模型吗?请单击下面的按钮,然后,在 COMSOL 案例库中下载此示例的详细分步教程文档和随附的 MPH 文件。
菲涅尔棱体教程的一个自然扩展是在棱镜表面应用薄介电涂层。介电涂层会影响界面处的菲涅尔系数;因此,它们会影响面内和面外电场分量之间的相位延迟。全内反射薄膜无色散移相器(TIRTF APS)就是一个相关示例。它通过薄膜抵消玻璃中折射率的频率依赖性,从而使出射光在很宽的波长范围内保持圆偏振。
扩展阅读
想了解更多关于射线光学仿真的信息吗?请阅读下面这些博客:
现代光学系统通常需要在高海拔、太空、水下以及激光和核设施等恶劣的环境中运行,并且往往需要承受结构载荷和极端温度。通过数值模拟进行结构-热-光学性能(structural-thermal-optical performance ,STOP)分析是获取所有这些环境影响最准确的方法。STOP 分析是典型的多物理场问题,本文,我们将通过一个案例模型介绍如何使用 COMSOL Multiphysics® 软件耦合结构、热和光学效应。
案例模型:Petzval 透镜系统
考虑一个热真空腔室内的 Petzval 透镜系统,其中真空室壁保持在一个非常低的温度(可能是为了模拟外太空),镜头系统则朝在更高的温度下面向一个相邻的空间(可能是模拟实验室测试)。透镜系统模型几何的分解图如下所示。
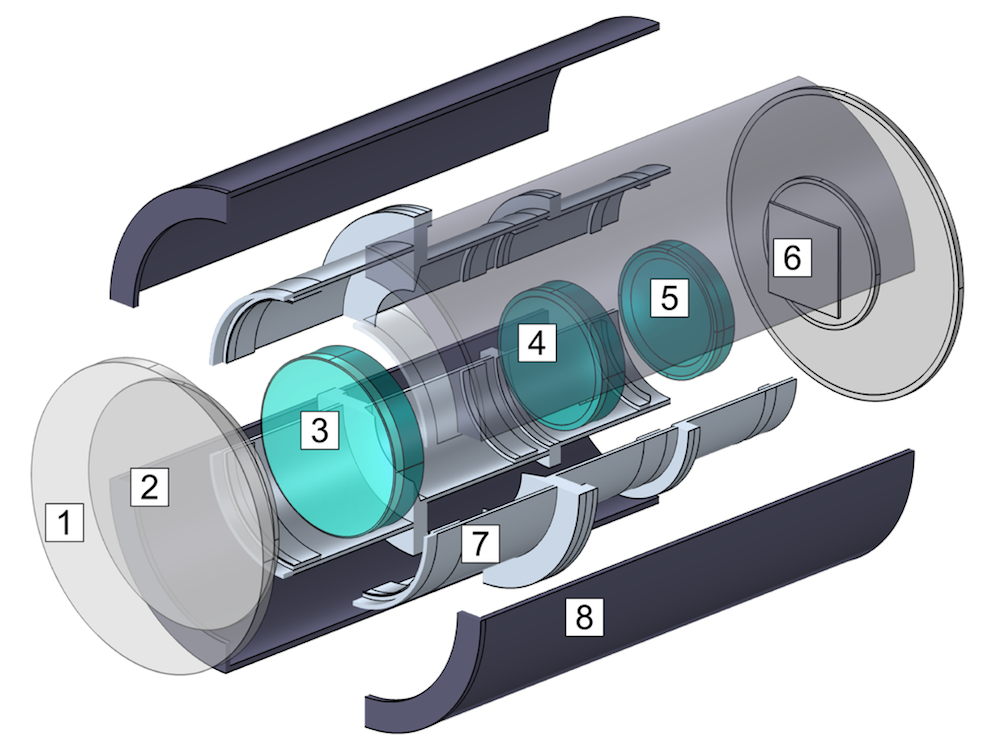
Petzval 透镜系统,镜筒和封闭式隔热罩。入射光通过最外部的真空室窗口(1)进入系统,然后通过室内的另一个透热窗口(2)进入 Petzval 透镜系统。透镜系统由两个镜头组(3 和 4)和一个平场透镜(5)组成。光线在焦平面(6)上聚焦。透镜系统由完全封闭在隔热罩(8)内的镜筒(7)支撑。
外部真空室窗口另一侧的周围环境温度为 25℃,隔热罩的壁温保持在 —50 °C。可以通过使冷却液流过隔热罩来保持此恒定温度,这里我们不详细研究此机制,而只是将壁视为固定的温度边界条件。来自真空室外温暖环境的热辐射将在透镜系统和镜筒中产生温度梯度。直观上,我们可能期望真空室窗口的温度高于透热窗口,而透热窗口的温度高于透镜组1,依此类推……但需要更多定量的信息。
在更详细地讨论该模型的设置之前,让我们先考虑一下热真空室内存在的不同物理现象。
STOP 分析:基本物理场
STOP模型涉及以下各项之间的耦合:
- 使用固体传热 接口或其他传热接口进行温度计算
- 使固体力学 接口或其他结构物理场接口进行的结构变形模拟
- 使用几何光学 接口进行射线追踪
下图总结了耦合上述三个物理场的机制。
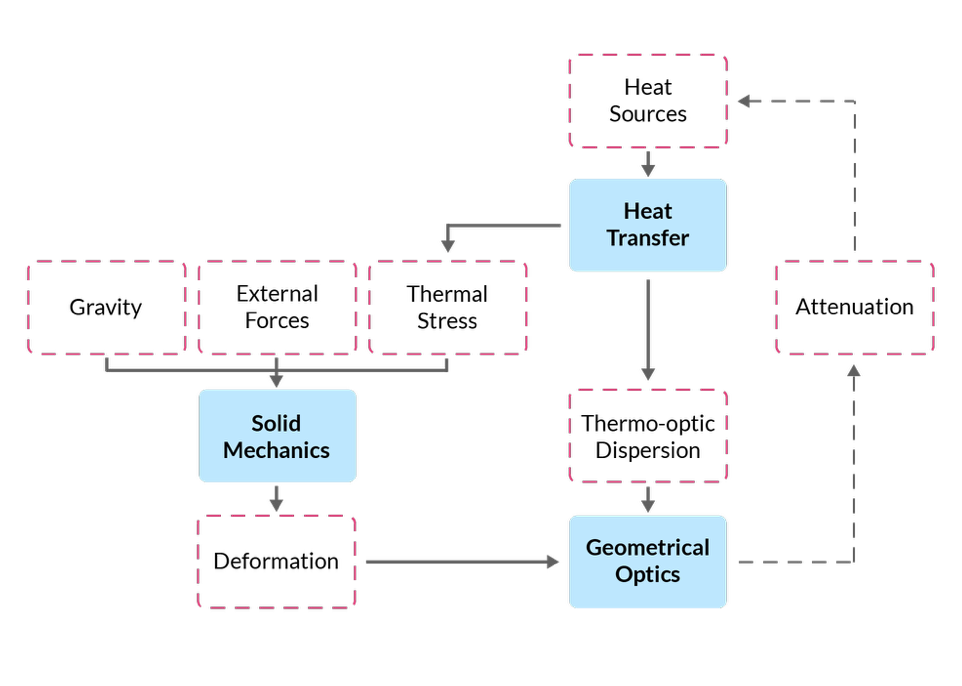
STOP 分析中最重要的多种相互耦合的物理现象。
传热仿真
温度通常受焦耳加热或化学反应等热源和热沉,以及对流或辐射热与周围环境的热交换等边界条件的影响。
射线光学器件和传热之间的双向(两种方式)耦合是一种特殊情况。当来自如激光或太阳能等强热源在模拟域中经历一定程度的衰减,产生额外的热源时,就会出现这种情况。本文讨论的示例是单向耦合,因为射线的功率不足以通过衰减产生冥想的热源项。
温度会影响光线通过热光色散介质的传播,折射率是温度的函数。温度也会间接影响射线路径,因为热应力会导致边界变形,这将在下一节讨论。
结构仿真
STOP 分析通常需要计算结构位移场。射线能与变形的几何结构相互作用,这可能会导致它们在不同的方向上被反射或折射,而不是在原始未变形的几何结构中传播。
结构位移是施加到模型几何上所有力的结果,在这种情况下,模型几何结构包括透镜系统和将其固定在适当位置的镜筒。几何结构也可能由于热应力而变形,因为温度变化会导致其膨胀或收缩。
光学色散模型
可以使用几何光学 接口跟踪反射和通过边界的折射。每种材料的折射率是波长和温度的函数。如果透镜系统变形,射线将与变形的几何结构相互作用。这时,射线路径受到温度和结构变形的影响。
在几何光学 接口的介质属性 节点,可以选择光学色散模型,通过一组方程和系数将折射率定义为真空波长(也可能是温度)的函数。
下图显示了 Sellmeier 光学色散模型的方程 。方程的前五行将折射率定义为真空波长的函数。这里,A1,B1,A2,B2,A3 和 B3 是 Sellmeier 系数,每种类型玻璃的系数都是唯一的。最后两行是热光色散模型的附加校正项。式中,D0,D1,D2,E0,ë1,λTK 是热光色散系数。
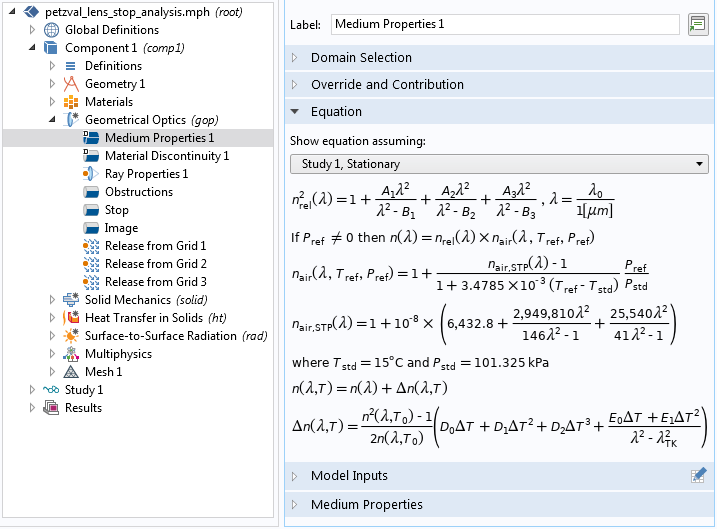
Sellmeier光学色散模型的方程。
这里有一个特殊的选择值得指出:与温度相关的 Sellmeier 色散模型将折射率的色散和热敏性用一个方程定义。这个选项常适用于玻璃承受极宽的温度范围的低温模型。
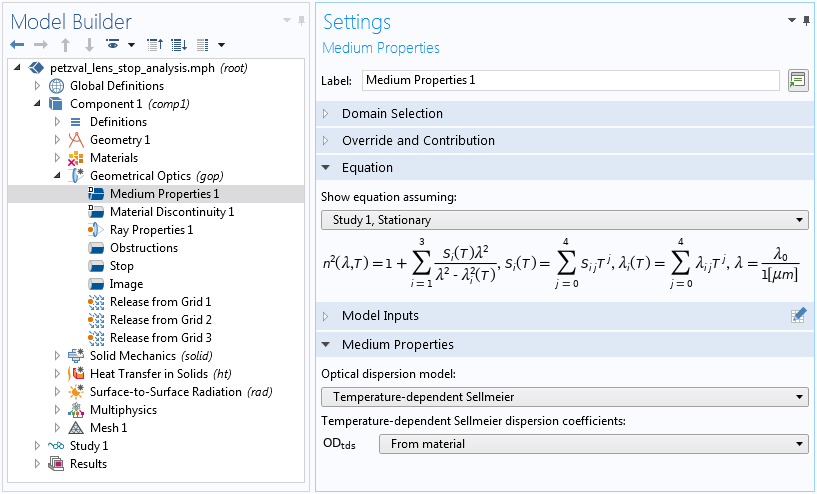
与温度相关的 Sellmeier 系数将温度和波长相关性组合为一个表达式。
通常建议从光学色散模型 列表中选择从材料中获取色散模型。然后,将根据每种材料定义的材料属性自动检测光学色散模型。通过此选项,可以使用不同制造商生产的各种玻璃来创建模型,即使它们对光学色散模型使用了不同的标准。
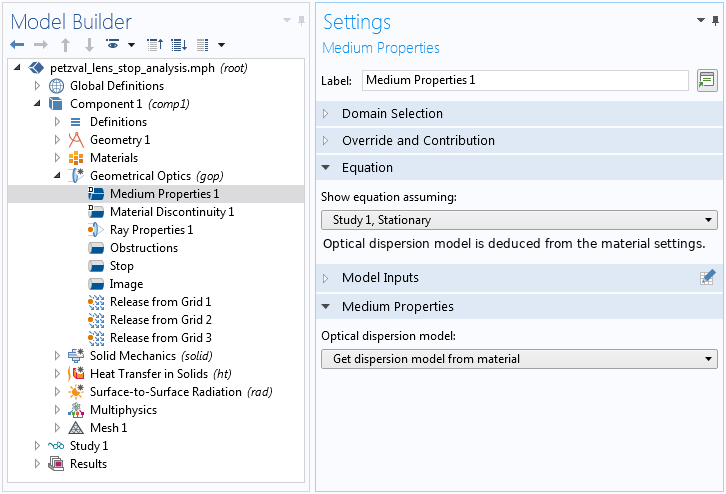
根据定义的材料属性自动检测正确的光学色散模型的选项。
对 Petzval 透镜系统进行 STOP 分析
接下来,我们以上述热真空室内的Petzval 透镜系统为例进行 STOP 分析。
使用固体传热 接口模拟传导传热,使用表面对表面辐射 接口模拟表面之间或表面与周围环境之间的辐射传热。仅将真空窗口的外表面暴露在温暖的周围环境中。使用专门的 表面对表面辐射传热 多物理场耦合节点将传导传热和辐射传热相互耦合,如下图所示。
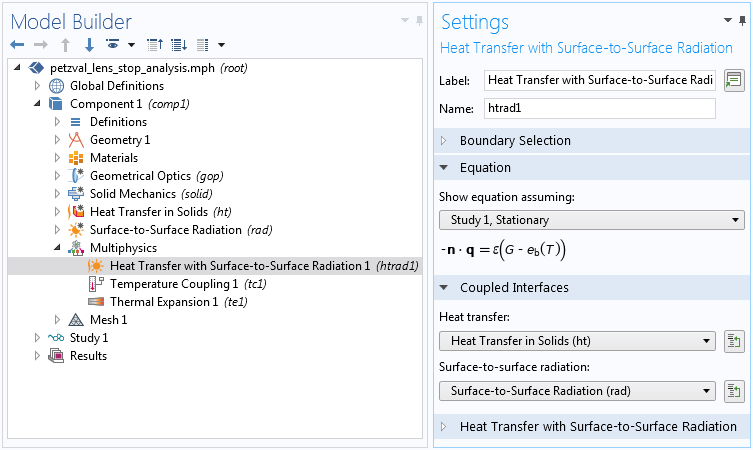
固体传热与表面对表面辐射接口之间的多物理场耦合。
表面对表面辐射 接口在所有表面(包括透镜)上使用漫反射表面 边界条件。因此,假设透镜系统在光波长下是透明的,但是在红外光下是不透明的。
透镜系统和镜筒内的温度分布如下图所示。品红色实线表示真空窗口(1),透热窗口(2),透镜组(3-4)和平场透镜(5)中心的温度。蓝色和红色虚线分别表示腔室壁(6)的固定温度和腔室外部(7)的环境温度。
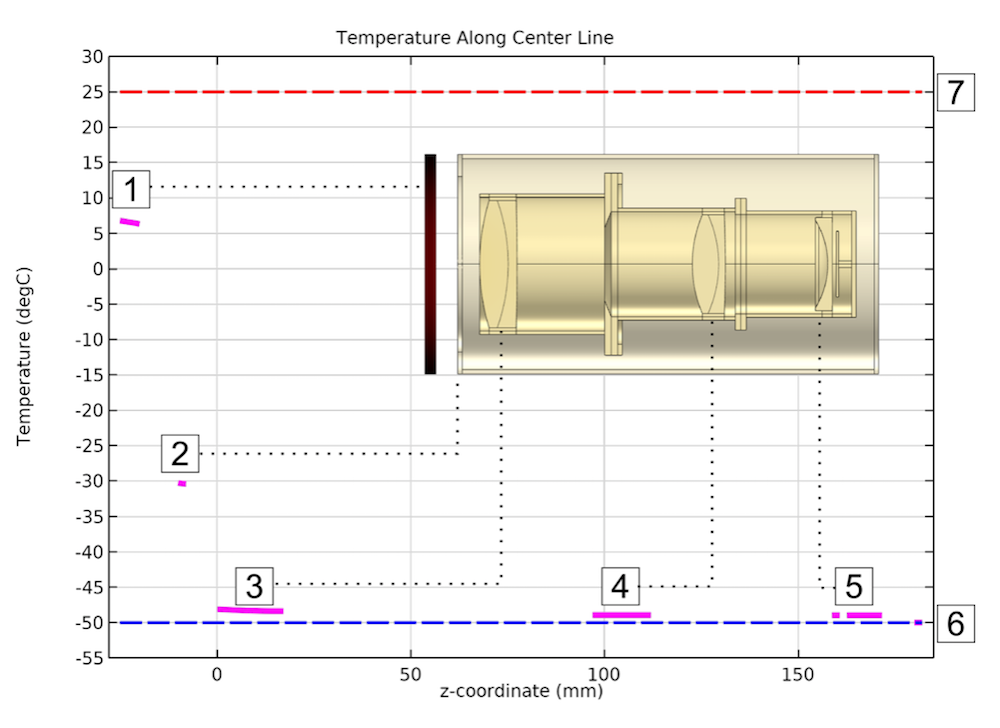
沿透镜系统、镜筒和腔室对称轴的温度分布图。
在这个模型中,结构和热之间的耦合是通过两个专用的多物理场耦合节点模拟的,如下图所示。一个节点简单地将两个接口之间的温度耦合,另一个节点则将热应力项专门添加到结构位移方程中。


左:求解物理位移场时,多物理场耦合包括热膨胀。右:固体传热与 固体力学接口的多物理场耦合。
要在追踪光线时包括热膨胀,还必须采取另个一重要的步骤。找到 射线追踪 研究步骤,并确保选中包括几何非线性 复选框。如果未选中该复选框,则射线将与未变形几何的边界相互作用,对温度的唯一影响将是热光色散模型的折射率。

用于追踪变形几何体中射线的设置,计算结构变形。
Petzval 透镜系统的射线图
射线以三个不同的时场角入射到腔室内。下图为表示透镜系统和镜筒横截面温度的射线图。
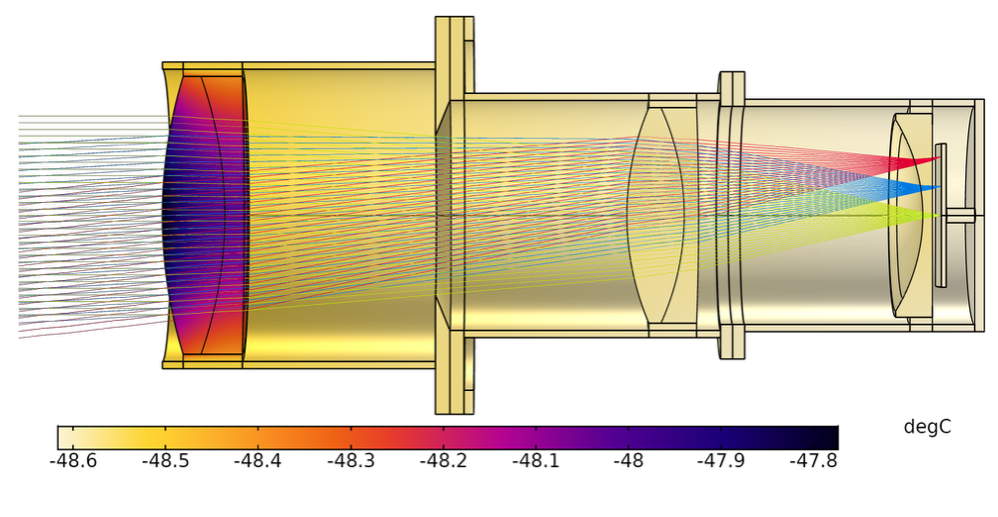
针对三个不同的视角,绘制了加热的 Petzval 透镜系统中的射线轨迹。
焦平面上的点图如下所示。看起来最对称的点图对应于零视场角,而最不对称的点图对应于最大视场角。
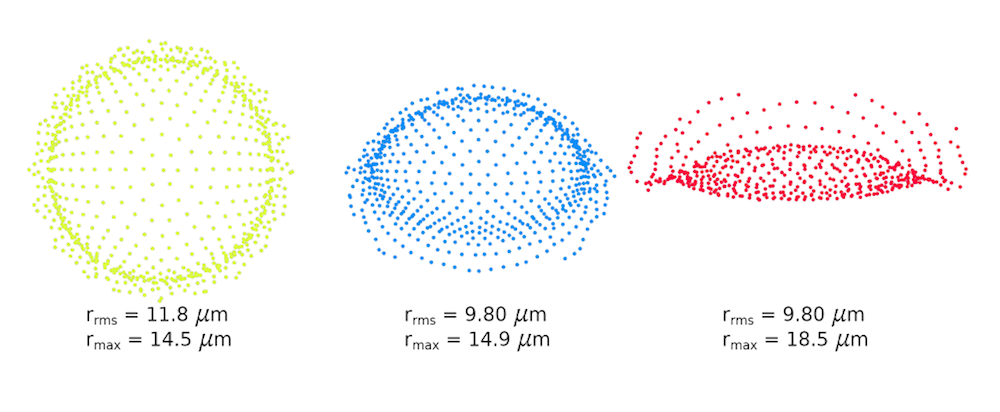
从零(左)开始的三个视场角的点列图。
为了进行比较,下图为将整个设备保持在室温(20°C)时的点列图。

透镜系统处于室温时,三个视场角的点列图。
在 COMSOL® 软件中进行 STOP 分析的结论性思考
本文我们介绍了一个对封闭在冷却真空室内的 Petzval 透镜系统进行 STOP 分析的示例。通过仿真,我们观察到了透镜中存在温度梯度,这是因为系统暴露在比真空室更温暖的环境中。另外,低温明显增加了均方根(RMS)点的大小。
通过上述的在单个模型中耦合结构、热和光学现象的方法,我们提出了一种易于使用的工作流程,可以在实际测试和操作条件下设置高保真度仿真光学系统。
单击下面的按钮,进入 COMSOL 案例库,尝试自己动手建模。您可以下载教程文档和示例模型的MPH文件。
了解更多有关透镜仿真的信息,请阅读相关博客:如何创建复杂的透镜几何结构。
姿态探测 指在三维空间中测量物体的方向和旋转,这种技术对于飞机与航天器的导航至关重要。最近的研究证实,环形激光陀螺仪和纤维环陀螺仪能够替代传统的机械陀螺仪,精确地测量旋转运动。此装置的基本工作原理是一种被称作萨格纳克效应 的光学现象。在本文中,我们将利用射线光学仿真,观察简单萨格纳克干涉器中的萨格纳克效应。
究竟是我还是房间在旋转?
任何导航系统的一项基本任务是保持追踪物体的位置和方向,以及二者的变化率。导航系统对精度的要求达到了极致,特别是太空航行领域。举例来说,通信卫星可以敏感地响应千分之一度每小时的细微角速度。
系统对精度的要求固然令人生畏,不过事实上姿态控制的基本任务可以归纳为一个简单的问题:如何确定我的旋转速度以及旋转轴?
原则上讲,对于任意旋转坐标系中的任何观测者而言,这个任务都是相同的,即便是旋转餐厅中的宾客也不例外。

印度国宾大酒店的旋转餐厅的照片,它是印度历史最悠久的旋转餐厅。该照片由 AryaSnow 拍摄,已获 CC BY-SA 4.0 授权,并通过 Wikimedia Commons 共享。
假设你坐在旋转餐厅里面就餐,现在正在推断餐厅的角速度 Ω(单位:rad/s)。
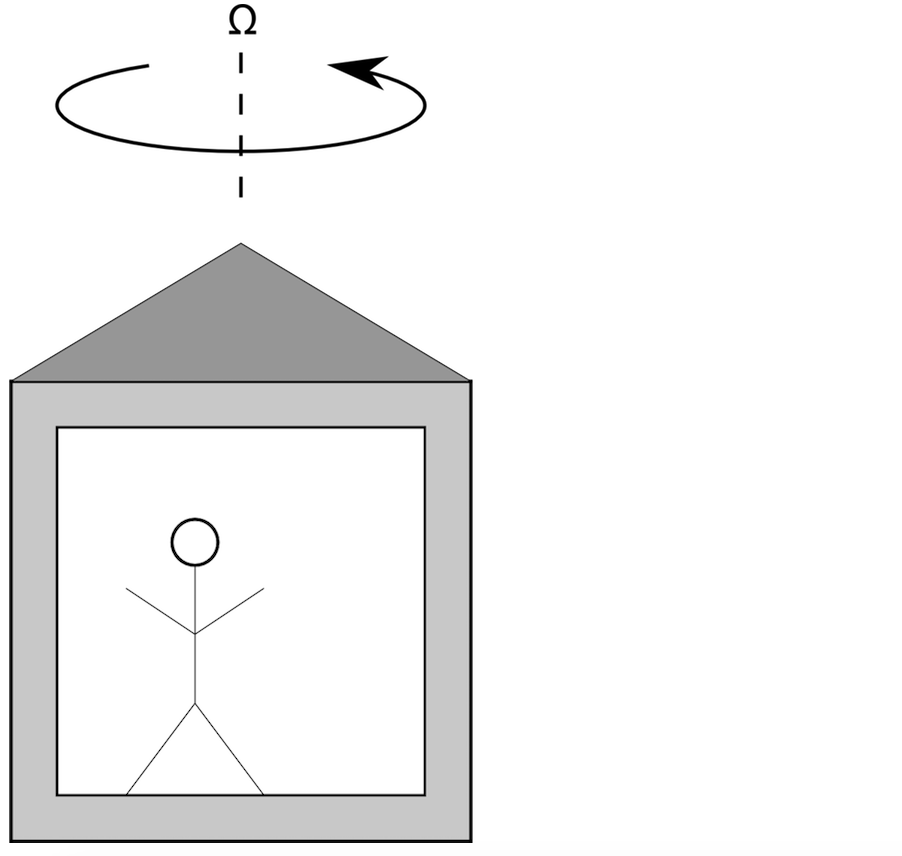
最简单的方法就是往外看。选取一个静止的目标,比如建筑物或树,然后观察在你的视野中它的位置是否会随时间变化。
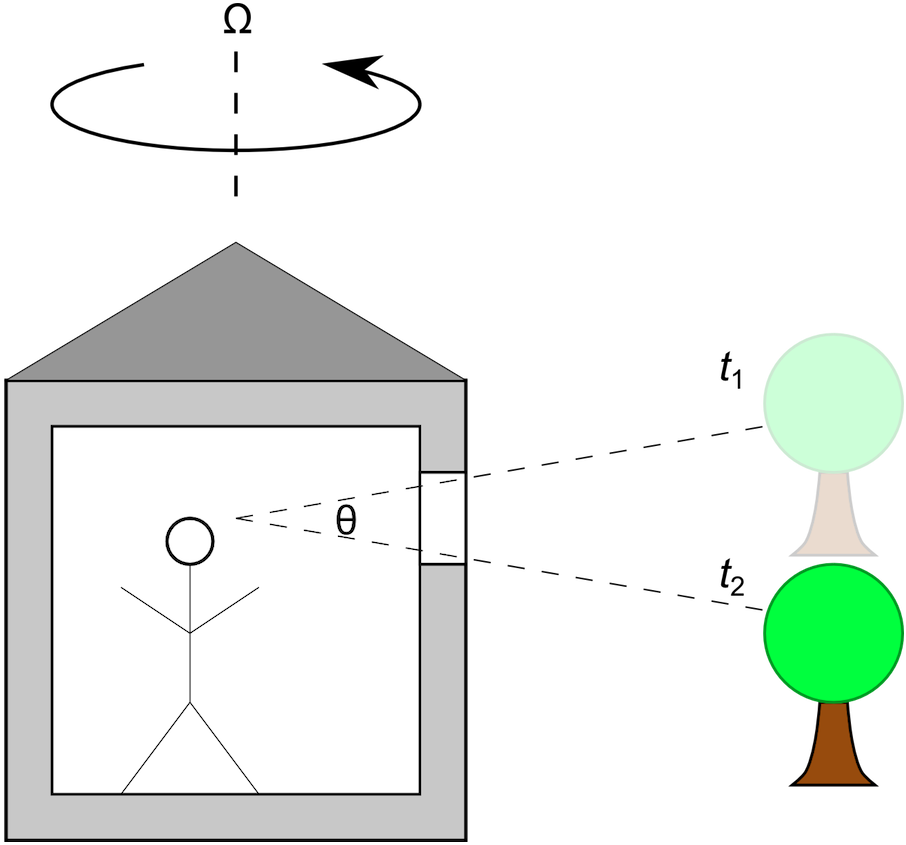
上图展示了在观察者的视野中(比如从窗户往外看),树在初始时间 t1 和时间 t2 时的位置。设两个视线之间的角度为 θ(单位:度)。如果相对于餐厅本身的大小,树的距离很远,角速度的计算公式则为
太空中的相似场景
太空航行的难度比在餐厅吃饭大得多,所以我们必须注意几个额外事项。在太空中,“静止物体”的方法比较难实现。举例来说,当我们利用太阳敏感器对地球静止轨道上的卫星进行姿态控制时,还要考虑地球绕太阳转动的相对运动。相比之下,恒星敏感器的精度极其可靠,这是因为基于各种目标前提,我们可以认为恒星在太空的位置是始终不变的,且恒星更接近于一个光点,而不是有一定角度的连续光源。
除此之外,在航天器姿态测量与控制对精度的严苛标准下,被观测物体的有限尺寸也需要考虑到,比如当你看向太阳时,要知道自己在观察太阳的哪一部分。在三维空间中实现任意旋转至少需要两个物体,否则你不能判断旋转轴的方向。
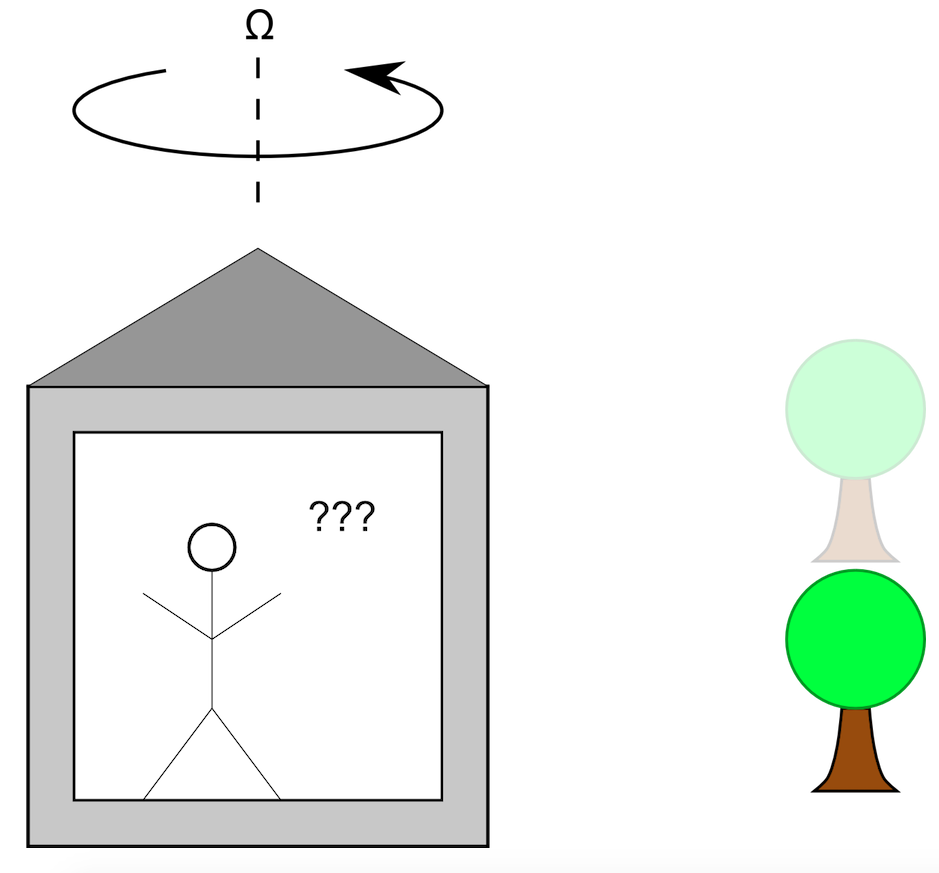
遮住视野
现在我们又回到原来的餐厅,只不过这次窗户都关上了。既然向外看的视线被遮挡住了,你不能依赖于任何物体来判断旋转坐标系。
我们可以在旋转坐标系内做几个实验来确定它的角速度。比如在地板上放一个球,观察离心力是否会使它滚动(这时你需要知道旋转轴的位置——在太空航行中可不一定行!)。另一个方法是使用机械陀螺仪。
下个章节将解释第三种方法——利用光的特性;准确地说,真空中的光在所有坐标系中拥有相同速度的特性。光在旋转坐标系中传播时,它揭示了一种被称作萨格纳克效应的现象。环形激光陀螺仪 就是利用了这种效应。这种陀螺仪广泛取代了利用高速回转体的传统机械式陀螺仪,环形激光陀螺仪舍弃了活动部件,因此维护成本更低。
解释萨格纳克效应
观察萨格纳克效应最简单的方法是:利用两束在同一个圆环中对向传播——即反向运动——的光线。圆环以恒定的角速度 Ω 逆时针旋转。(国际单位是弧度每秒,不过在惯性导航系统中,我们可以用度每秒来代替它。)
初始时,两束光线从圆环的 P0 点发射,沿圆环以光速反向传播,与此同时,发射点开始绕坐标系旋转。当沿顺时针方向传播的光线与发射点再次重合时,重合点为一个新的位置 P1,传播距离略小于一个完整的圆。当沿逆时针方向传播的光线与发射点重合时,重合点为另一个不同的位置 P2,其传播距离大于一个完整的圆。
当然,这里的运动显然被夸大了。在现实中,P0 同 P1 和 P2(以及后者之间)的位移可能小一百亿倍!但是因为两束光线的距离差伴随着相移,而相移会在两束光线之间产生干涉图案,所以两束光线的传播距离的细微差别(同理还有传播时间)还是可检测到的。若设 ΔL 为两束光线传播的距离差,则
(1)
其中,A 是圆环面积,真空光速为 c0 = 299,792,458 m/s。
事实证明,方程 (1) 不仅符合环形路径,也适用于其他形状。光程差只取决于环路的封闭面积,而不是形状。我们可以根据广义相对论推导出方程 (1) 的一般表达式。方程的核心在于,萨格纳克效应是一种相对论现象,对于这种现象,经典推导可以得到相同的一阶结果。参考文献 1–2。
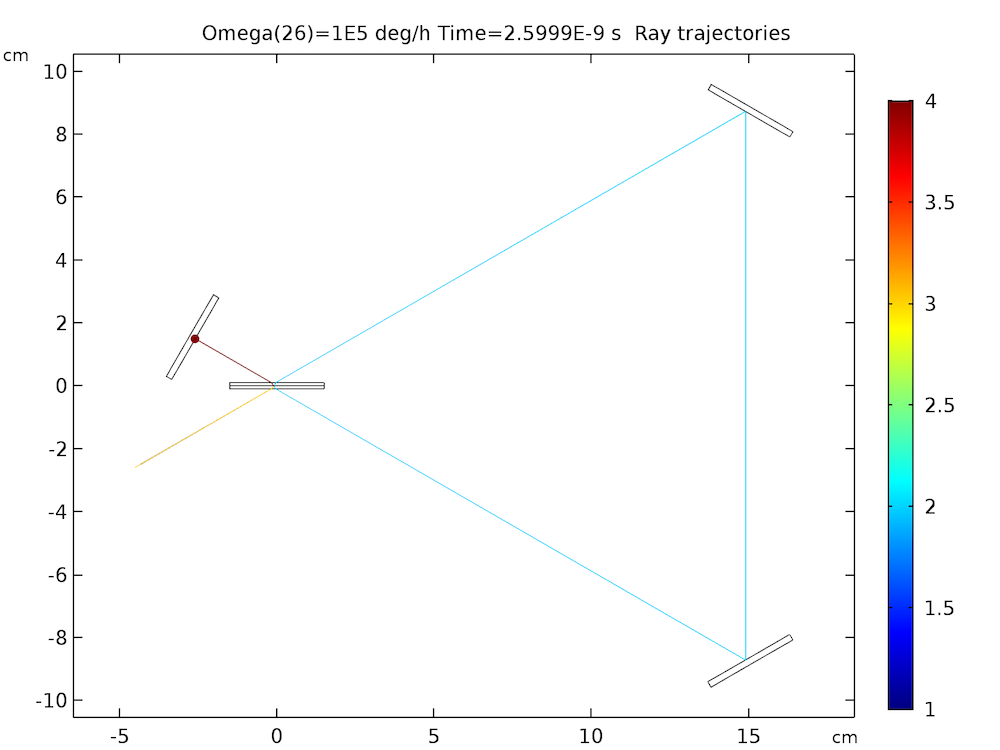
利用射线光学仿真演示萨格纳克效应
在本节中,我们将研究简单的萨格纳克干涉仪模型。它的基本工作原理与环形激光陀螺仪相同,不过前者不需要考虑光束路径上的激光介质,所以模型创建步骤更加简单。(除了强度更大之外,激光介质还会引入很多其他复杂性,比如色散效应,不过为了方便描述,我们可以忽略。)但是,对于给定的萨格纳克干涉仪模型几何与拥有相同镜子布局的环形激光干涉仪,二者会产生同样的光程差和相位延迟,所以这个模型依旧可以提供大量信息。
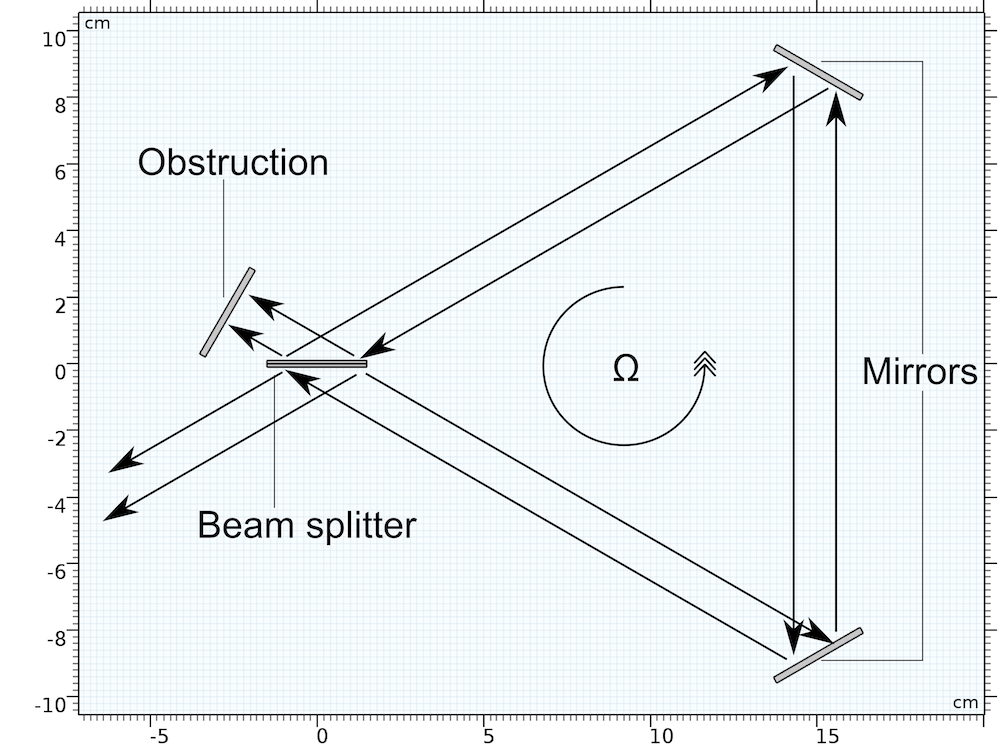
基本的萨格纳克干涉仪几何由一个分光器、两面镜子和一个可吸收射出光线的障碍物组成。图示如下。
此模型的几何参数见下表。
| 参数名称 | 公式 | 值 | 描述 |
|---|---|---|---|
| λ0 | N/A | 632.8 nm | 真空波长 |
| R | N/A | 10 cm | 圆环半径 |
| b | | 17.3 cm | 三角形边长 |
| P | | 52.0 cm | 三角形周长 |
| A | | 130 cm2 | 三角形面积 |
几何结构有时被设计成正方形,而不是三角形,这时三个镜子位于三个顶点上,分光器在另一个顶点上。系统中光线的传播路径通过方向箭头来表示。由于整个装置沿逆时针方向旋转,因此在碰到障碍物之前,沿逆时针方向发射的光线比顺时针光线的传播距离稍远一些。
为了直观演示这一现象,请观看下方动画(请注意,旋转运动又被夸大了一百亿倍!)。
在左侧动画中,观察者站在惯性(非加速)坐标系中。虽然光线的传播路径都是直线,但是它们撞击镜子的时间却不一样。在右侧动画中,观察者“乘坐”着宇宙飞船,可视为身处非惯性坐标系中(严格来说,即使在旋转坐标系中,对向传播的光线的运动速度也相同;任何坐标系中光速均不变!)。
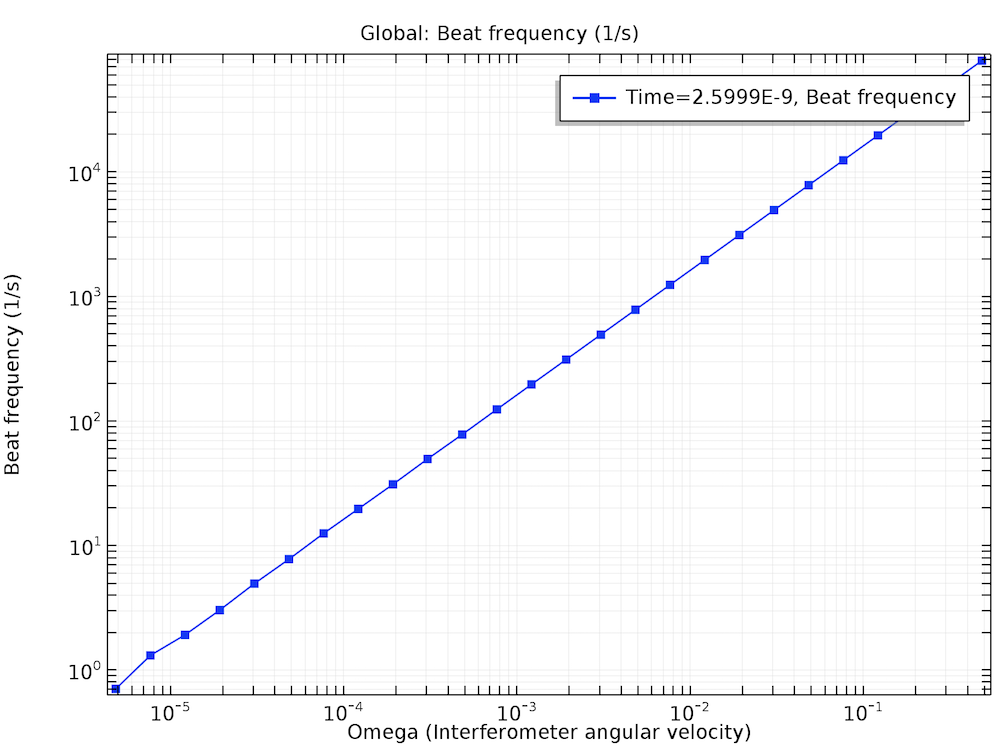
代入上文给出的几何结构参数,方程 (1) 计算出两束对向传播光线之间的光程差为 8 × 10-16 米,即 0.8 飞米,约等于质子的半径;这个数值显然很难测量!萨格纳克干涉仪和环形激光陀螺仪通常不会直接给出光程长,而是报告频率差或者拍频 Δν,其公式为:
(2)
其中 ν(Hz)是光的频率,L 是沿三角形周长传播的光的光程长度。
注意,L 不一定是三角形的周长,因为系统中可能存在共用运动的介质,比如沿光束路径、折射率不等于 1(n ≠ 1)的激光介质。在本例中,假设镜子和分光器之间为真空空间。则拍频的数量级为 1 Hz,当然比质子半径的距离容易测量得多。
该模型利用几何光学 接口来追踪萨格纳克干涉仪几何中的光线。两个镜子被施加了专门产生镜面反射的镜像 边界条件。分光器采用了材料不连续性 边界条件,用户定义的反射比为 0.5,所以两个对向传播光束具有相同的强度。
我们还利用了旋转域 特征使装置旋转,如下图所示:

所得绘图显示了镜面光学系统中沿两个方向传播的光线,然而由于与光速相比,镜子的移动速度非常慢,所以我们很难将两个路径区分开。如果放大一百亿左右,才能辨别出两个隔着微小距离的三角形。
在下方绘图中,拍频是干涉仪角速度的函数。二者函数关系是线性的,符合方程 (1)–(2)。绘图左下角出现了一些数值噪声。这是数值精度造成的,在模型文档中将解释更多细节。
姿态探测应用于航空航天导航
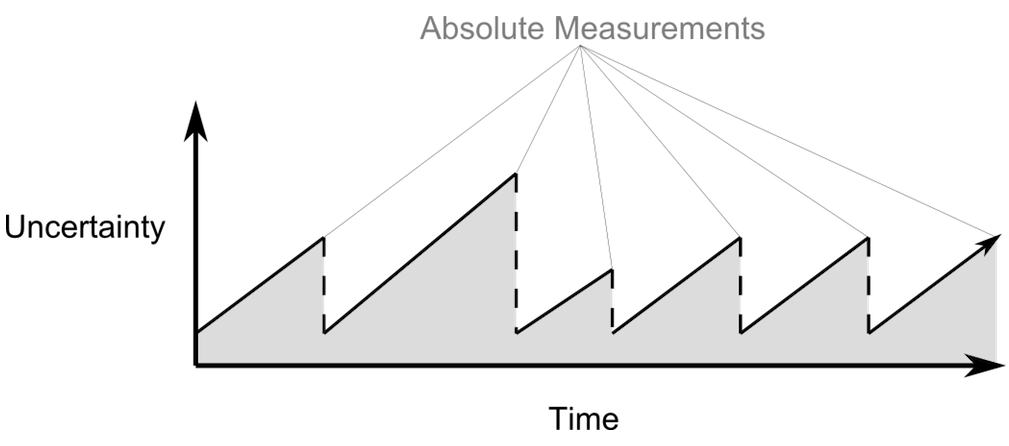
上文提到的萨格纳克干涉仪和相关装置——包括环形激光陀螺仪和光纤陀螺仪——都属于惯性导航系统的现实应用;惯性导航系统以一个已知位置为起点,将平移速度和角速度随时间的变化整合在一起,从而预测物体的位置和方向。现实中,惯性导航系统通常需要与以太空中其他物体为参照物的绝对位置和绝对方向测量相结合。绝对测量可以利用地球敏感器、太阳敏感器或恒星敏感器;利用地球表面已知位置上的射频信标;利用地球磁场测量;或者利用以上任意组合来完成。
平移速度和角速度的微小测量误差会导致惯性导航系统随时间推移变得越来越不稳定。使用以上任意一种敏感器定期进行绝对测量,有利于将不确定性限制在一个更合理的数值内。下图预测了不确定性随时间的变化。
结论
我们成功地利用射线光学仿真演示了简单干涉仪内的萨格纳克效应。只要所有活动部件的速度远远小于光速,拍频便符合基于广义相对论的严密理论。萨格纳克干涉仪或环形激光陀螺仪之内的光程差的大小仅仅取决于对向传播光束所围住的面积,而非圆环的几何结构。
下一步操作
点击下方按钮,探索萨格纳克干涉仪模型。在“案例下载”页面中登录 COMSOL 账号登录,即可下载 MPH 文件(需要有效的软件许可证)及模型教程。
参考文献
- Post, Evert J. “Sagnac effect”, Reviews of Modern Physics, 39, no. 2, p. 475, 1967.
- Chow, W.W. et al. “The ring laser gyro”, Reviews of Modern Physics, 57, no. 1, p. 61, 1985.
在本系列的上一篇博客文章中,我们阐释了在为真实带电粒子束的释放和传播建模过程时,需要考虑的两个必要概念。首先,我们引入了纯数学意义上的概率分布函数,然后探讨了一种特定的分布类型——二维带电粒子束的横向相空间分布。在本篇文章中,让我们结合所学知识,探究如何对这一类分布中的三维粒子束的初始位置和速度进行取样。
回顾椭圆形二维相空间分布
在开始本篇文章前,首先我们来简单地回顾一下在束流物理中的相空间分布系列的上一篇博客文章中,详细介绍过的二维相空间分布。在真实环境中,非层带电粒子束中的粒子占据了相空间的一部分区域,且该区域通常呈椭圆形。二维相空间椭圆的方程式基于束流发射度 ε 和 Twiss 参数,
(1)
其中,x 及 x’ 分别表示粒子的横向位置和倾角。Twis 参数进一步构成了 Courant-Snyder 条件,
(2)
椭圆区域中粒子的实际位置是可以改变的。两种最常见的相空间密度分布是椭圆内的均匀密度分布与最大值位于椭圆中心处的高斯分布,如下图所示。左右两侧的蓝色曲线均为由方程(1) 描述的相空间椭圆,其中 ε 表示 4-rms 横向发射度。值得注意的是,对高斯分布而言,仍然有一些粒子游离于椭圆之外。这是因为高斯分布始终没有下降为零,所以无论绘制的椭圆有多大,总会有一些粒子位于椭圆之外。当使用 4-rms 发射度来定义方程(1)中的椭圆时,则大约有 86% 的粒子位于椭圆之内。
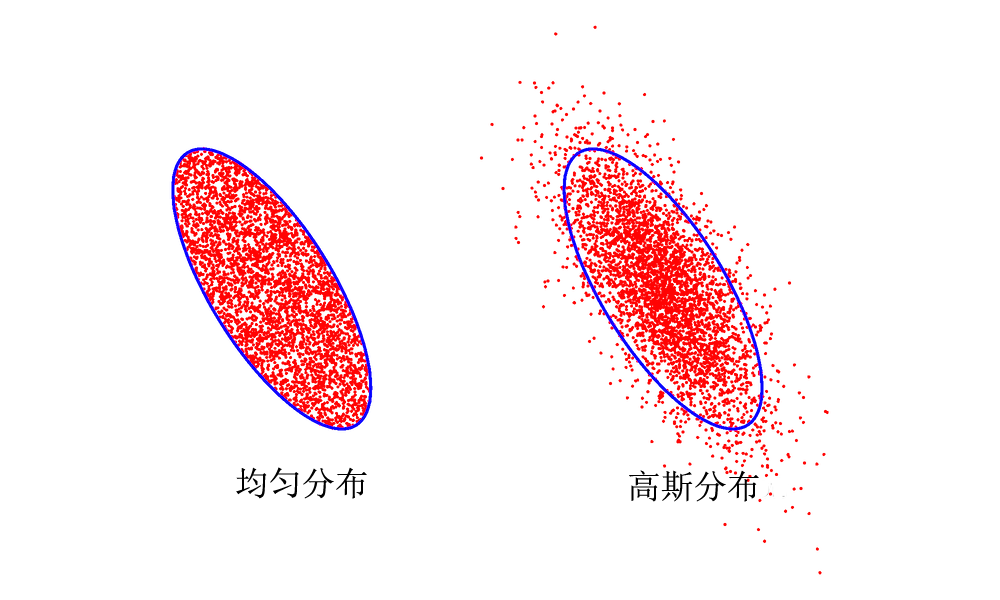
对比均匀分布与高斯分布。
让我们先来考虑一种更简单的情况:在相空间椭圆内的任意一点找到粒子的概率是相同的,而在椭圆外为零。对于这个问题,我们将方程(2)带入方程(1)并求解 x’ 的值
(3)
随后可推出以下概率分布函数
(4)
\begin{array}{cc}
C & -\frac{\alpha x}{\beta} -\frac{\sqrt{\varepsilon \beta -x^2}}{\beta} \textless x' \textless -\frac{\alpha x}{\beta} + \frac{\sqrt{\varepsilon \beta -x^2}}{\beta}\\
0 & \textrm{otherwise}
\end{array}\right.
其中,常数 C 取决于椭圆的大小。粒子概率 g(x) 在给定的 x 坐标下可以表示为
若要将方程(3)取实值的位置也纳入考虑,我们可以将方程写为
\begin{array}{cc}
2C \frac{\sqrt{\varepsilon \beta -x^2}}{\beta} & -\sqrt{\varepsilon \beta} \textless x \textless \sqrt{\varepsilon \beta}\\
0 & \textrm{otherwise}
\end{array}\right.
或将其简化为,
(5)
假设我们要用方程(4)中的概率分布函数来对一群模型粒子进行取样。具体的步骤是:首先根据方程(5)对粒子的初始横向位置进行取样,随后指定适当的倾角,将粒子限制在相空间椭圆内。一种实现方式是从方程(5)开始计算累积分布函数,然后再使用伪随机抽样的方法。另一种可取的途径是利用方程(5)来定义粒子密度,这时我们可以直接在粒子追踪接口的入口 和释放 特征中输入粒子密度表达式。输入完成后,系统便会自动完成归一化。
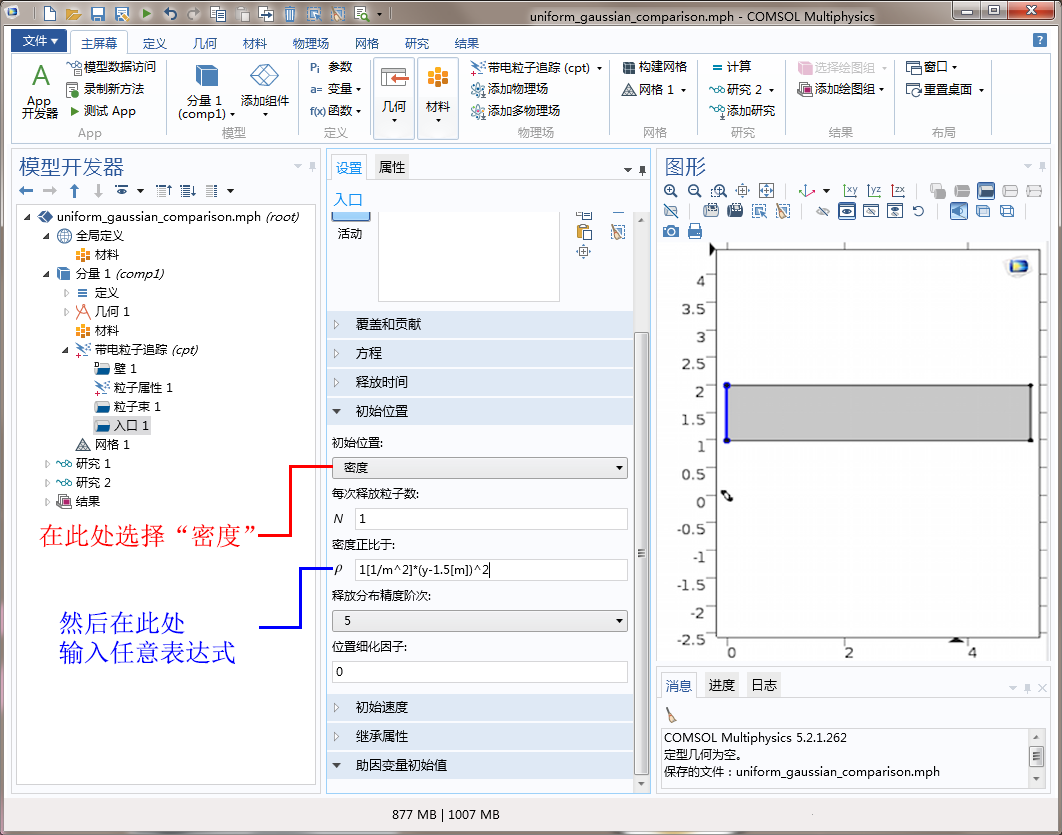
截图显示了如何在“入口”特征中输入粒子密度。
不过,最简便的方法是使用带电粒子追踪 物理场接口中的粒子束 特征。“粒子束”特征可以自动分配相空间中的粒子,同时还能指定粒子束的中心位置、发射度以及 Twiss 参数。
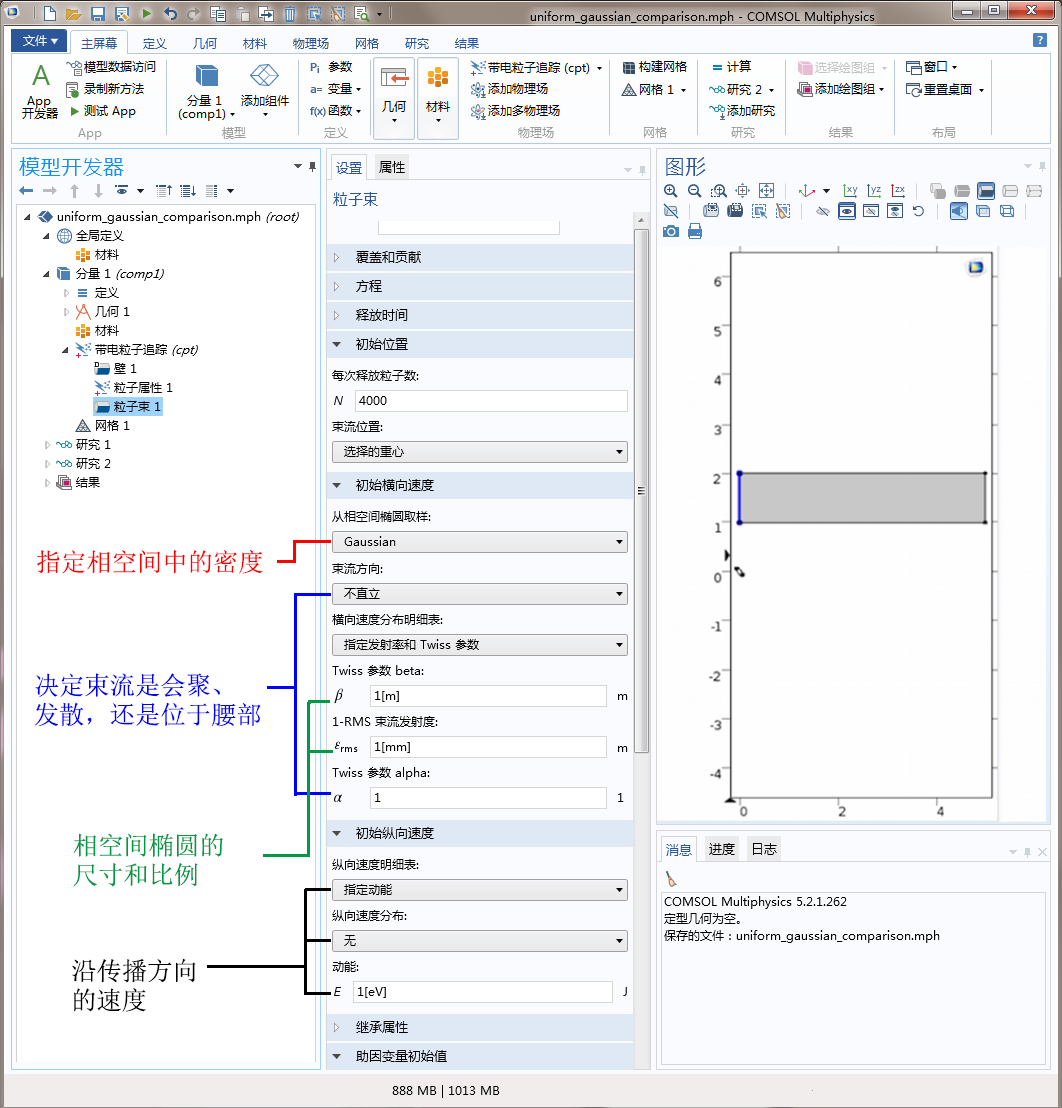
截图显示了如何在“粒子束”特征中输入粒子密度。
模拟三维带电粒子束
到目前为止,我们只对理想化的带状电子束进行了探讨,而忽略了横向位置和速度的面外(y)分量。真正的光束是在三维空间内传播的,并且在两个横向方向上仅延伸了有限的距离。因此,为了绘制完整的束流图像,我们必须引入两个相互正交的横向方向 x 和 y,以及倾角 和
。
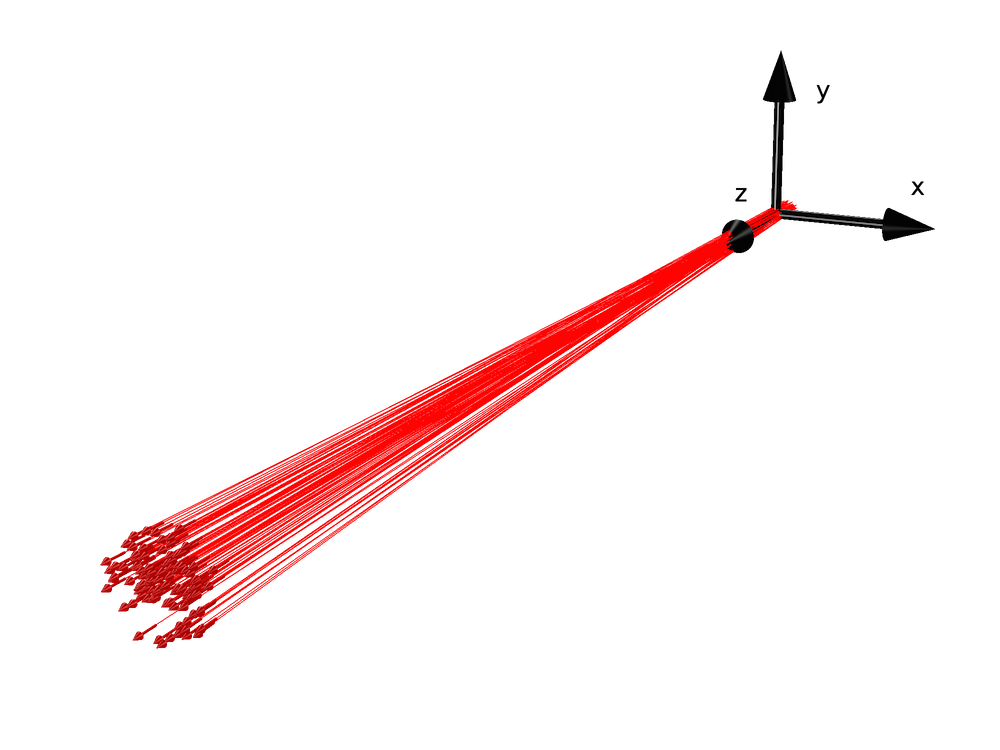
粒子束在三维空间内的传播图像。
相比于二维空间,在三维空间中模拟离子束的释放更加复杂,这是因为在真实的光束中,两个横向方向上的自由度经常会发生耦合。举例来说,假设两个粒子在同一个横向位置上被释放,即 x 坐标和 y 坐标相同。若两个粒子在 x 方向(x’)上的倾角存在大小之分,那么在 x 方向上倾角较大的粒子在 y 方向上的倾角会较小,反之亦然。因此,我们不能只从两个不同的分布中对 x’ 和 y’ 进行取样,因为每个值都会影响另一个值的概率分布。
简而言之,这是因为粒子的横向运动实际上在四维相空间分布中才能进行准确的描述,而不是将两个横向方向当作独立的二维相空间椭圆。由于习惯于在二维或三维空间中观察物体,我们很难呈现出超过三个空间维度的分布情况。
这一点正是“粒子束”特征的最大优势,其设置可专用于对各种内置四维横向空间分布的初始粒子位置和倾角进行取样。常见的四维空间分布包括 KV(Kapchinskij-Vladimirskij)分布、水袋分布、抛物型分布及高斯分布。首先,我们来讨论最简单的分布 KV 分布,然后对这一组中的其他分布类型进行可视化。
在数学上,KV 分布认为束粒子均匀地分布在相空间内的一个无限薄的四维超椭圆体上,其表达式为
+\left(\frac{r_x x' -r'_x x}{\varepsilon_x} \right)^2
+\left(\frac{y}{r_y} \right)^2
+\left(\frac{r_y y' -r'_y y}{\varepsilon_y} \right)^2 = 1
其中,rx 和 ry 为波束在 x 和 y 方向上的最大值,εx 和 εy 为与两个横向有关的发射度,r’x 和 r’y 为束包络边缘的倾角。
由于四维概率分布函数的可视化比低纬度函数更复杂,通常我们将其投影到较低维度就可以直接实现分布的可视化。KV 分布的一个有趣特性就是,其在任何二维平面内的投影都是一个是均匀密度的椭圆。其在六个平面的投影如下图所示。四维超椭圆体在 x-x’ 及 y-y’ 平面内的投影是倾斜的,因为非零值已指定为每个横向的 Twiss 参数。
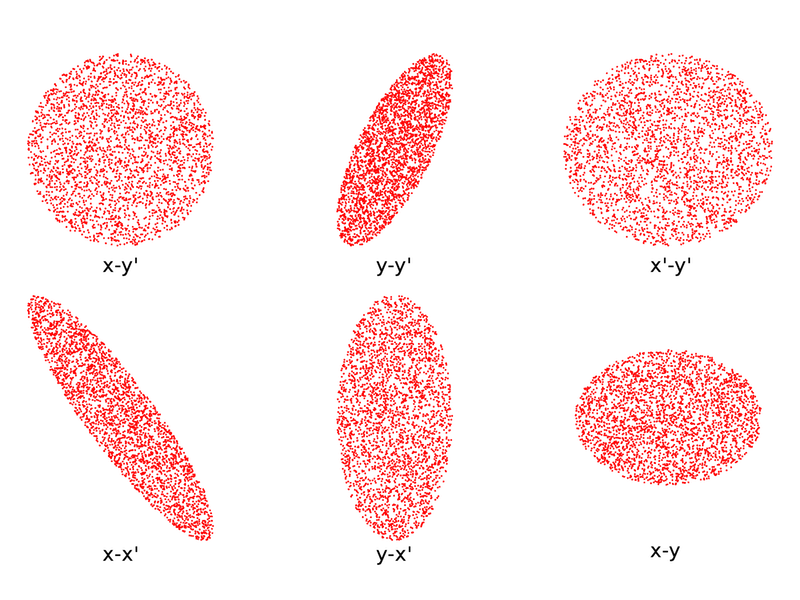
六个二维平面内的 KV 分布投影。
对比上方和下方的两组图。



六个二维平面内的水袋分布、抛物线分布及高斯分布的投影。
从上图中我们可以看到,任意情况下二维平面内的投影都是一个椭圆形分布,但只有 KV 分布中的椭圆被均匀填充。
带电粒子束建模总结
有关带电粒子束建模的系列博客到这里就全部结束了,然而我们到目前为止讨论的,仅是束流物理这一复杂技术领域的一些皮毛。当我们讨论三维横向相空间分布时,未涉及到纵向发射度或与此相关的聚束现象。我们也并未区分讨论在束流传播过程中,可能导致其发射度增加、减少或保持不变的现象。
本系列博客文章旨在介绍如何从概率分布函数中进行随机或伪随机取样,以及这种方法对于捕捉真实的高能离子或电子束所起的重要作用。如您想更加深入地了解束流物理学,参考文献 1~3 有将对您大有脾益。如需获取更多关于上文中讨论的四维横向相空间分布的技术细节(包括从这些分布获取伪随机数量取样的算法),您可以参阅参考文献 4~7. 如需深入了解如何在 COMSOL Multiphysics® 软件中应用这些概念,您可以浏览以下资源或联系我们获取相关指导。
查看有关粒子追踪仿真的其他资源
- 查看束流物理中的相空间分布系列的其他博客文章
- 浏览粒子追踪分类中的其他博客文章
参考文献
- Humphries, Stanley. Principles of charged particle acceleration. Courier Corporation, 2013.
- Humphries, Stanley. Charged particle beams. Courier Corporation, 2013.
- Davidson, Ronald C., and Hong Qin. Physics of intense charged particle beams in high energy accelerators. Imperial college press, 2001.
- Lund, Steven M., Takashi Kikuchi, and Ronald C. Davidson. “Generation of initial Vlasov distributions for simulation of charged particle beams with high space-charge intensity.” Physical Review Special Topics — Accelerators and Beams, vol. 12, N/A, November 19, 2009, pp. 114801 12, no. UCRL-JRNL-229998 (2007).
- Lund, Steven M., Takashi Kikuchi, and Ronald C. Davidson. “Generation of initial kinetic distributions for simulation of long-pulse charged particle beams with high space-charge intensity.” Physical Review Special Topics — Accelerators and Beams, 12, no. 11 (2009): 114801.
- Batygin, Y. K. “Particle distribution generator in 4D phase space.” Computational Accelerator Physics, vol. 297, no. 1, pp. 419-426. AIP Publishing, 1993.
- Batygin, Y. K. “Particle-in-cell code BEAMPATH for beam dynamics simulations in linear accelerators and beamlines.” Nuclear Instruments and Methods in Physics Research. Section A: Accelerators, Spectrometers, Detectors and Associated Equipment 539, no. 3 (2005): 455-489.
在“束流物理中的相空间分布”系列博客中,我们介绍了概率分布函数(probability distribution function,简称 PDF)的含义,以及 COMSOL Multiphysics® 软件中的多种取样的方法。若要探究离子束和电子束是如何在真实环境中传播的,那么有关 PDF 的专业知识是必不可少的。在本篇文章中,我们将重点探讨相空间 和发射度 的概念,以及如何利用他们来描述束流离子或电子的释放问题。
离子束和电子束
离子或电子束 指的是动能几乎相同、沿近似同一方向运动的粒子组成的集群。通常情况下,每个粒子的总动能比常温下粒子的热能大得多,因此粒子束拥有极佳的方向性。
首先我们来观察带电粒子束的二维图像。我们用 z 轴正方向表示束流传播方向(轴向),用 x 轴表示与传播方向垂直的方向(横向)。虽然一开始您或许会觉得这种表示方式十分奇怪,但是请记住,我们最终的讨论目的是三维束流,到时候您就会发现用 x 和 y 轴表示两个横向方向将会带来很大的方便。
如上文所述,束流的特点在于它是由大量运动方向和能量都近似相同的粒子组成的集群——然而这里的重点正是“近似”!现实中任何束流中的粒子都不可能具有完全相同的速度。事实上,与束流的释放和传播相关的数学问题基本上都涉及到了束流粒子位置和速度的微小变化。
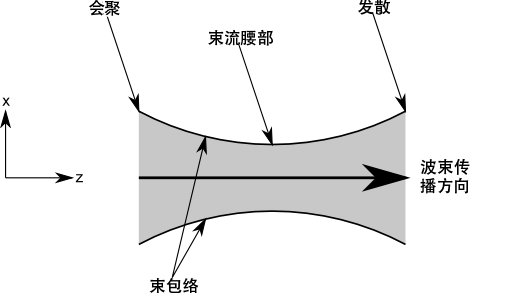
我们可以借助束包络 来表征束流形状,束包络指的是束流粒子的最外层,它能让我们了解束流的形状。如果束流存在一个锐减——即束流粒子的数密度在确定的位置上骤降为零——那么束包络或许只是一个曲线或包含所有粒子轨迹的表面。然而更常见的情况是,束流粒子的密度会在一个较大的距离内逐渐下降,因此束流终点和周围的空白空间并没有明确的界限。在这种情况下,束包络可以被定义为包含绝大部分发射粒子数的曲线或表面,通常包含 95% 左右。若束流的包络在传播方向上会逐渐变小,则此束流为会聚 束流;若包络随着束流的传播而变大,则为发散 束流。束流腰部 指的是束流刚刚结束会聚并即将开始发散时的位置。我们将在下文中对此进行详细介绍。
比较层束流和非层束流
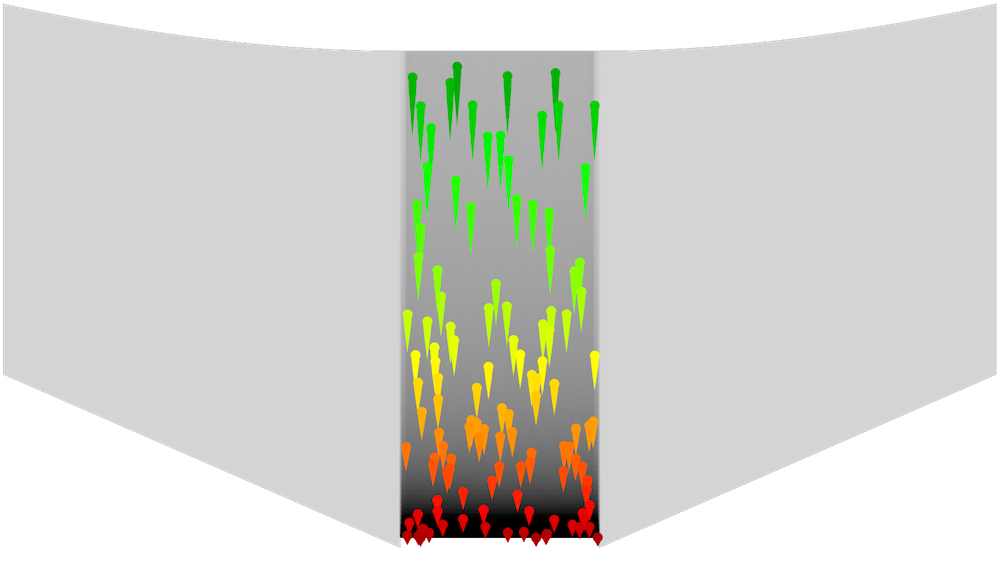
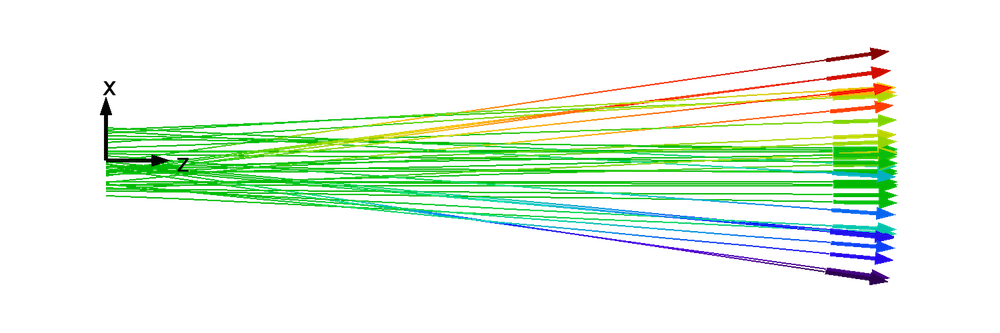
下图为一个简单的二维电子束,并描绘了其中具有代表性的粒子轨迹,模型暂时忽略了空间电荷效应及外力。坐标轴上添加了标签,以便指示轴向和横向。我们将它看成一个理想的带状电子束——也就是说,电子束在面外(y)方向上无限延伸。这些线指示了束流电子的路径,末端箭头表示各自的速度。每条线上的颜色表示电子在 x 坐标轴(或者说横向位置)上的变化,也称为横向位移。
请注意,我们选定原点是为了使 x 轴的起始端位于电子束的中心。同时将中心线或标称轨迹 上的某一点作为起点,这会让横向粒子位置的测量变得十分容易。横向位置的变化率即横向速度 vx。
从上图和后文的图片中我们可以看出,横向位移和横向速度相当夸张,十分容易观察到。但实际上,与沿电子束轴线的位移和速度相比,它们往往显得极其渺小。
由于具有下列属性,上图中的电子束被称为层束流:
- 横向位置和速度之间存在一一对应的关系。在任意的横向位置上,电子束粒子的路径不会发生交叉。唯一的例外是会聚电子束,此类束流的全部粒子将交汇于同一点。
- 横向位置和速度的比例关系是呈线性的。
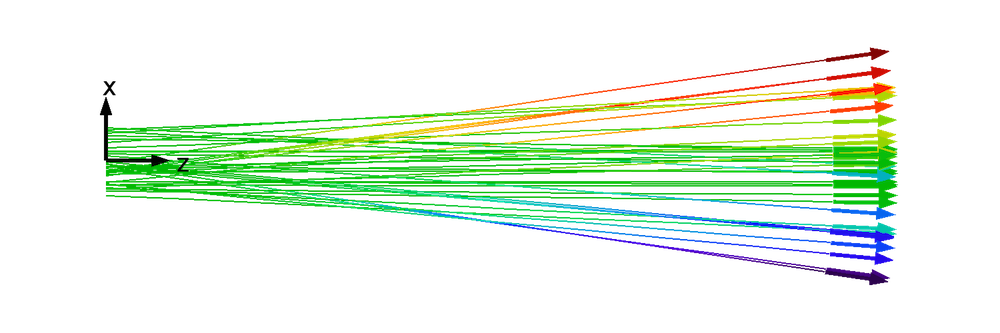
第二个属性具有重要的意义,因为它保证了之后的过程不会被违背初始属性。在下方图示中,会聚电子束的横向位置和速度之间为平方关系,而非线性关系。初始时(z = 0)粒子轨迹无相交,但在后来某一点上发生了交叉。在图表中的任意一个交点上,一个横向位置可能对应着多个横向速度值,这与第一条属性是相悖的。
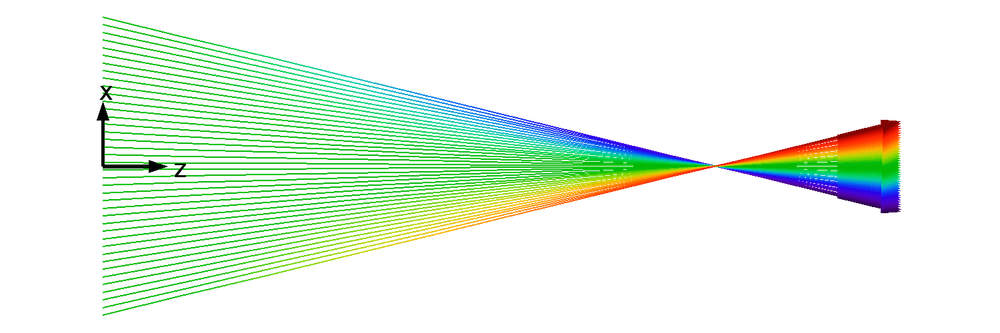
如下图所示,对于层流束而言,除非束流是会聚束流(所有轨迹相交于同一点),否则层束流的粒子永远也不会发生碰撞。
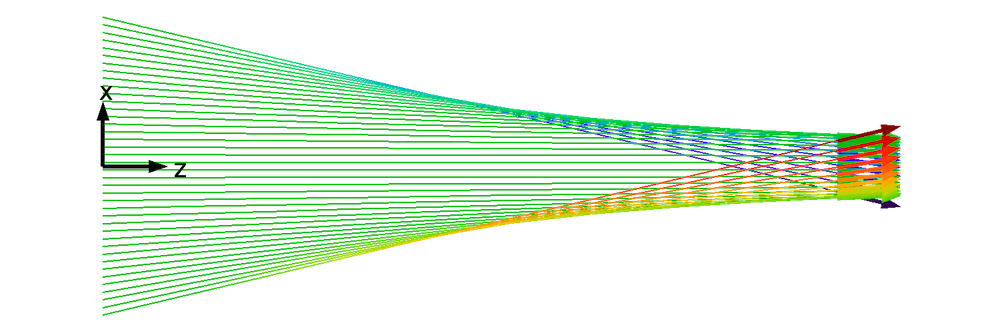
在真实环境中,任意一个横向位置都会存在具有横向速度的粒子分布,并且粒子轨迹之间会不断相互交叉,所以真实的粒子束均为非层束流,上文讨论的层束流只是一种理想情况。下图显示了一种更贴近现实的非层束流的横向速度分布情况。
接下来,为了更好地理解层束流和非层束流之间的差异,我们来观察一下二者的相空间分布。相空间分布具有多种形式,不过在本文中,我们只需要将粒子作为二维空间中的分布的点来进行研究,其中两条坐标轴分别表示横向位置和速度。当然,我们也可以将位置和动量用作坐标轴,这样做虽然会影响分布区域,但不会从根本上改变其形状。借助相图 绘图类型,我们可以很方便地在 COMSOL Multiphysics 中绘制上述的相空间分布状况。
首先,让我们观察一下层束流的相图。下图显示了时间 t = 0 时,一条释放边界上的分布情况。
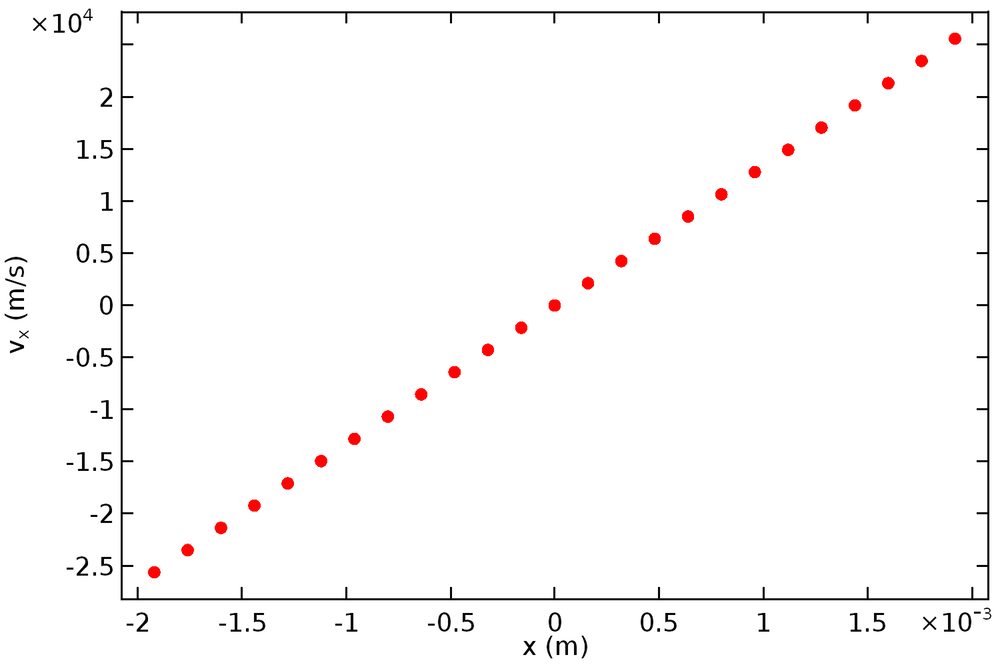
正如我们所料,边界上的点形成了一条穿过原点的直线。(请记住,按照定义,层束流中粒子的横向位置和速度之间存在一种线性关系。)下图为非层束流的相图。
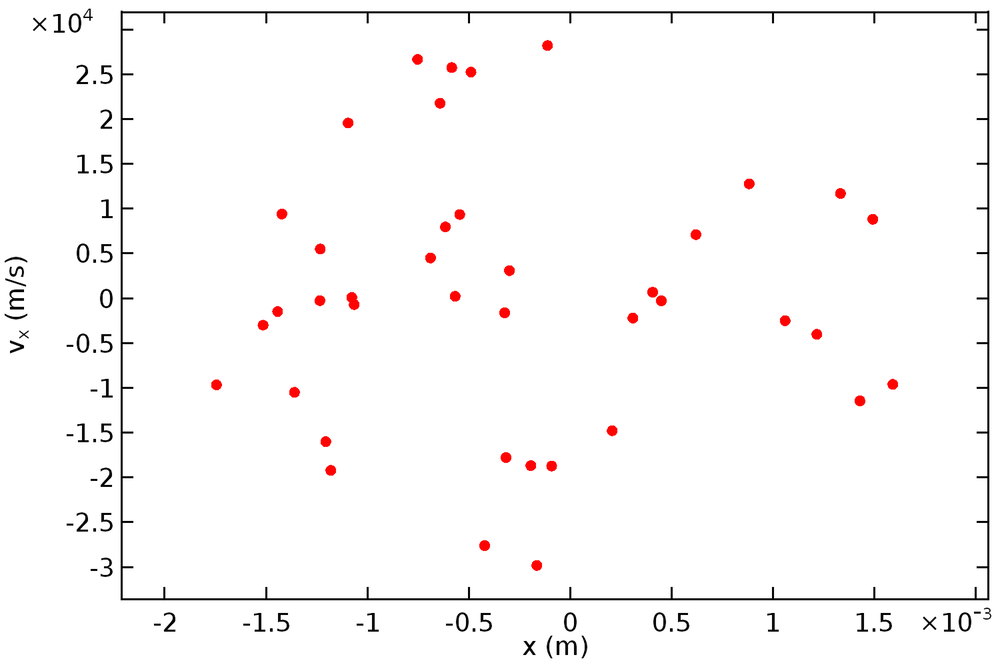
这些点不再位于同一条直线上,而是在以原点为中心的相空间中形成了一片边界模糊不清的云。这些点看似分布随机,位置并不存在任何明显的位置关联。为了更加清楚地了解相位空间分布,我们将此电子束的样本量大幅扩充到了 1000 颗粒子。
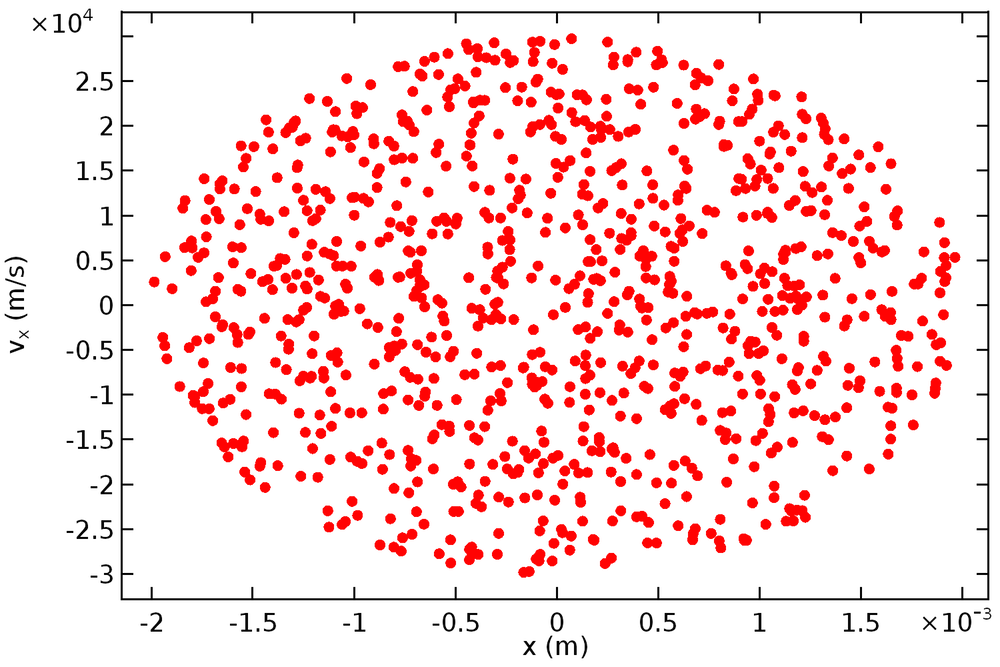
现在,我们得到了一张更加清晰的图像:粒子形成了一个相空间椭圆。椭圆中心的粒子最为密集,这说明与靠近束包络边缘的粒子相比,靠近电子束轴线的粒子速度分布范围更广。在束流物理中,这一类椭圆形的分布极其常见,不过在其他情况中,椭圆的比例和取向会发生变化,粒子具体位置也会相应地改变。与束包络的描述一样,相空间椭圆的数密度要么存在一个锐减,要么逐渐下降。在后一种情况中,我们可以对椭圆进行定义,使其包含特定比例的束流粒子,例如 95%。
在真实环境中,多数带电粒子束为近轴,这意味着与纵向速度相比,横向的速度分量非常小。在近轴极限处,我们可以使用粒子的横向位置 x 和倾角 对其进行描述。之所以可以将后者看为角,是因为
受近轴条件限制。束流粒子的 x 和 x’ 值的分布即迹空间分布,包含该分布的椭圆便是迹空间椭圆。
相空间椭圆的演化过程
上图中的椭圆关于 x 轴和 vx 轴近似对称。然而,这种情况不会一直持续下去;粒子束传播时,即使没有施加任何力,椭圆形状也会改变,这只是因为沿两条坐标轴的表达式是相互关联的。根据定义 ,横向速度值为正(vx > 0)的粒子在相空间中向右移动(x 轴正方向);同样地,横向速度值为负的粒子将向左移动。下图中的动画演示了当不考虑空间电荷效应时,漂移粒子束的相空间椭圆随时间的演化状况。
若椭圆关于 x 轴和 vx 轴镜面对称,我们便称此椭圆为直立 的。直立的相空间椭圆对应的是束流轨迹上的束流腰部。
束流发射度简介
在束流物理场中,更为方便的做法是在迹空间(x-x’ 平面)中处理问题,而非在 x-vx 平面或 x-px 平面中。一部分原因在于,与横向速度或动量相比,借助倾角 x’ 对束流形状进行可视化能获取更加实用的效果。迹空间椭圆(即位于 x-x’ 平面内且包含迹空间粒子的椭圆)的通式如下
其中,参数 γ、β 及 α 被称为 Twiss 参数 或 Courant-Snyder 参数,它们都不是独立的参数,而是共同构成了 Courant-Snyder 条件,
(1)
物理量 也被称为 Courant-Snyder 不变量。
参数 γ、β、α 及 ε 可用于描述迹空间椭圆的形状、尺寸和取向,具体方式如下:
- 相对于方程(1)使用的其他参数而言,γ 是最常用的的参数,它用于描述束流的比例。ε 恒定不变,γ 增加时,束流占据的空间区域将随之减小(x 值范围缩小),与此同时速度分布随之增大(x’ 值范围扩大)。
- α 用于描述迹空间椭圆的倾斜度。在直立椭圆中,α 对应的是束流腰部,且 α = 0。若 α > 0,则为会聚束流;若 α < 0,则为发散束流。
- β 也被称为振幅函数 或电子感应加速函数,用于描述束流的比例。ε 恒定不变,β 增加时,束流占据的空间区域将随之增大(x 值范围扩大),与此同时速度分布随之减小(x’ 值范围缩小)。
- ε 用于描述迹空间椭圆的大小,又被称为发射度。因为我们正在讨论横向位置和动量,所以将其称为横向发射度 会更加形象具体。
虽然束流发射度能够描述椭圆的大小,但对于发射度和椭圆面积之间的实际关系,存在多个不同的描述方式。其中一种方式是使用椭圆的长半轴长度和短半轴长度的乘积来表示发射度,此时 A = 4πε。下方图表便使用了这一方式,同时还进一步演示了 Twiss 参数是如何影响椭圆的比例和取向的。
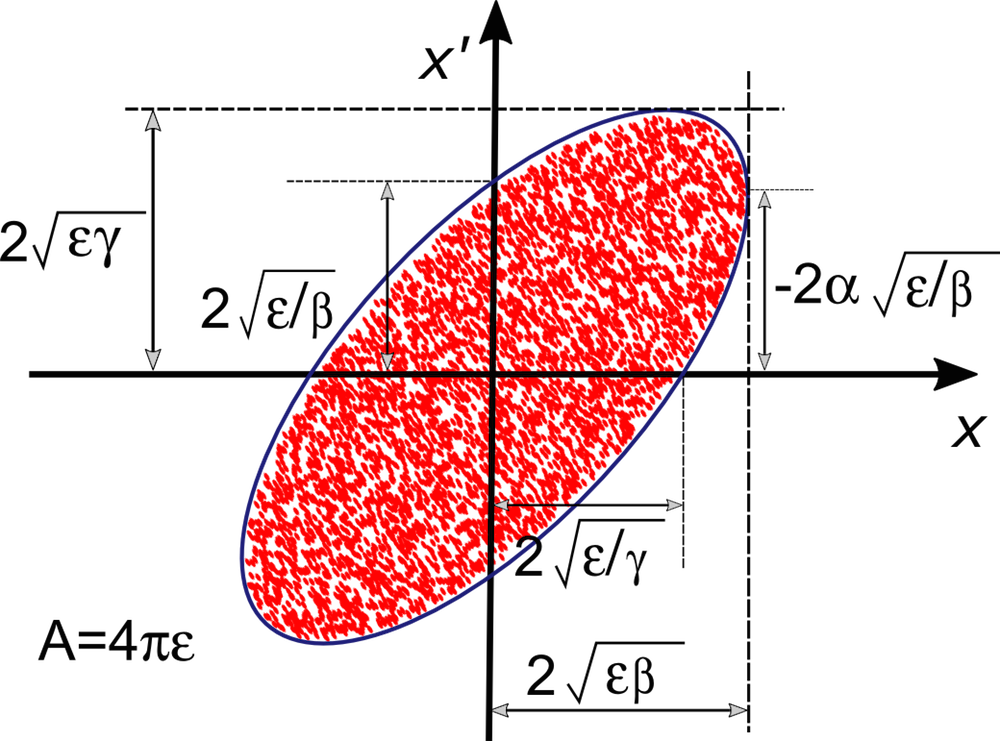
将上述的发射度乘以 4 是一种极其常见的做法,此时 A = πε。一些文献中还会将发射度除以 π,使 A = ε,这一步骤通常并不会特别说明。综上所述,在输入或阅读束流发射度记录时,我们必须确保自己了解使用的是哪一种方式。
从统计学角度解释发射度
到目前为止,我们已经确认了束流发射度的大小代表着被束流覆盖的相空间面积。除了从几何角度解释之外,我们还可以从统计学角度进行解释,即使用全部粒子的平均值来描述发射度。
均方根发射度(或 RMS 发射度)可以被定义为
(2)
\left\textless\left{(x' -(x'))}^2\right>
– \left\textless\left{(x- (x))\left(x' -(x'))\right>^2}
其中尖括号代表的是算术平均,即
在发射度的几何定义中,人们往往将 RMS 发射度的表达式乘以 4:
(3)
\left\textless\left(x' -(x'))^2\right>
– \left\textless\left(x- (x))\left(x'-(x')\right)\right>^2}
在 COMSOL Multiphysics 中,为了明确定义发射度,我们采取了额外的预防措施:将方程(2)称为 1-rms 发射度,并将方程(3)称为 4-rms 发射度。如果迹空间椭圆的中心与 x-x’ 平面的原点重合,则 ,并且方程(2)可以简化为
其中,方程左侧的项带有下标,是为了更清楚地表明它是 1-rms 发射度。同样地,Twiss 参数的统计定义可以写成(再次使用了简化假设 ):
\gamma &= \frac{(x'^2)}{\varepsilon_{1,\textrm{rms}}} \\
\beta &= \frac{(x^2)}{\varepsilon_{1,\textrm{rms}}} \\
\alpha &= -\,\frac{(xx')}{\varepsilon_{1,\textrm{rms}}}
\end{aligned}
由 Twiss 参数的统计定义可以明确看出:当大部分粒子位于迹空间的第二象限和第四象限时,则 α 为正,这说明束流正在会聚。
从统计学角度解释束流发射度还有一个好处:为了确定不规则相空间分布的面积,我们要围绕它绘制一个椭圆,但椭圆会带来一定的模糊性,而统计解释可以消除这种模糊性。同时这种方法也有一个缺点,那就是如果不存在明显的截断距离,远离束流中心的少量粒子会给发射度和 Twiss 参数出现明显的偏差。有时,这些粒子被刻意排除在束流发射度的统计定义之外,例如高斯分布“尾巴”上的粒子。
有关束流发射度的讨论
较小的束流发射度数值,通常与以下束流属性有关:
- 束流尺寸较小(x 值范围减小)
- 速度分布较窄(x’ 值范围减小)
人们通常希望尽可能地降低束流发射度。然而,在大多数情况下,束流发射度要么为恒定不变,要么还会增加。目前已有多种技术可实现束流冷却 或者发射度降低,但本系列博客不会对束流冷却技术进行深入的探讨。
为什么我们要如此关注如何降低发射度的问题?排除其他原因不谈,我们一定还记得粒子物理学的基础研究极大地推动了粒子加速器的发展,尤其是在高能物理应用领域。为了让粒子在极高的能量条件下发生碰撞,一定要保证两束粒子相交,而不是让粒子束与静止目标相交。但是,对于两条相交的束流,其碰撞截面远小于一条束流与静止目标相交时的碰撞截面。
出于上述原因,现代粒子加速器的技术目标便是使尽可能多的高能粒子进入一个狭窄空间,从而最大限度地提高碰撞概率。发射度较高意味着粒子扩散的区域面积较大或粒子速度的差异较大,后者会导致粒子占据较宽阔的区域。无论是哪个原因,都不利于提高交叉束流之间的碰撞频率。
扩展到三维环境
到目前为止,我们探讨了什么是粒子束、如何区分层束流和非层束流,以及非层束流的相空间分布是如何与横向发射度的概念联系在一起的。我们还了解到,真实的束流通常在相空间或迹空间中占据有限尺寸的区域,同时其发射度是一个品质因数,且通常在某种程度上与相空间的面积成正比。此外,我们还探讨了束流发射度的两种解释方式:相空间区域内的几何法和以束流粒子的平均值及其倾角进行表示的统计法。
本文仅对理想的二维带状电子束进行了讨论。当扩展到三维时,我们需要考虑两个正交横向上的发射度。真实的束流在轴向上也有一定的速度分布,因此会产生纵向发射度。
在下一篇博客文章中,我们将首次对三维粒子束中的相空间分布进行研究,并学习如何从相空间分布取样,以便对目前为止我们观察到的相空间椭圆进行重现。
了解更多使用 COMSOL Multiphysics® 模拟粒子追踪的内容
- 查看束流物理中相空间分布系列的全部博客文章
- 浏览“COMSOL 博客”,查阅更多关于粒子追踪模拟的博客文章
参考文献
- Humphries, Stanley. Charged Particle Beams. Courier Corporation, 2013.
- Davidson, Ronald C., and Hong Qin. Physics of intense charged particle beams in high energy accelerators. Imperial college press, 2001.
本系列博客将深入探讨粒子追踪技术在离子束和电子束仿真中的应用。我们首先会介绍概率分布函数(probability distribution function,简称 PDF)的背景知识,并展示在 COMSOL Multiphysics® 软件中对其进行随机抽样的多种方法。在后续文章中,我们还将演示如何基于该数学理论来精准地模拟真实环境中离子束和电子束的传播。
使用概率分布函数的目的
带有能量的离子束和电子束是高能物理和核物理基础研究领域的热门话题,它们也被广泛应用于阴极射线管,医用同位素的生产和核废料处理等领域。对于光束传播的精确数值仿真而言,粒子位置和速度分量的初始值是十分重要的参数。
在粒子追踪仿真中,当释放束流离子或电子时,通常情况下我们需要抽样选取部分粒子作为相空间 中的离散点。不过,在深入探讨什么是相空间,以及离子或电子如何形成相空间之前,我们先来大致了解一下概率分布函数以及如何在 COMSOL Multiphysics 中使用。
概率分布函数简介
首先,我们对相关物理量进行定义。连续随机变量 x 是一个可以取无穷多值的随机变量。举例来说,假设在长度为 L 的线段上随机选择点 x1,在线段的另一处选择第二个点 x2。假设这两点是不同的点,我们便可以在该线段上选择第三个不同点 ,然后是第四个点
,以此类推,从而获得无限多个不同的点,如下所示。
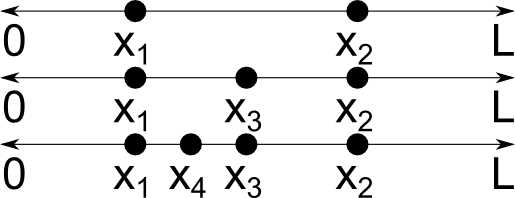
值得一提的是,另一种随机变量被称为离散随机变量,它只能取特定的值。想象你在投掷硬币或从扑克中抽取一张纸牌,这时结果的数量是有限的。
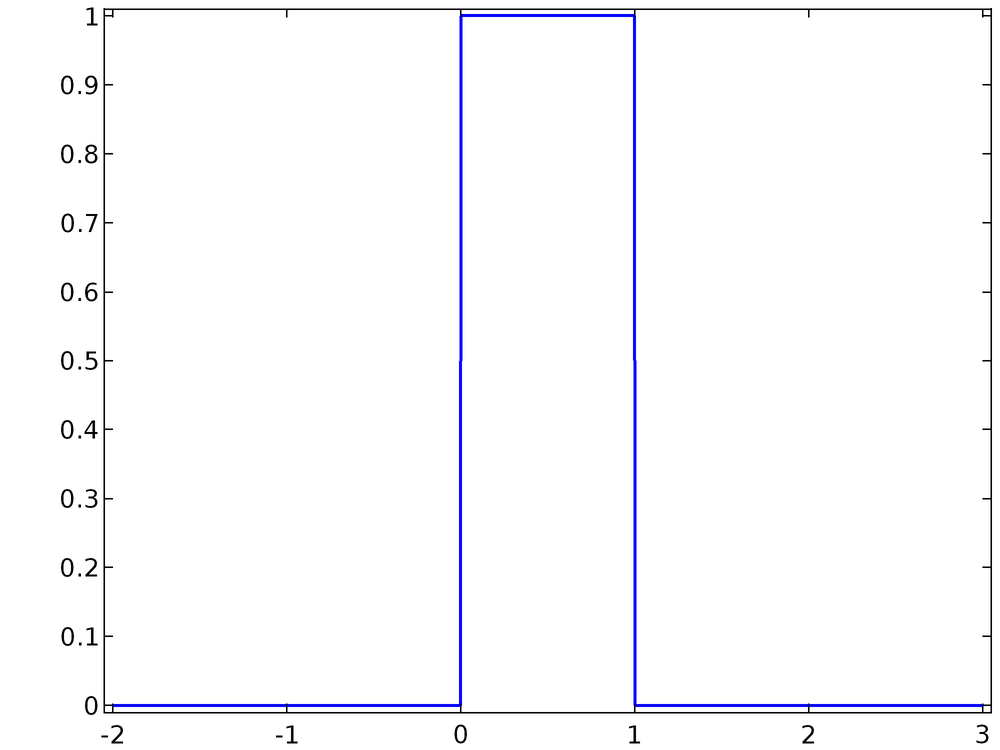
一维概率分布函数 f(x) 又称概率密度函数,主要用于描述连续随机变量的值等于给定值的概率。例如下方的概率分布函数
(1)
\begin{array}{cc}
0 & x\leq 0\\
1 & 0 \textless x \textless 1\\
0 & 1\leq x
\end{array}
\right.
对变量 x 进行了描述,该变量在开区间(0,1)内取任意值的概率是均等的,但不会在区间外取值。此 PDF 是均匀分布,其绘图如下所示。
概率分布函数同样可以用于离散随机变量,甚至适用于在某些区间内为连续、在其他区间内为离散的变量。后一类随机变量还可以被当作连续随机变量进行解释,只不过它的 PDF 包含了一个或多个狄拉克δ函数。本系列博客仅讨论连续型随机变量。
若满足以下条件,则 PDF 会被归一化
换句话说,变量 x 在范围 (-∞, ∞) 内取任意值的总概率为 1。
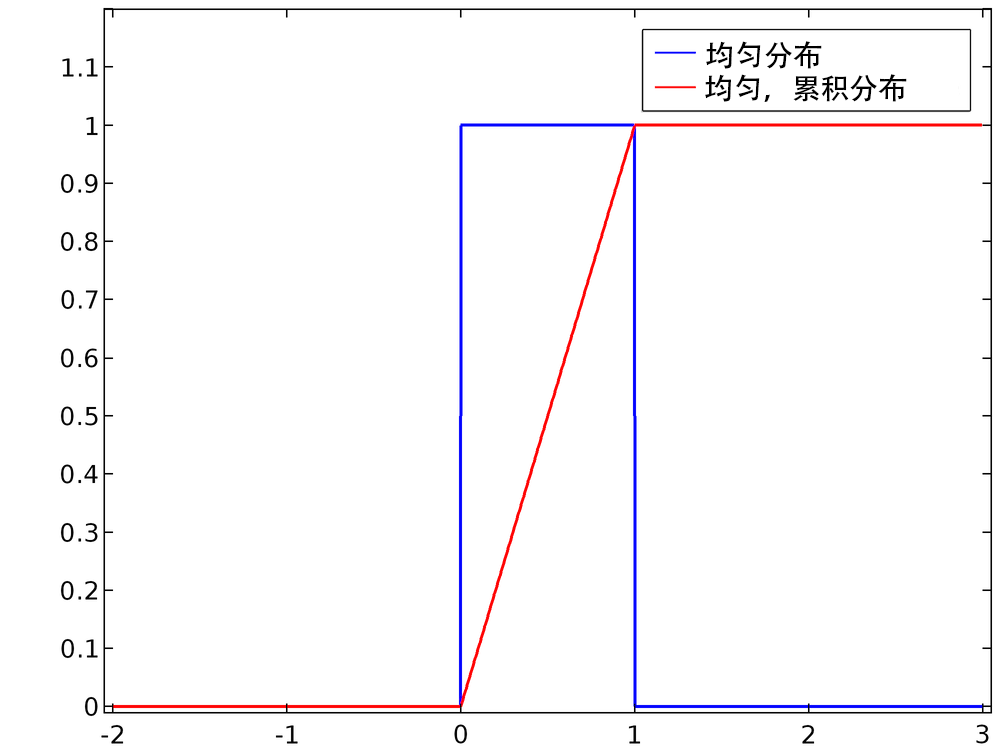
累积分布函数(cumulative distribution function,简称 CDF) F(x) 指连续随机变量的值出现在区间 (-∞, x) 内的概率。CDF 是 PDF 的积分,表示为
上述定义清楚地表明,如果概率分布函数被归一化,则
方程(1)的 PDF 及其对应的 CDF 见下方图表。很明显,PDF已经被归一化了。
从一维分布中抽样
从均匀分布中随机取值通常是十分容易的。在大多数编程语言中,有非常多的程序可用于生成均匀分布的随机数。然而有时我们可能需要处理更加任意的分布,如下图所示。
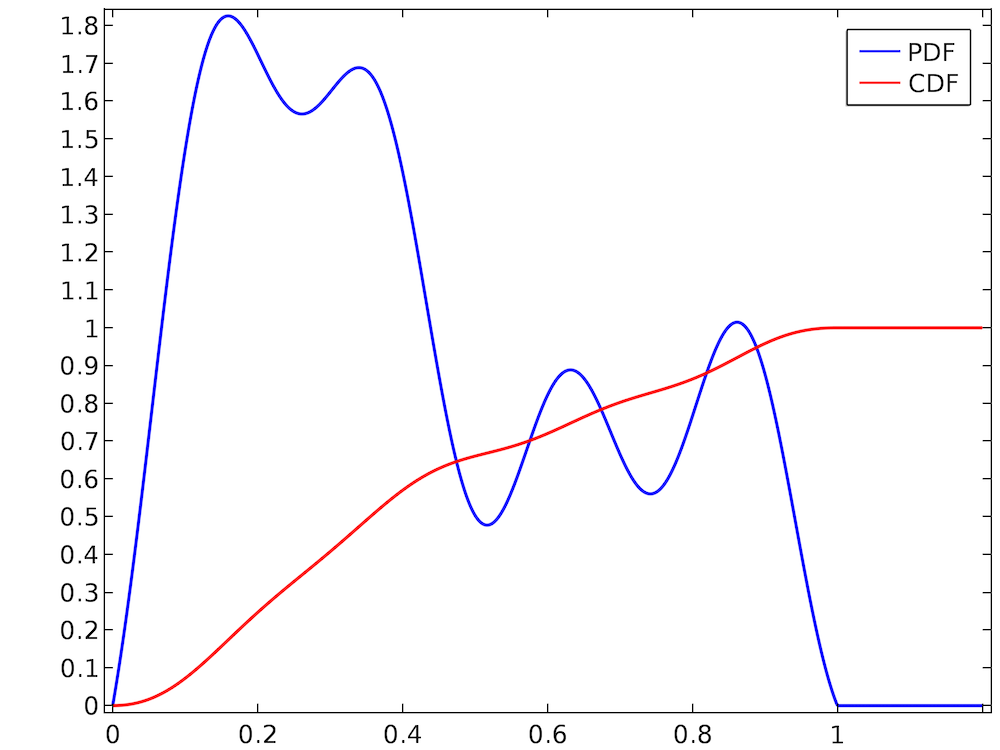
随机数在区间 (0, 1) 内取值,CDF 的最终值为 1,这表示 PDF 已被归一化。但是,随机数的分布显然并不均匀;例如相比于 (0.7, 0.8),随机数更有可能出现在范围 (0.2, 0.3) 内。在这种情况下,直接使用内置程序对间隔 (0, 1) 内均匀分布的随机数进行抽样,可能并不正确;我们必须想出另一种方法,从这个看似任意的 PDF 中抽取随机数。
为此,我们采用了一种从概率分布函数中取值的最基本方法——逆变换抽样。现在,将 U 定义为 0 到 1 之间均匀分布的随机数。换句话说,U 遵循方程(1)表示的分布函数。接着,为了从(可能不均匀的)概率分布函数 f(x) 中抽样随机数,我们需要执行了下列操作:
- 若函数 f(x) 尚未被归一化,则对其进行归一化。
- 求解归一化的 PDF f(x) 的积分,并由此计算出 CDF F(x) 的值。
- 对函数 F(x) 求逆,得出逆累积分布函数 或者分位数函数 F-1(x)。由于我们对 f(x) 进行了归一化,所以亦可称之为逆正态累积分布函数,或将其简单表述为逆正态 CDF。
- 将均匀分布的随机数 U 的值代入逆正态 CDF。
总而言之,当 时,F-1(U) 是满足概率分布函数 f(x) 的随机数。接下来,我们将讨论一个具体案例,帮助您了解如何通过这种途径对不均匀的概率分布函数进行抽样。
示例 1:Rayleigh 分布
Rayleigh 分布 经常出现在稀薄气体动力学和束流物理的方程中,其表达式为
(2)
\begin{array}{cc}
0 & x \textless 0 \\
\frac{x}{\sigma^2} \exp\left(-\frac{x^2}{2\sigma^2}\right) & x\geq 0
\end{array}
\right.
其中 σ 是待指定的比例因子。如下所示,我们可以证实上方的 Rayleigh 分布函数已被归一化。
\int_{0}^{\infty} \frac{x}{\sigma^2} \exp\left(-\frac{x^2}{2\sigma^2}\right)dx
&= \lim_{x \rightarrow \infty} \left.-\exp\left(-\frac{x^\prime^2}{2\sigma^2}\right)\right|^x_0\\
&= 1-\lim_{x \rightarrow \infty}\exp\left(-\frac{x^2}{2\sigma^2}\right)\\
&= 1
\end{aligned}
它的累积分布函数为
F(x)
&=\int_{0}^{x} \frac{x^\prime}{\sigma^2} \exp\left(-\frac{x^\prime^2}{2\sigma^2}\right)dx^\prime\\
&= \left.-\exp\left(-\frac{x^\prime^2}{2\sigma^2}\right)\right|^x_0\\
&= 1-\exp\left(-\frac{x^2}{2\sigma^2}\right)
\end{aligned}
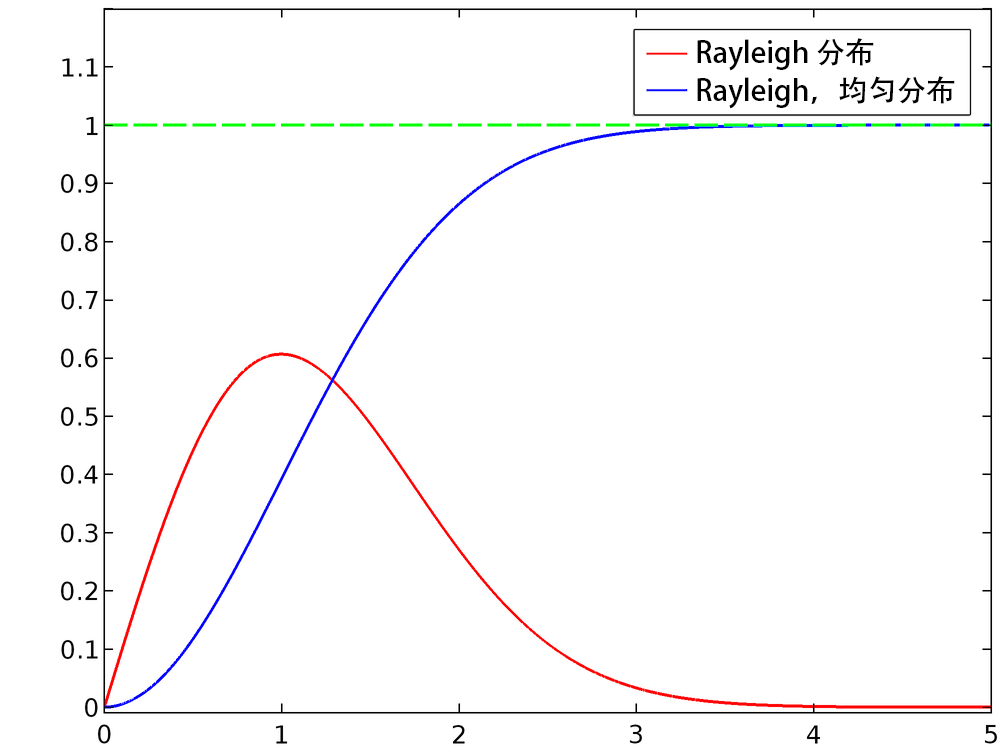
下图绘制了当 σ = 1 时归一化的 Rayleigh 分布和它的累积分布函数。当 x 逐渐变大时,CDF 显然接近 1。
为了计算逆正态 CDF,我们设 y = F(x) 并求解 x 的值:
y &= F(x)\\
y &= 1-\exp\left(-\frac{x^2}{2\sigma^2}\right)\\
\exp\left(-\frac{x^2}{2\sigma^2}\right) &= 1-y\\
-\frac{x^2}{2\sigma^2} &= \log\left(1-y\right)\\
x &= \sigma \sqrt{-2 \log\left(1-y\right)}
\end{aligned}
现在将变量 y 替换为均匀分布的随机数 U,则
由于 U 在区间 (0, 1) 内呈均匀分布,并且其值当前未知,考虑上述情况,我们通过使 U 和 1 – U 精确遵循相同的概率分布函数,从而进一步简化上方的表达式。由此,我们得到了 x 的抽样值的最终表达式,
(3)
接下来,我们将讨论如何在 COMSOL 模型中通过使用方程(3)对 Rayleigh 分布的值进行抽样。
请注意,在计算逆正态 CDF 时,上述分析方法并非总是可行的。对于任何函数的积分,不一定始终存在闭合的解析解,而且累积分布函数的逆函数不一定存在对应的表达式。本文特意选择 Rayleigh 分布作为案例,正是因为我们可以推导出它的逆正态 CDF,而不需要数值或近似方法。
在 COMSOL Multiphysics® 中随机抽样
我们可以借助上述分析结果在 COMSOL Multiphysics 中对任意一维分布(例如 Rayleigh 分布)进行抽样。我们首先来介绍一下可用于从特定类型分布中抽样的内置工具。
在 COMSOL Multiphysics 中,我们有多种定义伪随机数(稍后我们会解释“伪随机”的含义)的方法。例如,您可以使用全局定义 节点或定义 节点中的随机 函数特征,通过均匀分布或正态分布定义伪随机数。如果使用的是均匀 分布,请指定平均值 和范围。若平均值为 μu 且范围为 σu,则 PDF 为
\begin{array}{cc}
0 & x \leq \mu_u-\frac{\sigma_u}{2}\\
\frac{1}{\sigma_u} & \mu_u-\frac{\sigma_u}{2} \textless x \textless \mu_u + \frac{\sigma_u}{2}\\
0 & \mu_u + \frac{\sigma_u}{2} \leq x\\
\end{array}
\right.
当平均值为 1 且范围为 1.5 时,均匀分布的示例图如下。

当使用正态 分布或高斯分布时,请指定平均值 和标准偏差。若平均值为 μn 且标准偏差为 σn,则 PDF 为
当平均值设为 1,标准偏差为设 1.5,正态分布的示例图如下。与均匀分布的相同点在于,正态分布的曲线呈锯齿状,并且不可预测;不同之处是越靠近 y = 1,曲线上的点就越密集,而越向两边越稀疏。

在默认设置中,平均值为 0,范围或标准偏差为 1,此时两种分布的对比图如下。
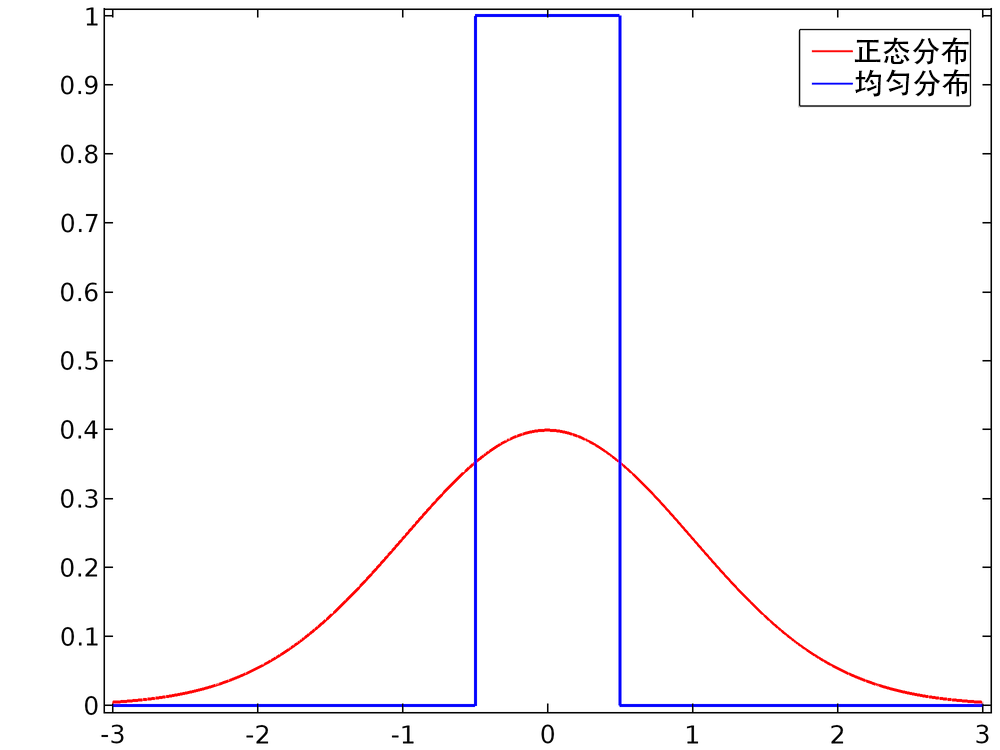
对比范围为 1 的均匀 PDF 和标准偏差为 1 的高斯 PDF。
除了“随机”函数特征,您也可以在任意表达式中使用内置函数 random 和randomnormal。random 函数呈均匀分布,平均值为 0,范围为 1; randomnormal 函数呈正态分布,平均值为 0,标准偏差为 1。
对于方程(3),我们需要在区间 (0, 1) 中均匀抽取一个数 U,有两种方法可以实现这一操作:
- 使用“随机”函数特征,并将平均值设为 0.5,范围设为 1。
- 使用内置的
random函数,并将平均值和范围增加 0.5。
尽管两种方法均是可行的,不过我们将在下文中采用第二种方法。
随机数,伪随机数与种伪随机种子
正如前文所述,采用上述方法的目的是生成伪随机数。伪随机数 指以初始值或种子 为起点,通过确定方式生成的随机数。对于内置的 random 函数来说,种子相当于函数的一个或多个变元。对比而言,真正的随机数不能仅仅凭靠一个程序而生成,它来源于自然的熵增——一种本质上不可预测、不可重复的自然过程,例如放射性衰减或大气噪声。
在许多方面,伪随机数使用起来会比真随机数更为方便。伪随机数的重复性特征可被用于排除 Monte Carlo 仿真的故障,这是因为使用同一个种子多次运行仿真可以得到相同的结果,这让识别模型的变化变得十分简单。由于不需要自然熵源,因而只能在有限的时间内从环境中收获有限的熵,所以伪随机数所需的仿真时间少于真随机数。
然而伪随机数也存在一些缺点,我们必须采取一些额外的预防措施。种子的数值不同,伪随机数也就不同,但是,相同的种子会反复生成相同的数字。若您想在任意的 COMSOL 模型中验证这一点,可以创建一个“全局计算”节点,并使用恒定种子反复对内置的 random 函数进行计算。现在假设该函数为 random(1),如下图所示,输出结果与“1”之间不存在明显的关联,因此从这个意义上来说似乎确实是“随机”的;然而若对表达式进行多次计算,得到的值则始终相同,并不会呈现随机分布。

如果在每一次计算随机数时都使用不同的种子,那么每一次都会获得不同的结果。在下方的屏幕截图中,表格中的时间被用作随机函数的输入变元,我们可以将下图的计算结果与上图进行对比。

当模拟粒子系统时,Monte Carlo 仿真往往包含了大量的粒子集群,这些粒子在随机的初始条件下被释放,并受随机力的支配。此类涉及到粒子群随机现象的案例包括:
- 分布中抽样——本系列中后续的博客文章将对这些内容进行探讨
- 在稀薄背景气体中由随机电荷交换碰撞引起的离子中和
- 高雷诺数流体流动中粒子的湍流分散
- 模拟布朗运动引起的粒子扩散
显然,如果每个粒子得到了完全相同的伪随机数,那么仿真将完全与物理现场相悖。举例来说,就是当离子与背景气体相互作用时,所有离子会在同一时刻与气体分子或原子发生碰撞。为了让粒子是独一无二的,粒子仿真中涉及到的随机数必须具有唯一的种子。
一种方法是将粒子索引 用作种子的一部分,得到的整数与每一个粒子唯一对应。粒子索引变量为 <scope>.pidx,其中 <scope> 是物理场接口实例的唯一标识符。在数学粒子追踪 接口中,粒子索引通常为 pt.pidx 。函数 random(pt.pidx) 将为每个粒子分配不同的伪随机数。
若粒子在整个过程中都由随机的力支配,这将产生一个新的问题。举例来说,当使用随机数确定离子是否与气体分子发生碰撞时,您可不希望每一次都为特定粒子分配同一个随机数——否则的话,粒子只能在一个时间步长上发生碰撞或者干脆不碰撞!解决方案是:在随机数种子中引入多个变元,使其至少包含一个与其他粒子不同的变元和一个随仿真时间变化的变元。如果仿真需要对多个伪随机数进行互不干涉的抽样,那么或许需要再添加新变元。随机函数在使用时通常采取 random(pt.pidx,t,1) 的形式,当然,如果确实需要额外的独立伪随机数,我们可以将最终变元 1 替换成其他数字。
Rayleigh 分布的结果
我们来回顾一下最初的 Rayleigh 分布抽样问题。假设我们有一个粒子群,并希望对每个粒子抽样一个数,使结果值符合 Rayleigh 分布。此案例中我们会使用到 σ = 3 的方程(2)。在 COMSOL 模型中定义以下变量:
| 名称 | 表达式 | 描述 |
|---|---|---|
rn | 0.5+random(pt.pidx) | Random argument |
sigma | 3 | Scale parameter |
val | sigma*sqrt(-2*log(rn)) | Value sampled from Rayleigh distribution |
请注意,最后一行便是方程(3)。下方的直方图为由 1000 个粒子组成的集群的 rn 值。平滑曲线代表精确 Rayleigh 分布,在这里,我们通过解析 函数特征对其进行定义。
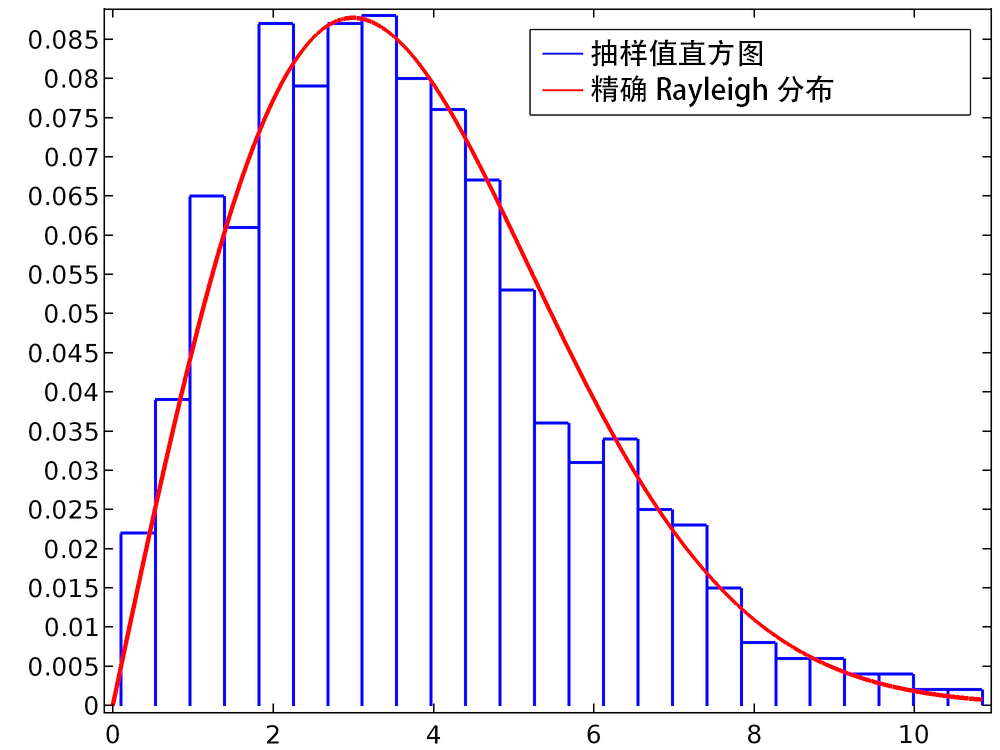
如果您想绘制出包含更丰富信息的精细曲线,那么需要添加更多的粒子来精确地捕获概率分布函数。
插值函数的注意事项
如果将概率分布函数作为插值 函数特征,而不是解析 或分段 函数输入到 COMSOL Multiphysics 中,那么便可通过内置功能自动对随机函数进行定义,此随机函数会从指定的 PDF 中进行抽样。
假设我们的插值函数会对下表中的数据点进行线性插值:
| x | f(x) |
|---|---|
| 0 | 0 |
| 0.2 | 0.6 |
| 0.4 | 0.7 |
| 0.6 | 1.2 |
| 0.8 | 1.2 |
| 1 | 0 |
下方的软件截图演示了如何将这些数据输入到“插值”函数中。具体操作方式是打开“插值”函数特征的设置窗口,并勾选定义随机函数 复选框,便能自动对函数 rn_int1 进行定义,此函数可对该分布进行抽样。在“图形”窗口中,直方图显示了 1000 个数据点的随机抽样结果,连续曲线便是插值函数本身。我们还添加了 20 和 0.74 这两个额外的因子,分别用于修正直方图柱条的数目和对插值函数进行归一化处理。

概率分布函数的优势
在本文中,我们解释了概率分布函数、累积分布函数以及与各自逆函数之间的关系。同时还探讨了几种适用于对 COMSOL 模型中的均匀和非均匀概率分布函数进行抽样的技术。在束流物理场中的相空间分布系列的下一篇文章中,我们将对离子束和电子束的物理现象进行阐述,并会阐述为何概率分布函数对于准确模拟束流系统来说是至关重要的。
参考文献
- Humphries, Stanley. Charged particle beams. Courier Corporation, 2013.
- Davidson, Ronald C., and Hong Qin. Physics of intense charged particle beams in high energy accelerators. Imperial college press, 2001.